JP7261069B2 - ロボットハンド、ロボット及びロボットシステム - Google Patents
ロボットハンド、ロボット及びロボットシステム Download PDFInfo
- Publication number
- JP7261069B2 JP7261069B2 JP2019074447A JP2019074447A JP7261069B2 JP 7261069 B2 JP7261069 B2 JP 7261069B2 JP 2019074447 A JP2019074447 A JP 2019074447A JP 2019074447 A JP2019074447 A JP 2019074447A JP 7261069 B2 JP7261069 B2 JP 7261069B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- robot hand
- claw
- article
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G61/00—Use of pick-up or transfer devices or of manipulators for stacking or de-stacking articles not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/904—Devices for picking-up and depositing articles or materials provided with rotary movements only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/03—Stacking of articles by adding to the top of the stack from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G59/00—De-stacking of articles
- B65G59/02—De-stacking from the top of the stack
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G59/00—De-stacking of articles
- B65G59/02—De-stacking from the top of the stack
- B65G59/023—De-stacking from the top of the stack by means insertable between the stacked articles or layers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2814/00—Indexing codes relating to loading or unloading articles or bulk materials
- B65G2814/03—Loading or unloading means
- B65G2814/0301—General arrangements
- B65G2814/0304—Stacking devices
- B65G2814/0305—Adding to the top
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2814/00—Indexing codes relating to loading or unloading articles or bulk materials
- B65G2814/03—Loading or unloading means
- B65G2814/0301—General arrangements
- B65G2814/0308—Destacking devices
- B65G2814/031—Removing from the top
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
- De-Stacking Of Articles (AREA)
- Specific Conveyance Elements (AREA)
Description
図1は、実施の形態に係るロボットシステム1の構成の一例を示す図である。図1に示すように、本実施の形態では、ロボットシステム1は、ロボット100を用いて物品Aを搬送するシステムである。例えば、ロボット100は、搬送装置等によって搬送されてきた物品Aを所定の場所に載置し積み上げることができる。また、ロボット100は、所定の場所に積み上げられた物品Aの山から物品Aを取り出し、他の装置等に載置する。以下において、ロボット100が搬送する物品Aは、直方体状の段ボールケースであるとして説明するが、これに限定されない。搬送対象の物品は、後述するロボットハンド120が把持することができる物体であればよく、例えば、所定の形状を有する他の物体であってもよく、岩石等の所定の形状を有しない物体であってもよい。
図1に示すように、ロボット100は、ロボットアーム110と、ロボットアーム110の先端に取り付けられるロボットハンド120と、ロボットアーム110及びロボットハンド120の動作を制御する制御装置130とを備える。本実施の形態では、ロボット100は、垂直多関節型ロボットとして構成されるが、これに限定されない。
図1に示すように、操作装置210は、オペレータPによって入力される指令に基づきロボット100、搬送車240及びコンベヤロボット250を遠隔操作する。操作装置210の具体的な構成は特に限定されないが、操作装置210はオペレータPによる入力を受け付ける入力装置を備える。入力装置の例は、ハンドル、レバー、ペダル、ボタン、タッチパネル、マイク及びカメラ等であるが、これらに限定されない。操作装置210は、入力装置を介して入力された操作に対応する指令を制御装置130に出力する。操作装置210は、有線通信又は無線通信を介して制御装置130と接続される。有線通信及び無線通信の形式はいかなる形式であってもよい。
図1に示すように、撮像装置220は、ロボット100、搬送車240及びコンベヤロボット250の動作状態を撮像し、撮像した画像の信号を出力装置230に出力する。撮像装置220によって撮像される画像は、静止画であってもよく動画であってもよい。撮像装置220の例は、デジタルカメラ及びデジタルビデオカメラである。撮像装置220は、有線通信又は無線通信を介して操作装置210及び出力装置230と接続される。撮像装置220は、操作装置210に入力される指令に従って、撮像の実行及び停止、並びに、撮像方向の変更等の動作を行ってもよい。
図1に示すように、出力装置230は、撮像装置220から取得される画像の信号を画像として出力しオペレータPに表示する表示装置である。出力装置230の例は、液晶ディスプレイ(Liquid Crystal Display)及び有機又は無機ELディスプレイ(Electro-Luminescence Display)であるが、これらに限定されない。出力装置230は、制御装置130によって出力される操作等のための画像を表示してもよい。
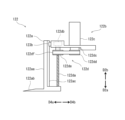
[ロボットアーム110の構成]
ロボット100のロボットアーム110の詳細な構成を説明する。図2は、実施の形態に係るロボット100の構成の一例を示す斜視図である。図2に示すように、ロボット100のロボットアーム110は、その基端部で搬送車240に固定されている。ロボットアーム110の先端部には、ロボットハンド120が接続されている。多関節型のロボットアーム110は、6つの関節軸JT1~JT6と、これらの関節軸によって順次連結される6つのリンク110a~110fとを有する。さらに、ロボットアーム110は、関節軸JT1~JT6それぞれを回転駆動するアーム駆動装置AM1~AM6を有している。アーム駆動装置AM1~AM6の動作は、制御装置130によって制御される。これに限定されないが、本実施の形態では、アーム駆動装置AM1~AM6はそれぞれ、電力を動力源とし、これらを駆動する電気モータとしてサーボモータを有する。なお、ロボットアーム110の関節軸の数量は、6つに限定されず、7つ以上であってもよく、1つ以上5つ以下であってもよい。
ロボット100のロボットハンド120の詳細な構成を説明する。図3は、実施の形態に係るロボットハンド120の構成の一例を示す側面図である。図4は、実施の形態に係るロボットハンド120の第一把持部121の構成の一例を示す側面図である。図5は、実施の形態に係るロボットハンド120の第二把持部122の構成の一例を示す側面図である。
制御装置130の構成を説明する。制御装置130は、操作装置210から受け取る操作の指令等に基づき、予め記憶部(図示せず)に格納されるプログラムに従って、ロボットアーム110、ロボットハンド120、搬送車240及びコンベヤロボット250の動作を制御する。制御装置130は、ロボットアーム110、ロボットハンド120、搬送車240及びコンベヤロボット250の動作を個別に制御するのではなく互いにリンクさせて制御を行い、互いに連携させた動作を実現する。例えば、制御装置130は、ロボットアーム110、ロボットハンド120、搬送車240及びコンベヤロボット250の1つの制御に、他の3つから取得される情報を反映させる。
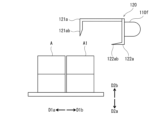
ロボットシステム1の第一の動作を説明する。第一の動作は、上下に積み上げられた物品Aのうちの最上段の物品A1を、ロボットハンド120を用いて搬出する動作である。第一の動作は、オペレータPが操作装置210を用いて、ロボット100及び搬送車240に各動作を行わせる、マスタースレーブ方式の動作であるとする。この場合、例えば、操作装置210は、オペレータPの手元にあるマスターアームを構成し、ロボット100は、遠隔のスレーブアームを構成してもよい。そして、オペレータPによって与えられるマスターアームの動作を、スレーブアームがトレースするように構成される。これにより、オペレータPが所望する動作をスレーブアームに正確に実現させることが容易である。また、オペレータPは、マスターアームを介して、スレーブアームの動作を容易に知覚することができる。
ロボットシステム1の第二の動作を説明する。第二の動作は、床面に載置された物品A1を、ロボットハンド120を用いて搬出する動作である。第二の動作も、マスタースレーブ方式の動作であるとする。図14及び図15はそれぞれ、実施の形態に係るロボットシステム1の第二の動作の1つを示す側面図である。第二の動作におけるロボット移動ステップ、ハンド移動ステップ及び爪接触ステップは、第一の動作と同様である。
上述したように、実施の形態に係るロボットハンド120は、第一爪部121abを有する第一把持部121と、第一爪部121abと共に物品を挟持することで当該物品を把持する第二把持部122と、第一爪部121abと第二把持部122とを接近させる又は離す第一方向D1に、第一爪部121abを移動させる第一駆動装置121bとを備える。第一爪部121abは、隣り合って配置された物品間の隙間に挿入可能である形状を有する。
実施の形態の変形例1に係るロボットハンド120Aを説明する。変形例1に係るロボットハンド120Aは、物体を検出するセンサを第一把持部121A及び第二把持部122Aに備える点で、実施の形態と異なる。以下、変形例1について、実施の形態と異なる点を中心に説明し、実施の形態と同様の点の説明を適宜省略する。
実施の形態の変形例2に係るロボットハンド120Bを説明する。変形例2に係るロボットハンド120Bは、第三把持部128を備える点で、実施の形態及び変形例1と異なる。以下、変形例2について、実施の形態及び変形例1と異なる点を中心に説明し、実施の形態及び変形例1と同様の点の説明を適宜省略する。
図18は、変形例2に係るロボットハンド120Bの構成の一例を示す側面図である。図18に示すように、ロボットハンド120Bは、第三把持部128を備え、第三把持部128は、ベース123に取り付けられ支持される。本変形例では、第三把持部128は、第一把持部材121aと第二把持部材122aとの間に配置される。第三把持部128は、制御装置130の制御に従って、第一把持部121及び第二把持部122から独立して動作する。
本変形例に係るロボットシステム1の動作を説明する。具体的には、第二の動作を説明する。図19~図22はそれぞれ、変形例2に係るロボットシステム1の第二の動作の1つを示す側面図である。本変形例におけるロボット移動ステップ、ハンド移動ステップ及び爪接触ステップは、実施の形態の第二の動作と同様である。
以上、本発明の実施の形態の例について説明したが、本発明は、上記実施の形態に限定されない。すなわち、本発明の範囲内で種々の変形及び改良が可能である。例えば、各種変形を実施の形態に施したもの、及び、異なる実施の形態における構成要素を組み合わせて構築される形態も、本発明の範囲内に含まれる。
100 ロボット
110 ロボットアーム
120,120A,120B ロボットハンド
121,121A 第一把持部
121ab 第一爪部
121b 第一駆動装置
121c,122c アクチュエータ
122,122A 第二把持部
122ab 第二爪部
122b 第二駆動装置
130 制御装置(検出装置)
210 操作装置
AM1~AM6 アーム駆動装置
Claims (12)
- 物品を把持するロボットハンドであって、
第一方向に延びる第一本体部と、前記第一本体部から前記第一方向と交差する方向に延 びる第一爪部とを有する第一把持部と、
前記第一爪部と共に物品を挟持することで前記物品を把持する第二把持部と、
前記第一方向に前記第一本体部を移動させる第一駆動装置とを備え、
前記第一方向は、前記第一爪部と前記第二把持部とを接近させる又は離す方向であり、
前記第一爪部は、隣り合って配置された前記物品間の隙間に挿入可能である形状を有する
ロボットハンド。 - 前記第二把持部が有する第二爪部を第二方向に移動させる第二駆動装置をさらに備え、
前記第二方向は、前記第一方向と交差する方向であり、且つ前記第一爪部と前記第二把持部とにより挟持される前記物品に前記第二爪部を接近させる又は離す方向である
請求項1に記載のロボットハンド。 - 物品を把持するロボットハンドであって、
第一爪部を有する第一把持部と、
前記第一爪部と共に物品を挟持することで前記物品を把持する第二把持部と、
前記第一爪部と前記第二把持部とを接近させる又は離す第一方向に、前記第一爪部及び 前記第二把持部の少なくとも一方を移動させる第一駆動装置と、
前記第二把持部が有する第二爪部を第二方向に移動させる第二駆動装置とを備え、
前記第二方向は、前記第一方向と交差する方向であり、且つ前記第一爪部と前記第二把 持部とにより挟持される前記物品に前記第二爪部を接近させる又は離す方向であり、
前記第一爪部は、隣り合って配置された前記物品間の隙間に挿入可能である形状を有す る
ロボットハンド。 - 前記第二爪部は、隣り合って配置された前記物品間の隙間に挿入可能である形状を有する
請求項2または3に記載のロボットハンド。 - 前記第一爪部が、隣り合って配置された前記物品間の隙間に対応する位置にあることを検出する検出装置をさらに備える
請求項1~4のいずれか一項に記載のロボットハンド。 - 前記ロボットハンドは、サーボモータを有するアーム駆動装置によって駆動される複数の関節を有するロボットアームと接続され、
前記検出装置は、
前記アーム駆動装置の動作に関する情報を取得し、
前記アーム駆動装置の動作に関する情報を用いて、前記第一爪部が、隣り合って配置された前記物品間の隙間に対応する位置にあることを検出する
請求項5に記載のロボットハンド。 - 物品を把持するロボットハンドであって、
第一爪部を有する第一把持部と、
前記第一爪部と共に物品を挟持することで前記物品を把持する第二把持部と、
前記第一爪部と前記第二把持部とを接近させる又は離す第一方向に、前記第一爪部及び 前記第二把持部の少なくとも一方を移動させる第一駆動装置と、
前記第一爪部が、隣り合って配置された前記物品間の隙間に対応する位置にあることを 検出する検出装置とを備え、
前記第一爪部は、隣り合って配置された前記物品間の隙間に挿入可能である形状を有し 、
前記ロボットハンドは、サーボモータを有するアーム駆動装置によって駆動される複数 の関節を有するロボットアームと接続され、
前記検出装置は、
前記アーム駆動装置の動作に関する情報を取得し、
前記アーム駆動装置の動作に関する情報を用いて、前記第一爪部が、隣り合って配置さ れた前記物品間の隙間に対応する位置にあることを検出する
ロボットハンド。 - 前記ロボットハンドの前記駆動装置は、駆動力を発生するアクチュエータを有する
請求項1~7のいずれか一項に記載のロボットハンド。 - 前記アクチュエータは、電力を動力源とする
請求項8に記載のロボットハンド。 - 請求項1~9のいずれか一項に記載のロボットハンドと、
前記ロボットハンドと接続されたロボットアームと、
前記ロボットハンド及び前記ロボットアームの動作を制御する制御装置とを備える
ロボット。 - 前記ロボットアームは、サーボモータを有するアーム駆動装置によって駆動される複数の関節を有し、
前記ロボットハンドの前記駆動装置は、駆動力を発生するアクチュエータとしてサーボモータを有し、
前記制御装置は、前記ロボットハンドの前記駆動装置の前記サーボモータの動作と、前記アーム駆動装置の前記サーボモータの動作とを制御する
請求項10に記載のロボット。 - 請求項10または11に記載のロボットと、
前記ロボットを操作するための操作装置とを備える
ロボットシステム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019074447A JP7261069B2 (ja) | 2019-04-09 | 2019-04-09 | ロボットハンド、ロボット及びロボットシステム |
| KR1020217036166A KR102662077B1 (ko) | 2019-04-09 | 2020-04-09 | 로봇핸드, 로봇 및 로봇시스템 |
| CN202080027251.2A CN113661138B (zh) | 2019-04-09 | 2020-04-09 | 机器人手、机器人以及机器人系统 |
| PCT/JP2020/015970 WO2020209333A1 (ja) | 2019-04-09 | 2020-04-09 | ロボットハンド、ロボット及びロボットシステム |
| TW109112049A TWI736216B (zh) | 2019-04-09 | 2020-04-09 | 機器人手、機器人及機器人系統 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019074447A JP7261069B2 (ja) | 2019-04-09 | 2019-04-09 | ロボットハンド、ロボット及びロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020172358A JP2020172358A (ja) | 2020-10-22 |
| JP7261069B2 true JP7261069B2 (ja) | 2023-04-19 |
Family
ID=72751263
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019074447A Active JP7261069B2 (ja) | 2019-04-09 | 2019-04-09 | ロボットハンド、ロボット及びロボットシステム |
Country Status (5)
| Country | Link |
|---|---|
| JP (1) | JP7261069B2 (ja) |
| KR (1) | KR102662077B1 (ja) |
| CN (1) | CN113661138B (ja) |
| TW (1) | TWI736216B (ja) |
| WO (1) | WO2020209333A1 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7513500B2 (ja) * | 2020-11-10 | 2024-07-09 | オークラ輸送機株式会社 | ハンド装置、物品移送装置および物品取出方法 |
| JP7466435B2 (ja) * | 2020-11-24 | 2024-04-12 | 川崎重工業株式会社 | ロボット及び物品寸法取得方法 |
| EP4026662A1 (en) * | 2021-01-11 | 2022-07-13 | Robotautomation Svenska AB | Object transfer device and a robot system including the object transfer device |
| JP2022142300A (ja) * | 2021-03-16 | 2022-09-30 | 株式会社東芝 | 荷役装置用の把持装置、及び、荷役装置 |
| JP6944227B1 (ja) * | 2021-03-26 | 2021-10-06 | 株式会社RoboSapiens | 突出型リニアアクチュエータ、ロボットアーム及び輸送ロボット |
| TWI802224B (zh) * | 2022-01-14 | 2023-05-11 | 國立臺北科技大學 | 使用音圈馬達的法蘭裝置及其接觸控制方法 |
| CN116040197B (zh) * | 2022-12-29 | 2025-12-09 | 华南农业大学 | 一种用于多包裹装卸的传送带型末端执行器 |
| CN117163649B (zh) * | 2023-09-28 | 2025-12-12 | 北京配天技术有限公司 | 一种压叶装置 |
| GB202314987D0 (en) * | 2023-09-29 | 2023-11-15 | Ocado Innovation Ltd | De-palletiser and palletiser |
| CN118544380B (zh) * | 2024-07-24 | 2024-10-25 | 广东若贝特智能机器人科技有限公司 | 一种协作机器人用末端夹持装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015132720A1 (en) | 2014-03-04 | 2015-09-11 | Sir S.P.A. | Gripper with movable jaw and suction device |
| JP2020040788A (ja) | 2018-09-11 | 2020-03-19 | 株式会社東芝 | 搬送装置、搬送システム及び搬送方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2605824Y2 (ja) * | 1993-09-14 | 2000-08-21 | エヌオーケー株式会社 | トルク伝達装置 |
| JPH07251942A (ja) * | 1994-03-15 | 1995-10-03 | Mitsubishi Electric Corp | 荷扱い装置 |
| JPH1025029A (ja) | 1996-07-05 | 1998-01-27 | Ishikawajima Harima Heavy Ind Co Ltd | 移載ロボット用ロボットハンド |
| US20070280812A1 (en) * | 2006-05-17 | 2007-12-06 | Axium Inc. | Tool and method for mixed palletizing/depalletizing |
| CN201432811Y (zh) * | 2009-03-10 | 2010-03-31 | 广东一鼎科技有限公司 | 墙地砖自动装箱生产线的上砖机构 |
| DE102015116720B4 (de) * | 2015-10-01 | 2019-03-07 | Deutsche Post Ag | Verfahren und Vorrichtung zum Fördern von Stückgütern von einem Stapel oder Haufen |
| FR3041947B1 (fr) * | 2015-10-06 | 2020-02-07 | Sapelem | Procede et dispositif de manipulation de charge, appele colis |
| JP6710622B2 (ja) * | 2015-11-13 | 2020-06-17 | 株式会社東芝 | 搬送装置および搬送方法 |
| CN106976717A (zh) * | 2016-01-18 | 2017-07-25 | 刘文化 | 一种机器人抓取整体物料的系统 |
| CN206691998U (zh) * | 2017-03-24 | 2017-12-01 | 石狮市巨灵机械科技有限公司 | 一种自动码垛机 |
-
2019
- 2019-04-09 JP JP2019074447A patent/JP7261069B2/ja active Active
-
2020
- 2020-04-09 CN CN202080027251.2A patent/CN113661138B/zh active Active
- 2020-04-09 TW TW109112049A patent/TWI736216B/zh active
- 2020-04-09 KR KR1020217036166A patent/KR102662077B1/ko active Active
- 2020-04-09 WO PCT/JP2020/015970 patent/WO2020209333A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015132720A1 (en) | 2014-03-04 | 2015-09-11 | Sir S.P.A. | Gripper with movable jaw and suction device |
| JP2020040788A (ja) | 2018-09-11 | 2020-03-19 | 株式会社東芝 | 搬送装置、搬送システム及び搬送方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113661138A (zh) | 2021-11-16 |
| WO2020209333A1 (ja) | 2020-10-15 |
| JP2020172358A (ja) | 2020-10-22 |
| KR20210149798A (ko) | 2021-12-09 |
| TWI736216B (zh) | 2021-08-11 |
| TW202042990A (zh) | 2020-12-01 |
| KR102662077B1 (ko) | 2024-05-07 |
| CN113661138B (zh) | 2023-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7261069B2 (ja) | ロボットハンド、ロボット及びロボットシステム | |
| JP7220115B2 (ja) | ロボットハンド、ロボット及びロボットシステム | |
| JP6983524B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| US9604357B2 (en) | Robot and device having multi-axis motion sensor, and method of use thereof | |
| TWI794989B (zh) | 基於速度控制的機器人系統、控制一機器人系統之方法、及體現於一非暫時性電腦可讀媒體之電腦程式產品 | |
| CN104249374B (zh) | 机器人手、机器人、机器人系统、机器人手的控制方法 | |
| WO2017033351A1 (ja) | 遠隔操作ロボットシステム | |
| JP2015085458A (ja) | ロボット制御装置、ロボットシステム、及びロボット | |
| US10960542B2 (en) | Control device and robot system | |
| CN102049778A (zh) | 机器人系统以及工件取出方法 | |
| US20210016439A1 (en) | Learning device, robot control system, and learning control method | |
| JP2011167815A (ja) | 物体認識ロボットシステム | |
| US11840410B2 (en) | Robotic system and method of stacking and unstacking wood boards and related materials and of stacking wood spacers and related materials | |
| JP2005262369A (ja) | ロボットシステム | |
| CN113573996B (zh) | 机器人手、机器人以及机器人系统 | |
| CN110024509A (zh) | 部件安装装置及其控制方法 | |
| JP6314431B2 (ja) | ロボットシステム、制御装置、ロボット、及び駆動方法 | |
| JP2020163483A (ja) | ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220316 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230407 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7261069 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |