JP7629026B2 - 車輪の回転周波数を決定する方法および装置 - Google Patents
車輪の回転周波数を決定する方法および装置 Download PDFInfo
- Publication number
- JP7629026B2 JP7629026B2 JP2022562723A JP2022562723A JP7629026B2 JP 7629026 B2 JP7629026 B2 JP 7629026B2 JP 2022562723 A JP2022562723 A JP 2022562723A JP 2022562723 A JP2022562723 A JP 2022562723A JP 7629026 B2 JP7629026 B2 JP 7629026B2
- Authority
- JP
- Japan
- Prior art keywords
- segments
- wheel
- sensor
- pulse
- frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/24476—Signal processing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/24471—Error correction
- G01D5/24495—Error correction using previous values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
- G01P21/02—Testing or calibrating of apparatus or devices covered by the preceding groups of speedometers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/481—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage of pulse signals
- G01P3/489—Digital circuits therefor
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Description


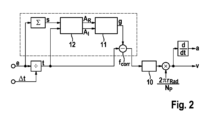
2 センサホイール
3 センサ素子
4 パルス発生器
5 エッジ
10 PT1フィルタ
I~IV セグメント
f1~f4 パルス周波数
Claims (6)
- 車輪に付属するセンサホイール(2)と前記センサホイール(2)に付属するセンサ素子(3)とを備えた回転数センサ(1)によって、前記車輪の回転周波数を決定する方法であって、前記センサホイール(2)はその円周にわたって均等に相互間隔をおいて配分されて配置されたパルス発生器(4)を有し、該パルス発生器のエッジ(5)が前記センサホイール(2)の回転周波数を決定するために前記センサ素子(3)によって検出される、方法において、偏心性によって引き起こされる回転周波数の変調を補償するために前記センサホイール(2)がセグメント(I~IV)に区分され、各々の前記セグメント(I~IV)において検出された信号パルスのパルス周波数(f1~f4)が平均化され、平均化されたパルス周波数(f1~f4)に依存して回転周波数を修正するための変調パラメータ(AR,AI)が決定され、
互いに直径上で向かい合うセグメント(I,III;II,IV)の平均化されたパルス周波数から偏心性のないパルス周波数(f1~f4)が判定され、
隣接するセグメント(I,II,III,IV)の平均化されたパルス周波数から偏心性を含むパルス周波数が判定され、
平均化された偏心性を含むパルス周波数と偏心性のないパルス周波数との比率から前記変調パラメータ(AR,AI)が決定されることを特徴とする方法。 - それぞれの前記セグメント(I~IV)のパルス周波数(f1~f4)を平均化するために、それぞれの前記セグメント(I~IV)について設定可能な時間帯にわたって、または前記センサホイールの設定された回転数にわたって、パルス周波数(f1~f4)が複数回検出されてから平均化されることを特徴とする、請求項1に記載の方法。
- 前記センサホイール(2)が等しい大きさの、または異なる大きさのセグメント(I~IV)に区分されることを特徴とする、請求項1または2に記載の方法。
- 前記センサホイール(2)が少なくとも3つのセグメント(I~IV)に区分されることを特徴とする、請求項1から3までのいずれか1項に記載の方法。
- 前記変調パラメータ(AR,AI)は前記センサホイールの偏心性の値および位相位置を記述することを特徴とする、請求項1から4までのいずれか1項に記載の方法。
- 請求項1から5までのいずれか1項に記載の方法を実施するためにセットアップされた制御装置を有することを特徴とする自動車の車輪の回転周波数を決定する装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020204974.2A DE102020204974A1 (de) | 2020-04-20 | 2020-04-20 | Verfahren und Vorrichtung zum Bestimmen einer Drehfrequenz eines Rads |
| DE102020204974.2 | 2020-04-20 | ||
| PCT/EP2021/059208 WO2021213812A1 (de) | 2020-04-20 | 2021-04-08 | Verfahren und vorrichtung zum bestimmen einer drehfrequenz eines rads |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023521241A JP2023521241A (ja) | 2023-05-23 |
| JP7629026B2 true JP7629026B2 (ja) | 2025-02-12 |
Family
ID=75539295
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022562723A Active JP7629026B2 (ja) | 2020-04-20 | 2021-04-08 | 車輪の回転周波数を決定する方法および装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240319226A1 (ja) |
| JP (1) | JP7629026B2 (ja) |
| CN (1) | CN115362373A (ja) |
| DE (1) | DE102020204974A1 (ja) |
| WO (1) | WO2021213812A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150101890A1 (en) | 2012-06-04 | 2015-04-16 | Otis Elevator Company | Encoder Eccentricity Correction For Elevator Systems |
| JP2016536588A (ja) | 2013-11-11 | 2016-11-24 | ゼネラル・エレクトリック・カンパニイ | ロータ速度の測定における誤差を低減する方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0721929B2 (ja) * | 1988-12-09 | 1995-03-08 | インターナショナル・ビジネス・マシーンズ・コーポレーション | パルス発生装置およびディスクのセクタ境界信号発生装置 |
| JPH06261579A (ja) * | 1993-03-10 | 1994-09-16 | Hitachi Ltd | 直流モータの速度制御装置 |
| DE19814732B4 (de) * | 1998-04-02 | 2013-02-28 | Robert Bosch Gmbh | Drehzahlerfassungsverfahren, insbesondere zur Verbrennungsaussetzererkennung |
| DE10148093A1 (de) * | 2001-09-28 | 2003-04-17 | Bayerische Motoren Werke Ag | Radkontrollsystem |
| JP5625293B2 (ja) * | 2009-09-14 | 2014-11-19 | ソニー株式会社 | 速度算出装置、速度算出方法及びナビゲーション装置 |
| ITUB20155838A1 (it) * | 2015-11-24 | 2017-05-24 | E Novia S R L | Dispositivo per la determinazione di una grandezza cinematica di una bicicletta e della cadenza di pedalata esercitata sui pedali di detta bicicletta |
| JP6953621B2 (ja) * | 2018-03-28 | 2021-10-27 | 新電元工業株式会社 | 駆動装置、駆動方法、駆動プログラムおよび電動車両 |
| DE102018221713A1 (de) | 2018-12-13 | 2020-06-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen einer Drehfrequenz eines Rads |
-
2020
- 2020-04-20 DE DE102020204974.2A patent/DE102020204974A1/de active Pending
-
2021
- 2021-04-08 JP JP2022562723A patent/JP7629026B2/ja active Active
- 2021-04-08 CN CN202180029491.0A patent/CN115362373A/zh active Pending
- 2021-04-08 WO PCT/EP2021/059208 patent/WO2021213812A1/de not_active Ceased
- 2021-04-08 US US17/917,484 patent/US20240319226A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150101890A1 (en) | 2012-06-04 | 2015-04-16 | Otis Elevator Company | Encoder Eccentricity Correction For Elevator Systems |
| JP2016536588A (ja) | 2013-11-11 | 2016-11-24 | ゼネラル・エレクトリック・カンパニイ | ロータ速度の測定における誤差を低減する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102020204974A1 (de) | 2021-10-21 |
| JP2023521241A (ja) | 2023-05-23 |
| US20240319226A1 (en) | 2024-09-26 |
| CN115362373A (zh) | 2022-11-18 |
| WO2021213812A1 (de) | 2021-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9664587B2 (en) | Method and device for balancing CT gantry | |
| EP3019832A2 (en) | Rotary encoder | |
| JPH06160413A (ja) | 部材の回転方向を決定する方法 | |
| JP7629026B2 (ja) | 車輪の回転周波数を決定する方法および装置 | |
| JPH04335111A (ja) | 磁気抵抗形回転検出器 | |
| US4787255A (en) | Torquemeter | |
| JP6709863B2 (ja) | 角度検出装置 | |
| CN111256620B (zh) | 旋转装置 | |
| CN108139427A (zh) | 用于确定经修正的转速信号的方法以及电动机装置 | |
| JP7147066B2 (ja) | 車輪の回転周波数を特定する方法及び装置 | |
| JP4637176B2 (ja) | エンジン位置を検出するための装置および方法 | |
| US20240167855A1 (en) | Method for adapting to the tolerances of a system comprising a position sensor and a rotating target | |
| JP2003057260A (ja) | 回転速度検出装置 | |
| JP7209877B2 (ja) | 角度検出装置 | |
| JPH0733163Y2 (ja) | 回転位相検出器付き速度検出装置 | |
| JPS6093327A (ja) | トルク検出器 | |
| JPH0854205A (ja) | 回転電機の回転位置検出装置 | |
| CN115781378A (zh) | 一种在线检测数控机床主轴动平衡及数字化调平的方法 | |
| JP6442316B2 (ja) | 車輪速回転変動パターン抽出装置およびその基準パターン設定方法 | |
| JP2025087650A (ja) | 回転数及び/又は回転数から導出される運動量を特定するための方法、コンピュータプログラム製品、コンピュータ装置 | |
| JP2024157111A (ja) | 車輪用軸受装置 | |
| Sharp et al. | On the measurement of variations in the spin velocity of a wheel | |
| JPS61259132A (ja) | 回転軸のトルク測定方法及び装置 | |
| CN118376393A (zh) | 一种应用于叶尖定时测量的主键相识别装置及方法 | |
| JPH0254315A (ja) | トルク制御式回転電動機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221209 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240105 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240315 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240705 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240913 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7629026 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |