JP7347375B2 - 走行車線計画装置及び走行車線計画用コンピュータプログラム - Google Patents
走行車線計画装置及び走行車線計画用コンピュータプログラム Download PDFInfo
- Publication number
- JP7347375B2 JP7347375B2 JP2020145821A JP2020145821A JP7347375B2 JP 7347375 B2 JP7347375 B2 JP 7347375B2 JP 2020145821 A JP2020145821 A JP 2020145821A JP 2020145821 A JP2020145821 A JP 2020145821A JP 7347375 B2 JP7347375 B2 JP 7347375B2
- Authority
- JP
- Japan
- Prior art keywords
- lane
- vehicle
- driving
- adjacent
- approach section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004590 computer program Methods 0.000 title claims description 9
- 238000001514 detection method Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000004891 communication Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 4
- 230000004397 blinking Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000008034 disappearance Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/34—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating change of drive direction
- B60Q1/346—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating change of drive direction with automatic actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/34—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating change of drive direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/10—Number of lanes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4045—Intention, e.g. lane change or imminent movement
Description
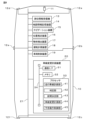
11 カメラ
12a~12f 方向指示器
13 測位情報受信機
14 地図情報記憶装置
15 ナビゲーション装置
16 位置推定装置
17 物体検出装置
18 運転計画装置
19 車両制御装置
20 走行車線計画装置
21 車内ネットワーク
31 通信インターフェース
32 メモリ
33 プロセッサ
34 信号線
41 走行車線計画部
42 判定部
43 区間決定部
44 車線変更計画部
45 予告動作制御部
Claims (4)
- 車両が道路内で走行する走行予定車線を表す走行車線計画が、隣接車線上のイベント位置までに、前記車両の走行している走行車線から隣接車線へ前記車両が車線変更することを含む場合、地図情報と前記走行車線計画とに基づいて、前記イベント位置と前記車両の現在位置との間の前記隣接車線上に、前記走行車線とは異なる車線から他の車両が前記隣接車線へ進入してくる可能性のある進入区間があるか否かを判定する判定部と、
前記進入区間があると判定された場合、前記車両が前記隣接車線における前記進入区間の横を通過した後に、前記車両が前記走行車線から前記隣接車線へ移動する車線変更計画を生成する車線変更計画部と、
前記車線変更計画に基づいて、前記車両が前記隣接車線における前記進入区間の横の前記走行車線を走行している時に、前記車両の周囲に対して当該車両が前記走行車線から前記隣接車線へ車線変更することを予告する予告動作として、前記走行車線における前記車両の進行方向と直交する幅方向の中央よりも前記隣接車線側の位置で前記車両を走行させることを前記車両に実行させる予告動作制御部と、
を有することを特徴とする走行車線計画装置。 - 前記予告動作制御部は、前記車両が前記隣接車線における前記進入区間の横の前記走行車線を走行している時に、前記予告動作として方向指示器を点滅させる請求項1に記載の走行車線計画装置。
- 前記進入区間があると判定された場合、前記地図情報に基づいて、前記走行車線とは異なる車線が前記隣接車線との合流を開始する合流開始位置か、又は、前記走行車線とは異なる車線が前記隣接車線との合流を終了する合流終了位置に基づいて、前記進入区間の範囲を決定する区間決定部を有する請求項1又は2に記載の走行車線計画装置。
- 車両が道路内で走行する走行予定車線を表す走行車線計画が、隣接車線上のイベント位置までに、前記車両の走行している走行車線から隣接車線へ前記車両が車線変更することを含む場合、地図情報と前記走行車線計画とに基づいて、前記イベント位置と前記車両の現在位置との間の前記隣接車線上に、前記走行車線とは異なる車線から他の車両が前記隣接車線へ進入してくる可能性のある進入区間があるか否かを判定し、
前記進入区間があると判定された場合、前記車両が前記隣接車線における前記進入区間の横を通過した後に、前記車両が前記走行車線から前記隣接車線へ移動する車線変更計画を生成し、
前記車線変更計画に基づいて、前記車両が前記隣接車線における前記進入区間の横の前記走行車線を走行している時に、前記車両の周囲に対して当該車両が前記走行車線から前記隣接車線へ車線変更することを予告する予告動作として、前記走行車線における前記車両の進行方向と直交する幅方向の中央よりも前記隣接車線側の位置で前記車両を走行させることを前記車両に実行させる、
ことをプロセッサに実行させることを特徴とする走行車線計画用コンピュータプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020145821A JP7347375B2 (ja) | 2020-08-31 | 2020-08-31 | 走行車線計画装置及び走行車線計画用コンピュータプログラム |
| US17/372,621 US11834047B2 (en) | 2020-08-31 | 2021-07-12 | Traveling lane planning device, storage medium storing computer program for traveling lane planning, and traveling lane planning method |
| CN202111005004.5A CN114103954B (zh) | 2020-08-31 | 2021-08-30 | 行驶车道计划装置、存储介质以及行驶车道计划方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020145821A JP7347375B2 (ja) | 2020-08-31 | 2020-08-31 | 走行車線計画装置及び走行車線計画用コンピュータプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022040891A JP2022040891A (ja) | 2022-03-11 |
| JP7347375B2 true JP7347375B2 (ja) | 2023-09-20 |
Family
ID=80357631
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020145821A Active JP7347375B2 (ja) | 2020-08-31 | 2020-08-31 | 走行車線計画装置及び走行車線計画用コンピュータプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11834047B2 (ja) |
| JP (1) | JP7347375B2 (ja) |
| CN (1) | CN114103954B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11648961B2 (en) * | 2020-11-25 | 2023-05-16 | Tusimple, Inc. | Autonomous vehicle handling in unusual driving events |
| CN115083206B (zh) * | 2022-04-28 | 2023-09-26 | 同济大学 | 一种用于道路车辆变道的过渡预告标线及变道决策方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015161518A (ja) | 2014-02-26 | 2015-09-07 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム |
| WO2017017761A1 (ja) | 2015-07-27 | 2017-02-02 | 日産自動車株式会社 | 経路誘導装置及び経路誘導方法 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10358034A1 (de) * | 2003-12-11 | 2005-07-14 | Daimlerchrysler Ag | Adaption einer automatischen Folgeführung an potentiell auf die eigene Fahrspur einscherende Verkehrsteilnehmer |
| WO2011158307A1 (ja) * | 2010-06-18 | 2011-12-22 | 本田技研工業株式会社 | 運転者の車線変更意図を予測するシステム |
| JP6015329B2 (ja) * | 2012-10-11 | 2016-10-26 | 株式会社デンソー | 隊列走行システム及び隊列走行装置 |
| JP6252235B2 (ja) | 2014-02-25 | 2017-12-27 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム |
| JP6491929B2 (ja) * | 2015-03-31 | 2019-03-27 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム |
| WO2017159487A1 (ja) * | 2016-03-14 | 2017-09-21 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| US10081357B2 (en) * | 2016-06-23 | 2018-09-25 | Honda Motor Co., Ltd. | Vehicular communications network and methods of use and manufacture thereof |
| JP6630267B2 (ja) * | 2016-12-21 | 2020-01-15 | 本田技研工業株式会社 | 車両制御装置 |
| WO2019198481A1 (ja) | 2018-04-13 | 2019-10-17 | 日立オートモティブシステムズ株式会社 | 推奨レーン判定装置 |
| JP7254474B2 (ja) * | 2018-10-09 | 2023-04-10 | 日立Astemo株式会社 | 車両制御システム |
| GB2579020B (en) * | 2018-11-14 | 2021-05-12 | Jaguar Land Rover Ltd | Vehicle control system and method |
| WO2020112827A2 (en) * | 2018-11-26 | 2020-06-04 | Mobileye Vision Technologies Ltd. | Lane mapping and navigation |
| US11052914B2 (en) * | 2019-03-14 | 2021-07-06 | GM Global Technology Operations LLC | Automated driving systems and control logic using maneuver criticality for vehicle routing and mode adaptation |
| US11447136B2 (en) * | 2019-05-15 | 2022-09-20 | Nissan Motor Co., Ltd. | Traveling control method and traveling control device for vehicle |
| JP7316542B2 (ja) * | 2019-05-21 | 2023-07-28 | スズキ株式会社 | 車両の走行制御装置 |
| EP4024364A4 (en) * | 2019-08-28 | 2022-08-24 | Mitsubishi Electric Corporation | TRAFFIC LANE CHANGE ROUTE INSTRUCTION DEVICE AND SYSTEM |
| US11468774B2 (en) * | 2020-03-17 | 2022-10-11 | Honda Motor Co., Ltd. | Systems and methods for cooperative ramp merge |
| US20210370978A1 (en) * | 2020-05-29 | 2021-12-02 | Toyota Research Institute, Inc. | Navigation cost computation for lane changes before a critical intersection |
| US11597388B2 (en) * | 2020-09-24 | 2023-03-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | System and method for connected vehicle lane merge |
| JP2022104008A (ja) * | 2020-12-28 | 2022-07-08 | 株式会社Subaru | 車両の走行支援システム、これに用いるサーバ装置、および車両 |
| JP2022148761A (ja) * | 2021-03-24 | 2022-10-06 | トヨタ自動車株式会社 | 車両制御装置及び車両制御用コンピュータプログラム |
| US20220348227A1 (en) * | 2021-04-29 | 2022-11-03 | Tusimple, Inc. | Systems and methods for operating an autonomous vehicle |
-
2020
- 2020-08-31 JP JP2020145821A patent/JP7347375B2/ja active Active
-
2021
- 2021-07-12 US US17/372,621 patent/US11834047B2/en active Active
- 2021-08-30 CN CN202111005004.5A patent/CN114103954B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015161518A (ja) | 2014-02-26 | 2015-09-07 | アイシン・エィ・ダブリュ株式会社 | 自動運転支援システム、自動運転支援方法及びコンピュータプログラム |
| WO2017017761A1 (ja) | 2015-07-27 | 2017-02-02 | 日産自動車株式会社 | 経路誘導装置及び経路誘導方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114103954A (zh) | 2022-03-01 |
| US11834047B2 (en) | 2023-12-05 |
| CN114103954B (zh) | 2023-10-20 |
| JP2022040891A (ja) | 2022-03-11 |
| US20220063627A1 (en) | 2022-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200014931A (ko) | 차량용 정보 기억 방법, 차량의 주행 제어 방법, 및 차량용 정보 기억 장치 | |
| EP3358545A1 (en) | Travel control method and travel control device | |
| US11928871B2 (en) | Vehicle position estimation device and traveling position estimation method | |
| JP7347375B2 (ja) | 走行車線計画装置及び走行車線計画用コンピュータプログラム | |
| CN115195755A (zh) | 车辆控制装置、存储介质以及车辆控制方法 | |
| JP2022013937A (ja) | 運転計画装置及び運転計画用コンピュータプログラム | |
| US20220315028A1 (en) | Vehicle control device, storage medium for storing computer program for vehicle control, and method for controlling vehicle | |
| JP7435513B2 (ja) | 車両制御装置及び車両制御方法 | |
| WO2021094799A1 (ja) | 信号機認識方法及び信号機認識装置 | |
| JP2021095078A (ja) | 車線変更決定装置 | |
| JP7251577B2 (ja) | 運転計画装置及び運転計画用コンピュータプログラム | |
| JP7476833B2 (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| US11892316B2 (en) | Map information assessment device, medium storing computer program for map information assessment, and map information assessment method | |
| JP2023043587A (ja) | 走行車線計画装置、走行車線計画用コンピュータプログラム及び走行車線計画方法 | |
| JP7251576B2 (ja) | 運転計画装置及び運転計画用コンピュータプログラム | |
| US11898861B2 (en) | Road zone assessment device, medium storing computer program for road zone assessment, and road zone assessment method | |
| US20220306162A1 (en) | Vehicle control device, medium for storing computer program for vehicle control, and method for controlling vehicle | |
| US20230177704A1 (en) | Positional precision assessment device, storage medium storing computer program for positional precision assessment, and method for determining positional precision | |
| JP2024026980A (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| JP2022148155A (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| CN117901855A (zh) | 车辆控制装置、车辆控制方法以及车辆控制用计算机程序 | |
| JP2022150784A (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| JP2023177091A (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| JP2023154345A (ja) | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 | |
| CN115214668A (zh) | 行驶车道计划装置、存储介质和行驶车道计划方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211011 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220926 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221004 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230427 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230821 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7347375 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |