JP7330964B2 - クリップ及びクリップアセンブリ - Google Patents
クリップ及びクリップアセンブリ Download PDFInfo
- Publication number
- JP7330964B2 JP7330964B2 JP2020526592A JP2020526592A JP7330964B2 JP 7330964 B2 JP7330964 B2 JP 7330964B2 JP 2020526592 A JP2020526592 A JP 2020526592A JP 2020526592 A JP2020526592 A JP 2020526592A JP 7330964 B2 JP7330964 B2 JP 7330964B2
- Authority
- JP
- Japan
- Prior art keywords
- jaws
- clip
- engagement
- jaw
- endoscopic device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/128—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips
- A61B17/1285—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B2017/12004—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for haemostasis, for prevention of bleeding
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B2017/1205—Introduction devices
Description
市販されている止血クリップは、ASTM F2503-13に従って「MR Conditional」とみなされており、MRI手技中にクリップの故障につながる可能性がある。
FDAガイダンス及びASTM F2503-13の下では、「MR Safe」とはすべてのMRI環境において既知の危険性がないことを意味する。MR Safeクリップは、MRIを受ける患者において安定しており、MRI環境において既知のハザードをもたらさないと考えられる。
クリップは、非導電性または非磁性材料で作られる。この装置の新規な態様は、クリップがMRI処置を受けている体内に存在する間に組織を把持し保持することができるという事実を中心とする。
市販されている他のクリップは、誘導された磁場の下で反応し、この反応(振動および/または温度上昇を含むことができる)は、クリップの保持能力を損なう可能性がある。
高エネルギー磁場の影響を受けない材料(プラスチック、ガラス、セラミック、非鉄金属など)を利用することで、この懸念を緩和する。
クリップは、その遠位端にある第1のアームと、その遠位端にある第2のアームと、その近位端にある解放部分と、を含む。
第1および第2のアームの少なくとも一方は、開位置と閉位置との間で移動可能である。各アームの遠位端は、係合部分を有する。クリップは、非導電性または非磁性材料で作られる。ロック機構は、第1および第2のアームを閉位置にロックするように構成される。
この方法は、1)クリップをその開放位置で露出させるステップと、2)係合部分を処置領域に整列させるようにドライバを調整するステップと、3)クリップを外側シース内に引き込んでクリップを閉じるステップと、4)カラーを移動させて保持機構を通過させるステップと、5)ドライバを伸ばしてプッシャチューブを後退させるステップと、6)ドライバをクリップから解放するステップと、を含む。
実際に、特許請求の範囲によって記載される本発明は、本明細書に記載される例示的な実施形態よりも広く、それによって制限されず、特許請求の範囲で使用される用語はそれらの完全な通常の意味を有する。
むしろ、これらの実施形態は本開示が徹底的かつ完全であり、一般的な発明概念の範囲を当業者に完全に伝えるように提供される。
この詳細な説明および添付の特許請求の範囲で使用されるように、単数形「a」、「an」、および「the」は文脈が明らかに沿わないことを示さない限り、複数形も含むことが意図される。
したがって、明細書および特許請求の範囲に記載された数値特性は明細書および特許請求の範囲に記載された数値特性が特に断らない限り、すべての例において「約」という用語によって修正されるものと理解されるべきである。
一般的な発明概念の広い範囲を示す数値範囲およびパラメータは近似値であるにもかかわらず、特定の実施例に示される数値は可能な限り正確に報告される。しかしながら、任意の数値は本質的に、それらのそれぞれの測定において見出される誤差から必然的に生じる特定の誤差を含む。
クリップアセンブリは、クリップ10と、カラー20のようなロック機構と、駆動アセンブリ(カテーテルアセンブリ)30と、を備えている。
駆動アセンブリ30は、所望に応じてクリップアセンブリを操作および解放するように構成される。
クリップの一実施形態では、把持部分12が第1のアーム50および第2のアーム60を備える。
いくつかの実施形態では、第1および第2のアーム50、60の一方は可動であるように構成され、他方のアームは静止している。
いくつかの実施形態では、第1および第2のアーム50、60の両方が可動であるように構成される。
いくつかの実施形態では第1および第2のアーム50、60の一方は弾性湾曲アームである。
いくつかの実施形態では、第1および第2のアーム50、60の両方が弾性湾曲アームである。アームの一部は、クリップの軸から外側に凸状である。言い換えれば、クリップはウィッシュボーン形状を有し、組織の周囲を迅速に閉鎖することができる。
湾曲アームは、組織を集めるための捕捉空間を形成する。当業者は、クリップ10が3つ以上のアーム、例えば3つのアームまたは4つのアームを備えてもよいことを合理的に理解すべきである。
いくつかの実施形態では、クリップは偶数のアームを有する。アームは平坦であってもよい。アームは非平面であってもよい。
いくつかの実施形態では、クリップ10が開放位置で少なくとも11mmの顎部開口部を有する。
いくつかの実施形態では、クリップ10が閉鎖位置で2.8mmチャネルを有するスコープに嵌合し、回転し、スコープを通って移動することができる。
図7a~図7cを参照すると、クリップ10が閉鎖し始めると、第1および第2のアーム50、60の遠位端54、64は互いに向かって移動し、第1および第2の係合部分56、66は互いに係合し、これは、アームに対して予圧を与え、組織を把持する能力を増大させる。
クリップがその完全に閉じた位置にあるとき、アームはより良好な止血または他の所望の効果を達成するために、応力を受け続ける。一方、2つの係合部の近傍には、組織捕捉領域21が形成されている。
いくつかの実施形態では、オフセット歯が遠位係合部分の幅がクリップのアームよりも広く、組織に対する優れた把持を可能にする輪郭を有する。これらの係合部分は、代替材料で作られ、アームに取り付けられてもよい。当業者は、第1および第2の係合部分56、66が複数のオフセット歯、または有効な止血効果を達成するために互いに安定して係合し得る他の公知の構造であり得ることを、合理的に理解すべきである。
クリップの代替実施形態では、第1および第2の係合部分が二重オフセット歯を備える。二重歯構造はオフセット歯が過度に重なり、閉鎖位置に固着することを防止する。
保持機構16は、第1のアーム50の遠位端54の近くに配置された保持フィン57を備える。
保持フィン57は、カラー20がクリップ10の近位端からクリップの遠位端に向かって移動することを可能にする。保持フィン57は、カラー20の幾何学的形状と結合することにより、カラー20が第1のアーム50の遠位端54から摺動して離れるのを防止し、クリップ10を閉位置に保ち、第1および第2の係合部分56、66が係合した状態に保つように、負の角度または他の幾何学的形状を含むことができる。
保持フィン257、遠位ストップ258、および凹部259は、第1のアーム250の遠位端254の近くに配置される。保持フィン257は、上述した保持フィン57と同様の機能を有する。凹部259の長さは、カラー20を受け入れるように構成されている。遠位ストップ258は、カラー20が第1および第2のアーム250、260の遠位端254、264から滑り出るのを防止する。
第1および第2の凹部359、369の長さは、カラー20を受け入れるように構成されている。第1および第2の保持フィン357、367は、上述の保持フィン57と同様の機能を有する。第1および第2の遠位停止部358、368は、上述の遠位停止部158と同様の機能を有する。
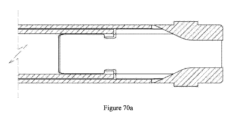
クリップ10のアーム50、60はカラー20がクリップ10のアーム50、60に沿って動くことができるように、ガイドチャンネル28を通過することができる。ガイドチャンネル28は、高さHと幅Wとを有している。
いくつかの実施形態ではガイドチャンネル28の高さHが閉位置におけるクリップ10の保持フィン57部分の高さH´に等しいか、またはそれよりわずかに高い。
いくつかの実施形態では、ガイドチャンネル28の幅Wがクリップ10の幅W´に等しいか、またはそれよりわずかに広い。ガイドチャンネル28は、カラー20が乗り越え、留まり保持フィン57によって保持されることを可能にするように構成されている。一方、保持されたカラー20は、第1および第2の係合部分56、66を強制的に閉じさせる。ガイドチャンネル28は、また、クリップ10がカラー20内で回転するのを防止するように構成される。一部の実施形態では、ガイドチャンネル28は長方形である。
ガイドチャンネルが、アームがガイドチャンネル内で移動可能である間にクリップがカラー内で回転するのを妨げる限り、ガイドチャンネルは他の形状であり得ることを当業者は合理的に理解すべきである。
支持アーム24、25はガイドチャンネル28と干渉しない。カラー20がクリップ10をロックし、保持フィン57によって保持されると、支持アーム24、25はアーム50、60の遠位端54、64に向かう。
いくつかの実施形態では、支持アーム24、25は、締め付け中にさらなる強度を提供するために、遠位端54、64までアーム50、60を覆うように構成される。しかしながら、いくつかの実施形態では、支持アーム24、25は支持アーム24、25が組織捕捉を妨害することを回避するように、第1および第2の係合部分56、66を越えて延在しない。
いくつかの実施形態では、支持アーム24、25は開口部26によって離間されている。
いくつかの実施形態では、支持アーム24、25は、クリップ10が閉じられたときにアーム50、60を覆うだけである。開口部26はクリップ10が完全に閉じられてロックされたときに、第1および第2の係合部分56、66によって捕捉された組織を受容するように構成される。開口部26及びアーム50、60間のギャップは、組織捕捉領域21(図7cに示す)を形成する。
いくつかの実施形態では、支持アーム24、25はアーム50、60が最大開放顎部を維持することができ、閉鎖するのが容易であるように、弾性であり、曲げることができる。
いくつかの実施形態では、支持アーム24、25は剛性である。
いくつかの実施形態では、スリーブ22がスリーブ22の近位端の外側に面取り部またはフィレット23を備える。面取りまたはフィレット23は、カラー20が保持フィンと連動するのを助ける。
カラーの支持アームは、支持アームの内面に配置されたスロットを備える。スロットは保持フィンをキャッチするように設定されている。いくつかの実施形態では、スロットはスルーホールである。
プッシャチューブ40は、外側シース42内に配置されるように構成される。ドライバ31は、プッシャチューブ40内に配置されるように構成されている。外側シース42は、クリップ10及びカラー20を収容するように構成されている。プッシャチューブ40はクリップ10を収容するが、カラー20を収容できないように構成されている。
いくつかの実施形態では、外側シース42が結合されたコネクタ34および解放部分14がプッシャチューブ40によって覆われたときに、それらが分離されることを防止する。
いくつかの実施形態では、カラー20が連結されたコネクタ34および解放部分14がカラー20によって覆われたときに、それらが切り離されることを防止する。
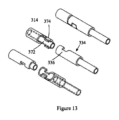
図9に示されるいくつかの実施形態では、駆動アセンブリ30がケーブル132とコネクタ134との間にワイヤ136をさらに備える。一実施形態によると、ワイヤ136の直径はコネクタ134が解放部分14内にロックされることを可能にするために、ケーブル132の直径よりも小さい。コネクタ34は、必要に応じて廃棄されるように、クリップ10に対する回転制御を持つように、解放部分14とインターフェースを構成する。
いくつかの実施形態では、解放部分14は、クリップ10の近位端から少なくとも1つの側部開口部を有する受容チャンバ70を備える。
いくつかの実施態様では、コネクタ34は、図8a及び図8bに示されるT字型円筒である。受容チャンバ70はT字状の形状のチャンバであり、T字状の形状のコネクタ34を受け入れることができる。
いくつかの実施形態では、コネクタ134が図9に示されるボールであり、受容チャンバ170は図10に示されるボール状の形状のチャンバであり、ボールコネクタ134を受容することができる。
いくつかの実施態様において、コネクタ234は図11に示される立方体であり、受け入れチャンバ270は図12に示される立方体状の形状チャンバであり、立方体コネクタ234を受け入れることができる。
当業者は、コネクタ334および解放部分314の構成が交換可能であることを合理的に理解すべきである。
カプラは、外側シースの遠位端に配置される。結合器は、カラーに取り外し可能に結合するように構成される。カプラは、クリップアセンブリの回転可能性を維持しながら、複数の開閉サイクル中にカラーを保持するように構成される。
いくつかの実施形態では、カラーの近位端が溝を備える。カプラの遠位端は、溝に係合可能であるように構成された縁部を備える。縁部は、離れて広がることができる複数の花弁を含む。押し込みチューブが結合器内で前進されると、押し込みチューブは、カラーを強制的に結合器から外す。次に、駆動アセンブリを前進させて、クリップアセンブリの取り外しを補助することができる。
この実施形態では、クリップ10が係合部分56、66に係合するためにカラー20内に引き込まれ、前述の実施形態のように外側シース42を利用しない。
導入器は、導入器の近位端に開口を有する内部チャンバと、導入器の遠位端に開口を有する。導入器の遠位端は、クリップアセンブリおよび駆動アセンブリの遠位端が通過することを可能にするように構成される。
導入器の近位端は、クリップアセンブリが通過するのを防止するように構成される。任意選択的に、導入器の近位端は、駆動アセンブリが通過するのを防止するように構成される。導入器は、輸送中および内視鏡上の生検弁を通しての導入中にクリップを保護するように構成される。導入器の遠位端は、生検弁に結合するように構成される。導入器の遠位端の最小長さLは約5mmである。クリップアセンブリは、生検弁を通って内視鏡作業チャネルに入るように構成される。
いくつかの実施形態では、内部チャンバはポッド形状である。クリップは、内部チャンバ内で全開状態を維持するように構成される。内面400は、カテーテルアセンブリが近位端から遠位端に向かって前進することにつれて、クリップを圧潰させるように構成される。クリップが導入器の遠位端から作業チャネルから完全に露出されると、クリップは、その完全に開いた状態に戻るように構成される。クリップアセンブリが駆動アセンブリから取り外されると、駆動アセンブリを内視鏡から引き抜くことができる。クリップ10は生検チャネルを通って前進する間にスコープへの損傷を防止するために、非外傷性の幾何学的形状を有する可能性がある。
クリップアセンブリは、ベース500と、一対の顎部502と、およびスイッチ504と、を備える。駆動アセンブリは、外側シース506と、カプラ508と、ドライバ510と、を備える。
図20は、閉位置におけるクリップアセンブリ及びその駆動アセンブリを示す。
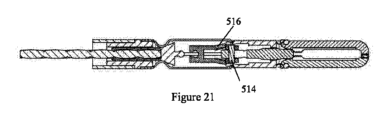
図21は、ストレス/ロック位置にあるクリップアセンブリとその駆動アセンブリを示す。
図22は、リリース/デタッチ位置にあるクリップアセンブリとその駆動アセンブリを示す。
クリップアセンブリは、駆動アセンブリによって開位置から閉位置へ、およびその逆に自由に移動することができる。クリップアセンブリは、応力/ロック位置に入ると、再び開くことができない。閉鎖位置はアームに対して予圧を与え、組織を把持する能力を増大させる。クリップが応力/ロック位置にあるとき、顎部はより良好な止血または他の所望の効果を達成するために、応力を受けたままである。
いくつかの実施形態では、解放部分512およびスイッチ504の遠位部分が別個の2つの部品であり、ピン514によって接続される。スイッチ504の遠位部分は、8の字形の穴を備える。8の字形の穴は、遠位部分と近位部分とを含む。ピン514が8の字形の穴の遠位部分に配置されると、クリップアセンブリを開位置と閉位置との間で移動させることができる。ピン514が8の字形の穴の近位部分に配置されると、クリップアセンブリはロックされ、最終的に解放され得る。
当業者は、8の字形の穴が必ずしも貫通穴ではなく、スロットであってもよいことを理解すべきである。
いくつかの実施形態では、8の字形の穴がスイッチ504の遠位部分の代わりに、解放部分512に配置される。
当業者は、機構が8の字形の穴でなくてもよく、同様の機能を達成する幾何学的形状であってもよいことを理解すべきである。
タブ516は、顎部が開位置と閉位置との間で移動する間、ベース内で移動可能であるように構成される。タブはさらに、ベースの外側に引っ張られ、スイッチ504がベース内に戻るのを防止して、応力が加わったときに顎部をロックするように構成されている。
ある実施形態では、解放部分512とスイッチ504の遠位部分との間の接続部分が、クリップアセンブリが開放、閉鎖、ストレス/ロック、および解放位置を有することを可能にする8の字形の穴の同様の効果を達成するように、弾性材料で作られる。
当業者であれば、カプラ508と外側シース506とが一体であってもよいことを理解すべきである。カプラ508は、ベース500に取り外し可能に結合するように構成される。カプラ508はクリップアセンブリの回転可能性を維持しながら、複数の開閉サイクルの間、ベース500を保持するように構成される。
いくつかの実施形態では、ベース500の近位端が溝を備える。カプラ508の遠位端は、溝に係合可能であるように構成された縁部を備える。縁部は、離れて広がることができる複数の花弁を含む。
カプラ508は、ボトルネック520をさらに備える。ドライバ510はウェッジ522を含む。ウェッジ522はドライバ510が引き戻されてクリップアセンブリを駆動アセンブリから取り外そうとするときに、ボトルネック520を押すように構成される。ボトルネック520を押すことによって、ウェッジ522は、カプラ508の花弁を強制的に離す。その後、エッジと溝が外れる。したがって、クリップアセンブリは取り外される。
クリップアセンブリは、第1の顎部602と、第2の顎部604と、第1のピボット606と、エラストマーバンド608と、を備える。
第1の顎部602は、第1のピボット606において第2の顎部604に枢動可能に連結されている。第1の顎部は、遠位アームおよび近位アームを備える。第2の顎部は、遠位アームおよび近位アームを備える。
第1および第2の顎部の両方は上記では移動顎部として記載されているが、当業者は第1の顎部が静止顎部であってもよいことを容易に理解すべきである。
いくつかの実施形態では、エラストマーバンドが第1の顎部の近位アームと第2の顎部の近位アームとの間を接続する。
いくつかの実施形態では、1つのエラストマーバンドが第1および第2の顎部の遠位アームの間を接続し、別のエラストマーバンドが第1および第2の顎部の近位アームの間を接続する。エラストマーバンドは、第1および第2の顎部の周りのリング、第1および第2の顎部の間のバンド、または第1および第2の顎部の間の任意の他の接続構造であってもよい。
いくつかの実施形態では、エラストマーバンドは排除され、ピボットは第1および第2の顎部が通常は閉じられるように、共通のエラストマー構造を備える。
レシーバ610は、駆動アセンブリがクリップアセンブリを駆動して開閉できるように、駆動アセンブリを取り外し可能に受け入れるように構成される。
フォーク614は、外側シース612内に配置される。フォーク614の遠位端は、外側シース612の遠位端から延びている。フォーク614の近位端は、ドライバ616に接続される。一実施形態では、フォーク614が第2のピボット628で外側シース612に旋回可能に接続される。
係合部分618は、クリップアセンブリのレシーバ610と係合するように構成される。ドライバ616がその遠位方向に向かって押されると、フォーク614の遠位端が開放され、その結果、クリップアセンブリが開放される。ドライバ616がその近位方向に向かって引っ張られると、フォーク614の遠位端が閉じられ、その結果、クリップアセンブリが閉じられる。エラストマーバンドは、止血効果を達成するために閉鎖力を生成する。
いくつかの実施形態では、閉鎖力は約150~400gである。
第1のピボット606は、展開するまで外側シース612に接続される。展開後、第1のピボット606は、クリップアセンブリと共に残る。あるいは、クリップアセンブリが、リンクアームがクリップアセンブリに緩く取り付けられたままであることを可能にする、異なるピボット615でフォークから取り外されてもよい。
当業者は、フォーク(アセンブリ)が、駆動機構が遠位方向に前進するときに遠位端が開放される任意の公知の構造であり得ることを合理的に理解すべきである。
当業者は、フォークアセンブリ614および/またはレシーバ610からのクリップアセンブリの取り外しが、機械的取り外しなどの様々な方法によって、または顎部イントを切断するために電流を印加することによって達成され得ること、および取り外しがフォークアセンブリ614内の任意の連結点で達成され得ることを合理的に理解すべきである。
いくつかの実施形態では、ドライバ616は金属であり、フォークアセンブリ614はプラスチックである。ドライバ616は、電気的に加熱されてもよく、フォークアセンブリ614の少なくとも一部を溶融して、フォークアセンブリ614を取り外すことができる。
いくつかの実施形態では、外側シース612が機械的に破壊可能である。
いくつかの実施形態では、ピボット615が機械的に破壊可能である。
いくつかの実施形態では、ドライバ616が外側シース612に近い点で機械的に破壊可能である。
当業者は、上述の分離が本出願における他の実施形態に適用されてもよいことを理解すべきである。
いくつかの実施形態では、フォーク614が異なる長さを有する遠位アームを備える。
いくつかの実施形態では、フォーク614が異なる長さを有する近位アームを備える。
いくつかの実施形態では、係合部分618が戻り止め620が圧縮され、レシーバ610から取り外されるのを助けるためのスロット622を備える。
いくつかの実施形態では、係合部分618がレシーバ610の取り外しを補助するための隆起626を備える。クリップアセンブリが組織をクリップ留めするとき、組織は、クリップアセンブリが完全に閉じられることを防止する。フォークがさらに閉じられると、バンプはポケット624の縁部を押圧し、係合解除を補助する。
クリップアセンブリは、クリップ710と、ロック機構720と、駆動アセンブリ(カテーテルアセンブリ)730と、解放部分714と、一対の顎部702と、を備える。
図35bは、閉/応力/ロック位置にあるクリップアセンブリとその駆動アセンブリを示す。
図35cは、リリース/取り外し位置にあるクリップアセンブリとその駆動アセンブリを示している。クリップアセンブリは、駆動アセンブリによって開位置から閉位置へ、およびその逆に自由に移動することができる。クリップアセンブリは、応力/ロック位置に入ると、再び開くことができない。
いくつかの実施形態では、解放部分714がクリップ710の近位端から少なくとも1つの側部開口部を有する受容チャンバ770を備える。
いくつかの実施態様では、コネクタ734はT字型シリンダであり、受容チャンバ770はT字型形状チャンバであり、T字型形状のコネクタを受け入れることができる。
いくつかの実施形態では、コネクタ734はボールであり、受容チャンバ770はボール状のチャンバであり、ボールコネクタ734を受け入れることができる。
いくつかの実施形態では、コネクタ734が示される立方体であり、受容チャンバ770は立方体様の形状のチャンバであり、立方体コネクタ734を受容することができる。
当業者は、コネクタ734および受容チャンバ770の形状が適切な接続および係合解除を可能にする任意の形状であり得ることを、合理的に理解すべきである。
当業者は、ピボットが1つ以上のピボット点から構成されてもよく、別個の部品であってもよく、または顎部702内の特徴から構成されてもよいことを合理的に理解すべきである。ピボット728は、顎部702の閉鎖を可能にする任意の適切な材料から構成され得る。顎部702は、ピボット728を介して連結された1つ以上のピースから構成され得る。ピボット728は、アセンブリの動作に必要な付加的な構成要素を含んでもよい。
いくつかの実施形態では、エラストマーバンドは排除され、ピボットは第1および第2の顎部が通常は開放されるように、共通のエラストマー構造を備える。
いくつかの実施形態では、エラストマーバンドは排除され、顎部は顎部の制御された開閉を可能にするロック機構に機械的に接続される。
いくつかの実施形態では、ロック機構720が外側部分上に保持ポケット729を備える。保持ポケット729は保持機構716の保持フィン757とインターロックし、これによりクリップ710を閉位置にロックする。
当業者は、ロック機構が顎部702の近位アームを広げるタスクを達成する、上記の実施形態に加えて、他の公知の設計または構成であり得ることを、合理的に理解すべきである。
クリップアセンブリ800は、第1の顎部802と、第2の顎部804と、ピボット806と、解放部分808と、ハウジング820と、を備える。
一実施形態では、第1の顎部802および第2の顎部804がピボット806に旋回可能に接続される。
当業者は、ピボット806が第1の顎部802、第2の顎部804、解放部分808、またはそれらの任意の組み合わせに、取り外し可能に取り付けられ得るか、またはそれらの一部であり得ることを理解するべきである。
ハウジング820は、内部チャネル822を備える。
第1の顎部802および第2の顎部804の両方の少なくとも一部は、内部チャネル822内に配置される。第1の顎部802および第2の顎部804は内部チャネル822と共に、完全閉鎖位置と完全開放位置との間で移動するように構成される。駆動アセンブリ900または駆動アセンブリ900のドライバがその遠位方向に向かって押されると、第1の顎部802および第2の顎部804が開く。駆動アセンブリ900または駆動アセンブリ900のドライバがその近位方向に向かって引っ張られると、第1の顎部802および第2の顎部804が閉じる。
第1および第2の顎部の両方は上記では移動顎部として記載されているが、当業者は第1の顎部が静止顎部であってもよいことを容易に理解すべきである。
当業者はまた、クリップアセンブリ800が3つ以上の顎部を備えてもよいことを理解すべきである。
遠位ストッパ824は内部チャネル822の遠位端836に、またはその近くに配置される。
いくつかの実施形態では、遠位ストッパ824がハウジング820を取り外し可能に通過するピンである。遠位ストッパ824は解放部分がその最も遠位の位置に移動するときに、第1の顎部802および第2の顎部804を完全に開放させるように構成される。遠位ストッパ824はまた、第1の顎部802および第2の顎部804がハウジング820から完全に脱落することを防止するように構成される。遠位ストッパ824はまた、第1の顎部802および第2の顎部804が、2つのアームを二等分する中心平面を横切ることを防止するように構成される。
近位ストッパ826は、内部チャネル822の近位端834またはその近くに配置される。
いくつかの実施形態では、近位ストッパ826が内部チャネル822に取り付けられたリングである。近位ストッパ826は、解放部分808がハウジング820から脱落するのを防止することができる。近位ストッパ826はTタグを取り外そうとするときに引っ張るために、顎部以外の梃の作用面を提供してもよい。応力は、このステップの位置に応じて、その近位ストッパと顎部のステップとの間でバランスをとることができる。
いくつかの実施形態では、全ての力が近位ストッパに作用することができる。
いくつかの実施形態では、全ての力が顎部に作用することができる。
いくつかの実施形態では、全ての力が近位ストッパと顎部との間で共有され得る。
いくつかの実施形態では、解放部分808がピボット806に旋回可能に接続される。
いくつかの実施形態では、解放部分808がピボット806に固定される。
いくつかの実施形態では、解放部分808がいずれかのアームまたは両方のアームに固定される。
いくつかの実施形態では、第1の顎部802および第2の顎部804が解放部分808の少なくとも一部の各側に配置される。解放部分808は駆動アセンブリ900を取り外し可能に受け入れるように構成され、その結果、駆動アセンブリ900または駆動アセンブリ900のドライバはクリップアセンブリ800を開放または閉鎖するように駆動することができる。
いくつかの実施形態では、第1の顎部802および第2の顎部804が標的組織を噛む。第1および第2の顎部802、804の少なくとも一方と内部チャネル822との間の摩擦は第1および第2の顎部802、804を閉じたままにし、咬まれた組織に対する止血力を得る。
いくつかの実施形態では、ハウジング820が少なくとも1つの整列スロット828を備える。
いくつかの実施形態では、ハウジング820が2つの位置合わせスロットを備える。整列スロット828は第1の顎部802が非閉位置にあるとき、第1の顎部802の少なくとも一部分を受け取るように構成される。
いくつかの実施形態では、整列スロット828が第1の顎部802の整列リブ830を受容するように構成される。整列スロット828は、第1の顎部802が意図しない不整列または回転を防止する。
いくつかの実施形態では、ハウジング820が第1の顎部802および第2の顎部804の両方のための2つの整列スロット828を備える。
いくつかの実施形態では、整列スロット828を有する内部チャネル822が整列リブ830を有する解放部分808を受容する。
いくつかの実施形態では、内部チャネル822および整列スロット828が一緒になって、解放部分808の対応する非円筒形状を受容する非円筒形状を形成する。
いくつかの実施態様では、整列スロット828は、ハウジング820上に配置され、解放部分808上にピン832を受け入れる。
いくつかの実施態様では、整列スロット828は、ハウジング820上に配置され、ピボット806を受け入れる。
当業者は、スロットがハウジングの外側から見える必要がなく、スロットが両側にある必要がなく、ピンが両側にある必要がなく、リブが両側にある必要がないことを理解すべきである。
内側チューブ904は、外側シース902内に移動可能に配置される。ドライバ906は、内側チューブ904内に移動可能に配置される。ドライバ906は、解放部分808に取り外し可能に接続して、駆動係合を形成する。ドライバ906はクリップアセンブリ800を開放と閉鎖との間で制御するために、その遠位方向とその近位方向との間で移動するように構成される。
駆動係合のいくつかの実施形態では、所定の引っ張り力に応じて、ドライバ906は解放部分808から分離する。このような所定の引っ張り力は、クリップアセンブリ800を閉じさせ、止血効果を達成する力よりも大きい。
いくつかの実施形態では、外側シース902の遠位端908および内側チューブ904がハウジング820の近位端834とのハウジング係合を形成する。
当業者は、デバイスのいくつかの実施形態において、駆動およびハウジング係合のうちの1つのみが必要とされることを理解すべきである。
図39を参照すると、いくつかの実施形態では、遠位端908が外側シース902の他の部分から分離することなく、360度完全に回転するように構成される。
いくつかの実施形態では、2つの対向するレッジから構成されるインターロックリブおよびチャンネル構造は、遠位端部から外れないようにし、なおかつ円形の回転を可能にする。
双方向の制御可能な回転のためには、クリップアセンブリと駆動アセンブリとの間に、クリップアセンブリの長軸に対して垂直でない界面がなければならない。これは、平坦な表面および/または湾曲した表面の組み合わせであってもよい。これは、全回転係合面として知られている。
回転係合のいくつかの実施形態では、係合部分の各半分が中心平面(クリップアセンブリの長軸と一致する)のいずれかの側に位置する、少なくとも2つの対向する回転係合面を有する特徴、または一組の特徴を有し、2方向に制御可能な回転を有する必要がある。一方向回転の場合、1つの回転係合面のみが必要となる場合がある。係合された回転係合は、回転して係合解除するように構成される。
これらの界面は、アセンブリの長軸に平行ではない。これは、平坦な表面および/または湾曲した表面の組み合わせであってもよい。これは、全プッシュ/プル係合面として知られている。いくつかの係合では、係合部分の各半分が少なくとも2つの対向する全プッシュ/プル係合表面を有する特徴または特徴のセットを有さなければならない。係合された係合は並進的に移動し、係合解除するように構成される。
当業者は駆動係合及びハウジング係合の構造がしばしば、何らかの適応的な変更を伴う/伴わないで交換可能であることを容易に理解すべきである。
本出願に記載される係合は、駆動係合および/またはハウジング係合に使用されるものとして当業者によって理解されるべきである。
いくつかの実施形態では、タグ910はTタグである。
当業者であれば、タグ910は、Y、片側LまたはJベンド、アイレット、または他の適切な形状であってもよいことを理解すべきである。タグ910は、解放部分808に受け入れられて、駆動係合を形成する。タグ910は、通常の使用下で安定したプッシュ及びプル動作を促進する。いったん離脱が要求されると、2つのt字型ワイヤは半径方向内側に移動し、これにより、ワイヤは解放部分808から滑り出ることが可能になり、したがって、完全な離脱が達成される。タグ910は、回転制御にも役立つ。
いずれかの側の全ての幾何学的形状は中心平面を横切って対称であってもよいし、非対称であってもよい。内側チューブを取り外すときに容易に離脱することを促進するための幾何学的形状は、後方角度、クリアランス、またはこの目的のための任意の他の適切な幾何学的形状の形態であってもよい。使用される幾何学的形状はクリップアセンブリおよび駆動アセンブリの外側から見えることも、見えないこともあり、外側材料内にあることもある。ハンドシェイクと内管の界面は、円筒形である必要はなく、整合形状である必要はない。
別の実施形態では、穴は解放部分上にあり、ボールは駆動アセンブリに含まれる。当業者は、ボールが、引っ張りワイヤが取り外されることなく、穴を通して除去することができない他のいかなるより大きな幾何形状によっても置き換えることができることを理解すべきである。
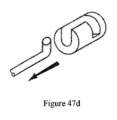
Lアームは、クリップアセンブリのハウジングに取り外し可能に取り付けられる。内側チューブは遠位方向に動き、Lアームを押し、Lアームを強制的に内側に動かし、係合解除することができる。Lアームは、テーパ、摩擦、又はオーバーモールドによってハウジングに取り付けることができる。また、Lアームは、内側チューブがない場合に係合を維持する幾何学的形状で自由に浮いていてもよい。
ドライバはドライバが時計回りに回転する場合にのみ、折りたたみ式の2つのプロジェクトで構成される。係合を維持するために、反時計回りに回転されると、インサートはスロット内に突出する。プロジェクトが時計回りに回転すると、プロジェクトがスロットから後退し、ドライバが外れるようになる。
係合すると、解放部の孔を通してCリングが挿入される。Cリングは、クリップアセンブリが脱落するまで引っ張られるように構成される。
内側のチューブは穴に挿入され、リリース部分を保持するために一定の吸引を使用する。吸引が停止されると、クリップアセンブリは係合解除される。
バルーンは、ソケット内に挿入され、係合が維持されるように膨張される。ソケット内の膨張したバルーンは収縮して係合解除される。
当業者はまた、バルーンが収縮ではなく膨張が構成要素の解放を生じさせるように、または外側から特徴を把持するように構成され得ることを理解すべきである。
ハウジングは、少なくとも1つの可撓性タブを含む。
外側シースは、保持スロットと、少なくとも1つの溝と、を備える。
柔軟なタブが固定スロットに収まり、ロックされる。溝は、外側シースの中心軸に実質的に沿っている。角度付けされたランプは、溝に沿って移動するように構成される。係合の解放が必要とされるとき、角度付きランプは、タブが保持スロットにもはや係合されない点まで、ロックタブを中心軸に向かって駆動する。その結果、係合は分離することができる。
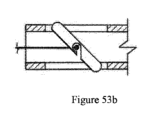
一実施形態では、保持バーが外側シースの一体部分であるレールである。保持バーは2つのカム間の位置合わせを維持し、それらが回転するのを防ぐ。2つのカムが(顎部を閉じてロックする方向に)遠位に引っ張られると、近位カムは保持バーを通過する位置に引っ張られ、近位カムが遠位カムに対して回転し、解放することを可能にする。カム角度は近位方向の力と関連して、回転を引き起こし、一旦、近位カムが十分に回転すると、ロックから解放される。
差し込みタブと曲げ可能なアームとは、互いに嵌合する。内側のチューブまたはドライバは、アームを曲げる方向に引っ張られ、タブを外す。これにより、今度は、ハウジングを外側シースから解放する。
本明細書において明確に除外されない限り、そのような組み合わせおよび部分的な組み合わせはすべて、一般的な発明概念の範囲内にあることが意図される。
さらに、本発明の様々な態様、概念、および特徴に関する様々な代替実施形態(代替材料、構造、構成、方法、回路、装置、および構成要素、形成、適合、および機能に関する代替など)を本明細書で説明することができるが、そのような説明は現在知られているか、または後に開発されるかにかかわらず、利用可能な代替実施形態の完全なまたは網羅的なリストであることを意図しない。
当業者は本発明の態様、概念、または特徴のうちの1つまたは複数を追加の実施形態に容易に採用し、そのような実施形態が本明細書で明示的に開示されていない場合であっても、一般的な本発明の概念の範囲内で使用することができる。
さらに、本発明のいくつかの特徴、概念、または態様が、好ましい配置または方法であるとして本明細書で説明され得るが、そのような説明は明示的にそのように述べられない限り、そのような特徴が必要または必要であることを示唆することを意図していない。
さらに、例示的または代表的な値および範囲は本開示の理解を助けるために含まれてもよいが、そのような値および範囲は限定的な意味で解釈されるべきではなく、そのように明示的に述べられた場合にのみ、臨界値または範囲であることが意図される。
さらに、様々な態様、特徴、および概念は本明細書では発明的であるか、または発明の一部を形成するものとして明確に識別され得るが、そのような識別は排他的であることを意図するものではなく、むしろ、そのようなものとして、または特定の発明の一部として明確に識別されることなく、本明細書で完全に説明される発明的態様、概念、および特徴が存在し得る。
例示的な方法またはプロセスの説明は、すべての場合に必要とされるものとしてすべてのステップを含むことに限定されず、また、ステップが提示される順序は明示的にそのように述べられない限り、必要または必要と解釈されるように提示される。
Claims (19)
- クリップアセンブリを備え、
前記クリップアセンブリは、第1の顎部と、第2の顎部と、内部チャネルを含むハウジングと、第1及び第2の顎部に接続する解放部分と、駆動アセンブリと、カラーと、を有し、
前記第1及び第2の顎部の少なくとも何れか一方には、保持フィンが設けられ、
前記ハウジングは、第1及び第2の顎部の少なくとも一部が前記内部チャネル内に配置され、第1及び第2の顎部は前記内部チャネルと共に、完全閉鎖位置と完全開放位置との間で選択的に移動し、
前記解放部分の少なくとも一部は、前記第1及び第2の顎部の近位に配置され、
前記カラーは、前記第1及び第2の顎部を完全閉鎖位置に維持するように、前記第1及び第2の顎部の近位端から前記第1及び第2の顎部の遠位端に向かって移動するように構成され、
前記保持フィンは、前記カラーが前記第1又は第2の顎部の遠位端から離れる方向に摺動するのを防止するように構成され、
前記駆動アセンブリは、外側シースと、前記外側シース内に移動可能に配置された内側チューブと、前記内側チューブ内に移動可能に配置され、近位端のケーブル及び遠位端のコネクタを備え、このコネクタが前記解放部分内に着脱可能に連結されるドライバと、を含み、
前記ドライバは、所定の引張り力によって、前記解放部分から壊れずに解放され、
前記ハウジングと前記外側シースとは、解放可能なハンドシェイク係合を形成し、
前記ハウジング内に延びる前記内側チューブは、前記ハンドシェイク係合が解除されることを防止する、内視鏡デバイス。 - 前記クリップアセンブリは、遠位ストッパをさらに有し、
前記遠位ストッパは、前記内部チャネルの遠位端に配置され、前記解放部分がその最遠位位置に移動すると、前記第1及び第2の顎部を完全に開くように構成する、請求項1に記載の内視鏡デバイス。 - 前記ドライバには、前記解放部分に収容されたTタグが設けられ、
前記Tタグの2本のワイヤが、半径方向内向きに選択的に移動し、所定の力で引かれると、前記解放部分から滑り出す、請求項1に記載の内視鏡デバイス。 - 前記クリップアセンブリは、患者の体内に残されている全ての構成要素に対して非導電性または非磁性の材料で形成されている、請求項1に記載の内視鏡デバイス。
- 前記クリップアセンブリは、ピボットを有し、前記第1及び第2の顎部は、前記ピボットを旋回可能に接続する、請求項1に記載の内視鏡デバイス。
- 前記解放部分は、前記ピボットに旋回可能に接続される、請求項5に記載の内視鏡デバイス。
- 前記解放部分は、前記ピボットに固定される、請求項5に記載の内視鏡デバイス。
- 前記第1及び第2の顎部は、前記解放部分の少なくとも一部の各側に配置される、請求項1に記載の内視鏡デバイス。
- 前記ハウジングは、整列スロットを含み、
前記整列スロットは、前記第1の顎部が非閉鎖位置にあるときに、前記第1の顎部の少なくとも一部を収容するように構成される、請求項1に記載の内視鏡デバイス。 - 前記整列スロットは、前記第1の顎部の整列リブを収容するように構成される、請求項9に記載の内視鏡デバイス。
- 前記ハウジングは、2つの前記整列スロットを含む、請求項9に記載の内視鏡デバイス。
- 前記内部チャネルの近位端又は前記外側シースの遠位端の内径と前記内側チューブの外径との間の差が、前記内視鏡デバイスの長軸に垂直に測定されたときに、総係合面の高さよりも小さい、請求項1に記載の内視鏡デバイス。
- 前記外側シースの遠位端は、前記外側シースの他の部分から分離することなく360度完全に回転するように構成される、請求項1に記載の内視鏡デバイス。
- 前記ハンドシェイク係合は、回転係合である、請求項1に記載の内視鏡デバイス。
- 前記ハンドシェイク係合は、並進係合である、請求項1に記載の内視鏡デバイス。
- 前記内部チャネルが、前記解放部分の少なくとも一部を受け入れ可能に、且つ前記解放部分が前記内部チャネル内で回転するのを防止するように構成されている、請求項1に記載の内視鏡デバイス。
- 前記第1及び第2の顎部は、一体に作られ、支点を介して接続される、請求項1に記載の内視鏡デバイス。
- 前記第1の顎部は、前記第2の顎部よりも長い、請求項1に記載の内視鏡デバイス。
- クリップアセンブリを備え、
前記クリップアセンブリは、第1の顎部と、第2の顎部と、駆動アセンブリと、カラーと、を有し、
前記第1及び第2の顎部は、完全閉鎖位置と完全開放位置との間で選択的に移動し、前記第1及び第2の顎部の少なくとも何れか一方には、保持フィンが設けられ、
前記カラーは、前記第1及び第2の顎部を完全閉鎖位置に維持するように、前記第1及び第2の顎部の近位端から前記第1及び第2の顎部の遠位端に向かって移動するように構成され、
前記保持フィンは、前記カラーが前記第1又は第2の顎部の遠位端から離れる方向に摺動するのを防止するように構成され、
前記駆動アセンブリの一部は、前記クリップアセンブリに取り外し可能に係合し、
前記クリップアセンブリは、非導電性または非磁性の材料で形成されている、内視鏡デバイス。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762586617P | 2017-11-15 | 2017-11-15 | |
| US62/586,617 | 2017-11-15 | ||
| US201862767353P | 2018-11-14 | 2018-11-14 | |
| US62/767,353 | 2018-11-14 | ||
| PCT/US2018/061321 WO2019099698A1 (en) | 2017-11-15 | 2018-11-15 | Clip and clip assembly |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021502861A JP2021502861A (ja) | 2021-02-04 |
| JP2021502861A5 JP2021502861A5 (ja) | 2021-12-16 |
| JP7330964B2 true JP7330964B2 (ja) | 2023-08-22 |
Family
ID=64572604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020526592A Active JP7330964B2 (ja) | 2017-11-15 | 2018-11-15 | クリップ及びクリップアセンブリ |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US11751882B2 (ja) |
| EP (1) | EP3709898B1 (ja) |
| JP (1) | JP7330964B2 (ja) |
| WO (1) | WO2019099698A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11413030B2 (en) * | 2018-11-08 | 2022-08-16 | William MONTROSS | Montross button |
| CN113194850A (zh) * | 2018-12-28 | 2021-07-30 | 奥林巴斯株式会社 | 结扎装置及卡合方法 |
| US11622765B2 (en) * | 2019-01-03 | 2023-04-11 | Olympus Corporation | Clipping device for large defects, perforations and fistulas |
| CN110464410A (zh) * | 2019-07-03 | 2019-11-19 | 安瑞医疗器械(杭州)有限公司 | 配合内窥镜使用的夹子装置及其夹持部 |
| WO2021156930A1 (ja) * | 2020-02-04 | 2021-08-12 | オリンパス株式会社 | アプリケータおよび結紮装置 |
| WO2022056223A1 (en) * | 2020-09-11 | 2022-03-17 | The Board Of Trustees Of The Leland Stanford Junior University | Devices and methods directed to sensing using synthetic materials |
| JP7426364B2 (ja) * | 2020-10-16 | 2024-02-01 | オリンパスメディカルシステムズ株式会社 | クリップ装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008526376A (ja) | 2005-01-11 | 2008-07-24 | ボストン サイエンティフィック サイムド, インコーポレイテッド | 止血用マルチクリップ展開装置 |
| JP2010511483A (ja) | 2006-12-05 | 2010-04-15 | ウィルソン−クック・メディカル・インコーポレーテッド | 併用療法止血クリップ |
| JP2010525879A (ja) | 2007-05-03 | 2010-07-29 | ボストン サイエンティフィック サイムド,インコーポレイテッド | 一段式止血クリップ留めデバイス |
| WO2016185965A1 (ja) | 2015-05-19 | 2016-11-24 | オリンパス株式会社 | クリップ装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4472217B2 (ja) | 2000-10-16 | 2010-06-02 | オリンパス株式会社 | 生体組織のクリップ装置 |
| JP4097924B2 (ja) * | 2001-02-05 | 2008-06-11 | オリンパス株式会社 | 生体組織のクリップ装置 |
| JP4059656B2 (ja) * | 2001-03-07 | 2008-03-12 | オリンパス株式会社 | 生体組織のクリップ装置 |
| JP4827304B2 (ja) * | 2001-03-14 | 2011-11-30 | オリンパス株式会社 | 生体組織のクリップ装置 |
| US7727247B2 (en) * | 2002-08-21 | 2010-06-01 | Olympus Corporation | Living tissue ligation device |
| DE10334083A1 (de) * | 2003-07-26 | 2005-02-24 | Carl Stahl Gmbh | Verfahren und Vorrichtung zur endoskopischen Applizierung von sich schließenden medizinischen Clips |
| JP4758173B2 (ja) | 2004-12-24 | 2011-08-24 | オリンパス株式会社 | 結紮装置 |
| EP1993452B1 (en) | 2006-03-10 | 2017-07-12 | Cook Medical Technologies LLC | A clip device and a protective cap for drawing the target tissue into it before the clip is deployed |
| JP5885506B2 (ja) * | 2009-02-17 | 2016-03-15 | ザ ボード オブ トラスティーズ オブ ザ レランド スタンフォード ジュニア ユニバーシティー | 縫合装置及び方法 |
| JP5588711B2 (ja) * | 2010-03-30 | 2014-09-10 | 富士フイルム株式会社 | 結紮装置 |
| CN103124530B (zh) * | 2010-09-22 | 2016-03-30 | 富士胶片株式会社 | 结扎装置和在该结扎装置中使用的夹子单元 |
| JP5343113B2 (ja) * | 2011-09-15 | 2013-11-13 | 富士フイルム株式会社 | クリップユニット及びこれを用いる結紮装置 |
| US20130226200A1 (en) | 2012-02-28 | 2013-08-29 | Boston Scientific Scimed, Inc. | Clip applier |
| WO2016190190A1 (ja) * | 2015-05-27 | 2016-12-01 | オリンパス株式会社 | 内視鏡用処置具 |
-
2018
- 2018-11-15 JP JP2020526592A patent/JP7330964B2/ja active Active
- 2018-11-15 US US16/192,202 patent/US11751882B2/en active Active
- 2018-11-15 WO PCT/US2018/061321 patent/WO2019099698A1/en unknown
- 2018-11-15 EP EP18812575.1A patent/EP3709898B1/en active Active
-
2023
- 2023-07-24 US US18/357,715 patent/US20230363764A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008526376A (ja) | 2005-01-11 | 2008-07-24 | ボストン サイエンティフィック サイムド, インコーポレイテッド | 止血用マルチクリップ展開装置 |
| JP2010511483A (ja) | 2006-12-05 | 2010-04-15 | ウィルソン−クック・メディカル・インコーポレーテッド | 併用療法止血クリップ |
| JP2010525879A (ja) | 2007-05-03 | 2010-07-29 | ボストン サイエンティフィック サイムド,インコーポレイテッド | 一段式止血クリップ留めデバイス |
| WO2016185965A1 (ja) | 2015-05-19 | 2016-11-24 | オリンパス株式会社 | クリップ装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190150929A1 (en) | 2019-05-23 |
| EP3709898A1 (en) | 2020-09-23 |
| WO2019099698A1 (en) | 2019-05-23 |
| US20230363764A1 (en) | 2023-11-16 |
| JP2021502861A (ja) | 2021-02-04 |
| EP3709898B1 (en) | 2021-09-22 |
| US11751882B2 (en) | 2023-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7330964B2 (ja) | クリップ及びクリップアセンブリ | |
| AU2013226309B2 (en) | Omnidirectional closure clip | |
| JP7315638B2 (ja) | 組織を引き込む為の装置および方法 | |
| US20220000485A1 (en) | Tissue clip devices, systems, and traction methods | |
| JP2023534025A (ja) | 内視鏡粘膜下切開に用いる磁気的に取り付け可能な生体組織クリップ | |
| CN111526804A (zh) | 双支撑钳口设计 | |
| JP2023162219A (ja) | 止血クリップの短縮化システム | |
| JP2019520904A (ja) | 止血クリップの為の再搭載可能なアプリケータ | |
| US20200146686A1 (en) | Clip and clip assembly | |
| JP2022535011A (ja) | 組織クリッピング装置 | |
| US20230263533A1 (en) | Clip, system, and clip deployment method | |
| US20230277193A1 (en) | Tissue closure method, clip device, and operation method of clip device | |
| WO2023037486A1 (ja) | 締結装置、内視鏡システム、および縫合方法 | |
| KR20240005090A (ko) | 콜릿 전개가능한 지혈 클립 | |
| CN117396143A (zh) | 可重新定位的内镜吻合夹 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211104 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211104 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221227 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230320 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230517 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230718 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230809 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7330964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |