JP7544010B2 - マップデータ、マップ更新方法、車両制御方法、及び車両制御システム - Google Patents
マップデータ、マップ更新方法、車両制御方法、及び車両制御システム Download PDFInfo
- Publication number
- JP7544010B2 JP7544010B2 JP2021149637A JP2021149637A JP7544010B2 JP 7544010 B2 JP7544010 B2 JP 7544010B2 JP 2021149637 A JP2021149637 A JP 2021149637A JP 2021149637 A JP2021149637 A JP 2021149637A JP 7544010 B2 JP7544010 B2 JP 7544010B2
- Authority
- JP
- Japan
- Prior art keywords
- map data
- map
- vehicle
- road
- vertical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 37
- 230000033001 locomotion Effects 0.000 claims description 59
- 230000008569 process Effects 0.000 claims description 28
- 238000006073 displacement reaction Methods 0.000 description 148
- 239000010410 layer Substances 0.000 description 57
- 238000010586 diagram Methods 0.000 description 23
- 230000001133 acceleration Effects 0.000 description 19
- 239000000725 suspension Substances 0.000 description 18
- 230000006854 communication Effects 0.000 description 16
- 238000004891 communication Methods 0.000 description 15
- 238000012545 processing Methods 0.000 description 11
- 238000013016 damping Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 7
- 238000000926 separation method Methods 0.000 description 5
- 238000001914 filtration Methods 0.000 description 4
- 230000001629 suppression Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 239000002356 single layer Substances 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000004807 localization Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/02—Registering or indicating driving, working, idle, or waiting time only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/06—Characteristics of dampers, e.g. mechanical dampers
- B60G17/08—Characteristics of fluid dampers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0165—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input to an external condition, e.g. rough road surface, side wind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/10—Acceleration; Deceleration
- B60G2400/102—Acceleration; Deceleration vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/20—Speed
- B60G2400/204—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/25—Stroke; Height; Displacement
- B60G2400/252—Stroke; Height; Displacement vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/80—Exterior conditions
- B60G2400/82—Ground surface
- B60G2400/821—Uneven, rough road sensing affecting vehicle body vibration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2401/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60G2401/14—Photo or light sensitive means, e.g. Infrared
- B60G2401/142—Visual Display Camera, e.g. LCD
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2401/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60G2401/16—GPS track data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2401/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60G2401/17—Magnetic/Electromagnetic
- B60G2401/174—Radar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/10—Damping action or damper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/70—Computer memory; Data storage, e.g. maps for adaptive control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/70—Estimating or calculating vehicle parameters or state variables
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Vehicle Body Suspensions (AREA)
Description
マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、第1レイヤマップデータと第2レイヤマップデータの少なくとも一つを含むデータ構造を有する。第1レイヤマップデータは、第1道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。一方、第2レイヤマップデータは、第2道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。
マップ更新方法は、車輪位置の時系列データと上下運動パラメータの時系列データに基づいてマップデータを更新する処理を含む。
マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、第1レイヤマップデータと第2レイヤマップデータの少なくとも一つを含むデータ構造を有する。第1レイヤマップデータは、第1道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。一方、第2レイヤマップデータは、第2道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。
マップデータを更新する処理は、
車輪位置の垂直位置に対応するレイヤマップデータがマップデータに存在するか否かを判定する処理と、
車輪位置の垂直位置に対応するレイヤマップデータが存在する場合、車輪位置の垂直位置に対応するレイヤマップデータを選択して更新する処理と
を含む。
車両制御方法は、
車両の車輪の上下運動に関連する上下運動パラメータに関するマップデータを取得する処理と、
マップデータから取得される上下運動パラメータに基づいて対象車両を制御する処理と
を含む。
マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、第1レイヤマップデータと第2レイヤマップデータの少なくとも一つを含むデータ構造を有する。第1レイヤマップデータは、第1道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。一方、第2レイヤマップデータは、第2道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。
特定エリアにおいて対象車両を制御する処理は、
対象車両の垂直位置に対応するレイヤマップデータがマップデータに存在するか否かを判定する処理と、
対象車両の垂直位置に対応するレイヤマップデータが存在する場合、対象車両の垂直位置に対応するレイヤマップデータから上下運動パラメータを取得する処理と
を含む。
車両制御システムは、1又は複数のプロセッサを備える。
1又は複数のプロセッサは、
車両の車輪の上下運動に関連する上下運動パラメータに関するマップデータを取得する処理と、
マップデータから取得される上下運動パラメータに基づいて対象車両を制御する処理と
を実行するように構成される。
マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、第1レイヤマップデータと第2レイヤマップデータの少なくとも一つを含むデータ構造を有する。第1レイヤマップデータは、第1道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。一方、第2レイヤマップデータは、第2道路の水平位置と垂直位置と上下運動パラメータとの対応関係を示す。
特定エリアにおいて対象車両を制御する処理は、
対象車両の垂直位置に対応するレイヤマップデータがマップデータに存在するか否かを判定する処理と、
対象車両の垂直位置に対応するレイヤマップデータが存在する場合、対象車両の垂直位置に対応するレイヤマップデータから上下運動パラメータを取得する処理と
を含む。
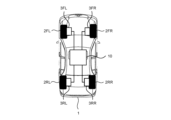
図1は、本実施の形態に係る車両1の構成例を示す概略図である。車両1は、車輪2とサスペンション3を備えている。車輪2は、左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRを含んでいる。それら左前輪2FL、右前輪2FR、左後輪2RL、及び右後輪2RRのそれぞれに対してサスペンション3FL、3FR、3RL、及び3RRが設けられている。以下の説明では、特に区別の必要が無い場合、各車輪を車輪2と呼び、各サスペンションをサスペンション3と呼ぶ。
2-1.構成例
図4は、本実施の形態に係る車両制御システム10の構成例を示すブロック図である。車両制御システム10は、車両1に搭載され、車両1を制御する。車両制御システム10は、車両状態センサ20、認識センサ30、位置センサ40、通信装置50、走行装置60、及び制御装置70を含んでいる。
図5は、車両1の運転環境を示す運転環境情報90の一例を示すブロック図である。運転環境情報90は、記憶装置72に格納される。運転環境情報90は、地図情報91、車両状態情報92、周辺状況情報93、及び位置情報94を含んでいる。
制御装置70は、車両1の走行を制御する車両走行制御を実行する。車両走行制御は、操舵制御、駆動制御、及び制動制御を含む。制御装置70は、走行装置60(操舵装置61、駆動装置62、及び制動装置63)を制御することによって車両走行制御を実行する。制御装置70は、運転環境情報90に基づいて、車両1の運転を支援する運転支援制御を行ってもよい。運転支援制御としては、車線維持制御、衝突回避制御、自動運転制御、等が例示される。
3-1.構成例
図6は、本実施の形態に係るマップ管理システム100の構成例を示すブロック図である。マップ管理システム100は、各種の地図情報を管理するコンピュータである。地図情報の管理は、地図情報の生成、更新、提供、配信、等を含む。典型的には、マップ管理システム100は、クラウド上の管理サーバである。マップ管理システム100は、複数のサーバが分散処理を行う分散システムであってもよい。
マップ管理システム100が管理する地図情報の一つが、「ばね下変位マップ(上下運動パラメータマップ)200」である。ばね下変位マップ200は、ばね下変位Zu(上下運動パラメータ)に関する地図である。ばね下変位マップ200は、記憶装置130に格納されている。
プロセッサ120は、通信装置110を介して、多数の車両1から情報を収集する。そして、プロセッサ120は、多数の車両1から収集した情報に基づいて、ばね下変位マップ200の生成及び更新を行う。以下、マップ生成/更新処理の例について更に詳しく説明する。
車両1の車両制御システム10が、ばね下変位マップ200のデータベースを保持し、自身のばね下変位マップ200の生成/更新を行ってもよい。つまり、マップ管理システム100は車両制御システム10に含まれていてもよい。
車両制御システム10の制御装置70は、通信装置50を介してマップ管理システム100と通信を行う。制御装置70は、車両1の現在位置を含むエリアのばね下変位マップ200をマップ管理システム100から取得する。ばね下変位マップ200は、記憶装置72に格納される。そして、制御装置70は、ばね下変位マップ200に基づいて、制振制御の一種である「プレビュー制御」を実行する。

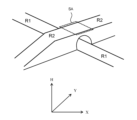
図11は、立体交差を説明するための概略図である。XY面は水平面を表す。水平位置(X,Y)は、水平面における位置である。垂直位置Hは、水平面に直交する垂直方向の位置である。例えば、水平位置(X,Y)は、緯度と経度により定義される。垂直位置Hは、高度(標高)により定義される。高度としては、海抜、ジオイド高、楕円体高、等が例示される。
図12は、立体交差を含む特定エリアSAに関するばね下変位マップ200の一例を説明するための概念図である。特定エリアSAに関するばね下変位マップ200のデータ構造は、第1レイヤマップデータ200-1と第2レイヤマップデータ200-2を含んでいる。第1レイヤマップデータ200-1は、第1道路R1の水平位置(X,Y)と垂直位置Hとばね下変位Zuとの対応関係を示す。一方、第2レイヤマップデータ200-2は、第2道路R2の水平位置(X,Y)と垂直位置Hとばね下変位Zuとの対応関係を示す。すなわち、特定エリアSAに関するばね下変位マップ200はマルチレイヤ化されている。
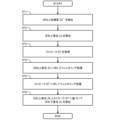
次に、立体交差を考慮したマップ生成/更新処理について説明する。既出の図8で示されたように、ステップS100において、マップ管理システム100のプロセッサ120は、車両1(車両制御システム10)からマップ更新用情報を取得する。そのマップ更新用情報は、車両1の水平位置(X,Y)と垂直位置Hを示す位置情報94を含んでいる。その他、マップ更新用情報は、ばね下変位マップ200の更新に必要な情報(車輪位置、センサベース情報、ばね下変位Zu等)を含む。ステップS100の後のステップS200において、プロセッサ120は、マップ更新用情報に基づいて、ばね下変位マップ200を生成/更新する。
図16は、特定エリアSAにおける車両制御処理を示すフローチャートである。車両制御処理の対象となる車両1を、便宜上、「対象車両1T」と呼ぶ。
以上に説明されたように、本実施の形態によれば、立体交差にも対応したばね下変位マップ200が提供される。
5-5-1.第1の変形例
図17は、特定エリアSAに関するばね下変位マップ200の第1の変形例を説明するための概念図である。特定エリアSAに関するばね下変位マップ200のデータ構造は、第1レイヤマップデータ200-1と第2レイヤマップデータ200-2のうち一方だけを含み、他方を含んでいなくてもよい。
第2の変形例では、特定エリアSAに関するばね下変位マップ200は、垂直位置H及びばね下変位Zuの情報の代わりに、「特定エリアフラグ」を有する。ばね下変位マップ200から特定エリアフラグが読み出された場合、ばね下変位マップ200を利用した車両制御は行われない。その代わり、ばね下変位マップ200を利用しない車両制御が行われてもよい(ステップS40)。
2 車輪
3 サスペンション
3A アクチュエータ
10 車両制御システム
20 車両状態センサ
30 認識センサ
40 位置センサ
50 通信装置
60 走行装置
70 制御装置
80 車両制御プログラム
90 運転環境情報
93 周辺状況情報
94 位置情報
100 マップ管理システム
110 通信装置
120 プロセッサ
130 記憶装置
140 マップ管理プログラム
200 ばね下変位マップ
200-1 第1レイヤマップデータ
200-2 第2レイヤマップデータ
SA 特定エリア
R1 第1道路
R2 第2道路
Zu ばね下変位
Claims (3)
- 車両の車輪の上下運動に関連する上下運動パラメータに関するマップデータを更新するマップ更新方法であって、
車輪位置の時系列データと前記上下運動パラメータの時系列データに基づいて前記マップデータを更新する処理を含み、
前記マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、前記第1道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第1レイヤマップデータと、前記第2道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第2レイヤマップデータの少なくとも一つを含むデータ構造を有し、
前記マップデータを更新する処理は、
前記車輪位置の垂直位置に対応するレイヤマップデータが前記マップデータに存在するか否かを判定する処理と、
前記車輪位置の前記垂直位置に対応する前記レイヤマップデータが存在する場合、前記車輪位置の前記垂直位置に対応する前記レイヤマップデータを選択して更新する処理と
を含む
マップ更新方法。 - 車両の車輪の上下運動に関連する上下運動パラメータに関するマップデータを取得する処理と、
前記マップデータから取得される前記上下運動パラメータに基づいて対象車両を制御する処理と
を含み、
前記マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、前記第1道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第1レイヤマップデータと、前記第2道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第2レイヤマップデータの少なくとも一つを含むデータ構造を有し、
前記特定エリアにおいて前記対象車両を制御する処理は、
前記対象車両の垂直位置に対応するレイヤマップデータが前記マップデータに存在するか否かを判定する処理と、
前記対象車両の前記垂直位置に対応する前記レイヤマップデータが存在する場合、前記対象車両の前記垂直位置に対応する前記レイヤマップデータから前記上下運動パラメータを取得する処理と
を含む
車両制御方法。 - 1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
車両の車輪の上下運動に関連する上下運動パラメータに関するマップデータを取得する処理と、
前記マップデータから取得される前記上下運動パラメータに基づいて対象車両を制御する処理と
を実行するように構成され、
前記マップデータは、第1道路と第2道路が立体的に交差する特定エリアに関して、前記第1道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第1レイヤマップデータと、前記第2道路の水平位置と垂直位置と前記上下運動パラメータとの対応関係を示す第2レイヤマップデータの少なくとも一つを含むデータ構造を有し、
前記特定エリアにおいて前記対象車両を制御する処理は、
前記対象車両の垂直位置に対応するレイヤマップデータが前記マップデータに存在するか否かを判定する処理と、
前記対象車両の前記垂直位置に対応する前記レイヤマップデータが存在する場合、前記対象車両の前記垂直位置に対応する前記レイヤマップデータから前記上下運動パラメータを取得する処理と
を含む
車両制御システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021149637A JP7544010B2 (ja) | 2021-09-14 | 2021-09-14 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
| US17/864,503 US12026991B2 (en) | 2021-09-14 | 2022-07-14 | Non-transitory computer-readable recording medium, map updating method, vehicle control method, and vehicle control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021149637A JP7544010B2 (ja) | 2021-09-14 | 2021-09-14 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023042372A JP2023042372A (ja) | 2023-03-27 |
| JP7544010B2 true JP7544010B2 (ja) | 2024-09-03 |
Family
ID=85479710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021149637A Active JP7544010B2 (ja) | 2021-09-14 | 2021-09-14 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12026991B2 (ja) |
| JP (1) | JP7544010B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7544010B2 (ja) * | 2021-09-14 | 2024-09-03 | トヨタ自動車株式会社 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
| JP7544009B2 (ja) * | 2021-09-14 | 2024-09-03 | トヨタ自動車株式会社 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001296132A (ja) | 2000-04-13 | 2001-10-26 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2004151910A (ja) | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 車両走行支援装置および方法 |
| WO2006109798A1 (ja) | 2005-04-11 | 2006-10-19 | Yoshihiro Suda | 車両、車両側システム、道路構造情報報知装置、カーナビゲーションシステムおよび道路情報管理システム |
| US20130328863A1 (en) | 2012-06-10 | 2013-12-12 | Apple Inc. | Computing plausible road surfaces in 3d from 2d geometry |
| JP2019066631A (ja) | 2017-09-29 | 2019-04-25 | パイオニア株式会社 | 地図データ構造 |
| US20210276566A1 (en) | 2020-03-04 | 2021-09-09 | Toyota Jidosha Kabushiki Kaisha | Preview damping control apparatus for vehicle and preview damping control method for vehicle |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2494528B (en) * | 2011-09-06 | 2014-01-29 | Jaguar Land Rover Ltd | Improvements in vehicle suspension control |
| EP4450845A2 (en) * | 2013-03-15 | 2024-10-23 | ClearMotion, Inc. | Active vehicle suspension improvements |
| US9576200B2 (en) * | 2014-12-17 | 2017-02-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Background map format for autonomous driving |
| JP6705368B2 (ja) * | 2016-12-06 | 2020-06-03 | トヨタ自動車株式会社 | 自動運転装置 |
| KR102587419B1 (ko) * | 2019-03-27 | 2023-10-10 | 히다치 아스테모 가부시키가이샤 | 서스펜션 제어 장치 |
| US11333505B2 (en) * | 2019-09-18 | 2022-05-17 | Here Global B.V. | Method and system to generate updated map data for parallel roads |
| US11566906B2 (en) * | 2019-10-01 | 2023-01-31 | Here Global B.V. | Method, apparatus, and system for generating vehicle paths in a limited graph area |
| US20220379679A1 (en) * | 2019-11-04 | 2022-12-01 | ClearMotion, Inc. | Vehicle system control based on road feature detection and classification |
| JP7414150B2 (ja) * | 2020-09-09 | 2024-01-16 | 株式会社デンソー | 地図サーバ、地図配信方法 |
| JP7322855B2 (ja) * | 2020-10-23 | 2023-08-08 | トヨタ自動車株式会社 | 路面情報作成装置及び車両制御システム |
| JP7544010B2 (ja) * | 2021-09-14 | 2024-09-03 | トヨタ自動車株式会社 | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム |
-
2021
- 2021-09-14 JP JP2021149637A patent/JP7544010B2/ja active Active
-
2022
- 2022-07-14 US US17/864,503 patent/US12026991B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001296132A (ja) | 2000-04-13 | 2001-10-26 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2004151910A (ja) | 2002-10-30 | 2004-05-27 | Hitachi Ltd | 車両走行支援装置および方法 |
| WO2006109798A1 (ja) | 2005-04-11 | 2006-10-19 | Yoshihiro Suda | 車両、車両側システム、道路構造情報報知装置、カーナビゲーションシステムおよび道路情報管理システム |
| US20130328863A1 (en) | 2012-06-10 | 2013-12-12 | Apple Inc. | Computing plausible road surfaces in 3d from 2d geometry |
| JP2019066631A (ja) | 2017-09-29 | 2019-04-25 | パイオニア株式会社 | 地図データ構造 |
| US20210276566A1 (en) | 2020-03-04 | 2021-09-09 | Toyota Jidosha Kabushiki Kaisha | Preview damping control apparatus for vehicle and preview damping control method for vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| US12026991B2 (en) | 2024-07-02 |
| US20230077687A1 (en) | 2023-03-16 |
| JP2023042372A (ja) | 2023-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10486485B1 (en) | Perception based suspension control | |
| US10409288B2 (en) | Systems and methods for projecting a location of a nearby object into a map according to a camera image | |
| US12026991B2 (en) | Non-transitory computer-readable recording medium, map updating method, vehicle control method, and vehicle control system | |
| US20230419824A1 (en) | Method and device for determining traffic stream information, electronic equipment and storage medium | |
| JP2019510240A (ja) | 車両認知を提供するためのシステム及び方法 | |
| US11161501B2 (en) | System and method for optimizing a path for obstacle evasion for a vehicle | |
| JP7103161B2 (ja) | 地図情報システム | |
| CN113525406A (zh) | 用于车辆运动控制器的基于贝叶斯全局优化的参数调谐 | |
| US11761769B2 (en) | Localization adaptation based on weather estimation | |
| US11708086B2 (en) | Optimization for distributing autonomous vehicles to perform scouting | |
| US20230081887A1 (en) | Vehicle position estimation method and vehicle control system | |
| US11874857B2 (en) | System and method for generating shard data based on semantic map sharding | |
| JP7544009B2 (ja) | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム | |
| US10634924B2 (en) | Display projector operation | |
| US20230311931A1 (en) | Systems and methods for control state estimation of vehicles | |
| US11898854B2 (en) | Generating shard data from a geographical area split in sections | |
| US11981347B2 (en) | Rules based semantic map sharding | |
| JP7328626B2 (ja) | 車両の制振制御システム | |
| JP2023044481A (ja) | マップデータ、マップ更新方法、車両制御方法、及び車両制御システム | |
| JP2023047040A (ja) | マップ管理方法及びマップ管理システム | |
| JP2023046824A (ja) | 車両制御方法及び車両制御システム | |
| JP2023046927A (ja) | 車両用サスペンション制御装置、車両制御システム、及び車両用サスペンション制御方法 | |
| JP2023054955A (ja) | 車両用サスペンション制御装置 | |
| JP2024066838A (ja) | 運行管理システム | |
| US11762845B2 (en) | Storage of shard data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240409 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240514 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240805 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7544010 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |