JP7499720B2 - 監視装置および監視衛星 - Google Patents
監視装置および監視衛星 Download PDFInfo
- Publication number
- JP7499720B2 JP7499720B2 JP2021037820A JP2021037820A JP7499720B2 JP 7499720 B2 JP7499720 B2 JP 7499720B2 JP 2021037820 A JP2021037820 A JP 2021037820A JP 2021037820 A JP2021037820 A JP 2021037820A JP 7499720 B2 JP7499720 B2 JP 7499720B2
- Authority
- JP
- Japan
- Prior art keywords
- opening
- monitoring
- satellite
- sunlight
- monitoring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Navigation (AREA)
- Photometry And Measurement Of Optical Pulse Characteristics (AREA)
Description
赤外監視装置によって夜間監視を実施する場合、直径3.6メートル超の大口径の開口部に太陽光が入射して温度が上昇することが障害になる。
赤道上空軌道に投入される人工衛星に搭載される監視装置であり、
前記赤道上空軌道への前記人工衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記人工衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバーを備える。
監視衛星100について、図1から図5に基づいて説明する。
図1に基づいて、監視衛星100の構成を説明する。
監視衛星100は、地球を監視するための人工衛星である。
監視衛星100は、監視装置110と推進装置121と姿勢制御装置122と通信装置123と衛星制御装置124と電源装置125などを備える。
監視装置110は、駆動ミラーなどを利用したポインティング機構を備える。ポインティング機構は、監視装置110の視線方向を監視対象へ向けるための機構である。
監視装置110は、監視データを生成する。監視データは、監視対象が映った画像に相当するデータである。
姿勢制御装置122は、各姿勢要素を所望の方向に変化させる。もしくは、姿勢制御装置122は、各姿勢要素を所望の方向に維持する。姿勢制御装置122は、姿勢センサとアクチュエータとコントローラとを備える。姿勢センサは、ジャイロスコープ、地球センサ、太陽センサ、スター・トラッカ、スラスタおよび磁気センサなどである。アクチュエータは、姿勢制御スラスタ、モーメンタムホイール、リアクションホイールおよびコントロール・モーメント・ジャイロ等である。コントローラは、姿勢センサの計測データまたは地上システムからの各種コマンドにしたがって、アクチュエータを制御する。
処理回路は、専用のハードウェアであってもよいし、メモリに格納されるプログラムを実行するプロセッサであってもよい。
処理回路において、一部の機能が専用のハードウェアで実現されて、残りの機能がソフトウェアまたはファームウェアで実現されてもよい。つまり、処理回路は、ハードウェア、ソフトウェア、ファームウェアまたはこれらの組み合わせで実現することができる。
専用のハードウェアは、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGAまたはこれらの組み合わせである。
ASICは、Application Specific Integrated Circuitの略称である。
FPGAは、Field Programmable Gate Arrayの略称である。
指向変更機構は、監視装置110の指向方向を変更するための機構である。
具体的には、監視衛星100の姿勢制御装置122および監視装置110のポインティング機構が指向変更機構として利用される。
図2に示すように、監視装置110は、円柱状の本体111を備える。
本体111は、監視のための開口部112を有する。
開口部112は、開口径Dを有する。
開口カバー113の状態は変化する。開口カバー113が折り畳まれた状態を「収納状態」と称する。開口カバー113が展開された状態を「展開状態」と称する。
収納状態において、開口カバー113は開口部112を覆う。これにより、開口部112が保護される。また、開口部112が遮光される。
展開状態において、開口部112は、光軸方向における開口部112からの長さLが開口径Dの2倍以上になる。
カバー制御機構は、開口カバー113を収納状態から展開状態に変更することができる。また、カバー制御機構は、開口カバー113を展開状態から収納状態に変更することができる。
開口カバー113が2枚以上の板で構成される場合、カバー制御機構は、各連結部分を屈伸させることによって、開口カバー113の状態を変化させる。
開口カバー113がフレームに取り付けられた膜で構成される場合、カバー制御機構は、フレームを屈伸させることによって、開口カバー113の状態を変化させる。
回動装置114は開口部112の縁に設けられ、開口カバー113は回動装置114に取り付けられる。
開口カバー113が収納状態で、監視装置110が監視衛星100に搭載される。監視衛星100はロケットに搭載される。
収納状態の開口カバー113は、監視装置110の開口部112を覆って開口部112を保護する。
赤道上空軌道は赤道上空の軌道である。具体的な赤道上空軌道は静止軌道である。
そして、開口カバー113が監視装置110の開口部112を太陽光から遮蔽する。
これにより、監視装置110の開口部112への太陽光の入射が回避され、監視装置110による監視の精度が向上する。具体的には、赤外検知方式の監視装置110によって計測される温度の精度が向上する。
監視装置110は、地心方向を指向して対象地域を監視する。地心方向は、地球の中心への方向を意味する。
対象地域は、監視の対象となる地域である。対象地域の具体例は日本である。
遮蔽時間帯は、対象地域における標準時で当日の1時46分から当日の22時14分までの時間帯である。
遮蔽時間帯には、地球102または開口カバー113によって、開口部112が太陽光から遮蔽される。
そのため、監視装置110は、遮蔽時間帯に対象地域を監視する。
非遮蔽時間帯は、対象地域における標準時で当日の22時14分から翌日の1時46分までの時間帯である。
非遮蔽時間帯には、地球102および開口カバー113によって、開口部112が太陽光から遮蔽されない。
そのため、監視衛星100の指向変更機構が、非遮蔽時間帯に監視装置110の指向方向を地心方向からずらす。または、監視衛星100のカバー制御機構が、非遮蔽時間帯に開口カバー113を動かして開口カバー113で開口部112を覆う。これにより、非遮蔽時間帯に開口部112が太陽光から遮蔽される。
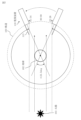
図4に基づいて、実施の形態1の特徴および効果を説明する。
監視衛星100の図示は省略している。
矢印付きの直線状の破線は、太陽101が放つ光(太陽光)を表している。太陽光の一部は地球102によって遮蔽される。
軌道103は、監視衛星100の軌道、すなわち赤道上空軌道を表している。監視衛星100は軌道103を周回する。
軌道103の各地点には、監視衛星100が通過する時刻を対象地域における標準時で記している。
地球102の中央の黒丸は、北極を表している。
「r」は、地球102の半径を意味する。
「R」は、軌道103の軌道半径を意味する。
「θ」および「φ」は、監視装置110の光軸に対する太陽光の入射角を意味する。
「T」は、監視衛星100が入射角φに相当する角度を移動するために要する時間を意味する。
監視衛星100が軌道103から監視装置110によって夜間監視を行う場合、開口カバー113が無いと、太陽光が入射して開口部112の温度が上昇してしまう。
しかし、監視装置110は開口カバー113を備える。そして、開口カバー113が、打ち上げ時に開口部112の保護カバーとして機能すると共に、監視時に開口部112を太陽光から遮蔽する遮蔽板として機能する。これにより、開口部112の温度が一定に保たれ、監視精度の劣化が回避される。
長さLが開口部112の開口径Dに対してD/tanθ以上であれば、監視装置110が地心方向を指向した状態において、開口カバー113の遮蔽効果によって開口部112への太陽光の入射が回避される。そのため、夜間監視が可能となる。
開口カバー113は折り畳み構造で収納されるため、開口カバー113の展開は容易である。
しかし、監視装置110は、板状の構造または膜状の構造を有する開口カバー113を備える。そのため、開口カバー113の遮蔽効果により、開口部112への太陽光の入射が遮断される。また、開口カバー113が太陽光によって熱せられても、開口カバー113の熱は放射冷却によって深宇宙へ排熱される。そのため、監視装置110の本体111に対する開口カバー113の悪影響はない。
そこで、監視装置110が回動装置114を備え、回動装置114が展開状態の開口カバー113の位置を監視装置110の光軸回りに移動させる。
これにより、季節および時間帯の変化によって太陽光の入射角が変化しても、展開状態の開口カバー113が開口部112を太陽光から遮蔽できる。
地球102の自転と同期する静止軌道では、経度方向の360度が24時間に相当する。そして、開口カバー113が開口部112を遮蔽することが可能な太陽光の入射角θが26.5度以上であり、26.5度は1時間46分に相当する。
そのため、当日の1時46分から当日の22時14分までの約20時間半、監視装置110は、太陽光の入射による悪影響を受けずに、昼夜の監視が可能である。
展開時の開口カバー113の長さLが開口部112の開口径Dの2.3倍以上である形態について、主に実施の形態1と異なる点を図6および図7に基づいて説明する。
監視衛星100の構成は、実施の形態1における構成と同じである。
但し、展開時の開口カバー113の長さLは、開口部112の開口径Dの2.3倍以上である。
監視衛星100の動作は、実施の形態1における動作と同じである。但し、監視装置110は以下のように動作する。
監視装置110は、遮蔽時間帯に対象地域を監視する。
遮蔽時間帯は、対象地域における標準時で当日の1時34分から当日の22時26分までの時間帯である。
遮蔽時間帯には、地球102または開口カバー113によって、開口部112が太陽光から遮蔽される。
そのため、監視装置110は、遮蔽時間帯に対象地域を監視する。
非遮蔽時間帯は、対象地域における標準時で当日の22時26分から翌日の1時34分までの時間帯である。
非遮蔽時間帯には、地球102および開口カバー113によって、開口部112が太陽光から遮蔽されない。
そのため、監視衛星100の指向変更機構が、非遮蔽時間帯に監視装置110の指向方向を地心方向からずらす。または、監視衛星100のカバー制御機構が、非遮蔽時間帯に開口カバー113を動かして開口カバー113で開口部112を覆う。これにより、非遮蔽時間帯に開口部112が太陽光から遮蔽される。
図6に基づいて、実施の形態2の特徴および効果を説明する。
二点鎖線は、赤道上空軌道の軌道面(104E,104S,104W)を表している。
軌道面104Eは、対象地域の時期が春分または秋分である場合の軌道面である。
軌道面104Sは、対象地域の時期が夏至である場合の軌道面である。
軌道面104Wは、対象地域の時期が冬至である場合の軌道面である。
展開時の開口カバー113の長さLが開口部112の開口径Dの2.3倍である場合、太陽光の入射角θが23.5度以上であれば、開口カバー113は開口部112を太陽光から遮蔽できる。
地球102の自転と同期する静止軌道では、経度方向の360度が24時間に相当する。そして、開口カバー113が開口部112を遮蔽することが可能な太陽光の入射角θが23.5度以上であり、23.5度は1時間34分に相当する。
そのため、当日の1時34分から当日の22時26分までの約21時間、監視装置110は、太陽光の入射による悪影響を受けずに、昼夜の監視が可能である。
赤道上空軌道の半径が16000キロメートル以下である形態について、主に実施の形態1および実施の形態2と異なる点を図8に基づいて説明する。
監視衛星100の構成は、実施の形態1における構成と同じである。
監視装置110の構成は、実施の形態2における構成と同じである。但し、監視装置110の構成が実施の形態1における構成と同じであっても構わない。
監視衛星100および監視装置110の動作は、実施の形態1または実施の形態2における動作と同じである。
但し、赤道上空軌道の半径は16000キロメートル以下である。
図8に基づいて、実施の形態3の特徴および効果を説明する。
開口カバー113が開口部112を太陽光から遮蔽することが可能な太陽光の入射角θは23.5度以上である。ここで、23.5度を「θ0」と記す。
地球102の半径rは6371キロメートルである。
軌道103の高度すなわち軌道半径Rが16000キロメートル(=6371km×(1/sinθ0))であれば、入射角θが23.5度より小さい太陽光は、緯度方向と経度方向とのいずれにおいても、地球102によって遮蔽される。
そのため、夜間においても、太陽光が開口部112に入射することなく、監視装置110は監視を行える。
赤道上空軌道が楕円軌道である形態について、主に実施の形態1から実施の形態3と異なる点を図9に基づいて説明する。
監視衛星100の構成は、実施の形態1における構成と同じである。
監視装置110の構成は、実施の形態2における構成と同じである。但し、監視装置110の構成が実施の形態1における構成と同じであっても構わない。
監視衛星100は、赤道上空軌道を周回する。
赤道上空軌道は、楕円軌道である。
赤道上空軌道の近地点は、対象地域の夏至と対象地域の冬至とのそれぞれで太陽から見て地球の裏側に位置する。この位置を「規定位置」と称する。
赤道上空軌道の軌道高度は、近地点において16000キロメートル以下である。
監視衛星100の速度が増速すると、監視衛星100の高度が上昇する。そして、監視衛星100の高度が上昇すると、監視衛星100の対地速度が減速する。その結果、監視衛星100の位置が対象地域に対して相対的に西側に移動する。
監視衛星100の飛行速度が減速すると、監視衛星100の高度が下降する。そして、監視衛星100の高度が下降すると、監視衛星100の対地速度が増速する。その結果、監視衛星100の位置が対象地域に対して相対的に東側に移動する。
監視衛星100が赤道上空を横切る地点(分点)において推進装置121が軌道面と直交する方向へ推力を発生させれば、効果的に軌道傾斜角を微調整することができる。
図9に基づいて、実施の形態4の特徴および効果を説明する。
軌道103は楕円軌道である。
楕円軌道において、通常、楕円の長径は地球102の公転と同期せずに面内で回転する。そのため、夏至と冬至において、楕円軌道の軌道高度が特殊な場合に限り、近地点が地球102の裏側に位置することとなる。ただし、この条件を満足すれば、夜間監視において、地球102または開口カバー113が太陽光を遮蔽する。これにより、監視装置110は、太陽光の入射による悪影響を受けずに夜間監視を行うことができる。
夏至と冬至に近地点が地球102の裏側に来るように推進装置121が動作すれば、夜間監視において、地球102または開口カバー113が太陽光を遮蔽する。これにより、監視装置110は、太陽光の入射による悪影響を受けずに夜間監視を行うことができる。
赤道上空軌道が静止軌道以外の円軌道である形態について、主に実施の形態1から実施の形態4と異なる点を図10およびから図11に基づいて説明する。
監視衛星100の構成は、実施の形態1における構成と同じである。
監視装置110の構成は、実施の形態2における構成と同じである。但し、監視装置110の構成が実施の形態1における構成と同じであっても構わない。
監視衛星100および監視装置110の動作は、実施の形態1または実施の形態2における動作と同じである。
但し、赤道上空軌道は、静止軌道以外の円軌道である。
対象地域における標準時の23時から太陽光が開口部112に入射する時刻までの間に、指向変更機構は、監視装置110の指向方向を地心方向から東側に動かす。
地球が開口部112を太陽光から遮蔽する時刻の後に、指向変更機構は、監視装置110の指向方向を西側に動かす。
監視装置110の指向方向が開口部112に太陽光が入射しない角度まで移動した後に、指向変更機構は、監視装置110の指向方向を地心方向に戻す。
図10に基づいて、実施の形態5の特徴および効果を説明する。
軌道103の高度は、約20000キロメートルである。監視衛星100は、軌道103を1日に2周回する。1周回あたりの時間は12時間である。地上解像度(GSD)は、おおよそ2.8メートルから10メートルの範囲内である。超解像は約1.7メートル以上である。
監視装置110は、9時から15時までの日中6時間の連続監視が可能である。
夜間において、開口部112への太陽光の入射が始まる前に監視装置110の指向方向(視野方向)を東側に移動することで、開口部112への太陽光の入射を回避することができる。また、地球102の遮蔽が始まってから監視装置110の指向方向を西側に移動することで、開口部112への太陽光の入射を回避することができる。なお、地心方向よりも東側に位置する監視対象の監視データを取得することも可能である。
軌道103の高度は、約14000キロメートルである。監視衛星100は、軌道103を1日に3周回する。1周回あたりの時間は8時間である。地上解像度(GSD)は、おおよそ1.9メートルから7メートルの範囲内である。超解像は約1.2メートル以上である。
監視装置110は、10時から14時までの日中4時間の連続監視が可能である。
監視装置110は、赤外検知方式で温度測定ができる。
監視衛星100が軌道103から監視装置110によって夜間監視を行う場合、開口カバー113が無いと、太陽光が入射して開口部112の温度が上昇してしまう。
さらに、地球の自転軸が傾斜しているため、赤道上空軌道を飛翔する監視衛星100の監視装置110に対する太陽光の入射角度は、春分と秋分を基準として、夏至と冬至に23.5度変化する。
そこで、開口カバー113は、打ち上げ時に開口部112の保護カバーとして機能すると共に、監視時に開口部112を太陽光から遮蔽する遮蔽板として機能する。これにより、開口部112の温度が一定に保たれ、監視精度の劣化が回避される。
しかし、監視装置110は、板状の構造または膜状の構造を有する開口カバー113を備える。そのため、開口カバー113の遮蔽効果により、開口部112への太陽光の入射が遮断される。また、開口カバー113が太陽光によって熱せられても、開口カバー113の熱は放射冷却によって深宇宙へ排熱される。そのため、監視装置110の本体111に対する開口カバー113の悪影響はない。
光軸に対する入射角がφ以上である太陽光を遮蔽すれば、真夜中0時前後のT時間(T=φ/15)を除いて、開口部112への太陽光の侵入を回避できる。
真夜中0時ごろには、地球によって太陽光が遮蔽される。
このため、地球の半径rに対する軌道半径R(=r/φ)と、時間T(=φ/15)と、を境界条件にして、夜間の連続監視を実現することができる。つまり、軌道半径Rと時間Tの関係次第で、開口カバー113の遮蔽効果と地球の遮蔽効果を両用して夜間の連続監視を実現することができる。
各実施の形態は、好ましい形態の例示であり、本開示の技術的範囲を制限することを意図するものではない。各実施の形態は、部分的に実施してもよいし、他の形態と組み合わせて実施してもよい。
Claims (21)
- 赤道上空軌道に投入される人工衛星に搭載される監視装置であり、
前記赤道上空軌道への前記人工衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記人工衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバー
を備え、
夜間において、前記開口部への太陽光の入射が始まる前に前記監視装置が指向方向を東側に移動して前記開口部への太陽光の入射を回避し、地球の遮蔽が始まってから前記監視装置が指向方向を西側に移動して前記開口部への太陽光の入射を回避することによって、前記開口カバーの遮蔽効果と地球の遮蔽効果を両用して夜間の連続監視を行う
監視装置。 - 赤道上空軌道に投入され静止軌道より低い軌道を周回する人工衛星に搭載される監視装置であり、
前記赤道上空軌道への前記人工衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記人工衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバー
を備え、
夜間において、前記開口部への太陽光の入射が始まる前に前記監視装置が指向方向を東側に移動して前記開口部への太陽光の入射を回避し、地球の遮蔽が始まってから前記監視装置が指向方向を西側に移動して前記開口部への太陽光の入射を回避する
監視装置。 - 前記開口カバーが、前記打ち上げ時に折り畳まれており、前記投入後に展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2倍以上または前記開口径の2.3倍以上になる
請求項1または請求項2に記載の監視装置。 - 前記開口カバーが、連結された2枚以上の板またはフレームに取り付けられた膜で構成される
請求項1から請求項3のいずれか1項に記載の監視装置。 - 展開後の前記開口カバーを前記開口部の縁に沿って光軸回りに動かす回動装置を備える請求項1から請求項4のいずれか1項に記載の監視装置。
- 赤道軌道上空の高度約9300キロメートルまで降下して赤道上空軌道に投入される人工衛星に搭載される監視装置であり、
前記赤道上空軌道への前記人工衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記人工衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバーと、
回動装置と、
を備え、
前記開口カバーが、連結された2枚以上の板またはフレームに取り付けられた膜で構成され、前記打ち上げ時に折り畳まれており、前記投入後に展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2倍以上または前記開口径の2.3倍以上になり、
前記回動装置が、展開後の前記開口カバーを前記開口部の縁に沿って光軸回りに動かすことにより、
前記監視装置の指向方向を東西にずらさなくても継続的な夜間監視を行うことを可能とする
監視装置。 - 監視装置が搭載され赤道上空軌道に投入される監視衛星であり、
前記監視装置が、前記赤道上空軌道への前記監視衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記監視衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバーを備え、
夜間において、前記開口部への太陽光の入射が始まる前に前記監視装置が指向方向を東側に移動して前記開口部への太陽光の入射を回避し、地球の遮蔽が始まってから前記監視装置が指向方向を西側に移動して前記開口部への太陽光の入射を回避することによって、前記開口カバーの遮蔽効果と地球の遮蔽効果を両用して夜間の連続監視を行う
監視衛星。 - 監視装置が搭載され静止軌道より低い赤道上空軌道に投入される監視衛星であり、
前記監視装置が、前記赤道上空軌道への前記監視衛星の投入のための打ち上げ時に監視用の開口部を覆い、前記赤道上空軌道への前記監視衛星の投入後に展開して前記開口部を太陽光から遮蔽する開口カバーを備え、
夜間において、前記開口部への太陽光の入射が始まる前に前記監視装置が指向方向を東側に移動して前記開口部への太陽光の入射を回避し、地球の遮蔽が始まってから前記監視装置が指向方向を西側に移動して前記開口部への太陽光の入射を回避する
監視衛星。 - 前記開口カバーが、前記打ち上げ時に折り畳まれており、前記投入後に展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2倍以上または前記開口部の開口径の2.3倍以上になる
請求項7または請求項8に記載の監視衛星。 - 前記開口カバーが、連結された2枚以上の板またはフレームに取り付けられた膜で構成される
請求項7から請求項9のいずれか1項に記載の監視衛星。 - 展開後の前記開口カバーを前記開口部の縁に沿って光軸回りに動かす回動装置を備える請求項7から請求項10のいずれか1項に記載の監視衛星。
- 前記監視衛星は、前記赤道上空軌道に投入された後に対象地域の上空を飛翔し、
前記開口カバーが、展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2倍以上になり、
前記監視装置は、前記開口カバーが展開された状態で、前記対象地域における標準時で1時46分から22時14分までの間に前記対象地域を監視する
請求項7から請求項11のいずれか1項に記載の監視衛星。 - 前記監視衛星は、前記監視装置の指向方向を変更する指向変更機構を備え、
前記指向変更機構が、前記標準時における22時14分から1時46分まで、前記監視装置の指向方向を地心方向からずらすことによって、前記開口部を太陽光から遮蔽する
請求項12に記載の監視衛星。 - 前記監視衛星は、前記開口カバーの状態を制御するカバー制御機構を備え、
前記カバー制御機構が、前記標準時における22時14分から1時46分まで、前記開口カバーで前記開口部を覆うことによって、前記開口部を太陽光から遮蔽する
請求項12に記載の監視衛星。 - 前記監視衛星は、赤道上空軌道に投入された後に対象地域の上空を飛翔し、
前記開口カバーが、展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2.3倍以上になり、
前記監視装置は、前記開口カバーが展開された状態で、前記対象地域における標準時で1時34分から22時26分までの間に前記対象地域を監視する
請求項7から請求項11のいずれか1項に記載の監視衛星。 - 前記監視衛星は、前記監視装置の指向方向を変更する指向変更機構を備え、
前記指向変更機構が、前記標準時における22時26分から1時34分まで、前記監視装置の指向方向を地心方向から変更することによって、前記開口部を太陽光から遮蔽する請求項15に記載の監視衛星。 - 前記監視衛星は、前記開口カバーの状態を制御するカバー制御機構を備え、
前記カバー制御機構が、前記標準時における22時26分から1時34分まで、前記開口カバーで前記開口部を覆うことによって、前記開口部を太陽光から遮蔽する
請求項15に記載の監視衛星。 - 前記赤道上空軌道の半径が16000キロメートル以下であり、
前記開口カバーが、展開によって光軸方向における前記開口部からの長さが前記開口部の開口径の2.3倍以上になる
請求項7から請求項11のいずれか1項に記載の監視衛星。 - 前記監視衛星は、赤道上空軌道に投入された後に対象地域の上空を飛翔し、
前記赤道上空軌道が、楕円軌道であり、
前記赤道上空軌道の近地点が、前記対象地域の夏至と前記対象地域の冬至とのそれぞれで太陽から見て地球の裏側に位置し、
前記赤道上空軌道の軌道高度が、前記近地点において16000キロメートル以下である
請求項7から請求項11のいずれか1項に記載の監視衛星。 - 前記監視衛星は、前記監視衛星の速度を調整する推進装置を備え、
前記推進装置が、前記監視衛星の速度を調整することによって、前記赤道上空軌道の前記近地点を前記夏至と前記冬至とのそれぞれに太陽から見て地球の裏側に位置させる
請求項19に記載の監視衛星。 - 前記監視衛星は、前記監視装置の指向方向を変更する指向変更機構を備え、対象地域の上空を飛翔し、
前記赤道上空軌道が、静止軌道以外の円軌道であり、
前記指向変更機構が、前記対象地域における標準時の23時から太陽光が前記開口部に入射する時刻までの間に前記指向方向を地心方向から東側に動かし、地球が前記開口部を太陽光から遮蔽する時刻の後に前記指向方向を西側に動かし、前記指向方向が前記開口部に太陽光が入射しない角度まで移動した後に前記指向方向を前記地心方向に戻す
請求項7から請求項11のいずれか1項に記載の監視衛星。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021037820A JP7499720B2 (ja) | 2021-03-09 | 2021-03-09 | 監視装置および監視衛星 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021037820A JP7499720B2 (ja) | 2021-03-09 | 2021-03-09 | 監視装置および監視衛星 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022138046A JP2022138046A (ja) | 2022-09-22 |
| JP7499720B2 true JP7499720B2 (ja) | 2024-06-14 |
Family
ID=83319596
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021037820A Active JP7499720B2 (ja) | 2021-03-09 | 2021-03-09 | 監視装置および監視衛星 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7499720B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011155267A (ja) | 2011-02-18 | 2011-08-11 | Taruno Kazuo | 超軽量高出力発電人工衛星 |
| US20180239948A1 (en) | 2014-11-18 | 2018-08-23 | Elwha Llc | Satellite with machine vision for disaster relief support |
| JP2019055776A (ja) | 2014-07-16 | 2019-04-11 | レイセオン カンパニー | 可動式サンシェードを備えた日射遮蔽システム |
| JP2019156204A (ja) | 2018-03-14 | 2019-09-19 | 日本電気株式会社 | 光学機器の開口カバーおよびその開放方法 |
| WO2020158000A1 (ja) | 2019-01-28 | 2020-08-06 | 三菱電機株式会社 | 監視制御装置、人工衛星および監視システム |
| JP2021008220A (ja) | 2019-07-02 | 2021-01-28 | 三菱電機株式会社 | 衛星制御装置、観測システム、観測方法、および観測プログラム |
-
2021
- 2021-03-09 JP JP2021037820A patent/JP7499720B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011155267A (ja) | 2011-02-18 | 2011-08-11 | Taruno Kazuo | 超軽量高出力発電人工衛星 |
| JP2019055776A (ja) | 2014-07-16 | 2019-04-11 | レイセオン カンパニー | 可動式サンシェードを備えた日射遮蔽システム |
| US20180239948A1 (en) | 2014-11-18 | 2018-08-23 | Elwha Llc | Satellite with machine vision for disaster relief support |
| JP2019156204A (ja) | 2018-03-14 | 2019-09-19 | 日本電気株式会社 | 光学機器の開口カバーおよびその開放方法 |
| WO2020158000A1 (ja) | 2019-01-28 | 2020-08-06 | 三菱電機株式会社 | 監視制御装置、人工衛星および監視システム |
| JP2021008220A (ja) | 2019-07-02 | 2021-01-28 | 三菱電機株式会社 | 衛星制御装置、観測システム、観測方法、および観測プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022138046A (ja) | 2022-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7086294B2 (ja) | 衛星コンステレーション、地上設備および人工衛星 | |
| US8706322B2 (en) | Method and computer program product for controlling inertial attitude of an artificial satellite by applying gyroscopic precession to maintain the spin axis perpendicular to sun lines | |
| WO2020158000A1 (ja) | 監視制御装置、人工衛星および監視システム | |
| JP2021070342A (ja) | 衛星コンステレーション | |
| US6082677A (en) | Satellite orbiting toward west in the equatorial plane and meteorological satellite system using the satellite | |
| US4374579A (en) | Spacecraft configuration permitting a continuous three-axes attitude control | |
| JP7139089B2 (ja) | 衛星コンステレーション、地上設備および人工衛星 | |
| JP2025146974A (ja) | 監視システム、人工衛星および地上設備 | |
| JP7499720B2 (ja) | 監視装置および監視衛星 | |
| JP7573684B2 (ja) | 観測衛星および地上設備 | |
| JP7349945B2 (ja) | 観測システム、通信衛星および地上設備 | |
| JP7479316B2 (ja) | 観測衛星 | |
| JP7455018B2 (ja) | 宇宙物体管理システム、地上設備、宇宙物体管理装置および監視衛星 | |
| JP7621298B2 (ja) | 月周回衛星 | |
| Heacock | Lunar photography: Techniques and results | |
| Sternberg et al. | Performance and evaluation of satellites Tiros I and Tiros II | |
| Scull | Mariner Mars 1969 navigation, guidance, and control | |
| Summers | Techniques of space photography | |
| JPH026005B2 (ja) | ||
| NAS | REPRODUCED 1BY NATIONAL TECHNICAL INFORMATION SERVICE | |
| Rao et al. | Innovative Mission Operations of IRS-P3 | |
| Kikuchi et al. | Six-Hour Orbit toward West Satellite (SHOWS) | |
| 大島武 et al. | Development of the Venus Climate Orbiter PLANET-C (AKATSUKI) | |
| TOVMASSIAN¹ et al. | O, B or early A type stars were obtained on the Glazar photographs at 1640 Å. The observations | |
| Reeves | In Pursuit of the Old Mars |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230301 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240305 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240417 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7499720 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |