JP7368130B2 - 作業機械および作業機械の制御方法 - Google Patents
作業機械および作業機械の制御方法 Download PDFInfo
- Publication number
- JP7368130B2 JP7368130B2 JP2019134035A JP2019134035A JP7368130B2 JP 7368130 B2 JP7368130 B2 JP 7368130B2 JP 2019134035 A JP2019134035 A JP 2019134035A JP 2019134035 A JP2019134035 A JP 2019134035A JP 7368130 B2 JP7368130 B2 JP 7368130B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- relief
- work machine
- hydraulic
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 27
- 238000009412 basement excavation Methods 0.000 claims description 66
- 239000010720 hydraulic oil Substances 0.000 claims description 50
- 238000001514 detection method Methods 0.000 claims description 17
- 239000012530 fluid Substances 0.000 claims description 9
- 238000010521 absorption reaction Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 230000007257 malfunction Effects 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/437—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like providing automatic sequences of movements, e.g. linear excavation, keeping dipper angle constant
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/425—Drive systems for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2246—Control of prime movers, e.g. depending on the hydraulic load of work tools
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2289—Closed circuit
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/264—Sensors and their calibration for indicating the position of the work tool
- E02F9/265—Sensors and their calibration for indicating the position of the work tool with follow-up actions (e.g. control signals sent to actuate the work tool)
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/024—Pressure relief valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B19/00—Testing; Calibrating; Fault detection or monitoring; Simulation or modelling of fluid-pressure systems or apparatus not otherwise provided for
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
- F15B11/165—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load for adjusting the pump output or bypass in response to demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20507—Type of prime mover
- F15B2211/20523—Internal combustion engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/505—Pressure control characterised by the type of pressure control means
- F15B2211/50509—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means
- F15B2211/50536—Pressure control characterised by the type of pressure control means the pressure control means controlling a pressure upstream of the pressure control means using unloading valves controlling the supply pressure by diverting fluid to the return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/52—Pressure control characterised by the type of actuation
- F15B2211/526—Pressure control characterised by the type of actuation electrically or electronically
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6336—Electronic controllers using input signals representing a state of the output member, e.g. position, speed or acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6651—Control of the prime mover, e.g. control of the output torque or rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6653—Pressure control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/75—Control of speed of the output member
Description
図1は、実施形態に基づく作業機械100の外観図である。
車両本体1は、旋回体3と、運転室4と、走行装置5とを有する。
〔制御系の構成〕
図2は、実施形態に基づく作業機械100の制御系の構成を説明する図である。
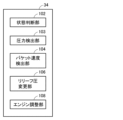
図4は、実施形態に従うポンプコントローラ34の制御フローを説明する図である。
自動掘削モード中に障害物(例えば岩など)に衝突して瞬間的にバケット8の速度が0になったり、作動油の圧力が所定値以上になる可能性がある。その場合に、リリーフ圧変更部106は、リリーフ弁44のリリーフ圧を第1の設定圧よりも高い第2の設定圧に変更する可能性がある。
具体的には、リリーフ圧変更部106は、誤動作を防止するために掘削負荷の高い状態が所定期間継続するか否かを条件に加える。
上記の実施形態においては、掘削負荷の高い自動掘削の制御を実行する場合に、リリーフ弁44のリリーフ圧を第1の設定圧から第2の設定圧に変更することにより油圧回路内の作動油の圧力を高めて作業機2の出力を上昇(パワーアップ)させる場合について説明した。この点で、リリーフ圧変更部106は、リリーフ弁44のリリーフ圧を第1の設定圧よりも高い第2の設定圧に変更するとともに、エンジン調整部108にエンジンの回転数を調整するように指示する。
Claims (13)
- 作業機と、
作動油によって前記作業機を動作させる油圧シリンダと、
油圧回路を介して前記油圧シリンダに前記作動油を供給する油圧ポンプと、
前記油圧回路のリリーフ圧を、第1の設定圧および前記第1の設定圧よりも高い第2の設定圧のいずれかに設定可能なリリーフ弁と、
前記作業機の制御状態が掘削状態か否かを判断する状態判断部と、
前記油圧回路の前記作動油の圧力および前記作業機の速度を検出する検出部と、
前記作業機の制御状態が掘削状態である場合に、前記油圧回路の前記作動油の圧力および前記作業機の速度の検出値に基づいて前記リリーフ弁のリリーフ圧を前記第1の設定圧から前記第2の設定圧に変更するリリーフ圧変更部とを備える、作業機械。 - 前記油圧ポンプは、エンジンによって駆動され、
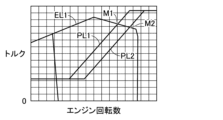
前記圧力検出部によって検出された前記作動油の圧力が所定値よりも大きい場合には、前記エンジンの回転数を増大させるエンジン調整部をさらに備える、請求項1記載の作業機械。 - 前記リリーフ圧変更部は、前記リリーフ弁のリリーフ圧を前記第2の設定圧に変更後、所定時間経過後に前記第1の設定圧に変更する、請求項1記載の作業機械。
- 前記リリーフ圧変更部は、前記リリーフ弁のリリーフ圧を前記第2の設定圧に変更後、前記作業機の制御状態が掘削状態でない場合に、前記第1の設定圧に変更する、請求項1記載の作業機械。
- 前記作業機は、バケットを有し、
前記リリーフ圧変更部は、前記作業機の制御状態が掘削状態であり、前記油圧回路の前記作動油の圧力が所定期間の間、所定値以上および前記バケットの速度が所定期間の間、所定速度以下である場合に前記リリーフ弁のリリーフ圧を前記第1の設定圧から前記第2の設定圧に変更する、請求項1記載の作業機械。 - 前記検出部は、前記油圧回路の前記作動油の圧力および前記作業機の速度の少なくとも一方の検出値を移動平均処理して出力するフィルタ回路を含む、請求項1記載の作業機械。
- 作業機と、
作動油によって前記作業機を動作させる油圧シリンダと、
油圧回路を介して前記油圧シリンダに前記作動油を供給する油圧ポンプと、
前記油圧回路のリリーフ圧を、第1の設定圧および前記第1の設定圧よりも高い第2の設定圧のいずれかに設定可能なリリーフ弁と、
前記作業機の制御状態が掘削状態か否かを判断する状態判断部と、
前記油圧回路の前記作動油の圧力および前記作業機の速度を検出する検出部と、
前記作業機の制御状態が掘削状態である場合に、前記油圧回路の前記作動油の圧力および前記作業機の速度の検出値に基づいて前記リリーフ弁のリリーフ圧を前記第1の設定圧から前記第2の設定圧に変更するリリーフ圧変更部とを備え、
前記作業機は、バケットを有し、
前記リリーフ圧変更部は、前記リリーフ弁のリリーフ圧を前記第2の設定圧に変更後、前記油圧回路の前記作動油の圧力が所定値未満および前記バケットの速度が所定速度より大きい速度の少なくとも一方である場合に前記第1の設定圧に変更する、作業機械。 - 前記リリーフ圧変更部は、前記リリーフ弁のリリーフ圧を前記第2の設定圧に変更後、前記油圧回路の前記作動油の圧力が所定値未満および前記バケットの速度が所定速度より大きい速度である状態が所定期間以上継続した場合に前記第1の設定圧に変更する、請求項7記載の作業機械。
- 作業機と、
作動油によって前記作業機を動作させる油圧シリンダと、
油圧回路を介して前記油圧シリンダに前記作動油を供給する油圧ポンプと、
前記油圧回路のリリーフ圧を、第1の設定圧および前記第1の設定圧よりも高い第2の設定圧のいずれかに設定可能なリリーフ弁と、
前記作業機の制御状態が掘削状態か否かを判断する状態判断部と、
前記油圧回路の前記作動油の圧力および前記作業機の速度を検出する検出部と、
前記作業機の制御状態が掘削状態である場合に、前記油圧回路の前記作動油の圧力および前記作業機の速度の検出値に基づいて前記リリーフ弁のリリーフ圧を前記第1の設定圧から前記第2の設定圧に変更するリリーフ圧変更部とを備え、
前記作業機は、バケットを有し、
リリーフ圧変更部は、前記作業機の制御状態が掘削状態であり、前記油圧回路の前記作
動油の圧力が所定値以上および前記バケットの速度が所定速度以下である場合に前記リリーフ弁のリリーフ圧を前記第1の設定圧から前記第2の設定圧に変更する、作業機械。 - 前記作業機の制御状態は、自動掘削状態である、請求項1~9のいずれか1項に記載の作業機械。
- 作業機の制御状態が掘削状態であるか否かを判断するステップと、
前記作業機の制御状態が掘削状態である場合に前記作業機を動作させる油圧シリンダに油圧回路を介して供給される作動油の圧力および前記作業機の速度を検出するステップと、
前記油圧回路の前記作動油の圧力および前記作業機の速度の検出値に基づいて前記油圧回路のリリーフ弁のリリーフ圧を第1の設定圧から前記第1の設定圧よりも高い第2の設定圧に変更するステップとを備える、作業機械の制御方法。 - バケットを有する作業機の制御状態が掘削状態であるか否かを判断するステップと、
前記作業機の制御状態が掘削状態である場合に前記作業機を動作させる油圧シリンダに油圧回路を介して供給される作動油の圧力および前記作業機の速度を検出するステップと、
前記油圧回路の前記作動油の圧力および前記作業機の速度の検出値に基づいて前記油圧回路のリリーフ弁のリリーフ圧を第1の設定圧から前記第1の設定圧よりも高い第2の設定圧に変更するステップと、
前記リリーフ弁のリリーフ圧を前記第2の設定圧に変更後、前記油圧回路の前記作動油の圧力が所定値未満および前記バケットの速度が所定速度より大きい速度の少なくとも一方である場合に前記第1の設定圧に変更するステップとを備える、作業機械の制御方法。 - バケットを有する作業機の制御状態が掘削状態であるか否かを判断するステップと、
前記作業機の制御状態が掘削状態である場合に前記作業機を動作させる油圧シリンダに油圧回路を介して供給される作動油の圧力および前記作業機の速度を検出するステップと、
前記作業機の制御状態が掘削状態であり、前記油圧回路の前記作動油の圧力が所定値以上および前記バケットの速度が所定速度以下である場合に前記油圧回路のリリーフ弁のリリーフ圧を第1の設定圧から前記第1の設定圧よりも高い第2の設定圧に変更するステップとを備える、作業機械の制御方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019134035A JP7368130B2 (ja) | 2019-07-19 | 2019-07-19 | 作業機械および作業機械の制御方法 |
| CN202080045084.4A CN114008275B (zh) | 2019-07-19 | 2020-06-30 | 作业机械以及作业机械的控制方法 |
| PCT/JP2020/025654 WO2021014900A1 (ja) | 2019-07-19 | 2020-06-30 | 作業機械および作業機械の制御方法 |
| US17/618,954 US20220316174A1 (en) | 2019-07-19 | 2020-06-30 | Work machine and method for controlling the same |
| KR1020217040452A KR102641393B1 (ko) | 2019-07-19 | 2020-06-30 | 작업 기계 및 작업 기계의 제어 방법 |
| DE112020002415.6T DE112020002415T5 (de) | 2019-07-19 | 2020-06-30 | Arbeitsmaschine und Verfahren zur Steuerung derselben |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019134035A JP7368130B2 (ja) | 2019-07-19 | 2019-07-19 | 作業機械および作業機械の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021017737A JP2021017737A (ja) | 2021-02-15 |
| JP7368130B2 true JP7368130B2 (ja) | 2023-10-24 |
Family
ID=74193774
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019134035A Active JP7368130B2 (ja) | 2019-07-19 | 2019-07-19 | 作業機械および作業機械の制御方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220316174A1 (ja) |
| JP (1) | JP7368130B2 (ja) |
| KR (1) | KR102641393B1 (ja) |
| CN (1) | CN114008275B (ja) |
| DE (1) | DE112020002415T5 (ja) |
| WO (1) | WO2021014900A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230097563A1 (en) * | 2021-09-28 | 2023-03-30 | Deere & Company | System and method for blade control on a utility vehicle |
| WO2024071220A1 (ja) * | 2022-09-30 | 2024-04-04 | 日立建機株式会社 | ホイールローダ |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004190749A (ja) | 2002-12-10 | 2004-07-08 | Shin Caterpillar Mitsubishi Ltd | 作業機械の自動昇圧装置 |
| JP2010156134A (ja) | 2008-12-26 | 2010-07-15 | Komatsu Ltd | 作業車両および作業車両の制御方法 |
| JP2011157789A (ja) | 2010-02-03 | 2011-08-18 | Sumitomo Heavy Ind Ltd | 建設機械 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1136376A (ja) * | 1997-07-17 | 1999-02-09 | Komatsu Ltd | 作業機における旋回起動制御装置 |
| JP3555733B2 (ja) * | 1998-02-27 | 2004-08-18 | コベルコ建機株式会社 | 油圧ショベルの昇圧制御方法及び同装置 |
| JPH11336585A (ja) * | 1998-05-27 | 1999-12-07 | Hitachi Constr Mach Co Ltd | 油圧パワーステアリング装置を有する車両 |
| JP3779488B2 (ja) * | 1999-04-08 | 2006-05-31 | 日立建機株式会社 | 建設機械の油圧駆動装置 |
| CN101761105B (zh) * | 2009-11-19 | 2011-08-17 | 龙工(上海)机械制造有限公司 | 一种液压挖掘机的功率匹配方法 |
| US9175456B2 (en) * | 2010-06-22 | 2015-11-03 | Hitachi Construction Machinery Co., Ltd. | Hydraulic control device for working vehicle |
| JP2012086617A (ja) * | 2010-10-18 | 2012-05-10 | Caterpillar Japan Ltd | アーティキュレート車両における小旋回制御装置 |
| EP2667059B1 (en) * | 2012-03-30 | 2016-06-01 | Komatsu, Ltd. | Wheel loader and method for controlling wheel loader |
| JP6691482B2 (ja) * | 2016-02-08 | 2020-04-28 | 株式会社小松製作所 | 作業車両および動作制御方法 |
| JP6621431B2 (ja) * | 2017-03-06 | 2019-12-18 | 日立建機株式会社 | 油圧ショベルの油圧駆動装置 |
-
2019
- 2019-07-19 JP JP2019134035A patent/JP7368130B2/ja active Active
-
2020
- 2020-06-30 KR KR1020217040452A patent/KR102641393B1/ko active IP Right Grant
- 2020-06-30 DE DE112020002415.6T patent/DE112020002415T5/de active Pending
- 2020-06-30 CN CN202080045084.4A patent/CN114008275B/zh active Active
- 2020-06-30 US US17/618,954 patent/US20220316174A1/en active Pending
- 2020-06-30 WO PCT/JP2020/025654 patent/WO2021014900A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004190749A (ja) | 2002-12-10 | 2004-07-08 | Shin Caterpillar Mitsubishi Ltd | 作業機械の自動昇圧装置 |
| JP2010156134A (ja) | 2008-12-26 | 2010-07-15 | Komatsu Ltd | 作業車両および作業車両の制御方法 |
| JP2011157789A (ja) | 2010-02-03 | 2011-08-18 | Sumitomo Heavy Ind Ltd | 建設機械 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112020002415T5 (de) | 2022-02-24 |
| CN114008275A (zh) | 2022-02-01 |
| KR102641393B1 (ko) | 2024-02-27 |
| US20220316174A1 (en) | 2022-10-06 |
| KR20220007144A (ko) | 2022-01-18 |
| WO2021014900A1 (ja) | 2021-01-28 |
| CN114008275B (zh) | 2024-03-08 |
| JP2021017737A (ja) | 2021-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107306500B (zh) | 作业机械的控制装置、作业机械以及作业机械的控制方法 | |
| CN103906877A (zh) | 推土铲控制装置、作业机械及推土铲控制方法 | |
| WO2016133225A1 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| US20130158818A1 (en) | Implement control system for a machine | |
| WO2012071114A1 (en) | Implement induced maching pitch detection | |
| JP7368130B2 (ja) | 作業機械および作業機械の制御方法 | |
| WO2013051377A1 (ja) | ブレード制御システム、建設機械及びブレード制御方法 | |
| EP3289143B1 (en) | Ride control system for power machine | |
| AU2014263098A1 (en) | System and method for re-directing a ripping path | |
| JP2018115461A (ja) | 建設機械 | |
| JP7217691B2 (ja) | 建設機械 | |
| JP6691482B2 (ja) | 作業車両および動作制御方法 | |
| JP7193419B2 (ja) | 建設機械 | |
| CN113924396B (zh) | 作业机械及作业机械的控制方法 | |
| JP6901406B2 (ja) | 作業機械および作業機械の制御方法 | |
| KR20220044440A (ko) | 쇼벨 | |
| JP6876623B2 (ja) | 作業機械および作業機械の制御方法 | |
| US11608610B2 (en) | Control of a hydraulic system | |
| US20170044737A1 (en) | Recovering energy from hydraulic system of a machine | |
| JP7171536B2 (ja) | 作業機 | |
| JP2802166B2 (ja) | 建設機械の油圧駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230207 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230802 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231012 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7368130 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |