JP7561550B2 - 列車定時到着支援装置 - Google Patents
列車定時到着支援装置 Download PDFInfo
- Publication number
- JP7561550B2 JP7561550B2 JP2020152677A JP2020152677A JP7561550B2 JP 7561550 B2 JP7561550 B2 JP 7561550B2 JP 2020152677 A JP2020152677 A JP 2020152677A JP 2020152677 A JP2020152677 A JP 2020152677A JP 7561550 B2 JP7561550 B2 JP 7561550B2
- Authority
- JP
- Japan
- Prior art keywords
- deceleration pattern
- train
- deceleration
- stop
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Description
[列車定時到着支援装置1の構成]
図1は、実施例1に係る列車定時到着支援装置1の概略構成図である。列車定時到着支援装置1は、列車に搭載されており、その列車が停止目標位置に対して定時に到着するように走行支援を行う装置である。停止目標位置は、列車が走行中の路線に設けられた次駅であり、列車の速度を0とする位置である。
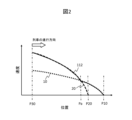
減速パターン生成部102は、減速度が異なる複数の減速パターンとして、固定減速パターンと、少なくとも1つの調整減速パターンとから停止目標位置までの各位置で速度が高い方の減速パターンを優先して組み合わせて、駅停車減速パターン112を生成する。
[列車定時到着支援装置1の構成]
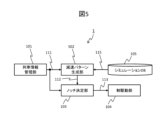
図5は、実施例2に係る列車定時到着支援装置1の概略構成図である。列車定時到着支援装置1は、列車情報管理部101、減速パターン生成部502、ノッチ決定部103、制駆動部104、及び、シミュレーションデータベース105を備える。減速パターン生成部502以外の各部は、実施例1に係る列車定時到着支援装置1と同様に構成されているため、説明を省略する。
図6は、実施例2に係る減速パターン生成部502による駅停車減速パターン112の生成処理を示すフローチャートである。図6に示す生成処理は、減速パターン生成部502により列車の制御周期ごとに繰り返し実行される。
[列車定時到着支援装置1の構成]
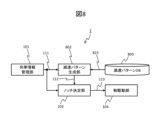
図8は、実施例3に係る列車定時到着支援装置1の概略構成図である。列車定時到着支援装置1は、列車情報管理部101、減速パターン生成部802、ノッチ決定部103、制駆動部104、及び、減速パターンデータベース805を備える。減速パターン生成部802及び減速パターンデータベース805以外の各部は、実施例1に係る列車定時到着支援装置1と同様に構成されているため、説明を省略する。
図10は、実施例3に係る減速パターン生成部802による駅停車減速パターン112の生成処理を示すフローチャートである。
[列車定時到着支援装置1の構成]
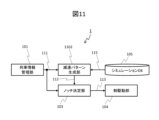
図11は、実施例4に係る列車定時到着支援装置1の概略構成図である。列車定時到着支援装置1は、列車情報管理部101、減速パターン生成部1102、ノッチ決定部103、制駆動部104、及び、シミュレーションデータベース105を備える。減速パターン生成部1102以外の各部は、実施例1に係る列車定時到着支援装置1と同様に構成されているため、説明を省略する。
減速パターン生成部1102は、減速度が異なる複数の減速パターンとして、固定減速パターン10と、複数の調整減速パターン(図12に例示する調整減速パターン21、22)とから停止目標位置P10までの各位置において速度が高い方の減速パターンを優先して組み合わせて、駅停車減速パターン112を生成する。
以上、本発明の実施の形態について説明したが、本発明は、上記の実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変形が可能である。例えば、本発明は、上記の実施の形態で説明した全ての構成を備えるものに限定されず、その構成の一部を削除したものも含まれる。また、特定の実施例に係る構成の一部を、他の実施例に係る構成に追加又は置換することが可能である。
101…列車情報管理部
102、502、802、1102…減速パターン生成部
103…ノッチ決定部(列車制御部)
104…制駆動部
105…シミュレーションデータベース
805…減速パターンデータベース(記憶部)
Claims (4)
- 所定の減速度に従って停止目標位置に列車を停止させる固定減速パターンと、前記所定の減速度よりも大きな減速度に従って前記停止目標位置より前記列車側に近い基準位置に前記列車を停止させる調整減速パターンとから、前記停止目標位置までの各位置で速度が高い方の減速パターンを優先して組み合わせて駅停車減速パターンを生成する減速パターン生成部と、
前記減速パターン生成部から出力された前記駅停車減速パターンに追従して前記列車を制御する列車制御部と
を備え、
前記減速パターン生成部は、
前記固定減速パターンと、現時点における前記列車の走行位置及び速度を起点とする前記調整減速パターンとから、前記現時点以降の前記駅停車減速パターンを生成し、当該駅停車減速パターンに追従して前記列車が前記現時点の走行位置から前記停止目標位置に停止するまでの予測走行時分を算出し、当該予測走行時分と前記停止目標位置に対する到着目標時分までに残された残走行時分とが所定の定時到着条件を満たすか否かを判定し、前記定時到着条件を満たす場合には、生成した前記駅停車減速パターンを前記列車制御部へ出力する
ことを特徴とする列車定時到着支援装置。 - 請求項1に記載の列車定時到着支援装置であって、
前記減速パターン生成部は、
前記調整減速パターンとして、前記減速度が異なる複数の前記調整減速パターンを組み合わせる場合、
前記列車が現時点で前記複数の調整減速パターンのいずれにも追従していないときには、前記固定減速パターンと、当該現時点における前記列車の走行位置及び速度を起点とし前記減速度の最も高い前記調整減速パターンと、当該調整減速パターンの次に前記減速度が順に高く前記基準位置が順に前記停止目標位置に近い前記調整減速パターンとから、当該現時点以降の前記駅停車減速パターンを生成し、
前記列車が現時点で前記複数の調整減速パターンのいずれかに追従しているときには、前記固定減速パターンと、当該現時点における前記列車の走行位置及び速度を起点とし当該追従している調整減速パターンに対して前記減速度が次に高く前記基準位置が前記停止目標位置により近い前記調整減速パターンとから、当該現時点以降の前記駅停車減速パターンを生成する
ことを特徴とする列車定時到着支援装置。 - 請求項1又は請求項2に記載の列車定時到着支援装置であって、
前記減速パターン生成部は、
前記列車の制御周期の到来時点を前記現時点として、前記駅停車減速パターンに基づき前記判定をする処理を前記制御周期ごとに実行する
ことを特徴とする列車定時到着支援装置。 - 所定の減速度に従って停止目標位置に列車を停止させる固定減速パターンと、前記所定の減速度よりも大きな減速度に従って前記停止目標位置より前記列車側に近い基準位置に前記列車を停止させる調整減速パターンとから、前記停止目標位置までの各位置で速度が高い方の減速パターンを優先して組み合わせて駅停車減速パターンを生成する減速パターン生成部と、
前記減速パターン生成部から出力された前記駅停車減速パターンに追従して前記列車を制御する列車制御部と、
前記停止目標位置よりも前記列車側に位置する減速パターン生成位置を前記列車が通過した時点での当該列車の速度と前記停止目標位置に対する到着目標時分までに残された残走行時分との各組み合わせから前記基準位置が設定された第1のテーブルおよび前記基準位置ごとに前記列車の走行位置に応じて前記列車の速度が設定された第2のテーブルを記憶する記憶部と
を備え、
前記減速パターン生成部は、
前記列車が前記減速パターン生成位置を通過した時点における前記列車の速度と前記残走行時分とに応じて前記第1のテーブルを参照して前記基準位置を取得し、取得した当該基準位置に基づいて前記第2のテーブルを参照して前記列車の走行位置に応じた前記列車の速度を取得して前記駅停車減速パターンを生成する
ことを特徴とする列車定時到着支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020152677A JP7561550B2 (ja) | 2020-09-11 | 2020-09-11 | 列車定時到着支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020152677A JP7561550B2 (ja) | 2020-09-11 | 2020-09-11 | 列車定時到着支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022046993A JP2022046993A (ja) | 2022-03-24 |
| JP7561550B2 true JP7561550B2 (ja) | 2024-10-04 |
Family
ID=80780109
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020152677A Active JP7561550B2 (ja) | 2020-09-11 | 2020-09-11 | 列車定時到着支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7561550B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005280542A (ja) | 2004-03-30 | 2005-10-13 | Nippon Signal Co Ltd:The | Atc/o装置 |
| JP2006006030A (ja) | 2004-06-17 | 2006-01-05 | Toshiba Corp | 運転パターン作成装置、車両速度制御装置および車両運転支援装置。 |
| JP2011087364A (ja) | 2009-10-14 | 2011-04-28 | Hitachi Ltd | 自動列車運転装置,定位置停止装置 |
| JP2017063556A (ja) | 2015-09-25 | 2017-03-30 | 株式会社日立製作所 | 走行パタン作成装置及び走行パタン作成装置と自動列車運転装置を備えた自動列車運転システム並びに走行パタン作成装置と運転支援装置を備えた運転支援システム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2690220B2 (ja) * | 1991-02-28 | 1997-12-10 | 三菱電機株式会社 | 列車定位置停止制御装置 |
-
2020
- 2020-09-11 JP JP2020152677A patent/JP7561550B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005280542A (ja) | 2004-03-30 | 2005-10-13 | Nippon Signal Co Ltd:The | Atc/o装置 |
| JP2006006030A (ja) | 2004-06-17 | 2006-01-05 | Toshiba Corp | 運転パターン作成装置、車両速度制御装置および車両運転支援装置。 |
| JP2011087364A (ja) | 2009-10-14 | 2011-04-28 | Hitachi Ltd | 自動列車運転装置,定位置停止装置 |
| JP2017063556A (ja) | 2015-09-25 | 2017-03-30 | 株式会社日立製作所 | 走行パタン作成装置及び走行パタン作成装置と自動列車運転装置を備えた自動列車運転システム並びに走行パタン作成装置と運転支援装置を備えた運転支援システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022046993A (ja) | 2022-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI640441B (zh) | Train control device, method and program | |
| Xun et al. | Cooperative control of high-speed trains for headway regulation: A self-triggered model predictive control based approach | |
| US9205851B2 (en) | Speed profile creation device and automatic train operation apparatus | |
| US8374739B2 (en) | Train control device having a target speed calculation function | |
| US5440489A (en) | Regulating a railway vehicle | |
| CN113320576B (zh) | 虚拟编组列车编队的停车控制方法、装置及存储介质 | |
| JP2011205738A (ja) | 自動列車運転装置 | |
| CN114802362A (zh) | 时分控制的列车节能运行方法和装置 | |
| JP2011121417A (ja) | 走行制御システム、制御プログラム、記録媒体 | |
| JP5805051B2 (ja) | 列車自動制御装置 | |
| JP7433933B2 (ja) | 列車制御装置、及び列車制御方法 | |
| JPH06284519A (ja) | 列車走行制御装置 | |
| WO2016114032A1 (ja) | 自動列車運転装置、自動列車制御方法及びプログラム | |
| JP7561550B2 (ja) | 列車定時到着支援装置 | |
| JPH0976914A (ja) | 列車運行制御方法及び装置 | |
| CN112124363A (zh) | 列车精确停车的控制方法、ato、vobc及列车 | |
| JP6712959B2 (ja) | 走行制御装置、走行制御方法、および走行制御システム | |
| JPH0799708A (ja) | 列車自動運転装置 | |
| KR20220126207A (ko) | 열차 제어 장치 및 제어 방법 | |
| CN117465436B (zh) | 一种车辆巡航控制方法及系统 | |
| JP2006074876A (ja) | 車両の定位置停止自動制御装置 | |
| CN119271920B (zh) | 一种列车进站停车阶段目标速度曲线规划方法 | |
| JP7786193B2 (ja) | 制御装置 | |
| JP7466494B2 (ja) | 列車制御システム及び列車制御装置 | |
| JP2020196369A (ja) | 列車制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230303 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240305 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20240507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240924 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7561550 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |