JP7409013B2 - 動力工具 - Google Patents
動力工具 Download PDFInfo
- Publication number
- JP7409013B2 JP7409013B2 JP2019198509A JP2019198509A JP7409013B2 JP 7409013 B2 JP7409013 B2 JP 7409013B2 JP 2019198509 A JP2019198509 A JP 2019198509A JP 2019198509 A JP2019198509 A JP 2019198509A JP 7409013 B2 JP7409013 B2 JP 7409013B2
- Authority
- JP
- Japan
- Prior art keywords
- base
- housing
- cylindrical portion
- rack
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 60
- 230000003028 elevating effect Effects 0.000 claims description 42
- 230000001105 regulatory effect Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 32
- 230000008569 process Effects 0.000 description 31
- 238000001514 detection method Methods 0.000 description 12
- 238000005520 cutting process Methods 0.000 description 9
- 230000007704 transition Effects 0.000 description 7
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 230000006872 improvement Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000005304 joining Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000004323 axial length Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images












Landscapes
- Milling, Drilling, And Turning Of Wood (AREA)
Description
本発明の1又はそれ以上の実施形態は、前記操作部は、作業者の操作によって回転する回転部材として構成されており、前記操作部の回転が前記係合部に伝達されることで、前記ベースが前記ハウジングに対して昇降する動力工具である。
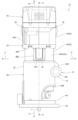
図1~図8に示されるように、トリマ本体20は、ハウジング22と、モータ34と、操作部としてのトリガ42と、表示部としての速度設定ダイヤル46と、ロックボタン52と、を含んで構成されている。
ハウジング22は、トリマ本体20の外郭を構成している。ハウジング22は、2重構造を成している。具体的には、ハウジング22は、ハウジング22の内周側部分を構成する内側ハウジング24と、ハウジング22の外周側部分を構成する外側ハウジング30と、を含んで構成されている(図8参照)。
図6及び図7に示されるように、モータ34は、ブラシレスモータとして構成されている。モータ34は、内側ハウジング24の内筒24B内において内筒24Bと同軸上に配置されて、内筒24Bに固定されている。モータ34の出力軸34Aの上端部は、内筒24Bに設けられた第1軸受36によって回転可能に支持され、出力軸34Aの下端側の部分が、内筒24Bに設けられた第2軸受38によって回転可能に支持されており、出力軸34Aの下端部(先端部)が、ハウジング22の下端部よりも下側へ突出している。また、出力軸34Aの下端部には、コレクトチャック40が設けられており、コレクトチャック40によって工具Tが着脱可能に固定されている。さらに、モータ34は、後述する制御部90に電気的に接続されており、制御部90の制御によってモータ34が駆動する構成になっている。これにより、出力軸34Aと共に回転する工具Tによって被切削材に切削加工を施すようになっている。
図1~図3、図5、及び図6に示されるように、トリガ42は、モータ34を駆動又は停止させるための操作部として構成されている。トリガ42は、内側ハウジング24のトリガ取付部24Cに取付けられて、ハウジング22から第1方向一方側へ操作可能に露出されている。つまり、トリガ42が、内側ハウジング24の第1分割ハウジング26と第2分割ハウジング28との合わせ部に設けられている。また、トリガ42の上端部が、第2方向を軸方向として内側ハウジング24に回転可能に支持されている。これにより、トリガ42が、初期位置(図6において実線にて示される位置)と、第2方向一方側から見て初期位置から反時計回りに回転した操作位置(図6において2点鎖線にて示される位置)と、の間を回転操作可能に構成されている。なお、トリガ42は、図示しない付勢バネによって初期位置側へ付勢されており、トリガ42の非操作状態では、トリガ42が初期位置に保持されている。
図4~図6に示されるように、速度設定ダイヤル46は、モータ34の回転速度を変更するためのダイヤルとして構成されている。つまり、速度設定ダイヤル46は、第2の操作部としても構成されている。速度設定ダイヤル46は、上下方向を板厚方向とした略円板状に形成されている。そして、速度設定ダイヤル46が、上下方向を軸方向として内側ハウジング24に回転可能に支持されると共に、内側ハウジング24のダイヤル取付部24Dから第1方向他方側へ操作可能に露出されている。これにより、速度設定ダイヤル46が、トリガ42に対して外筒30Aの周方向に180度離間して配置されて、内側ハウジング24の第1分割ハウジング26と第2分割ハウジング28との合わせ部に設けられている。
図4及び図6に示されるように、ロックボタン52は、速度設定ダイヤル46の上側に配置されて、内側ハウジング24におけるアッパーハウジング部24Aに操作可能に設けられている。すなわち、ロックボタン52は、内側ハウジング24の第1分割ハウジング26と第2分割ハウジング28との合わせ部に設けられている。さらに、前述した第1ラック72及び第2ラック74が、筒部22Aの周方向において、トリガ42と速度設定ダイヤル46及びロックボタン52との間に配置されている。具体的には、トリガ42、第1ラック72、速度設定ダイヤル46及びロックボタン52、第2ラック74が、ハウジング22の筒部22Aの周方向一方(図1の矢印G方向側)へこの順に並んで配置されると共に、90度毎に離間して配置されている。ロックボタン52は、第1方向他方側から見て、略矩形状に形成されると共に、弾性を有する部材によって構成されている。
図1~図7に示されるように、ベース60は、金属製とされると共に、上側へ開放された略有底筒状に形成されている。具体的には、ベース60は、ベース本体62と、ベース60の下端部を構成するプレート部64と、を含んで構成されている。
図1及び図2に示されるように、バッテリー58は、略直方体に形成されている。そして、バッテリー58が、ハウジング22のバッテリー取付部24Eに、第1方向他方側から装着されている。バッテリー58は、図示しないコネクタを有しており、バッテリー58のバッテリー取付部24Eへの装着状態では、当該コネクタがコネクタ32に接続されて、バッテリー58から制御部90へ電力が供給される構成になっている。また、バッテリー58は、一対のロック部材58Aを有しており、ロック部材58Aは、バッテリー58の第2方向一方側及び他方側の側部に設けられている。そして、バッテリー58のバッテリー取付部24Eへの装着状態では、ロック部材58Aがハウジング22のアッパーハウジング部24Aに係合して、バッテリー58の第1方向他方側への移動が制限されている。
図1~図5、及び図7に示されるように、昇降機構70は、前述したハウジング22に形成された第1ラック72及び第2ラック74と、固定部材76と、を含んで構成されている。
コントローラ100は、ハウジング22のアッパーハウジング部24Aの内部に収容されて、アッパーハウジング部24Aに固定されている。コントローラ100は、後述するインバータ部110と制御部90を有する。コントローラ100には、前述したコネクタ32、モータ34、マイクロスイッチ44、エンコーダ48、タクトスイッチ56が電気的に接続されている。そして、トリガ42及びロックボタン52の操作に応じて、制御部90が、モータ34に対する作動を制御する構成になっている。また、速度設定ダイヤル46の回転位置に応じて、制御部90が、モータ34の回転速度を制御する構成になっている。
図9の機能(回路)ブロック図を用いて、電動トリマ10の電気的構成について説明する。
コントローラ100は、図示しない制御回路基板を有し、当該制御回路基板には、インバータ部110と制御部90とが搭載される。制御部90は、演算部91を有し、演算部91は、インバータ部110の駆動制御等の各種制御を行う。演算部91はマイコンである。インバータ部110は、スイッチング素子110a(ここでは6つ)をブリッジ接続した回路である。検出抵抗120は、モータ34としてのブラシレスモータの駆動電流の経路に設けられている。制御回路電圧供給回路130は、バッテリー58の電圧を制御部90の動作に適した電圧に変換して制御部90に供給する。磁気センサ107は、例えばホール素子であり、モータ34としてのブラシレスモータの回転位置に応じた信号を出力する。
次に、図10に示されるフローチャートを用いて、電動トリマ10の動作について説明する。
次に、ベース60をハウジング22へ組付ける組付手順を説明しつつ、本実施の形態の電動トリマ10の作用効果について説明する。
22 ハウジング
22A 筒部
34 モータ
34A 出力軸
42 トリガ(操作部)
46 速度設定ダイヤル(表示部)
60 ベース
70 昇降機構
72 第1ラック(ラック、係合部)
74 第2ラック(ラック、係合部)
82 ピニオン(被係合部、回転部材)
170 回転部材(被係合部)
172 ナット(係合部)
T 工具
Claims (9)
- 筒部を有するハウジングと、
前記ハウジングの内部に収容され、先端部が前記筒部の軸方向一方側へ突出した出力軸を有し、前記出力軸の先端部において工具が着脱可能に固定されるモータと、
前記筒部に外挿されたベースと、
前記ベースと前記ハウジングとに接続されると共に、作動することで前記ベースを前記筒部の軸方向に昇降させる昇降機構と、
を備え、
前記昇降機構は、前記ハウジング及び前記ベースの一方に形成されて操作部と係合する係合部と、前記ハウジング及び前記ベースの他方において動作可能に支持されて作業者が操作可能な前記操作部と、を含み、
前記係合部は前記筒部の周方向で複数設けられ、
前記操作部は複数の前記係合部のうちいずれか1つと係合可能に構成されると共に、前記ベースは前記操作部と係合する前記係合部の位置に応じて前記ハウジングに対する前記軸方向を軸とした回転位置が変更され、
前記昇降機構は、前記係合部と係合した状態の前記操作部が作業者によって操作されることで、前記操作部が前記ハウジングと前記ベースの他方において作動し、前記ベースを前記筒部に対して前記軸方向に昇降させることが可能なように構成される動力工具。 - 筒部を有するハウジングと、
前記ハウジングの内部に収容され、先端部が前記筒部の軸方向一方側へ突出した出力軸を有し、前記出力軸の先端部において工具が着脱可能に固定されるモータと、
前記筒部に外挿されたベースと、
前記ベースと前記ハウジングとに接続されると共に、作動することで前記ベースを前記筒部の軸方向に昇降させる昇降機構と、
を備え、
前記昇降機構は、
前記筒部及び前記ベースの一方に形成され、前記筒部の軸方向に延在されたラックと、
前記筒部及び前記ベースの他方に設けられ、前記ラックと噛合されたピニオンと、
を含んで構成されており、
前記筒部の周方向に沿った前記ラックの全長が、前記ピニオンの幅長さの2倍以上に設定されている動力工具。 - 前記ラックが前記筒部の周方向において複数形成されている請求項2に記載の動力工具。
- 前記昇降機構によって、前記筒部の周方向における前記ベースの前記ハウジングに対する相対回転が規制されている請求項1~請求項3の何れか1項に記載の動力工具。
- 前記筒部には、前記モータを駆動又は停止させるための操作部が設けられている請求項1~請求項4の何れか1項に記載の動力工具。
- 前記筒部には、表示部が設けられている請求項1~請求項4の何れか1項に記載の動力工具。
- 筒部を有するハウジングと、
前記ハウジングの内部に収容され、先端部が前記筒部の軸方向一方側へ突出した出力軸を有し、前記出力軸の先端部において工具が着脱可能に固定されるモータと、
前記筒部に外挿されたベースと、
前記ベースと前記ハウジングとに接続されると共に、作動することで前記ベースを前記筒部の軸方向に昇降させる昇降機構と、
を備え、
前記昇降機構は、
前記筒部及び前記ベースの一方に形成された係合部と、
前記筒部及び前記ベースの他方に動作可能に設けられると共に、作業者によって操作可能であって前記係合部と係合する被係合部と、
を含んで構成されており、
前記被係合部が、前記筒部の周方向に複数設けられており、
前記係合部が複数の前記被係合部のうちいずれか1つと係合可能に構成されると共に、前記ベースは前記係合部と係合する前記被係合部の位置に応じて前記ハウジングに対する前記軸方向を軸とした回転位置が変更され、
前記昇降機構は、前記係合部と係合した状態の前記被係合部が作業者によって操作されることで、前記被係合部が前記ハウジングと前記ベースの他方において作動し、前記ベースを前記筒部に対して前記軸方向に昇降させることが可能なように構成される動力工具。 - 前記被係合部は、作業者の操作によって回転する回転部材として構成されており、
前記被係合部の回転が前記係合部に伝達されることで、前記ベースが前記ハウジングに対して昇降する請求項7に記載の動力工具。 - 前記操作部は、作業者の操作によって回転する回転部材として構成されており、
前記操作部の回転が前記係合部に伝達されることで、前記ベースが前記ハウジングに対して昇降する請求項1に記載の動力工具。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019198509A JP7409013B2 (ja) | 2019-10-31 | 2019-10-31 | 動力工具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019198509A JP7409013B2 (ja) | 2019-10-31 | 2019-10-31 | 動力工具 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021070105A JP2021070105A (ja) | 2021-05-06 |
| JP2021070105A5 JP2021070105A5 (ja) | 2022-09-28 |
| JP7409013B2 true JP7409013B2 (ja) | 2024-01-09 |
Family
ID=75713533
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019198509A Active JP7409013B2 (ja) | 2019-10-31 | 2019-10-31 | 動力工具 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7409013B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008073988A (ja) | 2006-09-22 | 2008-04-03 | Ryobi Ltd | 切削工具の切り込み深さ調整機構 |
| JP2018167763A (ja) | 2017-03-30 | 2018-11-01 | 株式会社ニフコ | ロック装置 |
-
2019
- 2019-10-31 JP JP2019198509A patent/JP7409013B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008073988A (ja) | 2006-09-22 | 2008-04-03 | Ryobi Ltd | 切削工具の切り込み深さ調整機構 |
| JP2018167763A (ja) | 2017-03-30 | 2018-11-01 | 株式会社ニフコ | ロック装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021070105A (ja) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11192270B2 (en) | Portable cutting tool | |
| US6506006B2 (en) | Power hand tool having a detachable handle | |
| CN106964836B (zh) | 切割机 | |
| KR20130095619A (ko) | 탱리스 나선형상 코일 인서트 삽입공구 | |
| US7261166B2 (en) | Switch for power tool | |
| JP7409013B2 (ja) | 動力工具 | |
| US8312936B2 (en) | Lockout apparatus for protecting an attachment device mounted on rotary power tools | |
| US8327551B2 (en) | Attachment interface for rotary hand tools | |
| JP7451941B2 (ja) | 動力工具 | |
| KR101917321B1 (ko) | 로봇용 수동 툴 체인저 | |
| WO2021070597A1 (ja) | 電動工具 | |
| JP5463907B2 (ja) | 電動工具 | |
| JP2001293672A (ja) | 充電式電動工具 | |
| JP4860236B2 (ja) | 切断機 | |
| JP2015116626A (ja) | コードレス電動工具 | |
| WO2021070596A1 (ja) | 電動工具 | |
| US20240001581A1 (en) | Work machine | |
| EP4227042A1 (en) | Power tool | |
| JP2022072882A (ja) | 作業機 | |
| JP7309510B2 (ja) | 卓上切断機 | |
| JP4458947B2 (ja) | 回転刃装置 | |
| JP2011045953A (ja) | 電動工具 | |
| JP2541084Y2 (ja) | 電池式電動工具 | |
| JPWO2022091966A5 (ja) | ||
| JP2022086050A (ja) | 作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220916 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220916 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230704 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230829 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7409013 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |