JP7309911B2 - 骨手術用器具 - Google Patents
骨手術用器具 Download PDFInfo
- Publication number
- JP7309911B2 JP7309911B2 JP2021562571A JP2021562571A JP7309911B2 JP 7309911 B2 JP7309911 B2 JP 7309911B2 JP 2021562571 A JP2021562571 A JP 2021562571A JP 2021562571 A JP2021562571 A JP 2021562571A JP 7309911 B2 JP7309911 B2 JP 7309911B2
- Authority
- JP
- Japan
- Prior art keywords
- bone
- axis
- slit
- osteotomy
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/14—Surgical saws ; Accessories therefor
- A61B17/15—Guides therefor
- A61B17/151—Guides therefor for corrective osteotomy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/17—Guides or aligning means for drills, mills, pins or wires
- A61B17/1739—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body
- A61B17/1764—Guides or aligning means for drills, mills, pins or wires specially adapted for particular parts of the body for the knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B2017/564—Methods for bone or joint treatment
- A61B2017/565—Methods for bone or joint treatment for surgical correction of axial deviation, e.g. hallux valgus or genu valgus
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Engineering & Computer Science (AREA)
- Dentistry (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Prostheses (AREA)
Description
さらに、脛骨の骨切り術の他の方法として、粗面部の遠位部を円弧状に骨切りするDTAO(Distal Tibia Tuberosity Arc Osteotomy)が提案されている。粗面部よりも遠位側で脛骨を離断する非特許文献1の方法とは異なり、DTAOでは、脛骨の骨端部と骨幹部との間の連続性が維持されるように、粗面部の遠位部を途中まで前後方向に骨切りする。
本発明の一態様は、骨の特定点回りの周方向に骨切り刃を案内する骨手術用器具であって、前記特定点に位置決めされる中心部と、該中心部を通る軸線回りの周方向に延びるスリットを有するガイド部であって、前記スリットが、前記ガイド部を前記軸線に平行な方向に貫通し、前記スリット内に挿入された前記骨切り刃を前記軸線回りの周方向に案内する、ガイド部と、固定部材を使用して前記骨に固定される固定部とを備える骨手術用器具である。
また、骨手術用器具は、スリットの幅よりも薄い様々な骨切り刃と組み合わせることができるので、汎用性の高い骨手術用器具を提供することができる。
すなわち、中心部を脛骨の骨端部のヒンジ点に位置決めすることによって、ヒンジ点を中心とする円弧状または略円弧状のラインに沿って、粗面部の遠位部を正確にかつ簡便に骨切りすることができる。
骨切り刃の先端の刃先のスリットからの突出量は、ガイド部の厚さによって制限される。上記構成によれば、スリットからの刃先の突出量を所定量以下に制限することによって、軸線に平行な方向の過度な骨切りを防止することができる。
骨切り術において、骨の特定点に、位置および方向の基準となるピンが挿入されることがある。ピン孔内を通るピンによって中心部は特定点に位置決めされ、スリットの深さ方向はピンの長手軸の方向と平行になる。したがって、ピンの長手軸に平行な骨切り面を形成することができる。
この構成によれば、骨手術用器具を骨上に配置した状態で中心部を通る軸線に交差する面に沿って切削器具で骨切りするとき、切削器具の固定部材との干渉を防止することができる。
この構成によれば、スリット内に骨切り刃が挿入された状態においてスリットの内側に適度な空間的余裕が形成される。これにより、切削時の骨切り刃のブレを軽減しながら、骨切り刃のスリットの内面との干渉を防止することができる。
この構成によれば、X線透視下において、ガイド部の像からスリットの位置を正確に把握することができる。したがって、中心部を通る軸線に交差する面に沿ってスリットの位置まで骨切りする骨切り術において、スリットの位置を超えて過度に骨切りしてしまうことを防止することができる。
骨手術用器具が配置される骨の表面は、凸の曲面である。上記構成によれば、凹面が骨の表面に接触するように骨手術用器具を骨上に配置することによって、骨手術用器具を骨に対してより安定的に位置決めすることができ、骨切り時の骨手術用器具のブレを軽減することができる。
この構成によれば、中心部を通る軸線に沿う方向に見た平面視において、骨手術用器具は、支柱部に対して対称な略T字形状を有する。このような形状により、骨上に配置された骨手術用器具が傾いてしまうことを防止し、骨に対して骨手術用器具をより安定的に配置することができる。
円弧状のスリットによる案内に従って骨切りした後、円弧状の骨切り線に沿って、骨切り刃の厚さに応じた空隙が形成される。上記構成によれば、特定点と骨切り線との間の距離が、骨切り線の全長にわたって同一である。したがって、空隙の幅を一定に維持しながら、特定点を含む骨片を特定点回りに回転させることができる。すなわち、空隙を隔てて相互に対向する2つの骨面が回転中に相互に干渉することがなく、骨片を容易に回転させることができる。
この構成によれば、中心部とスリットとの間の距離が、スリットの一端から他端に向かって周方向に漸次減少するので、特定点と骨切り線との間の距離も、骨切り線の一端から他端に向かって漸次減少する。したがって、特定点を含む骨片を特定点回りに回転させるにつれて、空隙が次第に狭くなる。これにより、骨片の回転による骨の矯正後、空隙を隔てて相互に対向する2つの骨面同士を接触させるために必要な骨の圧迫および変形を軽減できる。
この構成によれば、平行面上を可動するタイプの骨切り刃であっても、スリットによって容易に案内することができる。
この構成によれば、中心部回りの周方向に連続的に配列する複数の直角三角形を用いて、複数の直線部からなり曲率半径が漸次短くなるスリットの形状を容易に設計することができる。
この構成によれば、特定点を含む骨片を所定の角度だけ回転させる毎に、空隙が、所定の長さずつ狭くなる。したがって、骨切り刃の厚さおよび特定点を含む骨片の矯正角度に応じて所定の角度および所定の長さを設計することによって、回転後の空隙の幅が所望の寸法となるように容易に設計することができる。
この構成によれば、粗面部の遠位部の骨切りにおいて、円弧状または略円弧状の骨切り線の膝蓋腱との干渉を防止することができる。また、骨切り線よりも近位側に位置する粗面部の骨切り部に十分な広さを確保することができ、骨切り部を固定するための骨ねじを骨切り部に容易に挿入することができる。
上記態様において、前記可動部が、前記軸線に直交する平面に沿って前記骨切り刃を案内する第2ガイド部を備えていてもよい。
本実施形態に係る骨手術用器具1は、骨の特定点回りの周方向に延びる円弧状または略円弧状のラインに沿って骨切りする骨切り術に使用される。本実施形態においては、骨切り術の一例として、脛骨Aの粗面部Bを略L字状に骨切りするDTAO(Distal Tibia Tuberosity Arc Osteotomy)について説明する。骨手術用器具1は、DTAOに限らず、他の任意の骨切り術にも使用することができる。
次に、脛骨Aの内側からヒンジ点Hに向かって脛骨Aが骨切りされ、骨切り線Lが形成される。
参照する図面において、脛骨Aの右側が内側であり、脛骨Aの左側が外側であり、紙面に垂直な方向が前後方向である。
次に、開大部に、人工骨または自家骨が移植される。
次に、粗面部Bの骨切り部に圧迫を加えて下面Eおよび側面Fを隣接する骨面と接触させた状態で、粗面部Bの骨切り部が骨ねじ等で後方の骨A2に固定される。
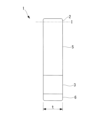
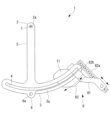
図1Aは、中心部2を通る所定の軸線Iに沿う方向に見た骨手術用器具1の平面図であり、図1Bは、図1Aの骨手術用器具1を右側から見た側面図である。
骨手術用器具1は、切削器具との摩耗を考慮し、ステンレス鋼、チタンまたはチタン合金から形成されることが好ましい。
スリット4を囲むガイド部3の縁部の肉厚dは、全周にわたって略均一である。肉厚dは、ガイド部3のスリムな構造と、それによるX線透視画像でのガイド部3の視認性との観点から、1mmから5mmであることが好ましい。
ヒンジ点Hから、側面Fを形成すべき粗面部Bの遠位部までの距離には、患者間の個人差がある。したがって、患者毎に適切なサイズの骨手術用器具1を選択することができるように、距離rが相互に異なる複数のサイズの骨手術用器具1が用意されていることが好ましい。
具体的には、ガイド部3の厚さtは、骨切り刃の先端のスリット4からの突出量が所定量以下になるように、骨切り刃の長さに応じて設計される。例えば、厚さtは、骨切り刃の長さよりも5mmから25mmだけ小さいことが好ましい。
また、軸線Iに直交する径方向におけるスリット4の幅wは、スリット4内での骨切り刃のがたつきを防止するために、骨切り刃の厚さよりも0.5mmから1.5mmだけ大きいことが好ましい。
図1Aおよび図1Bの骨手術用器具1は、全体にわたって一定の厚さを有するが、中心部2、ガイド部3、支柱部5および固定部6が、相互に異なる厚さを有していてもよい。
まず、図2に示されるように、骨切りの準備として、ガイドワイヤGWおよびヒンジピンP1を脛骨Aに挿入する。具体的には、脛骨Aに内側からヒンジ点Hに向かってガイドワイヤGWを挿入する。ヒンジ点Hは、脛骨Aの外側縁の近傍に設定される。脛骨Aの前後方向に並ぶ2本のガイドワイヤGWを相互に平行に脛骨Aに挿入してもよい。次に、ヒンジ点Hに脛骨Aの前後方向にヒンジピンP1を挿入する。
また、固定部6は、ガイド部3に対して中心部2の反対側に位置する。したがって、粗面部Bの後方を骨切りする際に、骨鋸が固定孔6aを通る固定ピンP2と干渉することを防止することができる。
次に、ガイドワイヤGWに沿って脛骨Aを内側から外側に向かって骨切りする。これにより、骨切り線Lに沿って3つ目の骨切り面が形成される。
スリット4が一定の曲率半径を有するので、側面Fおよび凹面Gは、ヒンジ点Hを中心とし一定の曲率半径をそれぞれ有する曲面である。したがって、空隙の幅は、骨切り部のヒンジ点H回りの回転角度に関わらず一定に維持される。すなわち、側面Fは、凹面Gとの間に一定の距離を常に保ちながら凹面Gに沿ってスライドし、側面Fの凹面Gとの干渉が防止される。これにより、骨切り部をヒンジ点H回りに容易に回転させることができる。
次に、骨切り部に前後方向および脛骨軸に沿う方向に圧迫を加えて下面Eおよび側面Fを隣接する骨面と接触させた状態で、骨切り部を骨ねじ等で後方の骨に固定する。
また、骨手術用器具1は、スリット4の幅wよりも厚さが小さい様々な骨切り刃と組み合わせることができ、汎用性の高い骨手術用器具1を提供することができる。
これに対し、本実施形態によれば、脛骨Aに過度な負荷をかけることなく、かつ、骨切り刃の回転中心である中心部2をヒンジ点Hに一致させた状態で、骨切りすることができる。
また、本実施形態において、スリット4が、全長にわたって滑らかに湾曲することとしたが、これに代えて、図5および図6に示されるように、周方向に相互に連続し、軸線Iを中心とする円周の接線方向または略接線方向にそれぞれ延びる複数の直線部4aから構成されていてもよい。
また、スリット4を直線部4aから構成することによって、平行面上を移動する骨切り刃を使用する場合、骨切り刃とスリット4の内面との干渉を防止することができる。
この場合、骨切り部をヒンジ点H回りに所定の角度θ’だけ回転させたときに、空隙の幅が長さΔrだけ狭くなる。したがって、所定の角度θ’が矯正角度θと等しく、長さΔrが骨切りによって生じる側面Fと凹面Gとの間の空隙の幅と等しい場合、骨切り部を矯正角度θだけ回転させた後、側面Fと凹面Gとが相互に接触し空隙がなくなる。すなわち、矯正後、脛骨Aに負担をかけることなく側面Fを凹面Gに接触させることができる。
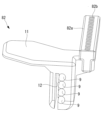
可動部8は、ガイド部3に連結される第1部分81と、第1部分81に連結される第2部分82とを有する。
連結構造は上記の構造に限定されるものではなく、ガイド部3に対して上下方向および径方向の第1部分81の位置が安定し、かつ、第1部分81がガイド部3に対して周方向に移動可能である限りにおいて、任意に変更可能である。上下方向は、軸線Iに平行な方向である。
ピン孔2aおよびガイド孔9を利用することによって、既に脛骨Aに挿入されているガイドワイヤGWに対して所定の位置にヒンジピンP1を挿入することが可能となる、または、既に脛骨Aに挿入されているヒンジピンP1に対して所定の位置にガイドワイヤGWを挿入することが可能となる。
ガイド孔9がガイドスリーブGSを案内するものである場合、図9Cおよび図9Dに示されるように、第2部分82は、ガイドワイヤGWの直径よりも大きな幅を有しガイド孔9と平行に延びるスリット13を有していてもよい。
第1部分81に対して第2部分82を位置決めする位置決め機構が設けられていてもよい。例えば、第1部分81にボールプランジャ(図示略)が設けられ、スライダ82aに、一列に並びボールプランジャをそれぞれ受ける複数の穴82bが設けられていてもよい。第1部分81に対して第2部分82をより強い力で一時的に固定するために、固定ねじ等の固定部材がさらに設けられていてもよい。
第2部分82は、第1部分81に対して固定されていてもよい。この場合、可動部8は、必ずしも2つの部分81,82から構成される必要は無く、単一の部材から構成されていてもよい。
2 中心部
2a ピン孔
3 ガイド部
4 スリット
5 支柱部
6 固定部
6a 固定孔
7 接触面、凹面
8 可動部
9 ガイド孔
11 第2ガイド部
A 脛骨
B 粗面部
GW ガイドワイヤ
H ヒンジ点(特定点)
I 軸線
P2 固定ピン(固定部材)
Claims (17)
- 骨の特定点回りの周方向に骨切り刃を案内する骨手術用器具であって、
前記特定点に位置決めされる中心部と、
該中心部を通る軸線回りの周方向に延びるスリットを有するガイド部であって、前記スリットが、前記ガイド部を前記軸線に平行な方向に貫通し、前記スリット内に挿入された前記骨切り刃を前記軸線回りの周方向に案内する、ガイド部と、
固定部材を使用して前記骨に固定される固定部とを備え、
前記中心部が、前記軸線に平行な方向に前記中心部を貫通するピン孔を有する、骨手術用器具。 - 骨の特定点回りの周方向に骨切り刃を案内する骨手術用器具であって、
前記特定点に位置決めされる中心部と、
該中心部を通る軸線回りの周方向に延びるスリットを有するガイド部であって、前記スリットが、前記ガイド部を前記軸線に平行な方向に貫通し、前記スリット内に挿入された前記骨切り刃を前記軸線回りの周方向に案内する、ガイド部と、
固定部材を使用して前記骨に固定される固定部と、
前記中心部と前記ガイド部とを相互に接続する支柱部とを備える骨手術用器具。 - 骨の特定点回りの周方向に骨切り刃を案内する骨手術用器具であって、
前記特定点に位置決めされる中心部と、
該中心部を通る軸線回りの周方向に延びるスリットを有するガイド部であって、前記スリットが、前記ガイド部を前記軸線に平行な方向に貫通し、前記スリット内に挿入された前記骨切り刃を前記軸線回りの周方向に案内する、ガイド部と、
固定部材を使用して前記骨に固定される固定部とを備え、
前記スリットが、前記軸線回りの周方向に曲率半径が漸次小さくなる曲線に沿って延びる、骨手術用器具。 - 骨の特定点回りの周方向に骨切り刃を案内する骨手術用器具であって、
前記特定点に位置決めされる中心部と、
該中心部を通る軸線回りの周方向に延びるスリットを有するガイド部であって、前記スリットが、前記ガイド部を前記軸線に平行な方向に貫通し、前記スリット内に挿入された前記骨切り刃を前記軸線回りの周方向に案内する、ガイド部と、
固定部材を使用して前記骨に固定される固定部と、
前記軸線回りの周方向に移動可能に前記ガイド部に連結される可動部とを備え、
該可動部は、前記軸線に直交する径方向に平行な方向に貫通し、前記軸線に向かってガイドワイヤまたは該ガイドワイヤが挿入されるガイドスリーブを案内するガイド孔を有し、
該ガイド孔を貫通する前記ガイドワイヤの外周面が、前記軸線および前記ガイド孔の中心軸線に直交するオフセット方向に前記軸線から離間した位置に配置される、骨手術用器具。 - 脛骨の粗面部の遠位部を円弧状または略円弧状に骨切りするために使用される、請求項1から請求項4のいずれかに記載の骨手術用器具。
- 前記ガイド部の前記軸線に平行な方向の厚さは、10mm以上25mm以下である、請求項1から請求項5のいずれかに記載の骨手術用器具。
- 前記固定部が、前記ガイド部に対して前記中心部とは反対側に設けられている、請求項1から請求項6のいずれかに記載の骨手術用器具。
- 前記スリットの幅が、1mm以上2mm以下である、請求項1から請求項7のいずれかに記載の骨手術用器具。
- 前記軸線に沿う方向に見た平面視において、前記ガイド部の外形が、前記スリットの形状と相似または略相似であり、
前記スリットを囲む前記ガイド部の縁部の肉厚が、1mmから5mmである、請求項1から請求項8のいずれかに記載の骨手術用器具。 - 前記軸線に沿う方向の一側に前記骨の表面と接触する接触面を有し、
該接触面が、前記骨の表面の形状と適合する凹面である、請求項1から請求項9のいずれかに記載の骨手術用器具。 - 前記支柱部が、前記中心部と前記ガイド部の前記周方向の中央との間で、前記軸線に交差する方向に延びる、請求項2に記載の骨手術用器具。
- 前記スリットが、一定の曲率半径を有する円弧に沿って延びる、請求項1、請求項2または請求項4に記載の骨手術用器具。
- 前記スリットが、前記軸線回りの周方向に相互に連続する複数の直線部からなり、該複数の直線部の各々が、前記軸線を中心とする円周の接線方向または略接線方向に延びる、請求項3に記載の骨手術用器具。
- 各前記直線部の両端および前記中心部を頂点とする三角形が、前記直線部を底辺とする直角三角形であり、
一の直角三角形の対辺と、該一の直角三角形と隣接する他の一の直角三角形の斜辺とが共通である、請求項13に記載の骨手術用器具。 - 前記中心部と前記スリットとの間の距離が、前記軸線回りの周方向に所定の角度だけ変位する毎に所定の長さだけ短くなる、請求項3または請求項13に記載の骨手術用器具。
- 前記中心部と前記スリットとの間の距離が、45mmから65mmである、請求項1から請求項15のいずれかに記載の骨手術用器具。
- 前記可動部が、前記軸線に直交する平面に沿って前記骨切り刃を案内する第2ガイド部を備える、請求項4に記載の骨手術用器具。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019220047 | 2019-12-05 | ||
| JP2019220047 | 2019-12-05 | ||
| PCT/JP2020/043425 WO2021111907A1 (ja) | 2019-12-05 | 2020-11-20 | 骨手術用器具 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021111907A1 JPWO2021111907A1 (ja) | 2021-06-10 |
| JPWO2021111907A5 JPWO2021111907A5 (ja) | 2022-07-28 |
| JP7309911B2 true JP7309911B2 (ja) | 2023-07-18 |
Family
ID=76222204
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021562571A Active JP7309911B2 (ja) | 2019-12-05 | 2020-11-20 | 骨手術用器具 |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP4070741A4 (ja) |
| JP (1) | JP7309911B2 (ja) |
| CN (1) | CN114760937A (ja) |
| TW (1) | TWI769597B (ja) |
| WO (1) | WO2021111907A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006158972A (ja) | 2004-12-07 | 2006-06-22 | Depuy Products Inc | 骨整形器具およびその使用方法 |
| JP2007029657A (ja) | 2005-07-29 | 2007-02-08 | Koji Hasegawa | 骨切りガイド |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4320678A (en) * | 1980-03-10 | 1982-03-23 | Volk Michael J | Portable power tool accessory table |
| WO2007064051A1 (en) * | 2005-11-29 | 2007-06-07 | Jeil Medical Corporation | Guiding instrument for mandible angle reduction surgery |
| JP4796943B2 (ja) * | 2006-11-20 | 2011-10-19 | 日本メディカルマテリアル株式会社 | 脛骨近位端の骨切り用ガイド器具 |
| CN104000634B (zh) * | 2014-06-16 | 2016-01-13 | 南通舟可信息科技有限公司 | 一种股骨粗隆间截骨的组合装置及其使用方法 |
| KR101685790B1 (ko) * | 2015-03-12 | 2016-12-12 | 고택수 | 근위경골 절골술용 가이드장치 |
| TWM523427U (zh) * | 2015-12-08 | 2016-06-11 | 陳俊名 | 一種高位脛骨截骨手術器械 |
| US10751071B2 (en) * | 2016-04-25 | 2020-08-25 | Imds Llc | Joint fusion instrumentation and methods |
| CN107149490A (zh) * | 2017-05-18 | 2017-09-12 | 汤向阳 | 一种人工全髋关节置换的成套定位装置 |
| US11602355B2 (en) * | 2017-12-22 | 2023-03-14 | Medacta International Sa | Cutting guide for periacetabular osteotomy and kit for periacetabular osteotomy |
-
2020
- 2020-11-20 WO PCT/JP2020/043425 patent/WO2021111907A1/ja unknown
- 2020-11-20 EP EP20897311.5A patent/EP4070741A4/en active Pending
- 2020-11-20 JP JP2021562571A patent/JP7309911B2/ja active Active
- 2020-11-20 CN CN202080083395.XA patent/CN114760937A/zh active Pending
- 2020-11-26 TW TW109141515A patent/TWI769597B/zh active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006158972A (ja) | 2004-12-07 | 2006-06-22 | Depuy Products Inc | 骨整形器具およびその使用方法 |
| JP2007029657A (ja) | 2005-07-29 | 2007-02-08 | Koji Hasegawa | 骨切りガイド |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4070741A1 (en) | 2022-10-12 |
| TWI769597B (zh) | 2022-07-01 |
| JPWO2021111907A1 (ja) | 2021-06-10 |
| WO2021111907A1 (ja) | 2021-06-10 |
| EP4070741A4 (en) | 2023-12-20 |
| CN114760937A (zh) | 2022-07-15 |
| TW202128091A (zh) | 2021-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11696767B2 (en) | Alignment guides, cut guides, systems and methods of use and assembly | |
| US10888335B2 (en) | Bone cutting guide systems and methods | |
| US9526541B2 (en) | Flexible intramedullary rod | |
| JP6410792B2 (ja) | 足関節置換システムおよび方法 | |
| JPH02239861A (ja) | 膝移植用の脛骨表面形削りガイド | |
| US20100049200A1 (en) | Femoral guide for acl repair having adjustable offset | |
| JP2021146219A (ja) | 骨切削用の案内装置及び方法 | |
| JP4417303B2 (ja) | 骨切りガイド | |
| JP5646627B2 (ja) | スタイラス組立体 | |
| JP2007075517A (ja) | 人工膝関節設置用ジグ | |
| JP4943341B2 (ja) | ドリルガイド組立体 | |
| WO2013025194A1 (en) | Subtalar joint prosthesis and its method of implantation | |
| JP2004537368A (ja) | 大腿骨切除平面の位置を定めるガイド | |
| JP7309911B2 (ja) | 骨手術用器具 | |
| JP3183614U (ja) | 人工膝関節置換手術用器具 | |
| JP7189758B2 (ja) | 手術器具及び手術器具システム | |
| WO2023140292A1 (ja) | 骨切り術支援治具、デジタルテンプレート及び長管骨矯正骨切り術 | |
| JP7174463B1 (ja) | 骨切り術用開大装置 | |
| KR101890150B1 (ko) | 십자인대 재건술용 가이드기구 | |
| JP6336811B2 (ja) | 人工膝関節設置用ジグ | |
| KR20200119121A (ko) | 경골 근위부 절골술용 결속구 | |
| WO2012001782A1 (ja) | 大腿骨顆部切除キット、大腿骨遠位端面切除具、及び大腿骨顆部後面切除具 | |
| JPH0650609U (ja) | 大腿骨切除用ガイド |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220601 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220601 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230523 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230613 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230705 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7309911 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |