本出願の実施形態は、ナビゲーション計画の精度を向上させるためのナビゲーション方法および装置を提供する。
第1の態様によれば、本出願の一実施形態はナビゲーション方法を提供する。本方法は、ターゲット車両のナビゲーション経路を提供するために使用される。本方法は、ナビゲーションマップモジュールによって実装され得る、または、ナビゲーションマップモジュールを含むナビゲーション装置によって実装され得る。本方法は:高精細マップモジュールによって送信されるターゲット車両の第1の位置情報を受信するステップであって、第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含む、ステップと;第1の位置情報および目的地に基づいてナビゲーション経路を決定するステップと;を含む。
上記の解決方法に基づいて、ターゲット車両の現在位置の車線情報は、ターゲット車両が現在位置している車線に適したナビゲーション経路の出発点(start point)をより正確に求めるために、高精細マップモジュールを使用することによってナビゲーションマップモジュールに提供されることができる。例えば、ターゲット車両が位置する車線が幹線道路に属すると判断される場合、幹線道路はナビゲーション経路の出発点として使用され得る。これは、従来技術ではターゲット車両の位置が幹線道路にあるか側道にあるかを区別できないために生じる経路計画の誤りを防ぐ。さらにナビゲーションマップモジュールは、ターゲット車両が現在位置している第1の位置の車線レベル道路情報を基づいて、ターゲット車両の実際の道路状況をより正確に決定して、より適切なナビゲーション経路を計画することができ、それによってナビゲーション効果を向上させる。
可能な実装では、第1の位置情報は、さらに、ターゲット車両が現在位置している第1の位置の第1のプリセット周辺領域範囲(first preset peripheral region range)の車線レベル道路情報を含む。
上記の方法によれば、ナビゲーションマップモジュールは、さらに、ターゲット車両が現在位置している第1のプリセット周辺領域範囲における車線レベル道路情報に基づいて、ターゲット車両の出発点の実際の道路状況をより良く決定して、より適切なナビゲーション経路を計画することができ、それによってナビゲーション効果を向上させる。
可能な実装では、第1の位置情報および目的地に基づいてナビゲーション経路を決定するステップは:第1の位置情報およびターゲット車両の目的地に基づいて初期ナビゲーション経路を生成するステップと;高精細マップモジュールに初期ナビゲーション経路を送信するステップと;高精細マップモジュールによって返された初期ナビゲーション経路の車線レベル道路情報を受信するステップであって、初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路の道路区間(road section)の車線レベル道路情報を含む、ステップと;初期ナビゲーション経路の車線レベル道路情報に基づいてナビゲーション経路を決定するステップと;を含む。
上記の解決策に基づいて、初期ナビゲーション経路は、ターゲット車両の出発点および目的地に基づいてナビゲーションマップモジュールに生成されて、高精細マップモジュールからのかつ初期ナビゲーション経路に基づいた車線レベル道路情報を取得することができる。さらに、ナビゲーションマップモジュールは、初期ナビゲーション経路の車線レベル道路情報に基づいて、ナビゲーションマップモジュール内の道路情報が適時に更新されない場合に計画された不適切なナビゲーション経路を更新することができる。このようにして、ユーザにより良いナビゲーション体験が提供され、ユーザのナビゲーション要件が満たされる。
可能な設計では、初期ナビゲーション経路の車線レベル道路情報は、さらに、初期ナビゲーション経路に対応する第2のプリセット周辺領域範囲における道路区間の車線レベル道路情報を含む。
上記の方法によれば、ナビゲーションマップモジュールはまた、第2のプリセット周辺領域範囲内の道路区間の車線レベル道路情報に基づいて、ナビゲーションマップモジュール内の道路情報が適時に更新されない場合に計画された不適切なナビゲーション経路を更新することができ、それによって、ナビゲーション経路を最適化する。このようにして、ユーザにより良いナビゲーション体験が提供され、ユーザのナビゲーション要件が満たされる。
可能な設計では、初期ナビゲーション経路の車線レベル道路情報に基づいてナビゲーション経路を決定するステップは:初期ナビゲーション経路の車線レベル道路情報に基づいて、通行不能または迂回が推奨される道路または車線が初期ナビゲーション経路に存在すると決定される場合に、通行不能または迂回が推奨される決定された道路または車線、並びに第1の位置情報およびターゲット車両の目的地に基づいて初期ナビゲーション経路を更新するステップと、ナビゲーション経路が更新された初期ナビゲーション経路であると決定するステップと;を含む。
上記の方法によれば、通行不可または迂回が推奨される道路または車線が初期ナビゲーション経路に存在すると決定した後、ナビゲーションマップモジュールは、初期ナビゲーション経路の車線レベル道路情報から、通行可能または走行が推奨される道路または車線を選択して、初期ナビゲーション経路を更新できる。これは、通行不能または迂回が推奨される道路や車線が初期ナビゲーション経路内に存在する場合を回避し、それによって、ユーザにより良いナビゲーション体験を提供し、ユーザのナビゲーション要件を満たす。
可能な設計では、初期ナビゲーション経路はK個の候補経路を含み、初期ナビゲーション経路の車線レベル道路情報に基づいてナビゲーション経路を決定するステップは:初期ナビゲーション経路の車線レベル道路情報に基づいてK個の候補経路からナビゲーション経路を選択するステップを含み、初期ナビゲーション経路の車線レベル道路情報は:第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線情報、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線利用可能(lane availability information)、または第2のプリセット周辺領域範囲における初期ナビゲーション経路によってサポートされる運転モード(driving mode)情報のうちの少なくとも1つを含む。
上記の方法によれば、ナビゲーションマップモジュールは、第2のプリセット周辺領域範囲における初期ナビゲーション経路の、車線情報、車線の空き状況情報、サポートされている運転モード情報などのうちの1つ又は複数に基づいて、K個の候補経路から、どの運転体験が現在の要件をより満たすかを使用することによって道路や車線を選択して、初期ナビゲーション経路を更新することができる。このようにして、ユーザにより良いナビゲーション体験が提供され、ユーザのナビゲーション要件が満たされる。
可能な設計では、本方法はさらに:高精細マップモジュールによって送信されるターゲット車両の第2の位置情報を受信するステップであって、第2の位置情報には、ターゲット車両が現在位置している第2の位置の車線情報を含む、ステップと;ナビゲーションマップモジュールによって、偏走(針路から逸れる、yaw)確率情報(probability information)を受信するステップであって、偏走確率情報は、ターゲット車両が第2の位置から移動し、その後ナビゲーション経路から逸脱する確率を示すために使用される、ステップと;偏走確率情報に基づいて、ナビゲーション経路を更新することを決定するステップと;第2の位置情報および目的地に基づいてナビゲーション経路を更新するステップと;を含む。
上記の方法によれば、ナビゲーションマップモジュールは、ターゲット車両が偏走したと決定しない場合(例えば、ターゲット車両がナビゲーション方向から外れた車線を移動したと高精細マップモジュールが決定する、またはターゲット車両がナビゲーション方向から外れた車線を移動すると予測する場合、ナビゲーションマップモジュールは、ターゲット車両が偏走したかどうかを決定できない)、ナビゲーションマップモジュールは、高精細マップモジュール(高精細マップモジュールは、ターゲット車両が位置している車線の車線情報に基づいて、ターゲット車両が偏走する可能性があることを決定し得る)によって送信される偏走確率情報を受信し、さらに、ナビゲーション経路から逸脱している確率および偏走確率情報で提供される確率に基づいて、ナビゲーション経路が更新される必要があるかどうかを決定することができ;ナビゲーション経路が更新される必要があると決定される場合、ナビゲーションマップモジュールは、ターゲット車両の第2の位置情報に基づいてナビゲーション経路を更新することができる。ターゲット車両の位置がナビゲーション経路からかなり長い距離ずれている場合にのみ再計画を実行することができる従来と比較して、本解決策では、ターゲット車両が偏走する可能性があることが早期に発見されて、可能性のある偏走を防ぐためにナビゲーション経路を早期に更新することができ、それによってユーザにより良いナビゲーション体験を提供する。
可能な設計では、本方法はさらに:高精細マップモジュールによって送信されたターゲット車両の第2の位置情報を受信するステップであって、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含む、ステップと;偏走アラーム情報(yaw alarm information)を受信するステップであって、偏走アラーム情報は、第2の位置がナビゲーション経路にないことを示すために使用される、ステップと);第2の位置情報および目的地に基づいてナビゲーション経路を更新するステップと;を含む。
上記の方法によれば、ナビゲーションマップモジュールが、ターゲット車両が偏走(例えば、ターゲット車両がナビゲーション方向から外れた車線を走行したと高精細マップモジュールが決定する場合、ナビゲーションマップモジュールは、ターゲット車両が偏走したかどうかを決定できない)したと決定しなかった場合、ナビゲーションマップモジュールは、高精細マップモジュール(高精細マップモジュールは、ターゲット車両が位置する車線の車線情報に基づいて、ターゲット車両が偏走したと決定し得る)によって送信される偏走アラーム情報を受信し、さらに偏走確率情報で提供される第2の位置情報に基づいてナビゲーション経路を更新することができる。ターゲット車両の位置がナビゲーション経路からかなり長距離ずれている場合にのみ再計画を実行することができる従来技術と比べて、本解決策では、ターゲット車両が偏走していることをより早期に発見して、偏走を防止するようにナビゲーション経路をより早期に更新することができ、それによって、ユーザにより良いナビゲーション体験を提供する。
可能な設計では、第2の位置情報は、さらに、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。さらに、ナビゲーションマップモジュールは、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報に基づいてナビゲーション経路を更新し得、それによってナビゲーション精度を向上させる。
可能な設計では、本方法はさらに:高精細マップモジュールによって送信された第3の位置情報を受信するステップであって、第3の位置情報は第3の位置の車線情報を含み、第3の位置は、第2の位置情報に基づいて高精細マップモジュールによって予測され、特定の期間後にターゲット車両が移動する可能性のある位置であり、第3の位置はナビゲーション経路にない、ステップと;第2の位置情報、第3の位置情報、および目的地に基づいてナビゲーション経路を更新するステップと;を含む。
上記の方法によれば、ナビゲーションマップモジュールは、ターゲット車両のものでありかつターゲット車両が位置する車線の車線情報などに基づいて高精細マップモジュールによって予測される、第3の位置情報を受信することができる。例えば、現在の車線が交差点であり、ターゲット車両が幹線道路から側道に移動しようとしていることを高精細マップモジュールが予測する場合、ナビゲーションマップモジュールは、ターゲット車両が現在位置している幹線道路の第2の位置情報と、ターゲット車両が幹線道路から移動しようとしている側道の第3の位置情報に基づいて、ターゲット車両が側道から移動し続けるナビゲーション経路を計画することができ、それによってユーザにより良いナビゲーション体験を提供する。
可能な設計では、本方法はさらに:ナビゲーションマップモジュールが、高精細マップモジュールによって送信されたターゲット車両の第1の位置情報の更新情報を受信し、第1の位置情報の更新情報は、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報の更新情報を含み;ナビゲーションマップモジュールは、第1の位置情報の更新情報および目的地に基づいて、更新されたナビゲーション経路を決定する。
上記の方法によれば、車両の移動プロセス(traveling process)において、ナビゲーションマップモジュールは、ターゲット車両が位置する車線が変化するにつれて、ターゲット車両の第1の位置情報の更新情報を受信し、さらにナビゲーション経路を更新することができる。このようにして、より良いナビゲーション体験がユーザに提供される。
可能な設計では、第1の位置情報の更新情報は、ナビゲーションマップモジュールが初期ナビゲーション経路を送信した後の第1の時点(first moment)にナビゲーションマップモジュールによって受信され;第1の時点は、ターゲット車両の移動速度に基づいて決定されるおよび/またはあらかじめ設定される。
上記の方法によれば、ナビゲーションマップモジュールは、第1の位置情報の更新情報を周期的に受信することができる、または、ターゲット車両の移動速度に基づいて、第1の位置情報の更新情報が受信される時間(time)を決定することができる。これは、ナビゲーションマップモジュールが、より良いナビゲーション経路計画を実装するために必要な車線レベル道路情報を取得できることを確実にする。
第2の態様によれば、本出願の一実施形態はナビゲーション方法を提供する。本方法は、ターゲット車両のためのナビゲーション経路を提供するために使用される。本方法は、高精細マップモジュールによって実装され得る、または、高精細マップモジュールを含むナビゲーション装置によって実装され得る。本方法は:ターゲット車両の測位情報(positioning information)に基づいてターゲット車両の第1の位置情報を生成するステップであって、第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含む、ステップと;第1の位置情報をナビゲーションマップモジュールに送信するステップであって、第1の位置情報は、ナビゲーション経路を決定するためにナビゲーションマップモジュールによって使用される、ステップと;を含む。
上記の解決策に基づいて、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報およびターゲット車両の現在位置の車線情報が、ターゲット車両が現在位置している車線をより正確に決定するために、高精細マップを使用することによって、ターゲット車両のものでありかつ高精細マップモジュールによって決定される測位情報に基づいて、決定される。これは、ターゲット車両の位置を決定できない、例えばターゲット車両が幹線道路にあるのか側道にあるのか決定できないために経路計画に誤りが生じる問題を効果的に回避できる。
可能な設計では、第1の位置情報は、さらに、ターゲット車両が現在位置している第1の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。さらに、ターゲット車両の第1の位置のより多くの車線レベル道路情報を、ナビゲーション計画の精度を向上させるために、ナビゲーションマップモジュールに提供することができる。
可能な設計では、本方法はさらに:ナビゲーションマップモジュールから初期ナビゲーション経路を受信するステップであって、初期ナビゲーション経路は、第1の位置情報および目的地に基づいてナビゲーションマップモジュールによって生成される、ステップと;初期ナビゲーション経路に基づいて初期ナビゲーション経路の車線レベル道路情報を決定するステップであって、初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路の道路区間の車線レベル道路情報を含む、ステップと;初期ナビゲーション経路の車線レベル道路情報をナビゲーションマップモジュールに送信するステップと;を含む。
上記の解決策に基づいて、初期ナビゲーション経路の車線レベル道路情報は、受信した初期ナビゲーション経路に基づいて決定されることができ、初期ナビゲーション経路の車線レベル道路情報は、ナビゲーションマップモジュールに送信される。これは、ナビゲーションマップモジュール内の道路情報が適時に更新されないために、不適切なナビゲーション経路が計画される場合を回避し、それによってユーザにより良いナビゲーション体験を提供し、ユーザのナビゲーション要件を満たす。
可能な設計では、初期ナビゲーション経路の車線レベル道路情報は:初期ナビゲーション経路において通行不能または迂回が推奨される道路または車線、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線情報、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線利用可能情報、または第2のプリセット周辺領域範囲における初期ナビゲーション経路によってサポートされる運転モード情報のうち少なくとも1つを含む。
上記の解決策に基づいて、高精細マップモジュールは、ナビゲーションマップモジュールに対してより豊富な車線レベル道路情報を提供して、ナビゲーションマップモジュールによるナビゲーション経路の計画の精度を向上させることができる。
可能な設計では、本方法はさらに:ターゲット車両の第2の位置情報を決定するステップであって、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含む、ステップと;第2の位置情報をターゲット車両に送信するステップと;ナビゲーション経路および第2の位置情報に基づいて、ターゲット車両の偏走確率情報を決定するステップであって、偏走確率情報は、ターゲット車両が第2の位置から移動し、その後ナビゲーション経路から逸脱する確率を示すために使用される、ステップと;ナビゲーションマップモジュールに偏走確率情報を送信するステップと;を含む。
上記の方法によれば、ナビゲーションマップモジュールは、ターゲット車両が偏走したと決定しない場合(例えば、ターゲット車両がナビゲーション方向から外れた車線を移動したと高精細マップモジュールが決定する、またはターゲット車両がナビゲーション方向から外れた車線を移動すると予測する場合、ナビゲーションマップモジュールは、ターゲット車両が偏走したかどうかを決定できない)、高精細マップモジュールは、ターゲット車両が位置する車線の車線情報に基づいて、ターゲット車両が偏走する可能性があることを決定し、さらにナビゲーション経路からの逸脱の確率を決定し、ナビゲーションマップモジュールの確率を提供することができる。このように、ターゲット車両が偏走する可能性があることを早期に発見して、ナビゲーション経路を早期に更新して起こり得る偏走を防ぐことができ、それによってユーザにより良いナビゲーション体験を提供する。
可能な設計では、本方法はさらに:ターゲット車両の第2の位置情報を決定するステップであって、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含む、ステップと;第2の位置情報をターゲット車両に送信するステップと;ナビゲーション経路および第2の位置情報に基づいて、ターゲット車両の偏走アラーム情報を生成するステップであって、偏走アラーム情報は、第2の位置がナビゲーション経路にないことを示すために使用される、ステップと;ナビゲーションマップモジュールに偏走アラーム情報を送信するステップと;を含む。
上記の方法によれば、ナビゲーションマップモジュールが、ターゲット車両が偏走したと判断しない場合(例えば、ターゲット車両がナビゲーション方向から外れた車線を移動したと高精細マップモジュールが決定する場合、ナビゲーションマップモジュールは、ターゲット車両が偏走したかどうかを決定できない)、高精細マップモジュールは、ターゲット車両が位置する車線の車線情報に基づいて、ターゲット車両が偏走したと判断し、さらに偏走アラーム情報をナビゲーションマップモジュールに送信することができ、その結果、ターゲット車両が偏走したことをナビゲーションマップモジュールが早期に発見して、より早くナビゲーション経路を更新して偏走を防止し、それによってユーザにより良いナビゲーション体験を提供する。
可能な設計では、第2の位置情報は、さらに、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。さらに、ナビゲーションマップモジュールは、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報に基づいてナビゲーション経路を更新し得、それによってナビゲーション精度を向上させる。
可能な設計では、本方法はさらに:ナビゲーション経路および第2の位置情報に基づいて第3の位置情報を生成するステップであって、第3の位置情報は、第3の位置の車線情報を含み、第3の位置は、第2の位置情報に基づいて高精細マップモジュールによって予測され、特定の期間後にターゲット車両が移動する可能性がある位置であり、第3の位置はナビゲーション経路にない、ステップと;第3の位置情報をナビゲーションマップモジュールに送信するステップと;を含む。
上記の方法により、高精細マップモジュールは、ターゲット車両が位置する車線の車線情報などに基づいて、ターゲット車両の第3の位置情報を予測することができる。例えば、現在の車線は交差点であり、高精細マップモジュールは、ターゲット車両が幹線道路から側道に移動しようとしていることを予測し、その結果、ナビゲーションマップモジュールは、ターゲット車両が現在位置している幹線道路の第2の位置情報およびターゲット車両が幹線道路から移動しようとしている側道の第3の位置情報に基づいて、ターゲット車両が側道から移動し続けるナビゲーション経路を計画することができ、それによって、ユーザにより良いナビゲーション体験を提供する。
可能な設計では、本方法はさらに:高精細マップモジュールは、ターゲット車両の現在の測位結果(positioning result)に基づいて、ターゲット車両の第1の位置情報の更新情報を決定する;また、高精細マップモジュールは、ターゲット車両の第1の位置情報の更新情報をナビゲーションマップモジュールに送信し、第1の位置情報の更新情報は、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報の更新情報を含む。
上記の方法によれば、ターゲット車両の移動プロセスにおいて、高精細マップモジュールは、ターゲット車両が位置する車線が変化するにつれて、ターゲット車両の第1の位置情報の更新情報を決定し、さらに、第1の位置情報の更新情報をナビゲーションマップモジュールに送信することができ、その結果、ナビゲーションマップモジュールはナビゲーション経路を更新し、それによってユーザにより良いナビゲーション体験を提供する。
可能な設計では、第1の位置情報の更新情報は、ナビゲーションマップモジュールが初期ナビゲーション経路を受信した後の第1の時点にナビゲーションマップモジュールによって送信され;第1の時点は、ターゲット車両の移動速度に基づいて決定される、またはあらかじめ設定される。
上記の方法によれば、高精細マップモジュールは、第1の位置情報の更新情報を周期的に決定することができる、または、ターゲット車両の移動速度に基づいて第1の位置情報の更新情報を決定することができる。これは、ナビゲーションマップモジュールが、より良いナビゲーション経路計画を実装するために必要な車線レベル道路情報を取得できることを確実にする。
例えば、第1の位置情報および第2の位置情報は:ターゲット車両の車両進行方向(vehicle head direction)、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線情報、またはターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線利用可能情報のうちの1つまたは複数を含む。
第3の位置情報は:ターゲット車両の予測車両進行方向、ターゲット車両の予測位置の第1のプリセット周辺領域範囲における車線情報、またはターゲット車両の予測位置の第1のプリセット周辺領域範囲における車線利用可能情報のうちの1つまたは複数を含む。
例えば、車線情報は:車線の数量、車線の番号(number of a lane)、車線方向情報、車線の始点と終点(lane start and end points)、車線変更点(lane change point)、車線曲率情報、車線勾配情報、または車線タイプのうちの1つまたは複数を含み;車線タイプは、主要道路車線、側道車線、合流車線、ランプ車線(ramp lane)、一方通行車線、双方向車線、または潮汐車線(tidal lane)を含み得る。
車線利用可能情報は:車線が通行可能かどうかを示す情報、車線の迂回が推奨されることを示す情報、道路状況(road condition)情報、または交通ルール情報のうち少なくとも1つを含む。
第3の態様によれば、本出願の一実施形態はさらに、第1の態様のステップを実行するように構成されたユニット、または第2の態様のステップを実行するように構成されたユニットを含むナビゲーション装置を提供する。具体的には、ナビゲーション装置は、トランシーバ(transceiver)ユニットおよび処理ユニットを含み得る。ナビゲーション装置は、第1の態様のナビゲーションマップモジュール、または、上記のナビゲーションマップモジュールを含む装置であり得る。代替的には、ナビゲーション装置は、第2の態様の高精細マップモジュール、または上記の高精細マップモジュールを含む装置であり得る。ナビゲーション装置は、上記の方法を実装するための対応するモジュール、ユニット、または手段(means)を含む。モジュール、ユニット、または手段は、ハードウェアを使用することによって実装され得る、ソフトウェアを使用することによって実装され得る、または、対応するソフトウェアを実行するハードウェアによって実装され得る。ハードウェアまたはソフトウェアは、上記の機能に対応する1つまたは複数のモジュールまたはユニットを含む。
第4の態様によれば、本出願の一実施形態は、さらに、少なくとも1つの処理要素および少なくとも1つのストレージ要素を含むナビゲーション装置を提供する。少なくとも1つのストレージ要素は、プログラムおよびデータを記憶するように構成される。少なくとも1つの処理要素は、少なくとも1つのストレージ要素に記憶されているプログラムおよびデータを呼び出して実行するように構成されて、本出願の実施形態の第1の態様若しくはその第1の態様の可能な実装解決策を実行する、または本出願の実施形態の第2の態様若しくはその第2の態様の可能な実装解決策を実行する、または本出願の実施形態の第1の態様またはその第1の態様および第2の態様の可能な実装解決策またはその第2の態様の可能な実装解決策を実行する。処理要素はプロセッサに基づいて実装され得、ストレージ要素はメモリに基づいて実装され得る。
第5の態様によれば、本出願の一実施形態はさらにコンピュータプログラム製品を提供する。コンピュータプログラム製品をプロセッサ上で実行すると、ナビゲーション装置は、第1の態様または第2の態様で提供される可能な方法を実装することを可能にされる。
第6の態様によれば、本出願の一実施形態はさらにコンピュータ記憶媒体を提供する。コンピュータ記憶媒体は、コンピュータプログラムを記憶する。コンピュータプログラムがプロセッサによって実行されると、ナビゲーション装置は、第1の態様または第2の態様で提供される可能な方法を実装することを可能にされる。
第7の態様によれば、本出願の一実施形態はさらにチップを提供する。チップは、メモリに格納されたコンピュータプログラムを読み取り、第1の態様または第2の態様で提供される可能な方法を実装するように構成される。チップはメモリに結合され得る。
第8の態様によれば、本出願の一実施形態はさらにチップシステムを提供する。チップシステムは、第1の態様または第2の態様で提供される可能な方法を実装するコンピュータ装置をサポートするように構成されたプロセッサを含む。可能な設計では、チップシステムはさらにメモリを含み、メモリはコンピュータ装置に必要なプログラムおよびデータを格納するように構成される。チップシステムは、チップを含み得る、または、チップおよび別の個別のデバイスを含み得る。
第9の態様によれば、本出願の実施形態は、さらに、第3の態様のナビゲーションマップモジュールに対応するナビゲーション装置、第4の態様の高精細マップモジュールに対応するナビゲーション装置、または第5の態様のナビゲーション装置を含む、ナビゲーションシステムを提供する。
第3の態様~第9の態様の解決策で達成できる技術的効果については、第1の態様の対応する解決策の技術的効果に関する記述を参照されたい。詳細はここでは説明しない。
以下、添付図面を参照して本出願の実施形態を詳細に説明する。
以下は、添付図面を参照して本発明の詳細をさらに説明する。明らかに、記載されている実施形態は、本出願の実施形態の一部であるが、すべてではない。方法の実施形態における特定の動作方法は、装置の実施形態にも適用され得る。本出願の実施形態の説明において、当業者は、本出願の第1及び第2のような様々な数字が単に説明を容易にするための区別のために使用されているだけであって、本出願の実施形態の範囲を限定することを意図していない、または順序を示すことを意図していないことを理解することができる。「複数の」は、2つ以上を意味する。「および/または」という用語は、関連付けられたオブジェクトを記述するための関連付け関係を表し、3つの関係が存在する可能性があることを表す。例えば、Aおよび/またはBは、次の3つの場合を表し得る:Aのみが存在する、AとBの両方が存在する、およびBのみが存在する。文字「/」は一般に、関連付けられたオブジェクト間の「または」の関係を示し、「少なくとも1つ」は1つまたは複数を意味し、「少なくとも2つ」は2つ以上を意味する。ここで、「少なくとも1つ」、「いずれか1つ」、またはそれらの類似表現は、単数形(アイテム)または複数形(アイテム)の任意の組み合わせを含む、これらのアイテムの任意の組み合わせを意味する。
本出願の実施形態で提供されるナビゲーション方法は、高度道路交通システム(intelligent transportation system)に適用され得る。高精細マップが、高度道路交通システムの車両のために利用されて交通サービス(traffic services)を実現することができる。本出願の実施形態における交通サービスは、様々な自動運転および補助運転サービス、例えば、経路計画を実行することおよび手動運転に対する危険の早期警告を提供すること、であり得る。上記の交通サービスは単なる例である。本出願の実施形態で提供されるナビゲーション方法は、車両の他の装置(車両からxへ、V2X)通信サービスへの迅速な起動と継続的な更新のための技術的準備を提供する。V2Xは、例えば、車々間(車両から車両へ、V2V)通信および車両からインフラ(車両からインフラストラクチャへ、V2I)通信である。
図1Aは、本出願の一実施形態が適用可能な通信システムの可能な概略構成図である。図1Aに示す通信システムは、端末装置101、ネットワーク装置102、マップサーバ103、測位サーバ104、アクセス装置105を含む。図1Aは、単に通信システムの概略的な構成図であることを理解すべきである。通信システムにおけるネットワーク装置102の数量、アクセス装置105の数量、端末装置101の数量は、本出願の本実施形態では限定されない。加えて、本出願の実施形態が適用可能な通信システムは、さらに、ネットワーク装置102、アクセス装置105、マップサーバ103、端末装置101に加えて、コアネットワーク装置、無線中継装置、無線バックホール装置などの他の装置を含み得る。いくつかのシナリオでは、ネットワーク装置102は特別なコアネットワーク装置であり、ネットワーク装置102がコアネットワークに属するかどうかは、本出願の本実施形態の実装に影響しないと代替的には考えられ得る。これは、本出願の本実施形態において限定されない。図1Aでは、端末装置101は、アクセス装置105に無線で接続され、アクセス装置105を使用することによってネットワーク装置102との通信リンクを確立し得る。少なくとも1つの端末装置101があり得る。端末装置101はアクセス装置105に無線で接続され得、アクセス装置105を使用することによって端末装置101間の通信接続が確立される。代替的には、端末装置101間の通信接続は有線で確立され得る。これはここでは限定されない。本出願の本実施形態では、各種装置間の数量関係は限定されない。例えば、複数の端末装置が1つのアクセス装置と通信してもよく、複数のアクセス装置が1つのネットワーク装置と通信してもよい。上記のシステムアーキテクチャが適用可能な通信システムは、時分割デュプレックスロングタームエボリューション(Time Division Duplexing-Long Term Evolution、TDD LTE)システム、周波数分割デュプレックスロングタームエボリューション(Frequency Division Duplexing-Long Term Evolution、FDD LTE)システム、ロングタームエボリューションアドバンスド(Long Term Evolution-Advanced、LTE-A)システム、およびその他の様々な進化した無線通信システム、例えば第5世代(5th generation、5G)の新無線(New Radio、NR)通信システム、または将来の様々な無線通信システムを含むが、これらに限定されない。本出願の本実施形態では、アクセス装置105は端末装置と通信できる装置であり得る。例えば、アクセス装置は、無線送受信機能を備えた任意の装置であり得る。アクセス装置105は、基地局(例えば、基地局、進化したNodeB、5G通信システムにおけるgNB、将来の通信システムにおける基地局またはネットワークデバイス、およびアクセスノード)、無線中継ノード、およびワイヤレスフィディリティ(wireless-fidelity、WiFi(登録商標))システムにおける無線バックホールノードを含むが、これらに限定されない。代替的には、アクセス装置は、クラウド無線アクセスネットワーク(cloud radio access network、CRAN)シナリオの無線コントローラであり得る。代替的には、アクセス装置は、小セル、伝送ノード(伝送基準点、TRP)などであり得る。もちろん、この適用はこれに限定されない。本出願の本実施形態の以降の説明では、端末装置101とネットワーク装置102との間の情報伝送は、アクセス装置105を使用することによって端末装置101とネットワーク装置102との間の情報伝送を実現する意味を持つ。本出願の本実施形態では、詳細については再度説明しない。本出願の本実施形態では、端末装置101は無線送受信機能を備えた装置である。端末装置101は、ネットワーク装置102に要求を送信し、ネットワーク装置102からデータを取得し得る。端末装置101は、ナビゲーションマップモジュールを使用することによってナビゲーション機能を実装する。端末装置101は、例えば、無人車両やロボットなどのインテリジェント端末、または無人運転機能を実装するように構成された車載端末である、または、携帯電話、タブレットコンピュータ、車載ナビゲーション端末であり得る。
本出願の本実施形態では、ネットワーク装置102のすべての機能は、1つの独立した物理装置に統合され得る、またはネットワーク装置102の機能は複数の独立した物理装置に分散され得る。これもまた、本出願の本実施形態では限定されない。ネットワーク装置102は、無線送受信機能を備えた装置であり、コアネットワーク内の他の装置が取得した端末装置のサービス情報に基づいて、特定のサービス機能を実現することができる。例えば、5GNRでは、ネットワーク装置はモバイルエッジコンピューティング(mobile edge computing、MEC)ネットワーク要素であり得る。MECネットワーク要素では、モバイルブロードバンド(mobile broad band、MBB)コアネットワークのアプリケーション、コンテンツ、およびいくつかのサービス処理とリソーススケジューリング機能が、アクセス側(アクセス装置)に近いネットワークエッジに一緒に展開され、ユーザに近いサービス処理と、アプリケーション、コンテンツ、およびネットワーク間のコラボレーションによって、信頼性の高い極端なサービス体験を提供し得る。なお、MECネットワーク要素と同様の機能を備えるネットワーク要素は、第4世代(4th generation、4G)無線通信ネットワークおよび第3世代(3rd generation、3G)無線通信ネットワークまたは他のネットワークに配置され得ることが理解できる。したがって、本出願の本実施形態では、ネットワーク装置の具体的な実装は特に限定されない。本出願の本実施形態では、ネットワーク装置102がMECネットワーク要素である場合、アプリケーションプログラムはMECネットワーク要素にロードされ得、その結果、MECネットワーク要素は、本出願の本実施形態で提供されるデータ伝送方法でネットワーク装置102によって実行されるステップを実行して、アクセス側に近いコアネットワークエッジでユーザ端末にサービスを提供し、それによって、相互作用遅延を低減する。
本出願の本実施形態では、マップサーバ103は、インターネット(Internet)上のサーバであり、比較的大きい記憶領域を持つ単一のサーバであり得る、または、複数のサーバを含むサーバクラスタであり得る、または、超大型記憶領域を持つクラウドサーバであり得る。マップサーバ103は通常、1つ以上の固定された場所に展開される。図1Aに示すように、マップサーバ103とネットワーク装置102との間には点線接続があり、マップサーバ103とネットワーク装置102がコアネットワークを介してデータを交換し得ることを示している。
可能な実装では、マップサーバ103は高精細マップのマップデータを記憶し得る。マップサーバ103の記憶領域は十分大きいため、マップサーバ103は、比較的大きいカバレッジ範囲の高精細マップのマップデータを記憶し得る。本出願の本実施形態では、マップサーバ103の高精細マップは、複数の領域を含み得、各領域は、識別子に対応する。可能な実装では、高精細マップは、行政区域の区分(例えば、地区や郡)に基づいて複数の領域に分割され得る。この場合、各地区または郡の名前が領域の識別子として使用され得る。別の可能な実装では、高精細マップは、あらかじめ設定された領域面積を単位として使用することによって、複数の正規領域に分割され得る。例えば、高精細マップは、1000平方メートルを単位として使用することによるラスタライズ(rasterization)によって、複数の正規領域に分割され得、対応する識別子が各領域に設定される。分割によって得られる領域は、代替的には別の形になり得ると理解できる。これは、本出願の本実施形態において限定されない。本出願の任意の領域に対応するマップデータは、高精細マップのマップデータにありかつ領域に対応するマップデータを含むことが理解されるべきである。例えば、図1Bに示す高精細マップのマップデータは、63の領域に対応するマップデータを含む。例えば、領域33に対応するマップデータは、高精細マップのマップデータにありかつ領域33に対応するマップデータを含む。加えて、任意の領域の識別子に対応するデータは、その領域に対応するデータと同等であり、その逆も同様である。本出願の本実施形態では詳細は説明しない。
図2に示すように、ナビゲーションシステムは、ユーザインターフェース、高精細マップモジュール、ナビゲーションマップモジュール、測位システム、およびセンサシステムを含む。可能な方法では、図2に示すナビゲーションシステムのすべての構成構造は、1つの端末装置に配置され、端末装置は、車両、携帯電話、ポータブルナビゲータ、または車載装置を含むが、これらに限定されない。別の可能な実装では、図2に示すナビゲーションシステムは、携帯電話などの非車載装置と車載装置の両方を含む。この場合、高精細マップモジュールおよびナビゲーションマップモジュールは、異なる装置に配置され得る。例えば、高精細マップモジュールは、携帯電話などの非車載装置に配置され得、ナビゲーションマップモジュールは、車載装置に配置され得る。代替的には、高精細マップモジュールは車載装置に配置され得、ナビゲーションマップモジュールは非車載装置に配置され得る。さらに別の可能な実装では、高精細マップモジュールは、ネットワーク側デバイス、例えば、サーバまたは道路側装置に配置され、ナビゲーションマップモジュールは、車載装置、携帯電話、または別の端末装置に配置される。高精細マップモジュールとナビゲーションマップモジュール間のデータ伝送を実現するために、高精細マップモジュールとナビゲーションマップモジュール間に通信リンクが確立され得る。
モジュールによって実装される特定の機能の詳細は次のとおりである:
ユーザインターフェースは、ナビゲーションシステムとユーザと間の情報交換を実現することができる。例えば、ユーザが移動する必要がある場合、ナビゲーションシステムは、移動先(traveling destination)をユーザインターフェース上に入力するようにユーザに指示するために、ユーザインターフェースに指示をポップアップ表示する。別の例として、ユーザが移動先を設定し、ナビゲーションシステムの移動計画モジュール(traveling planning module)が最適な移動経路を決定した後、ナビゲーションシステムによって最終的に決定された移動経路がユーザインターフェースに表示され得る。別の例として、ナビゲーションシステムは、車両の移動プロセスにおいてリアルタイムで、ユーザインターフェース上で、車両の現在位置および移動経路内の道路状態、例えば混雑状況、道路が通行不能かどうか、または道路の緊急修理状況を更新し得る。
測位システムは、GPSシステムであり得る、または、BeiDouシステムもしくは他の測位システムであり得、端末装置の地理的位置を推定するように構成され得る、または、測位サーバ104によって送信される端末装置の位置情報を受信するように構成され得る。例えば、端末装置101が車載装置である場合、測位モジュールは車両内に配置され得る、または測位モジュールは車載装置である。測位モジュールが車両内に配置される場合、具体的には、測位端末は、車両の屋根上に配置され得る、または決定される必要がある別の場所に配置され得る。端末装置101が携帯電話などの非車載装置である場合、測位モジュールは、携帯電話などの非車載装置に配置され得る。端末装置101内の測位モジュールは、測位サーバに測位要求を送信し、測位サーバによって返される測位モジュールの位置情報を受信し得る。
ナビゲーションマップモジュールによって取得される端末装置の位置情報は、測位システムに基づいて端末装置によって決定され得る。測位システムは、GNSS測位方法を使用することによって端末装置の位置を決定し得る。測位システムはさらに、コアネットワーク内に測位ネットワーク要素を含み得る。5G通信システムでは、測位ネットワーク要素は、コアネットワークおよび/または測位サーバのサービス能力公開機能(service capability exposure function、SCEF)ネットワーク要素であり得る。可能な実装では、SCEFネットワーク要素は、測位サーバから端末装置101の位置情報を取得し得る。測位サーバは:端末装置の位置情報を取得するために、セルID(Cell ID)に基づく測位方法、到達時間差(time difference of arrival、TDOA)に基づく測位方法、到達角(angle of arrival、AOA)に基づく測位方法などのうちの1つまたは複数を使用することによって端末装置を測位し得る。具体的には、測位サーバは、拡張サービングモバイルロケーションセンター(enhanced serving mobile location centre、E-SMLC)ネットワーク要素、および/またはゲートウェイモバイルロケーションセンター(Gateway Mobile Location Center)、または前述のネットワーク要素と同様の機能を持つ1つ以上のネットワーク要素であり得る。これは、本出願の本実施形態において限定されない。本出願の本実施形態では、測位サーバ104およびネットワーク装置102は、1つの物理装置に属し得る、または異なる物理装置に属し得ることが理解されるべきである。
ナビゲーションマップモジュールは、ナビゲーションマップデータを記憶する。高精細マップと比較して、ナビゲーションマップは道路レベルのナビゲーション情報のみを提供する。ナビゲーションアプリケーションまたはマップアプリケーションが端末装置101にインストールされ得、端末装置101は、ナビゲーションアプリケーションまたはマップアプリケーションを使用することによってインターネットを介してバックエンドマップサーバ103と通信し得る。端末装置101は、ナビゲーション機能を実現するために、ナビゲーションマップに基づいてナビゲーションコース(navigation trail)を生成し得る。ナビゲーションマップは、運転ルートナビゲーションの要件を満たすようにユーザにナビゲーション情報を提供し得る。例えば、ナビゲーションマップは、現在の道路の車線の数、速度制限情報、曲がり角情報(turning information)、ルート計画などのナビゲーション情報を提供し得る。
センサシステムは、車両の周囲環境に関する情報を感知するいくつかのセンサを含み得る。例えば、センサシステムは、測位システム、慣性測定ユニット(inertial measurement unit、IMU)、レーダー、レーザー距離計、およびカメラを含み得る。IMUは、慣性加速度に基づいて車両の位置および方向変化を感知するように構成されている。一実施形態では、IMUは加速度計とジャイロスコープの組み合わせであり得る。レーダーは、無線信号を使用することによって車両の周囲環境の物体を感知することができる。いくつかの実施形態では、物体を感知することに加えて、レーダーは、物体の速度および/または前進方向を感知するように構成することもできる。レーザー距離計は、レーザーを使用して、車両が位置する環境内の物体を感知することができる。いくつかの実施形態では、レーザー距離計は、1つ以上のレーザー源、レーザースキャナ、1つ以上の検出器、および別のシステムコンポーネントを含み得る。カメラは、車両の周囲環境の複数の画像をキャプチャするように構成され得る。カメラは、静止カメラまたはビデオカメラであり得る。さらに、車両は、カメラによってキャプチャされた画像を処理および分析し、車両の周囲環境の物体および/または特徴を識別するように動作することができるコンピュータビジョンシステムを含み得る。物体および/または特徴は、交通信号、道路境界、および障害物を含み得る。コンピュータビジョンシステムは、物体認識アルゴリズム、動きからの構造(Structure from Motion、SFM)アルゴリズム、ビデオトラッキング、および別のコンピュータビジョン技術を使用することができる。いくつかの実施形態では、コンピュータビジョンシステムは、環境の地図を描画し、物体を追跡し、物体の速度を推定するなどのように構成され得る。
高精細マップモジュールは、高精細マップの車線レベル道路情報を記憶するように構成される。高精細マップは、マップファイルの形式(例えば、シェープファイル(Shapefile)、ナビゲーションデータ規格(Navigation Data Standard、NDS)、OpenDRIVEなどの形式)で記憶され得る。シェープファイルは、空間データオープン形式であり、空間データの幾何学的および属性的特徴を記述し、地理的要素を格納するために使用されるファイルである。高精細マップのシェープファイルは、主に幾何情報および属性情報を含む。幾何情報は、車線情報の空間座標、すなわち車線情報の位置である。属性情報は、車線情報の属性情報であり、例えば、現在の車線が幹線道路車線か側道車線か、現在の車線が直進車線か右折車線か左折車線か別の車線かである。高精細マップモジュールは、さらに、マップサーバ103によって送信される高精細マップのマップデータを受信するように構成され得る。確かに、高精細マップモジュールはまた、高精細マップモジュール内の高精細マップデータを定期的に更新し得る。これは本明細書では限定されない。高精細マップモジュール内の高精細マップデータは、端末装置にあらかじめ記憶されている高精細マップであり得る、またはマップサーバ103によって端末装置に送信される高精細マップであり得る。高精細マップは、代替的には、車両またはマップサーバ103で更新され得る。例えば、マップサーバ103によって高精細マップが更新される場合、車両は、車両によって収集された車線情報をマップサーバ103に送信し得;マップサーバ103は最新の車線情報を決定する。マップサーバ103は、更新された高精細マップを積極的に端末装置に送信し得る、または、端末装置によって送信された問い合わせ要求に基づいて、高精細マップに対応する更新された車線情報を返し得る。特定の実装プロセスでは、対応する領域の高精細マップのマップデータは、ナビゲーションプロセス内で送信されて、端末装置101によって記憶される必要がある高精細マップデータを削減し得る。代替的には、マップサーバ103は、あらかじめ複数の領域の高精細マップのマップデータを配信し得、高精細マップデータを更新する必要性に応じて、高精細マップモジュール内の高精細マップデータを更新し得る。
高精細マップモジュールは、測位システムによって決定された端末装置の地理的位置を使用することによって、高精細マップ上の端末装置の推定位置を決定し得、推定位置の測位精度は車線レベル測位精度である。車両は、高精細マップデータと車両の周囲環境に関しかつセンサシステムおよびコンピュータビジョンシステムによって決定される情報とに基づいて特徴マッチングを実行して、高精細マップ上での車両の位置結果を決定し得る。位置決め結果の精度は、車線レベル測位精度に達することができる。
本出願の本実施形態では、高精細マップモジュールはナビゲーションシステムに追加され、ナビゲーションマップモジュールは改良され、その結果、ユーザによってユーザインターフェースで入力された移動先を受信した後、改良されたナビゲーションマップモジュールは、ユーザによって入力された目的地に基づいて、ナビゲーションマップの道路レベルデータと高精細マップモジュールの車両の車線情報を取得することによって、ユーザが目的地に到達できる少なくとも1つの移動経路を決定し;少なくとも1つの移動経路を決定した後、ユーザインターフェース上に少なくとも1つの移動経路を表示し、その結果、ユーザは実際の移動経路を選択し、それによって、車両の車線レベルの位置情報に基づいてユーザのためにより高精度でより正確な移動経路を計画し、増加するユーザの利用要求を満たすという目的を達成する。
さらに、自動運転システムでは、車両はさらに、移動計画モジュール、コーストラッカ(trail tracker)、実行器(executor)などを含み得る。移動計画モジュールは:自動運転システムのナビゲーションマップモジュールによって決定され、ユーザによって設定された移動要件に基づく、少なくとも1つの走行経路から、ユーザ要求(user requirement)と対応する移動構成情報(traveling configuration information)を最も満たす移動経路を決定し、決定された移動計画結果をコーストラッカおよび実行器に送信するように構成される。コーストラッカおよび実行器は全自動運転プロセスを完了する。コーストラッカは、移動計画モジュールによって送信された移動経路と対応する移動経路の移動構成情報とに基づいて、自動運転システムを運転するために作用するトルク指令とブレーキシステムのブレーキ指令を生成し、トルク指令およびブレーキ指令を実行のために対応する実行器に伝え、対応する実行器による指令を実行する過程でフィードバック情報を収集するように構成される。実行器は、運転システム(driving system)およびブレーキシステムを含み、コーストラッカによって伝えられるトルク指令およびブレーキ指令に従って車両の移動を制御するように構成される。少なくとも1つの移動経路を決定した後、ナビゲーションマップモジュールは、移動経路を自動運転システムの移動計画モジュールに提出する(submit)し得、その結果、移動計画モジュールは、ユーザ要求に基づいて移動経路から、ユーザ要求を最も満たす移動経路を選択することができる。
図2に示すナビゲーションシステムの構造図に基づいて、以下は、本出願の実施形態で提供されるナビゲーション方法を説明する。
本出願の実施形態で提供されるナビゲーション方法は以下を含み得る:ユーザは、図2のユーザインターフェース上で到達すべき目的地を入力し得る;ナビゲーションマップモジュールは、ユーザの現在位置と、ユーザによって入力された到達すべき目的地の位置に基づいて、ナビゲーションマップの道路トポロジーデータ(topology data)を照会し、高精細マップモジュールによって提供される現在の車線情報に基づいて、ユーザの現在位置(以下、略して出発地と呼ぶ)から目的地に到達できる少なくとも1つの移動経路を決定する。具体的には、本出願で言及されている少なくとも1つの移動経路は、高精細マップモジュール内の車線情報、ナビゲーションマップモジュール内の地図道路トポロジーデータ、およびユーザの出発地と目的地に基づいて、ナビゲーションマップモジュールによって提供され得る。移動計画モジュールまたは移動計画モジュール内の処理チップは、車線レベル移動モードアイコン、道路レベル移動モードアイコンなどをユーザインターフェース上に提示し得る。
図2に示すナビゲーションシステムに基づいて、本出願の実施形態で提供されるナビゲーション方法の実装は、以下のプロセスを含み得る。詳細は図3を参照されたい。
ステップ301。高精細マップモジュールは、ターゲット車両の測位情報に基づいて、ターゲット車両の第1の位置情報を決定する。
ターゲット車両の測位情報は、高精細マップ上のターゲット車両のものであって、測位モジュールによって受信された測位システムの位置情報とセンサシステムによって取得された車両の環境情報とに基づいて高精細マップモジュールによって決定される測位情報であり得る。測位情報は:車両が位置する車線、車両が位置する車線の属性情報、車両の移動姿勢(traveling posture)のうちの1つまたは複数を含み得る。
高精細マップモジュールによって決定される第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含み得る。
さらに、第1の位置情報は、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含み得る。第1のプリセット周辺領域範囲は、高精細マップ上の領域に対応し得る。例えば、ターゲット車両が領域1に位置すると決定される場合、領域1の車線レベル道路情報は、第1のプリセット周辺領域範囲における車線レベル道路情報として使用され得る。もちろん、ターゲット車両が位置する領域とその隣接領域が代替として、第1のプリセット周辺領域範囲として使用され得る。別の例として、ターゲット車両が位置する領域と、ターゲット車両が位置する領域の前の少なくとも1つの領域が、第1のプリセット周辺領域範囲として代替的に使用され得る。さらに、第1のプリセット周辺領域範囲は、車両の車速と車両が位置している環境の複雑さに基づいて決定され得る。例えば、ナビゲーション精度を向上させるために、車両の道路状況情報が複雑であると決定される場合、第1のプリセット周辺領域範囲は拡大され得る;または、車両の道路状況情報が単純であると決定される場合、第1のプリセット周辺領域範囲は狭くされ得る。
車線レベル道路情報は、ナビゲーション測位に必要な車線情報を含み得る。例えば、交差点、ランプ、または幹線道路もしくはオーバーパス(overpass)の側道などのナビゲーション測位シナリオにおける車線情報は:車線の始点と終点、車線変更点、右折専用車線の始点と終点、車線属性情報、または車線利用可能情報のうちのいずれか1つまたは複数を含み得るが、これらに限定されない。車線の始点と終点は、車線の始点と車線の終点を含む。車線の始点と終点は、道路上の複数の車線ライン(lane lines)の始点と終点を含む。車線の始点は車線の開始線上の点であり、車線の終点は車線の停止線上の点である。一般に、実際の用途では、車線の開始線と逆車線の停止線は直線上にある。車線変更点は、一部の道路に近接する交差点に方向転換車線(turning lane)が配置された場合に発生する分岐点であり得る、または交差点を通って新しい道路に入り車線が1つに減少する場合に発生する合流点であり得る、または高速道路/オーバーパスの出口車線の分岐点であり得る、または高速道路/オーバーパスの進入車線の合流点であり得る。結論として、車線変更点は、車線数を増加させることによって発生する分岐点、車線数を減少させることによって発生する収束点、高速道路(および/またはオーバーパス)の出口車線の分岐点、高速道路(および/またはオーバーパス)の進入車線の合流点のうちのいずれか1つまたは複数を含み得るが、これらに限定されない。右折専用車線の始点と終点は、右折専用車線の車線ライン(または車線ラインの延長線)と、右折専用車線の車線ライン(または車線ラインの延長線)に接続する2つの車線ラインとの間の交点が始点と終点として含まれる。車線の位置は、全地球測位システム(global positioning system、GPS)座標系における車線の座標値を使用することによって示され得る。具体的には、車線情報は車線の地理座標を含み得る。車線の位置を決定するには多くの方法がある。例えば、手動マーキング方法を使用することによって各車線の位置が収集され得る。オプションで、右折専用車線の始点と終点、および車線の始点と終点の位置がこの方法で決定され得る。本出願の本実施形態では、GPSと組み合わせて両眼視を使用することによって車線の位置を自動的に収集する方法が代替的に使用される。車線の位置を決定する方法は単なる例であり、これは本出願において限定されるものではないことが留意されるべきである。
車線情報は、車線識別子ID、ナビゲーションマップ上にあり、車線がマッピングされているメッシ
ュのメッシュID、ナビゲーションマップ上にあり、車線がマッピングされている道路のID、車線に対応する車線シーケンス番号、または車線タイプのうちの1つまたは複数を含み得る。車線情報は、高精細マップとナビゲーションマップとの間の関係を記述するために使用される。車線情報は表1を使用することによって示され得る。
道路識別子(road_ID)は、ナビゲーションマップ上にあり、車線情報がマッピングされている道路のIDを示すために使用され、異なる道路を区別するために使用され、車線情報とナビゲーションマップ上の道路との間のマッピング関係を確立するために使用される。road_IDは、従来のナビゲーションマップの道路線の属性から取得される。車線識別子は、車線シーケンス番号または車線ラインシーケンス番号(lane_num)であり得、車線情報に対応する車線のシーケンス番号を示すために使用され、異なる車線ラインまたは車線方向を区別するために使用される。例えば、双方向道路は、前進車線(forward lane)、逆車線(reverse lane)、潮汐車線などを含む。シーケンス番号[-n,...,-1]は、逆方向の第n車線~逆方向の第1車線を示すために使用され得る。[0]は、中央車線ラインを示す。シーケンス番号[1,...,n]は、前進方向の第1の車線~前進方向の第n車線を示す。一方通行道路では、シーケンス番号[0,...,n]は、前進方向の第0車線~前進方向の第n車線を示すために使用され得る。
さらに、車線情報は、異なるタイプに基づいて複数の車線情報タイプに分割され得る。例えば、車線情報は、車線情報タイプ1(type_1)、車線情報タイプ2(type_2)、車線情報タイプ3(type_3)、および車線情報タイプ4(type_4)を含み得る。車線情報タイプ1は、車線変更点、車線の始点と終点、右折専用車線の始点と終点を含み得る。異なるタイプは、異なるシーケンス番号、インデックス番号、またはIDによって示される。例えば、0は車線変更点を示すために使用され得、1は車線の始点と終点を示すために使用され得、2は右折専用車線の始点と終点を示すために使用され得る。車線情報タイプ2は、車線情報タイプ1の下位区分である。車線情報タイプ1はさらに、異なるシーケンス番号、インデックス番号、またはIDによって示され得る。例えば、-1は、車線変更点のサブタイプが車線の数が減少することを示すために使用される。1は、車線変更点のサブタイプが車線の数が増加することを示すために使用される。-1は、車線の始点と終点のサブタイプが車線の始点であることを示すために使用される。1は、車線の始点と終点のサブタイプが車線の終点であることを示すために使用される。-1は、右折専用車線の始点と終点のサブタイプが右折専用車線の始点であることを示すために使用される。1は、右折専用車線の始点と終点のサブタイプが右折専用車線の終点であることを示すために使用される。
車線情報タイプ3(type_3)は、左折車線、直進車線、右折車線、幹線道路の車線、側道の車線などの車線属性特徴を示し得、さらに車線方向情報および道路/車線の曲率および勾配などの属性情報を含み得る。確かに、車線属性情報は、さらに、合流車線、ランプ車線、一方通行車線、双方向車線、および潮汐車線などの情報を含み得る。
車線情報タイプ4(type_4)は、車線利用可能情報、すなわち、車線が現在利用可能かどうかを示す関連情報、例えば、交通規制、道路整備、交通ルール(バス専用車線の情報、速度制限情報、大型車車線、小型車車線、通行規制情報など)、道路状況、混雑状況を示し得る。lane_num、type、type_2、type_3、およびtype_4は、高精細マップの描画時または高精細マップの更新後に取得され得る。
ステップ302。高精細マップモジュールは、ターゲット車両の第1の位置情報をナビゲーションマップモジュールに送信する。
ステップ303。ナビゲーションマップモジュールは、高精細マップモジュールによって送信されたターゲット車両の第1の位置情報を受信する。
ステップ304。ナビゲーションマップモジュールは、第1の位置情報およびターゲット車両の目的地に基づいてナビゲーション経路を決定する。
第1の位置情報を取得した後、ナビゲーションマップモジュールは、さらに、ターゲット車両が現在位置している第1の位置に対応する車線情報に基づいて、ターゲット車両の車両進行方向を推定し得る。例えば、ターゲット車両の位置の車線情報に基づいて、ターゲット車両が位置する車線が南から北への車線であると決定する場合、ナビゲーションマップモジュールは、ターゲット車両の車両進行方向が南から北であると推測し得る。
さらに、第1の位置情報は、次の1つまたは複数を含み得る:ターゲット車両の車両進行方向。
ターゲット車両が逆方向に移動する可能性があることを考慮して、第1の位置情報は、さらに、ターゲット車両の車両進行方向を含み得る。さらに、ナビゲーションマップモジュールは、ターゲット車両の車両進行方向およびターゲット車両の位置の車線情報に基づいて、ターゲット車両が逆方向に移動しているかどうかを決定し得る。ターゲット車両が逆方向に移動していないと決定する場合、ナビゲーションマップモジュールは、ターゲット車両の車両進行方向に基づいて、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向を決定し、ナビゲーションに基づく出発地のスタート点としての方向に基づいて経路計画を実行し得る。
別の例として、ナビゲーションマップモジュールは、さらに、第1の位置情報にあり、かつ、ターゲット車両が現在位置している第1の位置にある車線の属性情報、例えば、その車線が幹線道路上の車線であるか側道上の車線であるか、に基づいて、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両がそこから移動する出発地を決定し、ナビゲーションに基づく出発地のスタート点としての車線の属性情報に基づいてナビゲーション経路計画を実行し得る。
別の可能な方法では、ナビゲーションマップモジュールは、ターゲット車両の位置の車線方向に基づいて、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向を決定し得る。例えば、ターゲット車両が位置している車線の車線方向が左折車線である、またはターゲット車両から左折車線の始点までの距離があらかじめ設定されたしきい値未満であると決定される場合、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が進行する必要がある方向は左折方向であると決定され得る。例えば、ターゲット車両が位置している車線の車線方向が右折車線である、またはターゲット車両から右折車線の始点までの距離があらかじめ設定されたしきい値未満であると決定される場合、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向は右折方向であると決定され得る。
さらに別の可能な実装では、ナビゲーションマップモジュールは、代替的に、第1のプリセット周辺領域範囲内の車線情報の車線属性情報に基づいて、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向を決定し得る。
例えば、ターゲット車両が位置している車線の車線方向が潮汐車線である、またはターゲット車両から潮汐車線の始点までの距離があらかじめ設定されたしきい値未満であると決定する場合、ナビゲーションマップモジュールは、通行(passing)が車線内で許可されかつ潮汐車線に現在対応している方向に基づいて、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向を決定し得る。さらに、ターゲット車両の車両進行方向に基づいて、ターゲット車両の車両進行方向が、通行が車線内で許可される方向とは反対であり、かつ、潮汐車線に現在対応すると決定される場合、潮汐車線は、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向または車線として使用されない。この場合、ターゲット車両の車両進行方向と同じ車線の方向が、ナビゲーションに基づいてターゲット車両が出発するときにターゲット車両が移動する必要がある方向として使用され得、現在の潮汐車線が利用できないことがユーザインターフェース上またはナビゲーション中に知らされ(prompted)、ターゲット車両の車両進行方向と同じ方向の車線が推奨車線としてユーザに提供される。
別の例として、ターゲット車両が位置している車線の車線方向が可逆車線(reversible lane)である、またはターゲット車両から可逆車線の始点までの距離があらかじめ設定されたしきい値未満であると決定する場合、可逆車線が直進および右折ができる車線である例を用いると、ナビゲーションマップモジュールは、選択のためのより多くの経路を提供するために、ナビゲーションに基づいてターゲット車両が出発するときに、ターゲット車両が移動する必要がある方向として直進方向と右折方向の両方を使用することによってナビゲーション経路計画を行い得る。
別の例として、ナビゲーションマップモジュールは、代替的に、第1のプリセット周辺領域範囲内の車線情報の車線曲率情報に基づいて、ターゲット車両の車両進行方向に一致する車線を決定し得る。例えば、ターゲット車両の前方の道路に4つの車線(車線1、車線2、車線3、車線4)があり、車線1、車線2、および車線3が直進車線であり、車線4が合流車線であると決定される場合、合流車線の影響により、車線1、車線2、および車線3の曲率は異なり、合流車線4に隣接する車線(車線3)の曲率が最も大きく、合流車線4から比較的離れた車線(車線1および車線2)の曲率は比較的小さい。この場合、ターゲット車両および4つの車線の位置ならびに4つの車線の曲率に基づいて、最低限の旋回が前方に移動するためにターゲット車両によって必要とされる車線がターゲット車両のために選択することを推奨できる。例えば、ターゲット車両が車線1に最も近いと決定される場合、ナビゲーションに基づいてターゲット車両が出発するときに、車線1が移動のために推奨される車線として使用され得る。ターゲット車両が車線3に比較的近いと決定される場合でも、車線の曲率を考慮すると、ナビゲーションに基づいてターゲット車両が出発するときに、車線2が、ターゲット車両が移動する必要がある車線として選択されることが推奨され得る。
別の可能な実装では、ナビゲーションマップモジュールは、代替的に、第1のプリセット周辺領域範囲内の車線情報の車線利用可能情報、例えば、道路状況情報に基づいて、ナビゲーションに基づいてターゲット車両が出発するときに移動に推奨される車線として渋滞がそれほど深刻でない車線または通行可能な車線を使用し得る。
例2
さらに、車両等の移動過程において、ナビゲーションマップ上の道路状況が適時に更新されないなどの理由で、ナビゲーションマップモジュールによって計画されたナビゲーション経路が利用できないことを回避するように、ナビゲーション経路の可用性を向上させるために、本出願の一実施形態は、さらに以下のステップを含むナビゲーション方法を提供する。
ステップ401。ナビゲーションマップモジュールは、第1の位置情報およびターゲット車両の目的地に基づいて初期ナビゲーション経路を生成する。
初期ナビゲーション経路を生成する具体的な方法については、上記の実施形態を参照されたい。詳細はここでは再度説明しない。確かに、ナビゲーションマップモジュールは、さらに、ターゲット車両の位置情報であり、測位システムによって決定される測位情報を受信し得、測位情報は道路レベルの測位情報である。さらに、ナビゲーションマップモジュールは、測位サーバからのターゲット車両の道路レベル精度の測位情報(road-level-precision positioning information)および目的地に基づいて初期ナビゲーション経路を生成し得る。
例えば、図4に示すように、ユーザは目的地点Yに地点Xから出発する必要がある。特定の実装では、まず、ユーザインターフェースが目的地入力ウィンドウを表示し、現在の移動の目的地を入力するようにユーザに促す。ユーザは。拡声器等による放送により、移動の目的地の入力を促され得る。ユーザがユーザインターフェース上で移動の目的地を入力することに成功した後、ナビゲーションマップモジュールは、ユーザによって入力された目的地を取得し、初期ナビゲーション経路として、ユーザの現在位置と取得した目的地の位置に基づいて、道路トポロジー情報、または高精細マップモジュールによって送信された第1の位置情報を参照して、ユーザの現在位置から目的地までの少なくとも1つの移動経路を計画する。例えば、図4を参照すると、ユーザが移動の目的地を入力した後、ナビゲーションマップモジュールは、ユーザの現在位置(つまり、出発地点X)および取得した目的地の位置(つまり、目的地Y)に基づいて、道路トポロジー情報、車線情報、および車線利用可能情報を参照して、目的地Yに到達できる3つの移動経路を計画し得る。3つの経路は、経路1、経路2、経路3であると仮定する。ここでは経路1が説明のための例として使用される。経路2および経路3の処理手順は経路1と同様であり、詳細は説明しない。
ステップ402。ナビゲーションマップモジュールは、初期ナビゲーション経路を高精細マップモジュールに送信する。
ステップ403。高精細マップモジュールは、ナビゲーションマップモジュールから初期ナビゲーション経路を受信し、さらに高精細マップモジュールは、初期ナビゲーション経路に基づいて初期ナビゲーション経路の車線レベル道路情報を決定する。
初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路の車線情報を含み得る。
可能な実装では、初期ナビゲーション経路に対応する道路の車線情報は、データ送信を削減するために、第2のプリセット周辺領域範囲における車線情報として使用され得る。例えば、初期ナビゲーション経路の車線レベル道路情報に基づいて、初期ナビゲーション経路に通行不能な道路または混雑した道路が存在すると決定する場合、ナビゲーションマップモジュールは、初期ナビゲーション経路の車線レベル道路情報として、通行不能な道路または混雑した道路の車線情報をナビゲーションマップモジュールに送信し得;その後、ナビゲーションマップモジュールは、通行不能な道路や混雑した道路を迂回し、ナビゲーション経路を再計画することができる。
さらに、初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路に対応する第2のプリセット周辺領域範囲における道路区間の車線レベル道路情報を含む。
再計画されたナビゲーション経路に通行不能な道路または混雑した道路が存在しないことを確実にするために、別の可能な実装では、第2のプリセット周辺領域範囲は、高精細マップ上にあり、初期ナビゲーション経路が位置している領域を含み得る。具体的には、移動経路は、少なくとも1つのサブ経路(subpath)に分割され得、各サブ経路の車線情報および車線利用可能情報が決定される。車線情報および車線利用可能情報は、サブ経路に対応する道路種別関連の速度制限情報、気象種別関連の速度制限情報、混雑状況などに基づいて決定され得る。車両のナビゲーション計画経路は、各サブ経路の車線情報および車線利用可能情報に基づいて決定される。
例えば、初期ナビゲーション経路がN個のサブ経路を含み、各サブ経路が高精細マップ上の1つの領域に属すると決定される場合、そのN個のサブ経路に対応する高精細マップ上のN個の領域は、第2のプリセット周辺領域範囲として使用され得る。さらに、ナビゲーションマップモジュールは、第2のプリセット周辺領域範囲における車線情報に基づいて、使用可能な車線または初期ナビゲーション経路の近くの道路を再計画経路として使用し得る。例えば、高精細マップモジュールは、経路1をN個のサブ経路に分割し、例えば、経路1を合計3つのサブ経路に:区間AB、区間BC、および区間CDに分割する。具体的には、図5Aに示すように、ユーザによって入力された目的地に基づいて道路トポロジー情報を照会する場合、ナビゲーションマップモジュールは、複数のサブ経路を得るために、信号機をノードとして使用することによって経路1を区間に分割し得る。図5Aを参照すると、経路1には2つの信号機がある。したがって、経路1は、分割点として2つの信号機を使用することによって3つの区間に分割され得る。3つの区間は、区間AB(サブ経路A1と呼ばれ得る)、区間BC(サブ経路A2と呼ばれ得る)、区間CD(サブ経路A3と呼ばれ得る)である。
代替的な解決策では、図5Bに示すように、初期のナビゲーション経路は、代替的に、道路の他の情報に基づいて、例えば道路がオーバーパス、トンネル、または橋であるかなどの属性情報に基づいて、区間に分割され得る。例として経路1が使用される。経路1が渡河橋(river-crossing bridge)1を含むと決定する場合、渡河橋1の始点(ノードK)および終点(ノードM)を分割点として使用することによって、経路1は3つの区間に分割され得る。経路2が例として使用される。経路2がトンネル1を含むと決定される場合、経路2は、トンネル1の始点(ノードI)および終点(ノードJ)を分割点として使用することによって、3つの区間に分割され得る。経路3が例として使用される。経路3がトンネル2を含むと決定される場合、経路3は、トンネル2の始点(ノードG)および終点(ノードH)を分割点として使用することによって、3つの区間に分割され得る。
この場合、高精細マップのマップデータに基づいて、現在の渡河橋1が通行不能または迂回が推奨されると決定される場合、渡河橋1に近い別の通行可能な渡河道路に関する情報が、第2のプリセット周辺領域範囲における車線情報として使用され得、その結果、ナビゲーションマップモジュールは、別の渡河道路に関する情報に基づいて、初期ナビゲーション経路内にあり、かつ、渡河橋1に対応するサブ経路区間を再計画し得る。確かに、代替的には、渡河道路が、再計画経路として選択され得るが、これはここでは限定されない。
別の例として、高精細マップにあり、トンネル1に対応する利用可能情報、例えば、気象状況、渋滞状況、道路種別に基づいて、トンネル1が現在、通行不能または迂回が推奨される道路であると決定され得る。トンネル1の利用可能情報が、暴風雨警報があり、警戒線を越えて水があるなど、トンネル1が通行不能であるという情報を含むと仮定すると、トンネル1は現在通行不能道路であると決定され得、高精細マップモジュールは、トンネル1近くの別のトンネルまたは渡河橋でスクリーニングを行って、トンネル1近くの別のトンネルまたは渡河橋が通行可能かどうかを決定し得る。トンネル1近くの別のトンネルまたは渡河橋も通行不能であると決定される場合、ナビゲーションマップモジュールに返され得る初期ナビゲーション経路の車線レベル道路情報は:トンネル1が通行不能であり、トンネル1近くのトンネルまたは渡河橋が通行不能であることを含み得る。さらに、ナビゲーションマップモジュールは、その情報に基づいて、初期ナビゲーション経路内にあり、トンネル1に対応するサブ経路区間を再計画して、トンネル1近くの通行不能なトンネル1および別の通行不能なトンネルまたは通行不能な渡河橋を迂回し得る。
別の例として、高精細マップ上にありかつサブ経路1に対応する利用可能情報、例えば渋滞状況および道路種別に基づいて、サブ経路1内にありかつターゲット車両が位置する車線、またはターゲット車両が到達すると予測される車線が、通行不能または迂回が推奨される車線であると決定され得る。サブ経路1の利用可能情報は:車線1が激しく混雑している、車線2が比較的混雑している、および車線3が混雑していないという情報を含むと仮定すると、車線1は現在、迂回が推奨されている車線であると決定され得る。高精細マップモジュールは、トンネル1近くの別の車線でスクリーニングを実行して、車線1近くの別の車線の混雑状況を決定し得る。車線1近くの別の車線の混雑状況が、車線2が比較的混雑しており、車線3が混雑していないと決定される場合、ナビゲーションマップモジュールに返され得る初期ナビゲーション経路の車線レベル道路情報は:車線1が激しく混雑している、車線2が比較的混雑している、車線3が混雑していないことを含み得る。さらに、ナビゲーションマップモジュールは、その情報に基づいて、ユーザに車線を変更することを推奨し得る、例えば、ユーザが車線2または車線3に車線を変更することを推奨し得る。
ステップ404。ナビゲーションマップモジュールは、高精細マップモジュールによって返される初期ナビゲーション経路の車線レベル道路情報を受信し、ナビゲーション地図装置は、初期ナビゲーション経路の車線レベル道路情報に基づいてナビゲーション経路を決定する。
候補移動経路は、ターゲット車両が出発地から目的地に到達しかつナビゲーションマップモジュールによって提供される少なくとも1つの移動経路から最初に決定され得る。候補移動経路は、各候補移動経路に必要な時間や距離長などが第1の位置情報に基づいて決定され、ターゲット移動経路がユーザ要求に基づいて決定される。
可能な実装では、初期ナビゲーション経路の車線レベル道路情報に基づいて、初期ナビゲーション経路に通行不能または混雑した道路が存在すると決定する場合、ナビゲーションマップモジュールは、決定された通行不能または混雑した道路と、第1の位置情報とターゲット車両の目的地とに基づいて初期ナビゲーション経路を更新し、更新された初期ナビゲーション経路をナビゲーション経路として決定する。
上記の例を参照すると、初期ナビゲーション経路の車線レベル道路情報が:渡河橋1が利用できず、かつ、渡河橋1近くの渡河橋2が利用できることを含む場合、渡河橋2は、渡河橋1の更新されたサブ経路として使用され得る。例えば、図5Cに示すように、横断橋2は、渡河橋1に対応するサブ経路A2の更新されたサブ経路A2'として使用される。さらに、初期ナビゲーション経路の別のサブ経路はまた、渡河橋2に基づいて適応的に調整され得、サブ経路A1が渡河橋2の出発地点に基づいてサブ経路A1'に適応的に修正され、サブ経路A3が渡河橋2の終点に基づいてサブ経路A3'に適応的に修正される。サブ経路A1およびサブ経路A3が適応的に変更された後、初期ナビゲーション経路の車線レベル道路情報に基づいて、修正されたサブ経路A1'および修正されたサブ経路A3'が通行可能かどうかがさらに決定され得る。初期ナビゲーション経路の車線レベル道路情報が、修正されたサブ経路A1'および修正されたサブ経路A3'に対応する車線レベル道路情報を含まない場合、修正された初期ナビゲーション経路(修正されたサブ経路A1'および修正されたサブ経路A3'を含む)はさらに、高精細マップモジュールに返され得、その結果、高精細マップモジュールは、修正された初期ナビゲーション経路の車線レベル道路情報(修正されたサブ経路A1'の車線レベル道路情報および修正されたサブ経路A3'の車線レベル道路情報を含む)をナビゲーションマップモジュールに送信し、さらにナビゲーションマップモジュールは、修正されたサブ経路A1'および修正されたサブ経路A3'が通行可能または通行が推奨される道路であるかどうかを決定し得る。具体的な処理については、上記の実施形態を参照されたい。詳細は、ここでは再度説明しない。
修正されたサブ経路A1'および修正されたサブ経路A3'が通行可能または通行が推奨される道路であると決定する場合、ナビゲーションマップモジュールは、修正されたサブ経路A1'および修正されたサブ経路A3'を更新された初期ナビゲーション経路、つまりナビゲーション経路として使用し得る。
可能な実装では、初期ナビゲーション経路はK個の経路を含み;ナビゲーションマップモジュールは、初期ナビゲーション経路の車線レベル道路情報に基づいて、K個の候補経路からナビゲーション経路を選択する。初期ナビゲーション経路の車線レベル道路情報は:第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線情報、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線利用可能情報、または第2のプリセット周辺領域範囲における初期ナビゲーション経路によってサポートされる運転モード情報のうち、少なくとも1つを含み得る。
例えば、ナビゲーションマップモジュールは、K個の経路に対応する車線レベル道路情報に基づいてK個の経路の混雑度をソートし得、さらにK個の経路の混雑度に基づいてK個の経路のスクリーニングを実行し得る。さらに、ナビゲーションマップモジュールは、さらに、K個の経路のサブ経路の道路種別、車線の曲率および勾配、サブ経路の現在の天気および交通流データに基づいて、K個の経路のサブ経路の最高車速、平均車速、加減速頻度(acceleration/deceleration frequency)などを決定し得る。さらに、スクリーニングは、上記の情報に基づいてK個の経路に対して実行される。別の例として、ナビゲーションマップモジュールは、さらに、車両に対して選択された移動モードに基づいて、K個の経路にマッチングを実行し得る。例えば、現在、ほとんどの車両は:スポーツ、ノーマル、エコの3つの制御モードを有する。確かに、車両技術の発展により、より多くの他の可能な制御モードも開発される可能性がある。これは本出願において限定されない。上記の3つの制御モードにおける車両の加減速/制動レベルは異なる。例えば、スポーツモードでは、車両は最も高い加減速度を有し、すなわち、加減速の時間が比較的短い;車両は、比較的早く加速または減速することができ、複雑な道路条件および比較的大量のカーブがあり道路種別の切り替えが頻繁に発生する経路にも適応することができる。ノーマルモードでは、車両は、スポーツモードより低い加減速度を有する。エコモードでは、車両は比較的低い加減速度を有する。エコモードは、3つのモードの中で最も低い加減速度を伴うモードである。このモードでは、車両は、加速または減速に比較的長い時間がかかる。ナビゲーション経路にある事例がある、例えば、車線の切り替えが頻繁に発生する、オーバーパスに入る若しくは出る、複数のカーブがある場合、これは運転経験の向上につながらない。したがって、ナビゲーションマップモジュールは、異なる移動モードに基づいてナビゲーション経路のスクリーニングを対応して実行し得る。
別の例として、移動モードは、代替的に、異なる自動運転モードに基づいて分割され得る。例えば、移動モードは、手動運転、自動運転、連続長距離自動運転などのモードを含み得る。この場合、ナビゲーションマップモジュールは、経路に適した移動モードに基づいてスクリーニングを実行し得る。例えば、経路1が自動運転をサポートすると仮定すると、ナビゲーションマップモジュールが、ターゲット車両が自動運転モードを選択したと決定する場合、経路1はナビゲーション経路として使用され得る。経路1の距離の20%だけが自動運転をサポートすると仮定すると、ナビゲーションマップモジュールが、ターゲット車両が自動運転モードを選択したと決定する場合、経路1は選択することを推奨しないルートとして使用される。別の例として、連続距離が予め設定されたしきい値を超えるサブ経路が経路1に存在すると決定される場合、ターゲット車両がサブ経路1の範囲内に移動するときにサブ経路1はユーザに表示されて、サブ経路1で自動運転モードが選択され得ることをユーザに知らせ得る。異なるナビゲーション経路選択条件が異なる移動モードに対応して設定されて、異なる移動モードに適応し得、ナビゲーション経路計画のパフォーマンスをさらに向上させる。
従来技術では、ナビゲーションマップのマップデータの更新ソースは比較的一元的(relatively unitary)であり、すべてのマップデータは、主に、地図に依存して、比較的遅れて更新され、したがって、道路が通行可能かどうかを適時に決定することが不可能であり得る。これに対し、本出願の本実施形態では、高精細マップにおける車線情報を収集するための比較的多様な方法があり、上記の実施形態で述べた複数の方法(例えば、道路上の車両または道路側ユニットなどの装置が周囲環境情報を収集する)が使用され得る。したがって、道路の実際の通行状況が、高精細マップから適時に取得され得、初期のナビゲーション経路の車線レベル道路情報が、さらに高精細なマップモジュールを使用することによって提供され、その結果、ナビゲーションマップモジュールによって計画されたナビゲーション経路をより正確にすることができ、ナビゲーション計画の性能を向上させることができる。
例3
移動過程のシナリオでは、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報は、さらに、ターゲット車両の測位結果の変更に基づいてナビゲーションマップモジュールに送信され得、その結果、ナビゲーションマップモジュールは、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報に基づいてナビゲーション計画経路を更新し得る。以下のステップが具体的に含まれ得る:
ステップ501。高精細マップモジュールは、ターゲット車両の現在の測位結果に基づいて、ターゲット車両の第1の位置情報の更新情報を決定する。
第1の位置情報の更新情報は、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線レベル道路情報の更新情報を含む。
例えば、ターゲット車両の移動位置が第1のプリセット周辺領域範囲を超えている場合、高精細マップモジュールは、ターゲット車両の現在の測位結果に基づいてターゲット車両の第1の位置情報を再決定し、再決定した第1の位置情報を第1の位置情報の更新情報としてナビゲーションマップモジュールに送信し得る。
可能な実装では、第1の位置情報の更新情報は、ナビゲーションマップモジュールが初期ナビゲーション経路を受信した後に、第1の時点にナビゲーションマップモジュールによって送信され得;第1の時点は、ターゲット車両の移動速度に基づいて決定される。
例えば、車両の移動速度に基づいて、ターゲット車両の移動位置が第1のプリセット周辺領域範囲を超えそうであることを予測する場合、高精細マップモジュールは、第1の位置情報の更新情報を受信するときに、ナビゲーションマップモジュールがナビゲーションを更新するのに十分な時間を有するように、ターゲット車両の現在の測位結果に基づいて、ターゲット車両の第1の位置情報を決定し得る。
別の可能な実装では、ターゲット車両の現在の測位位置に対応する第1の位置情報の更新情報があると高精細マップモジュールが決定するときに、第1の位置情報の更新情報が高精細マップモジュールによってナビゲーションマップモジュールに送信される。
例えば、図6に示すように、出発点におけるターゲット車両の測位結果がAであり、その測位結果Aに対応する第1のプリセット周辺領域範囲が領域Aである。ターゲット車両が測位結果Bまで移動し、ターゲット車両の前方のナビゲーション経路がサブ経路A2を含み、かつ、その測位結果Bが領域Aの範囲を超えないとき、高精細マップモジュールは、ターゲット車両の現在の測位結果Bの前方のサブ経路A2の車線情報が変化したと決定する。この場合、高精細マップモジュールは、ターゲット車両の測位結果Bに基づいて、測位結果Bに対応する第1のプリセット周辺領域範囲が領域Bであると決定し得、その領域Bの車線情報をターゲット車両の第1の位置情報の更新情報として使用し得る。代替的には、高精細マップモジュールは、ナビゲーションマップモジュールに、サブ経路A2の車線情報が変化した情報を、第1の位置情報の更新情報として送信し得る。
ステップ502。高精細マップモジュールは、ターゲット車両の第1の位置情報の更新情報をナビゲーションマップモジュールに送信する。
ステップ503。ナビゲーションマップモジュールは、高精細マップモジュールによって送信されたターゲット車両の第1の位置情報の更新情報を受信し、ナビゲーションマップモジュールは、第1の位置情報の更新情報および目的地に基づいて、更新されたナビゲーション経路を決定する。
ナビゲーションマップモジュールは、第1の位置情報の更新情報に基づいてナビゲーション計画経路を更新し得る。例えば、移動に推奨される車線、ターゲット車両が次のサブ経路に移動する予測時間、移動距離長などが、ターゲット車両が位置する車線に基づいてターゲット車両に提供されて、ナビゲーション放送内容の精度およびナビゲーション放送効果を向上する。
ステップ504。ナビゲーションマップモジュールは、ユーザに更新されたナビゲーション経路を表示する。
例4
車両の移動過程において、車両がナビゲーション計画経路に従って走行しないシナリオがあり得る。例えば、道路の混雑により車両が車線変更を適時にしない、または、車両が、車線識別情報の更新などの問題により指定された方向の車線に進入せず、したがって、車両が偏走している可能性があるまたは偏走している。しかし、従来技術では、ターゲット車両が誤った車線に入ると、ナビゲーションマップモジュールは、偏走する可能性や偏走したことを発見できない。ナビゲーションマップモジュールは、ターゲット車両がナビゲーション経路から逸脱した別の道路を移動している、すなわち、ターゲット車両がナビゲーション経路から特定の距離だけ完全に逸脱していることを発見した後でのみ、ターゲット車両が偏走していると決定し、その後ルートを再計画することができる。その結果、ターゲット車両は逸脱したルートを適時に修正できない。
上記の問題に基づいて、本出願の本実施形態では、高精細マップモジュールは、さらに、ターゲット車両の測位結果に基づいて、ターゲット車両が位置する車線を決定し得、その後、ナビゲーションマップモジュールによって高精細マップモジュールに送信された初期ナビゲーション経路と車線を比較して、ターゲット車両が偏走している可能性があるまたは偏走しているかを推定し得る。さらに、高精細マップモジュールは、偏走に対応する情報をナビゲーションマップモジュールに送信し得、その結果、ナビゲーションマップモジュールは、ターゲット車両の第2の位置情報と、ターゲット車両が偏走している可能性があるまたは偏走しているという情報とに基づいて、ナビゲーション経路を再計画する。これにより、ターゲット車両が偏走している可能性があるという情報を受信した後、ターゲット車両は適時に走行経路を更新することができ、偏走の影響を軽減する。
可能なシナリオでは、ナビゲーションマップモジュールが現在位置情報およびターゲット車両の目的地に基づいてナビゲーション経路を決定した後、次のステップが実行され得る。
ステップ601。高精細マップモジュールは、ターゲット車両のナビゲーション経路および第2の位置情報に基づいて、ターゲット車両の偏走確率情報を決定する。偏走確率情報は、ターゲット車両が第2の位置から移動し、その後、ナビゲーション経路から逸脱する確率を示すために使用される。第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含み得る。さらに、第2の位置情報は、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含み得る。
例えば、図7Aに示すように、高精細マップモジュールは、ターゲット車両が位置する車線が車線1であり、車線1の車線方向が左折方向であると決定する。高精細マップモジュールは、ナビゲーション経路に基づいて、ターゲット車両が現在の道路を直進方向に移動すべきであると決定し得る。したがって、高精細マップモジュールは、ターゲット車両が現在の車線に従って移動し続けている場合、ターゲット車両が交差点を通行するときに、ターゲット車両が左折車線に入って偏走する比較的高い確率があると決定し得る。ターゲット車両が誤った車線に入ったために、ターゲット車両が偏走したシナリオでは、ターゲット車両は、ターゲット車両の偏走確率が、ターゲット車両が偏走する可能性のある場所で車線変更が許可されているかどうかなどの要因に関連すると決定する。したがって、偏走確率情報は、ターゲット車両が現在位置している第2の位置に基づいて決定され得る。例えば、図7Aに示すように、ターゲット車両の位置で車線変更が許可されている、すなわち、ターゲット車両は左折車線から直進車線に切り替わり得る。したがって、この場合の偏走確率は比較的低い。図7Bに示すように、ターゲット車両の位置では車線変更は許可されない。したがって、この場合のターゲット車両の偏走確率は比較的高い。確かに、偏走確率情報はまた現在の車線の混雑度にも関連し得る。言い換えれば、偏走確率情報はまた、車両が現在の交差点を通行するときに車両に起こる偏走(yaw)に関する履歴データに基づいて決定され得る。これはここでは限定されない。
さらに、偏走確率情報には第3の位置情報を含み得、第3の位置情報は第3の位置の車線情報を含み、第3の位置は第2の位置情報に基づいて高精細マップモジュールによって予測され、特定の期間後にターゲット車両が移動する可能性がある位置であり、第3の位置はナビゲーション経路内にはない。
例えば、図7Cに示すように、高精細マップモジュールは、ターゲット車両があらかじめ設定された距離範囲(交差点など、ターゲット車両が走行しようとしている道路)を通行するときに、ターゲット車両が左折方向に相当する道路に到達する比較的高い確率があると予測する。この場合、高精細マップモジュールは、次の時点で、ターゲット車両が第3の位置情報によって示される位置Cに到達すると予測し得、位置Cに対応する車線情報は車線2である。次の時点は、ナビゲーションマップモジュールがナビゲーション経路を適時に更新するために、ナビゲーションマップモジュールが偏走確率情報を取得した後、経路を再計画するためにナビゲーションマップモジュールによって必要とされる応答時間であり得る。高精細マップモジュールがあらかじめ設定された距離範囲(領域C)の位置Cに移動する確率は、ターゲット車両の過去の記録に基づいて決定され得る、現在の交差点における交通ルール違反の過去の記録に基づいて決定され得る、または、別の方法で決定され得る。これはここでは限定されない。
ステップ602。高精細マップモジュールは、偏走確率情報をナビゲーションマップモジュールに送信する。
ステップ603。ナビゲーションマップモジュールは、高精細マップモジュールによって送信されるターゲット車両の第2の位置情報および偏走確率情報を受信する。
偏走確率情報を受信した後、ナビゲーションマップモジュールは偏走確率情報に基づいて対応するプロンプト情報(prompt information)を生成し得る。可能な方法では、プロンプト情報は、ターゲット車両が偏走する可能性があることを知らせる(prompt)ために使用され得る。上記の例を参照すると、ナビゲーションマップモジュールは、ターゲット車両が誤った車線を移動し、偏走しようとしていることをユーザに通知し、偏走を修正するように適時にユーザに気づかせ得る。例えば、図7Aに示すように、ターゲット車両の位置で車線変更が認められている、すなわち、ターゲット車両は左折車線から直進車線に切り替わり得る。この場合、ナビゲーションマップモジュールは、可能性のある偏走を適時に修正するようにユーザに気づかせ得、それによってナビゲーション効果を向上させ、車両が誤った車線を移動するために生じる車両の不必要な迂回を回避して、ナビゲーション効果を向上させる。別の可能な方法では、プロンプト情報はさらに、偏走位置などに基づいてナビゲーション経路が切り替えられる必要があるかどうかをユーザに知らせるために使用され得る。上記の例は引き続き使用される。図7Bに示すように、ターゲット車両の位置では車線変更は許可されない。この場合、ユーザは、現在の車線が左折車線であることに気付かずに、元のナビゲーションルートに従って移動し続けたときに生じる交通ルール違反を回避するために、偏走位置に基づいてナビゲーション経路を切り替えることを選択し得、それによってナビゲーション効果を向上させる。
ステップ604。ナビゲーションマップモジュールは、第2の位置情報、偏走確率情報、および目的地に基づいてナビゲーション経路を更新する。
ナビゲーションマップモジュールは、第2の位置情報のターゲット車両の車線情報、ターゲット車両の現在位置に対応する第1のプリセットインターバル範囲の車線レベル道路情報、および目的地に基づいて、ナビゲーション経路を再計画し得る。具体的な実装については、上記の実施形態のナビゲーション経路計画方法を参照されたい。詳細はここでは説明しない。例えば、図8Aに示すように、ターゲット車両の現在位置Aが位置する車線が車線1である。ナビゲーションマップモジュールは、現在位置A、現在位置Aに対応する第1のプリセットインターバル範囲の車線レベル道路情報、目的地Yに基づいて経路1aを計画し得る。ナビゲーションマップモジュールは、計画された経路を候補経路としてナビゲーションマップモジュールに格納し得る、または計画された経路をユーザインターフェースに直接表示して、ナビゲーション経路を切り替える必要があるかどうかをユーザに通知し得る。ナビゲーション経路間の切り替えを実行するためにユーザの指示を受信した後、ナビゲーションマップモジュールは、候補経路を更新されたナビゲーション経路として使用し、更新されたナビゲーション経路をユーザに表示する。
さらに、ナビゲーションマップモジュールは、ターゲット車両が到達すると予測されかつ第3の位置情報、予測された位置に対応する第1のプリセットインターバル範囲の車線レベル道路情報、および目的地によって示される位置に基づいて経路計画を実行し得、計画された経路を候補経路としてナビゲーションマップモジュールに格納し得る。例えば、図8Bに示すように、ターゲット車両の現在位置Aが位置する車線が車線1、ターゲット車両の予測位置Cが位置する車線が車線2である。ナビゲーションマップモジュールは、予測位置C、予測位置Cに対応する第1のプリセットインターバル範囲cの車線レベル道路情報、目的地Yに基づいて経路1bを計画し得る。ナビゲーション経路間の切り替えを実行するためにユーザの指示を受信するとき、または第3の位置情報によって示される位置にターゲット車両があると決定する場合に、ナビゲーションマップモジュールは、経路1bを更新されたナビゲーション経路として使用し、更新されたナビゲーション経路をユーザに表示する。
別の可能な方法では、ナビゲーション経路計画の堅牢性を向上させ、ターゲット車両の予測位置と実際の位置との間の相対的に大きいずれのナビゲーション経路計画への影響を避けるために、本出願の本実施形態では、ナビゲーション経路は、代替的に、第2の位置情報におけるターゲット車両の現在位置A、ターゲット車両の現在位置Aに対応する第1のプリセットインターバル範囲の車線レベル道路情報、ターゲット車両が到達すると予測されかつ第3の位置情報にある位置C、ターゲット車両の予測位置Cに対応する第1のプリセットインターバル範囲cの車線レベル道路情報、および目的地に基づいて計画され得、計画された経路は、候補経路としてナビゲーションマップモジュールに格納される。例えば、図8Cに示すように、ターゲット車両の現在位置Aが位置する車線が車線1であり、ターゲット車両の予測位置Cが位置する車線が車線2である。ナビゲーションマップモジュールは、現在位置A、現在位置Aに対応する第1のプリセットインターバル範囲内の車線レベル道路情報、予測位置c、予測位置に対応する第1のプリセットインターバル範囲c内の車線レベル道路情報、目的地Yに基づいて経路1cを計画する。ナビゲーション経路間の切り替えを実行するためにユーザの指示を受信するとき、またはターゲット車両が第3の位置情報によって示される位置にあると決定する場合、ナビゲーションマップモジュールは、経路1cを更新されたナビゲーション経路として使用し、更新されたナビゲーション経路をユーザに表示する。
別の可能なシナリオでは、ナビゲーションマップモジュールが、現在位置情報およびターゲット車両の目的地に基づいてナビゲーション経路を決定した後、次のステップが実行され得る。
ステップ701。高精細マップモジュールは、ナビゲーション経路およびターゲット車両の第2の位置情報に基づいて、ターゲット車両の偏走アラーム情報を決定する。
偏走アラーム情報は、第2の位置情報を含み、偏走アラーム情報は、ターゲット車両が現在位置している第2の位置がナビゲーション経路上にないことを示すために使用される。
ステップ702。高精細マップモジュールは、ナビゲーションマップモジュールに偏走アラーム情報を送信する。
ステップ703。ナビゲーションマップモジュールは、偏走アラーム情報を受信し、第2の位置情報、偏走アラーム情報、および目的地に基づいて、ナビゲーション経路をさらに更新する。
ステップ704。ナビゲーションマップモジュールは、ユーザに更新されたナビゲーション経路を表示し得る。
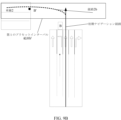
例えば、図9Aに示すように、第2の位置情報は、ターゲット車両の現在位置Bと、現在位置Bに対応する第1のプリセット周辺範囲b内の車線情報とを含み得る。例えば、第2の位置情報は車線1を含む。上記の例を参照すると、ナビゲーションマップモジュールは、現在位置B、車線1、および目的地に基づいてナビゲーション経路計画を実行し得、計画された経路2aを候補経路としてユーザインターフェースに表示し得る。ユーザからナビゲーション経路間の切り替えを実行するためにユーザの指示を受信した後、ナビゲーションマップモジュールは、候補経路2aをナビゲーション経路として使用する。
さらに、偏走アラーム情報は、第3の位置情報を含み得、第3の位置情報は、ターゲット車両が移動することが予測されかつ第2の位置情報に基づいて高精細マップモジュールによって決定される予測位置B’の車線情報と、予測位置B’の第1のプリセットインターバル範囲b’の車線情報を含み得る。
別の例として、図9Bに示すように、第3の位置情報は、ターゲット車両の予測位置B’および予測位置B’に対応する第1のプリセット周辺範囲b’の車線情報を含み得る。例えば、第3の位置情報は車線2を含む。上記の例を参照すると、ナビゲーションマップモジュールは、予測位置B’、車線2、および目的地に基づいてナビゲーション経路計画を実行し得、計画された経路を候補経路としてユーザインターフェースに表示し得る。ナビゲーション経路間の切り替えを実行するためのユーザの指示を受信するとき、または第3の位置情報によって示される位置にターゲット車両があると決定するとき、ナビゲーションマップモジュールは、候補経路を更新されたナビゲーション経路として使用し、更新されたナビゲーション経路をユーザに表示する。
さらに、ナビゲーションマップモジュールは、上記の第3の位置情報、第2の位置情報、および目的地に基づいてナビゲーション経路を再計画し得る。
別の代替的な解決策として、図9Cに示すように、ナビゲーションマップモジュールは、ターゲット車両の現在位置B、現在位置Bに対応する第1のプリセット周辺範囲bの車線情報、ターゲット車両の予測位置B’、予測位置B’に対応する第1のプリセット周辺範囲b’の車線情報に基づいてナビゲーション経路計画を実行し得る。例えば、ナビゲーションマップモジュールは、車線1、予測位置B’、車線2、および目的地に基づいてナビゲーション経路計画を実行し得、計画された経路を候補経路としてユーザインターフェースに表示し得る。ナビゲーション経路間の切り替えを実行するためのユーザの指示を受信するとき、または第3の位置情報によって示される位置にターゲット車両があると決定するとき、ナビゲーションマップモジュールは、候補経路を更新されたナビゲーション経路として使用し、更新されたナビゲーション経路をユーザに表示する。
上記の方法の実施形態に基づき、本出願の実施形態はさらにナビゲーション装置を提供する。ナビゲーション装置は、図2のナビゲーションマップモジュールの機能を実装するように構成される。図10を参照すると、ナビゲーション装置1000は、トランシーバユニット1001および処理ユニット1002を含む。以下は、ナビゲーション装置1000が車両の移動ルートを計画するときにユニットの機能とユニット間の関係を説明する。
トランシーバユニット1001は、高精細マップモジュールによって送信されるターゲット車両の第1の位置情報を受信するように構成され、第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含む。
処理ユニット1002は、ターゲット車両の第1の位置情報および目的地に基づいてナビゲーション経路を決定するように構成される。
可能な設計では、第1の位置情報は、さらに、ターゲット車両が現在位置している第1の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。
可能な設計では、処理ユニット1002は:第1の位置情報およびターゲット車両の目的地に基づいて初期ナビゲーション経路を生成し;初期ナビゲーション経路の車線レベル道路情報に基づいてナビゲーション経路を決定する;ように構成される。
トランシーバユニット1001は、初期ナビゲーション経路を高精細マップモジュールに送信し;高精細マップモジュールによって返される初期ナビゲーション経路の車線レベル道路情報を受信する;ように構成され、初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路の車線レベル道路情報を含む。
可能な設計では、初期ナビゲーション経路の車線レベル道路情報は、さらに、初期ナビゲーション経路に対応する第2のプリセット周辺領域範囲における道路区間の車線レベル道路情報を含む。
可能な設計では、処理ユニット1002は、特に:初期ナビゲーション経路の車線レベル道路情報に基づいて、通行不能または迂回が推奨される道路または車線が初期ナビゲーション経路内に存在すると決定される場合、決定された通行不能または迂回が推奨される道路または車線、ならびに第1の位置情報およびターゲット車両の目的地に基づいて、ナビゲーション経路が更新された初期ナビゲーション経路であると決定するように構成される。
可能な設計では、初期ナビゲーション経路は:K個の候補経路を含み;処理ユニット1002は、特に、初期ナビゲーション経路の車線レベル道路情報に基づいて、K個の候補経路からナビゲーション経路を選択するように構成され、初期ナビゲーション経路の車線レベル道路情報は:第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線情報、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線利用可能情報、または第2のプリセット周辺領域範囲における初期ナビゲーション経路によってサポートされる運転モード情報のうち少なくとも1つを含む。
可能な設計では、トランシーバユニット1001は、特に:高精細マップモジュールによって送信されたターゲット車両の第2の位置情報を受信し、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含み;ナビゲーションマップモジュールのために、偏走確率情報を受信する、ように構成され、偏走確率情報は、ターゲット車両が第2の位置から移動し、その後ナビゲーション経路から逸脱する確率を示すために使用される。
処理ユニット1002は、特に:偏走確率情報に基づいて、ナビゲーション経路を更新することを決定し;第2の位置情報および目的地に基づいてナビゲーション経路を更新する、ように構成される。
可能な設計では、第2の位置情報は、さらに、ターゲット車両が現在位置している第2の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。
可能な設計では、トランシーバユニット1001は、さらに:高精細マップモジュールによって送信されたターゲット車両の第2の位置情報を受信し、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含み;偏走アラーム情報を受信するように、構成され、偏走アラーム情報は、第2の位置がナビゲーション経路にないことを示すために使用される。
処理ユニット1002は、さらに、第2の位置情報および目的地に基づいて、ナビゲーション経路を更新するように構成される。
可能な設計では、トランシーバユニット1001はさらに、高精細マップモジュールによって送信される第3の位置情報を受信するように構成され、第3の位置情報は、第3の位置の車線情報を含み、第3の位置は、第2の位置情報に基づいて高精細マップモジュールによって予測され、特定の期間後にターゲット車両が移動する可能性のある位置であり、第3の位置はナビゲーション経路にはない。
処理ユニット1002は、さらに、第2の位置情報、第3の位置情報、および目的地に基づいて、ナビゲーション経路を更新するように構成される。
上記の方法の実施形態に基づき、本出願の実施形態はさらにナビゲーション装置を提供する。ナビゲーション装置は、図2の高精細マップモジュールの機能を実装するように構成される。図10を参照すると、ナビゲーション装置1000は、トランシーバユニット1001および処理ユニット1002を含む。以下は、ナビゲーション装置1000が車両移動ルートを計画する際のユニットの機能とユニット間の関係を説明する。
処理ユニット1002は、ターゲット車両の位置情報に基づいて、ターゲット車両の第1の位置情報を生成するように構成され、第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含む。
トランシーバユニット1001は、ターゲット車両の第1の位置情報をナビゲーションマップモジュールに送信するように構成され、第1の位置情報は、ナビゲーション経路を決定するためにナビゲーションマップモジュールによって使用される。
可能な設計では、第1の位置情報は、さらに、ターゲット車両が現在位置している第1の位置の第1のプリセット周辺領域範囲における車線レベル道路情報を含む。
可能な設計では、トランシーバユニット1001は、さらに:ナビゲーションマップモジュールから初期ナビゲーション経路を受信し、初期ナビゲーション経路は、第1の位置情報および目的地に基づいてナビゲーションマップモジュールによって生成され;初期ナビゲーション経路の車線レベル道路情報をナビゲーションマップモジュールに送信する;ように構成される。
処理ユニット1002は、さらに、初期ナビゲーション経路に基づいて初期ナビゲーション経路の車線レベル道路情報を決定するように構成され、初期ナビゲーション経路の車線レベル道路情報は、初期ナビゲーション経路の道路区間の車線レベル道路情報を含む。
可能な設計では、初期ナビゲーション経路の車線レベル道路情報は:初期ナビゲーション経路において通行不能または迂回が推奨される道路または車線、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線情報、第2のプリセット周辺領域範囲における初期ナビゲーション経路の車線利用可能情報、または第2のプリセット周辺領域範囲における初期ナビゲーション経路によってサポートされる運転モード情報のうち少なくとも1つを含む。
可能な設計では、処理ユニット1002はさら:ターゲット車両の第2の位置情報を決定し、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含み;ナビゲーション経路および第2の位置情報に基づいてターゲット車両の偏走確率情報を決定する、ように構成され、偏走確率情報は、ターゲット車両が第2の位置から移動し、その後ナビゲーション経路から逸脱する確率を示すために使用される。
トランシーバユニット1001は、さらに:第2の位置情報をターゲット車両に送信し;偏走確率情報をナビゲーションマップモジュールに送信する、ように構成される。
可能な設計では、処理ユニット1002はさらに:ターゲット車両の第2の位置情報を決定し、第2の位置情報は、ターゲット車両が現在位置している第2の位置の車線情報を含み;ナビゲーション経路および第2の位置情報に基づいてターゲット車両の偏走アラーム情報を生成する、ように構成され、偏走アラーム情報は、第2の位置がナビゲーション経路にないことを示すために使用される。
トランシーバユニット1001は、さらに:第2の位置情報をターゲット車両に送信し;ナビゲーションマップモジュールに偏走アラーム情報を送信する、ように構成される。
可能な設計では、処理ユニット1002はさらに:ナビゲーション経路および第2の位置情報に基づいて第3の位置情報を生成するように構成され、第3の位置情報は第3の位置の車線情報を含み、第3の位置は第2の位置情報に基づいて高精細マップモジュールによって予測され、特定の期間後にターゲット車両が移動する可能性のある位置であり、第3の位置はナビゲーション経路にはない。
トランシーバユニット1001は、さらに、第3の位置情報をナビゲーションマップモジュールに送信するように構成される。
可能な設計では、第1の位置情報および第2の位置情報は:ターゲット車両の車両進行方向、ターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線情報、またはターゲット車両の現在位置の第1のプリセット周辺領域範囲における車線利用可能情報のうちの1つまたは複数を含み;第3の位置情報は:ターゲット車両の予測車両進行方向、ターゲット車両の予測位置の第1のプリセット周辺領域範囲の車線情報、またはターゲット車両の予測位置の第1プリセット周辺領域範囲における車線利用可能情報のうちの1つまたは複数を含む。
可能な設計では、車線情報は:車線の数量、車線の番号、車線方向情報、車線の始点と終点、車線変更点、車線曲率情報、車線勾配情報、または車線タイプのうちの1つまたは複数を含み;車線タイプは、幹線道路車線、側道車線、合流車線、ランプ車線、一方通行車線、双方向車線、または潮汐車線を含み得;車線利用可能情報は:車線が通行可能かどうかを示す情報、車線が迂回が推奨されることを示す情報、道路状況情報、または交通ルール情報のうち少なくとも1つを含む。
本出願の上記の実施形態におけるユニット分割は一例であり、単なる論理機能分割であり、実際の実装では他の分割であり得ることが留意されるべきである。加えて、本出願の本実施形態における機能ユニットは、1つの処理ユニットに統合される場合もあれば、物理的に単独で存在する場合もある。代替的には、2つ以上のユニットを1つのユニットに統合することもできる。上記のユニットの1つまたは複数は、ソフトウェア、ハードウェア、ファームウェア、またはそれらの組み合わせを使用することによって実装され得る。ソフトウェアまたはファームウェアは、コンピュータプログラムの命令またはコードを含むが、これらに限定されず、ハードウェアプロセッサによって実行され得る。ハードウェアには、さまざまな種類の集積回路、例えば、中央処理装置(CPU)、デジタルシグナルプロセッサ(DSP)、フィールドプログラマブルゲートアレイ(FPGA)、または特定用途向け集積回路(ASIC)を含むが、限定されるものではない。
統合ユニットがソフトウェア機能ユニットの形で実装され、独立した製品として販売または使用される場合、統合ユニットはコンピュータ可読記憶媒体に記憶され得る。このような理解に基づいて、本出願の技術的解決策は、本質的に、または先行技術に寄与する部分、または技術的解決策の全部または一部はソフトウェア製品の形で実装され得る。コンピュータソフトウェア製品は、記憶媒体に記憶され、コンピュータデバイス(パーソナルコンピュータ、サーバ、またはネットワークデバイスであり得る)またはプロセッサ(processor)に、本出願の実施形態に記載されている方法の全てまたは一部のステップを実行するよう指示するためのいくつかの命令を含む。上記の記憶媒体は:USBフラッシュドライブ、リムーバブルハードディスク、読み取り専用メモリ(Read-Only Memory、ROM)、ランダムアクセスメモリ(Random Access Memory、RAM)、磁気ディスク、光ディスクなど、プログラムコードを記憶できる任意の媒体を含む。
上記の実施形態に基づいて、本出願の一実施形態は、さらにナビゲーション装置を提供する。装置は、図2のナビゲーションマップモジュールの動作を完備することができるもしくは図2の高精細マップモジュールの動作を完備することができる、またはナビゲーション装置は、ナビゲーションマップモジュールおよび高精細マップモジュールの動作を完備することができる。図11を参照すると、装置1100は、通信インターフェース1101、プロセッサ1102、およびメモリ1103を含む。
通信インターフェース1101、メモリ1103、およびプロセッサ1102は互いに接続されている。オプションで、通信インターフェース1101、メモリ1103、およびプロセッサ1102はバスを使用することによって互いに接続され得る。このバスは、周辺機器相互接続(peripheral component interconnect、PCI)バス、拡張業界標準アーキテクチャ(extended industry standard architecture、EISA)バスなどであり得る。バスは、アドレスバス、データバス、コントロールバスなどに分類され得る。わかりやすくするために、図11のバスを表すために太い線が1つだけ使われているが、これは、バスが1つだけまたはバスの種類が1つだけであることを意味するものではない。
通信インターフェース1101は、ナビゲーション装置とナビゲーションシステムの他のコンポーネントとの間の通信を実現するように構成される。例えば、ナビゲーション装置がナビゲーションマップモジュールを含む場合、通信インターフェース1101は、高精細マップモジュールによって送信されるターゲット車両の第1の位置情報を受信するように構成され得、第1の位置情報は、ターゲット車両が現在位置している第1の位置の車線情報を含む。ナビゲーション装置が高精細マップモジュールを含む場合、通信インターフェース1101は:測位システムによって送信されるターゲット車両の測位結果を受信し;ターゲット車両の第1の位置情報をナビゲーションマップモジュールに送信するように構成され得、第1の位置情報は、ナビゲーション経路を決定するために、ナビゲーションマップモジュールによって使用される。
プロセッサ1102は、図3に示すナビゲーション解決策を実装するように構成される。詳細は図3の実施形態の説明を参照されたい。詳細はここでは再度説明しない。オプションで、プロセッサ1102は中央処理装置(central processing unit、CPU)または別のハードウェアチップであり得る。ハードウェアチップは、特定用途向け集積回路(application-specific integrated circuit、ASIC)、プログラマブルロジックデバイス(programmable logic device、PLD)、またはこれらの組み合わせであり得る。PLDは、複合プログラマブルロジックデバイス(complex programmable logic device、CPLD)、フィールドプログラマブルロジックゲートアレイ(field-programmable gate array、FPGA)、汎用アレイロジック(generic array logic、GAL)、またはこれらの任意の組み合わせであり得る。上記の機能を実装する場合、プロセッサ1102は、ハードウェアを使用することによって実装され得る、または、確かに、対応するソフトウェアを実行するハードウェアによって実装され得る。
メモリ1103は、プログラム命令、データなどを記憶するように構成される。具体的には、プログラム命令はプログラムコードを含み得、プログラムコードはコンピュータ操作のための命令を含む。メモリ1103は、ランダムアクセスメモリ(random access memory、RAM)を含み得る、または、不揮発性メモリ(non-volatile memory)、例えば、少なくとも1つの磁気ディスクメモリであり得る。プロセッサ1102は、メモリ1103に記憶されているプログラムを実行し、上記のコンポーネントを使用することによって上記の機能を実装し、それによって、最終的に上記の実施形態で提供されている方法を実装する。
上記の実施形態に基づいて、本出願の一実施形態はさらにナビゲーションシステムを提供する。ナビゲーションシステムは、高精細マップモジュールの機能を実装するように構成されたナビゲーション装置と、ナビゲーションマップモジュールの機能を実装するように構成されたナビゲーション装置とを含み得る。高精細マップモジュールの機能を実装するように構成されたナビゲーション装置およびナビゲーションマップモジュールの機能を実装するように構成されたナビゲーション装置は、汎用デバイスまたは専用デバイスであり得る。これは、本出願の本実施形態では特に限定されない。高精細マップモジュールおよびナビゲーションマップモジュールの関連機能は、1つのデバイスによって実装され得る、または、複数のデバイスによって一緒に実装され得る、または、1つのデバイス内の1つ以上の機能モジュールによって実装され得る。これは、本出願の本実施形態では特に限定されない。上記の機能は、ハードウェアデバイス内の要素であり得る、または専用のハードウェア上で動作するソフトウェア機能、ハードウェアとソフトウェアの組み合わせ、若しくはプラットフォーム(例えば、クラウドプラットフォーム)上でインスタンス化するための仮想化機能であり得ることが理解できる。
上記の実施形態に基づいて、本出願の一実施形態はさらにコンピュータプログラム製品を提供する。コンピュータプログラム製品をプロセッサ上で実行すると、ナビゲーション装置は、上記の実施形態で提供された可能な方法を実装することを可能にされる。
上記の実施形態に基づいて、本出願の一実施形態はさらにコンピュータ記憶媒体を提供する。コンピュータ記憶媒体は、コンピュータプログラムを記憶する。コンピュータプログラムがプロセッサによって実行されると、ナビゲーション装置は、上記の実施形態で提供された可能な方法を実装することを可能にされる。
上記の実施形態に基づいて、本出願の一実施形態はさらにチップを提供する。チップは、メモリに記憶されたコンピュータプログラムを読み取り、上記の実施形態で提供される方法を実装するように構成される。
上記の実施形態に基づいて、本出願の一実施形態はチップシステムを提供する。チップシステムは、プロセッサを含み、コンピュータ装置が上記の実施形態で提供される方法で端末装置に関連する機能を実装することをサポートするように構成される。可能な設計では、チップシステムはさらにメモリを含み、メモリはコンピュータ装置に必要なプログラムおよびデータを記憶するように構成される。チップシステムは、チップを含み得る、またはチップと別の個別のデバイスを含み得る。
当業者であれば、本出願で提供された実施形態の説明を相互参照してもよいことを明確に理解することができる。例えば、説明の便宜性や簡潔性のために、本出願の実施形態で提供されている装置およびデバイスの機能並びに装置およびデバイスによって実行されるステップについては、本出願の方法の実施形態の関連説明を参照されたい。方法の実施形態と装置の実施形態との間で相互参照を行うこともできる。
当業者は、方法の実施形態のステップの全部または一部が関連ハードウェアに指示するプログラムによって実装され得ることを理解することができる。プログラムはコンピュータ可読記憶媒体に記憶され得る。プログラムを実行すると、方法の実施形態のステップの全部または一部が実行される。上記の記憶媒体は、ROM、RAM、磁気ディスク、光ディスクなど、プログラムコードを記憶できる任意の媒体を含む。
上記の実施形態の全部または一部は、ソフトウェア、ハードウェア、ファームウェア、またはそれらの任意の組み合わせを使用することによって実装され得る。ソフトウェアが実施形態を実装するために使用される場合、実施形態は、コンピュータプログラム製品の形で全てまたは部分的に実装され得る。コンピュータプログラム製品は、1つ以上のコンピュータ命令を含む。コンピュータプログラム命令がコンピュータにロードされて実行されると、本発明の実施形態による手順または機能が全てまたは部分的に生成される。コンピュータは、汎用コンピュータ、特殊用途コンピュータ、コンピュータネットワーク、または別のプログラム可能な装置であり得る。コンピュータ命令は、コンピュータ可読記憶媒体に記憶され得る、または、コンピュータ可読記憶媒体から別のコンピュータが可読記憶媒体に送信され得る。例えば、コンピュータ命令は、Webサイト、コンピュータ、サーバ、またはデータセンタから別のWebサイト、コンピュータ、サーバ、またはデータセンタに有線(例えば、同軸ケーブル、光ファイバ、デジタル加入者線(DSL)など)またはワイヤレス(赤外線、ラジオ、マイクロ波など)で送信され得る。コンピュータ可読記憶媒体は、コンピュータによってアクセス可能な任意の使用可能な媒体、または1つ以上の使用可能な媒体を統合したサーバやデータセンタなどのデータ記憶装置であり得る。使用可能な媒体は、磁気媒体(例えば、フロッピー(登録商標)ディスク、ハードディスク、磁気テープなど)、光媒体(例えばDVD)、半導体媒体(例えば、ソリッドステートドライブ(Solid State Disk、SSD))等であり得る。
本出願で提供されるいくつかの実施形態では、開示された装置及び方法は、本出願の範囲から逸脱することなく、他の方法で実装され得ることが理解されるべきである。例えば、説明した実施形態は単なる一例に過ぎない。例えば、モジュールまたはユニットの分割は単なる論理機能の分割であり得、実際の実装では他の分割になり得る。例えば、複数のユニットまたはコンポーネントは、別のシステムに組み合わされる若しくは統合されてもよく、またはいくつかの機能は無視されるまたは実行されなくてもよい。別々のパーツとして記述されているユニットは物理的に分かれていてもそうでなくてもよく、ユニットとして表示されているパーツは物理的なユニットであってもそうでなくてもよい、つまり1つの位置にあってもよく、または複数のネットワークユニットに分散されてもよい。いくつかまたはすべてのモジュールは、実施形態の解決策の目的を達成するために、実際の要件に従って選択され得る。当業者は、創造的努力なしに本発明の実施形態を理解し、実施することができる。
加えて、異なる実施形態に記述された装置、方法、および概略図は、本出願の範囲を逸脱することなく、別のシステム、モジュール、技術、または方法と組み合わされ得るまたは統合され得る。加えて、表示または議論されている相互結合または直接結合または通信接続は、いくつかのインターフェースを介して実装され得る。装置またはユニット間の間接結合または通信接続は、電気的、機械的、またはその他の形態で実装され得る。
上記の説明は、本出願の特定の実装にすぎないが、本出願の保護範囲を限定することを意図するものではない。本出願に開示されている技術的範囲内で当業者が容易に把握できるバリエーションまたは置換は、本出願の保護範囲に含まれるものとする。したがって、本出願の保護範囲は、請求項の保護範囲に従うものとする。