JP7334149B2 - x線データ獲得の動作パラメータを入手する方法およびシステム - Google Patents
x線データ獲得の動作パラメータを入手する方法およびシステム Download PDFInfo
- Publication number
- JP7334149B2 JP7334149B2 JP2020518543A JP2020518543A JP7334149B2 JP 7334149 B2 JP7334149 B2 JP 7334149B2 JP 2020518543 A JP2020518543 A JP 2020518543A JP 2020518543 A JP2020518543 A JP 2020518543A JP 7334149 B2 JP7334149 B2 JP 7334149B2
- Authority
- JP
- Japan
- Prior art keywords
- patient
- ray
- maxillofacial
- region
- interest
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 70
- 238000007408 cone-beam computed tomography Methods 0.000 claims description 57
- 238000003384 imaging method Methods 0.000 claims description 47
- 210000002455 dental arch Anatomy 0.000 claims description 29
- 238000005259 measurement Methods 0.000 claims description 11
- 210000001847 jaw Anatomy 0.000 claims description 9
- 230000003287 optical effect Effects 0.000 claims description 7
- 210000004283 incisor Anatomy 0.000 claims description 6
- 230000037182 bone density Effects 0.000 claims description 5
- 238000000053 physical method Methods 0.000 claims description 3
- 230000001678 irradiating effect Effects 0.000 claims description 2
- 230000008569 process Effects 0.000 description 24
- 238000004590 computer program Methods 0.000 description 11
- 230000000712 assembly Effects 0.000 description 10
- 238000000429 assembly Methods 0.000 description 10
- 238000004422 calculation algorithm Methods 0.000 description 8
- 210000003128 head Anatomy 0.000 description 7
- 230000000877 morphologic effect Effects 0.000 description 7
- 238000007689 inspection Methods 0.000 description 6
- 210000000988 bone and bone Anatomy 0.000 description 5
- 210000004373 mandible Anatomy 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 210000001061 forehead Anatomy 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000014759 maintenance of location Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 210000002050 maxilla Anatomy 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 210000003625 skull Anatomy 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
Images















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/542—Control of apparatus or devices for radiation diagnosis involving control of exposure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/51—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for dentistry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/04—Positioning of patients; Tiltable beds or the like
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/40—Arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4064—Arrangements for generating radiation specially adapted for radiation diagnosis specially adapted for producing a particular type of beam
- A61B6/4085—Cone-beams
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/467—Arrangements for interfacing with the operator or the patient characterised by special input means
- A61B6/469—Arrangements for interfacing with the operator or the patient characterised by special input means for selecting a region of interest [ROI]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/48—Diagnostic techniques
- A61B6/488—Diagnostic techniques involving pre-scan acquisition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5217—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data extracting a diagnostic or physiological parameter from medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/542—Control of apparatus or devices for radiation diagnosis involving control of exposure
- A61B6/544—Control of apparatus or devices for radiation diagnosis involving control of exposure dependent on patient size
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/54—Control of apparatus or devices for radiation diagnosis
- A61B6/545—Control of apparatus or devices for radiation diagnosis involving automatic set-up of acquisition parameters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/06—Diaphragms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/46—Arrangements for interfacing with the operator or the patient
- A61B6/461—Displaying means of special interest
- A61B6/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/505—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of bone
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- High Energy & Nuclear Physics (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Human Computer Interaction (AREA)
- Physiology (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Description
-患者の顎顔面第1関心領域ROI1を識別することと、
-患者が咬合位置にあるか、患者位置決めアセンブリを咬む時に、前記患者の顎顔面第1関心領域(ROI1)の水平面の高さを判定することであって、前記水平面は、歯および顎の骨を通過する、判定することと、
-x線CBCTイメージングおよび第1のx線線量を使用して、スリット形状のコリメータ・ウィンドウを介して、前記水平面を含む前記患者の顎顔面第1関心領域ROI1に対する相対的なデータの第1のセットを獲得することであって、データの前記第1のセットは、CBCTスライスを生成するのに適する、獲得することと、
-患者の顎顔面第1関心領域ROI1に対する相対的なデータの第1のセットに基づいて水平面を含むCBCTスライスを再構成することと、
-第2のx線線量を使用する患者の顎顔面第2関心領域ROI2のデータの第2のセットの獲得を考慮して、再構成されたCBCTスライスに基づいてx線イメージング装置の動作パラメータを入手することであって、第1のx線線量は、第2のx線線量より低い、入手することと
を含む方法が提供される。
-患者の水平面の高さを判定することは、事前に、
患者の顎顔面第1関心領域(ROI1)を含む横x線スカウト・ビューを獲得することと、
ランドマークを含む患者の顎顔面第1関心領域(ROI1)を含む光学画像を獲得することと、
患者位置決めデバイスを使用して患者の顎顔面第1関心領域(ROI1)に対する物理測定を実行することと
のうちの1つを含み、
-この方法は、再構成されたCBCTスライスに基づいて、患者の顎顔面第1領域形態に対するまたは患者の顎顔面第1領域内のx線患者減衰に対する相対的な特徴を判定することを含み、動作パラメータの入手は、判定された特徴に基づき、
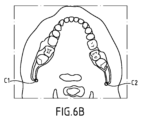
-患者の顎顔面第1領域形態に対する相対的な判定された特徴は、患者の顎顔面第1領域の歯列弓の幅、奥行き、および形状のうちの少なくとも1つを含み、
-患者の顎顔面第1領域の歯列弓の幅は、患者の下顎枝の2つの端の間の幅を判定することによって判定され、
-患者の顎顔面第1領域形態に対する相対的な判定された特徴は、歯列弓に関する歯の相対位置を含み、
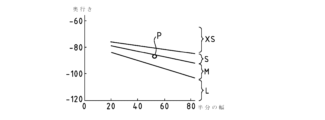
-患者の形態は、顎顔面第1領域の幅と、異なる患者の形態の所定のモデルまたは所定の異なる患者の形態特性とのこの幅の比較との両方に基づいて判定され、
-患者の形態は、切歯の位置に対する相対的な患者の下顎枝の奥行きに基づいても判定され、
-所定の異なる患者の形態特性は、U形状、V形状、および正方形形状を含む歯列弓形状の所定のセットを含み、
-再構成されたCBCTスライスに基づいてx線源および少なくとも1つのx線センサを含むx線イメージング装置の動作パラメータを入手することは、形態データに基づいて、線源とx線センサとの両方の軌跡を調整することを含み、
-再構成されたCBCTスライスに基づいてx線源および少なくとも1つのx線センサを含むx線イメージング装置の動作パラメータを入手することは、形態データに基づいて、x線源のx線線量を調整することを含み、
-再構成されたCBCTスライスに基づいてx線源および少なくとも1つのx線センサを含むx線イメージング装置の動作パラメータを入手することは、再構成されたCBCTスライス上の患者の顎顔面第1領域骨密度によるx線減衰の測定に基づいて、x線源のx線線量を調整することを含み、
-x線イメージング装置の動作パラメータを入手することは、
動作パラメータの所定のセットを選択することと、
所定のモデルに基づいて動作パラメータを判定することと
のうちの1つを含み、
-第1のx戦線量は、第2のx線線量の20%を超えない。
-患者が咬合位置にあるか患者位置決めアクセサリを咬む時に患者の顎顔面第1関心領域に対する相対的なデータの第1のセットを獲得するために、第1のx線線量から形成されるスリット形状のx線ビームを用いて患者の顎顔面第1関心領域を照射する間に患者の顎顔面第1関心領域の周囲を移動するように構成されたx線源および少なくとも1つのx線センサであって、前記患者の顎顔面第1関心領域は、歯および顎の骨を通過する水平面を含み、データの前記第1のセットは、CBCTスライスを生成するのに適する、x線源および少なくとも1つのx線センサと、
-
患者の顎顔面第1関心領域に対する相対的なデータの第1のセットに基づいて水平面を含むCBCTスライスを再構成し、
第2のx線線量を使用する患者の顎顔面第2領域のデータの第2のセットの獲得を考慮して、再構成されたCBCTスライスに基づいて、x線イメージング装置の動作パラメータを入手し、第1のx線線量は、第2のx線線量より低い
ように構成されたマイクロプロセッサと
を含むシステムが提供される。
-第2に、x線源が、同一の高度のままになり、x線コリメータが、平面の判定された高さに向かって上向きにx線ビームを方位付けるように移動される
という2つの形が、装置を獲得構成にセットするのに使用される。
-x線源のx線管に現在印加されているピーク電圧(単位:kVp)は、x線光子の最大エネルギを決定し、
-x線管に現在印加されている電流(単位:mA)は、x線管内部の電子の生成をもたらし、電流の増加は、電子のより多くの生成をもたらし、これは、放射の量を増やし、したがってセンサに達する光子の量を増やし、したがってx線密度を高め、
-時間係数(単位:秒)は、x線管内の電子生成密度を表し、したがって、電流密度の印加の持続時間を示す。
-パノラマ検査では20μSvと30μSvとの間、
-広い視野(17×13cm)の3D検査では200μSv、
-5×5cm視野の3D検査では20μSv
である。
-パノラマ検査では10秒と20秒との間、
-3D検査では5秒と20秒との間
である。
-パノラマ検査では100μm画素サイズ
-3D検査では100μmボクセル・サイズ
によって画定される。
Claims (13)
- 患者の顎顔面領域のx線イメージングに関する動作パラメータを入手する方法であって、前記方法は:
-患者の顎顔面第1関心領域(ROI1)を識別するステップ;、
-前記患者が咬合位置にあるか、患者位置決めアクセサリを咬む時に、前記患者の顎顔面第1関心領域(ROI1)の水平面の高さを判定する、事前判定フェーズのステップであって、前記水平面は、歯および顎の骨を通過する、ステップ; -前記患者の顎顔面第1関心領域(ROI1)の水平面の高さを判定した場合に、x線CBCTイメージングおよび第1のx線線量を使用して、スリット形状のコリメータ・ウィンドウを介して、前記水平面を含む前記患者の顎顔面第1関心領域(ROI1)に対する相対的なデータの第1のセットを獲得するステップであって、データの前記第1のセットは、CBCTスライスを生成するのに適する、ステップ;
-前記患者の顎顔面第1関心領域(ROI1)に対する相対的なデータの前記第1のセットに基づいて前記水平面を含む前記CBCTスライスを再構成するステップ;
-第2のx線線量を使用する患者の顎顔面第2関心領域(ROI2)のデータの第2のセットの獲得を考慮して、前記再構成されたCBCTスライスに基づいてx線イメージング装置の動作パラメータを入手するステップであって、当該ステップは、前記再構成されたCBCTスライス上の前記患者の顎顔面第1領域骨密度によるx線減衰の測定に基づいて、前記x線源のx線線量を調整するステップを含み、前記第1のx線線量は、前記第2のx線線量の20%を超えない、ステップ、
を含む方法。 - 前記患者の前記水平面の高さを判定するステップは、事前に、
-前記患者の顎顔面第1関心領域(ROI1)を含む横x線スカウト・ビューを獲得するステップ;
-ランドマークを含む前記患者の顎顔面第1関心領域(ROI1)を含む光学画像を獲得するステップ;
-患者位置決めデバイスを使用して前記患者の顎顔面第1関心領域(ROI1)に対する物理測定を実行するステップ、
のうちの1つを含む、請求項1に記載の方法。 - 前記再構成されたCBCTスライスに基づいて、前記患者の顎顔面第1領域形態に対するまたは前記患者の顎顔面第1領域内のx線患者減衰に対する、前記患者の顎顔面第1領域の歯列弓の幅、奥行き、および形状のうちの少なくとも1つを含む特徴を判定するステップを含み、動作パラメータの前記入手は、前記判定された特徴に基づく、請求項1または2に記載の方法。
- 前記患者の顎顔面第1領域の前記歯列弓の前記幅は、前記患者の下顎枝の2つの端の間の幅を判定することによって判定される、請求項3に記載の方法。
- 前記患者の顎顔面第1領域形態に対する相対的な前記判定された特徴は、歯列弓に関する前記歯の相対位置を含む、請求項3または4に記載の方法。
- 前記患者の形態は、前記顎顔面第1領域の幅と、異なる患者の形態の所定のモデルまたは所定の異なる患者の形態特性とのこの幅の比較との両方に基づいて判定される、請求項3から5のいずれか1項に記載の方法。
- 前記患者の形態は、切歯の位置に対する相対的な前記患者の下顎枝の奥行きに基づいても判定される、請求項6に記載の方法。
- 前記所定の異なる患者の形態特性は、U形状、V形状、および正方形形状を含む歯列弓形状の所定のセットを含む、請求項6または7に記載の方法。
- 前記再構成されたCBCTスライスに基づいてx線源および少なくとも1つのx線センサを含むx線イメージング装置の動作パラメータを入手するステップは、前記患者の形態に基づいて、線源と前記x線センサとの両方の軌跡を調整するステップを含む、請求項1から8のいずれか1項に記載の方法。
- 前記再構成されたCBCTスライスに基づいてx線源および少なくとも1つのx線センサを含むx線イメージング装置の動作パラメータを入手するステップは、前記患者の形態に基づいて前記x線源のx線線量を調整するステップを含む、請求項1から9のいずれか1項に記載の方法。
- x線イメージング装置の動作パラメータを入手するステップは、
-動作パラメータの所定のセットを選択するステップ、
-所定のモデルに基づいて動作パラメータを判定するステップ
のうちの1つを含む、請求項1から10のいずれか1項に記載の方法。 - 患者の顎顔面領域のx線イメージングに関する動作パラメータを入手するためのx線CBCT(Cone Beam Computed Tomography)イメージングシステムであって、
-患者が咬合位置にあるか患者位置決めアクセサリを咬む時に前記患者の顎顔面第1関心領域に対する相対的なデータの第1のセットを獲得するために、第1のx線線量から形成されるスリット形状のx線ビームを用いて前記患者の顎顔面第1関心領域を照射する間に前記患者の顎顔面第1関心領域の周囲を移動するように構成されたx線源および少なくとも1つのx線センサであって、前記患者の顎顔面第1関心領域は、歯および顎の骨を通過する水平面を含み、データの前記第1のセットは、CBCTスライスを生成するのに適する、x線源および少なくとも1つのx線センサと、
-前記患者の顎顔面第1関心領域に対する相対的なデータの前記第1のセットに基づいて前記水平面を含む前記CBCTスライスを再構成し、
第2のx線線量を使用する前記患者の顎顔面第2領域のデータの第2のセットの獲得を考慮して、前記再構成されたCBCTスライスに基づいて、x線イメージング装置の動作パラメータを入手し、前記再構成されたCBCTスライス上の前記患者の顎顔面第1領域骨密度によるx線減衰の測定に基づいて、前記x線源のx線線量を調整し、前記第1のx線線量は、前記第2のx線線量の20%を超えない
ように構成されたマイクロプロセッサと
を備えるシステム。 - コンピュータまたはマイクロプロセッサに請求項1から11のいずれかに記載の方法を実行させる命令をその中に記憶されたコンピュータ記憶媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17306307.4A EP3461418B1 (en) | 2017-09-29 | 2017-09-29 | A method and a system for obtaining operating parameters for x ray data acquisition |
| EP17306307.4 | 2017-09-29 | ||
| PCT/EP2018/076173 WO2019063640A1 (en) | 2017-09-29 | 2018-09-26 | METHOD AND SYSTEM FOR OBTAINING OPERATING PARAMETERS FOR ACQUIRING X-RAY DATA |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020534970A JP2020534970A (ja) | 2020-12-03 |
| JP2020534970A5 JP2020534970A5 (ja) | 2021-11-04 |
| JP7334149B2 true JP7334149B2 (ja) | 2023-08-28 |
Family
ID=60080730
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020518543A Active JP7334149B2 (ja) | 2017-09-29 | 2018-09-26 | x線データ獲得の動作パラメータを入手する方法およびシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US20200261038A1 (ja) |
| EP (1) | EP3461418B1 (ja) |
| JP (1) | JP7334149B2 (ja) |
| KR (1) | KR20200100039A (ja) |
| ES (1) | ES2934233T3 (ja) |
| WO (1) | WO2019063640A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102292080B1 (ko) * | 2019-11-07 | 2021-08-20 | 부산대학교 산학협력단 | 아치 형태를 이용한 개인맞춤 치과용 파노라마 시스템 및 이의 제어 방법 |
| JP7222947B2 (ja) * | 2020-04-01 | 2023-02-15 | 株式会社モリタ製作所 | X線撮影装置およびx線撮影方法 |
| CN116019474B (zh) * | 2023-02-22 | 2023-09-19 | 有方(合肥)医疗科技有限公司 | 多射源成像装置及方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009133937A1 (ja) | 2008-05-01 | 2009-11-05 | 株式会社モリタ製作所 | 医療用x線ct撮影装置、医療用x線ct画像表示装置及びその表示方法 |
| JP2013135765A (ja) | 2011-12-28 | 2013-07-11 | Nihon Univ | X線ct撮影装置、及びx線ct撮影方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3331274B2 (ja) * | 1995-03-06 | 2002-10-07 | 株式会社モリタ製作所 | 医療用x線撮影装置 |
| US7787586B2 (en) * | 2007-02-22 | 2010-08-31 | J. Morita Manufacturing Corporation | Display method of X-ray CT image of maxillofacial area, X-ray CT apparatus and X-ray image display apparatus |
| US10231681B2 (en) * | 2013-12-02 | 2019-03-19 | Cefla Societá Cooperativa | Method and apparatus for adjusting technical exposure factors during radiographic acquisition |
| JP2015177963A (ja) * | 2014-02-27 | 2015-10-08 | 株式会社テレシステムズ | X線撮影装置及びティーチング装置 |
| US10278666B2 (en) * | 2014-06-13 | 2019-05-07 | Palodex Group Oy | Systems and methods of automated dose control in x-ray imaging |
| JP6780948B2 (ja) * | 2016-03-28 | 2020-11-04 | キヤノンメディカルシステムズ株式会社 | X線ct装置 |
-
2017
- 2017-09-29 EP EP17306307.4A patent/EP3461418B1/en active Active
- 2017-09-29 ES ES17306307T patent/ES2934233T3/es active Active
-
2018
- 2018-09-26 JP JP2020518543A patent/JP7334149B2/ja active Active
- 2018-09-26 US US16/652,030 patent/US20200261038A1/en not_active Abandoned
- 2018-09-26 WO PCT/EP2018/076173 patent/WO2019063640A1/en active Application Filing
- 2018-09-26 KR KR1020207012518A patent/KR20200100039A/ko unknown
-
2022
- 2022-02-04 US US17/592,825 patent/US11793476B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009133937A1 (ja) | 2008-05-01 | 2009-11-05 | 株式会社モリタ製作所 | 医療用x線ct撮影装置、医療用x線ct画像表示装置及びその表示方法 |
| JP2013135765A (ja) | 2011-12-28 | 2013-07-11 | Nihon Univ | X線ct撮影装置、及びx線ct撮影方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11793476B2 (en) | 2023-10-24 |
| WO2019063640A1 (en) | 2019-04-04 |
| EP3461418B1 (en) | 2022-11-30 |
| ES2934233T3 (es) | 2023-02-20 |
| US20200261038A1 (en) | 2020-08-20 |
| JP2020534970A (ja) | 2020-12-03 |
| EP3461418A1 (en) | 2019-04-03 |
| US20220361830A1 (en) | 2022-11-17 |
| KR20200100039A (ko) | 2020-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6297504B2 (ja) | デジタルラジオグラフィのための装置および方法 | |
| JP5878121B2 (ja) | X線断層像撮影装置 | |
| JP6370297B2 (ja) | 部分的ct撮影のための装置 | |
| US11793476B2 (en) | Method and a system for obtaining operating parameters for x ray data acquisition | |
| JP5878117B2 (ja) | 放射線撮像装置及び同装置に用いるファントム | |
| US11051771B2 (en) | Stationary intraoral tomosynthesis imaging systems, methods, and computer readable media for three dimensional dental imaging | |
| CN109803586B (zh) | 用于三维牙科成像的静态口内层析合成成像系统、方法和计算机可读介质 | |
| EP2975578A2 (en) | System and method of artifact correction in 3d imaging | |
| US11793475B2 (en) | Method and system for obtaining operating parameters for 3D x ray acquisition | |
| EP2123223A1 (en) | Method and Apparatus for Simplified Patient Positioning in Dental Tomographic X-Ray Imaging | |
| US20080232539A1 (en) | Method for the reconstruction of a panoramic image of an object, and a computed tomography scanner implementing said method | |
| JP2016152909A (ja) | 小照射野x線撮影システム及び方法 | |
| JP2014138911A (ja) | X線ct撮影装置及びx線ct画像の表示方法 | |
| JP2003230556A (ja) | X線診断装置 | |
| KR102203610B1 (ko) | 파노라마 영상 생성 방법, 파노라마 영상 생성 장치 및 컴퓨터 판독 가능한 기록 매체 | |
| Kharbanda et al. | Functional and technical characteristics of different cone beam computed tomography units | |
| Niu et al. | Conebeam CT for Medical Imaging and Image-Guided Interventions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210921 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220830 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20221129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230214 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230511 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230711 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230725 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230816 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7334149 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |