JP7202372B2 - 圧電駆動ユニット - Google Patents
圧電駆動ユニット Download PDFInfo
- Publication number
- JP7202372B2 JP7202372B2 JP2020519443A JP2020519443A JP7202372B2 JP 7202372 B2 JP7202372 B2 JP 7202372B2 JP 2020519443 A JP2020519443 A JP 2020519443A JP 2020519443 A JP2020519443 A JP 2020519443A JP 7202372 B2 JP7202372 B2 JP 7202372B2
- Authority
- JP
- Japan
- Prior art keywords
- contact
- drive unit
- resonator
- axis
- passive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005284 excitation Effects 0.000 claims description 14
- 239000000725 suspension Substances 0.000 claims description 11
- 230000008878 coupling Effects 0.000 claims description 9
- 238000010168 coupling process Methods 0.000 claims description 9
- 238000005859 coupling reaction Methods 0.000 claims description 9
- 238000005452 bending Methods 0.000 claims description 2
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 230000003534 oscillatory effect Effects 0.000 claims description 2
- 230000010355 oscillation Effects 0.000 claims 1
- 239000013598 vector Substances 0.000 description 8
- 239000000463 material Substances 0.000 description 4
- 238000005304 joining Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000004026 adhesive bonding Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
- H02N2/006—Elastic elements, e.g. springs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0095—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing combined linear and rotary motion, e.g. multi-direction positioners
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
Description
したがって、駆動ユニットは、能動要素に対して受動要素を駆動するように構成され、能動要素は、各々が基準面に平行に延伸し、接触要素において終端する、2つのアームを有する共振器を備え、接触要素は、アームの振動運動によって可動であり、結果、受動要素を駆動する。プレストレス要素が、能動要素と受動要素との間に相対的な力を及ぼすように配置され、基準面に垂直なプレストレス力によってそれらを互いに対して圧迫する。
共振器および共振器内の振動を励起するための少なくとも1つの励起手段を備え、
共振器は、接続領域の同じ側において共振器の接続領域から延伸する少なくとも2つのアームを備え、
共振器およびアームは基準面に平行に延伸し、
各アームは、アームの外端に接触要素を備え、
接触要素は、アームの振動運動によって可動であり、
受動要素は、これらの振動運動によって能動要素に対して駆動され、動かされるように構成されており、
受動要素は、接触領域を備え、各接触領域は、それぞれの接触要素と接触するように配置される。
第1の接触領域は、第1の表面に隣接するところに第1のアームの第1の接触縁、および、第2の表面に隣接するところに第1のアームの第2の接触縁を備え、
第2の接触領域は、第1の表面に隣接するところに第2のアームの第1の接触縁、および、第2の表面に隣接するところに第2のアームの第2の接触縁を備える。
第1の接触領域は、第1のアームの第1の接触縁のみと接触し、第2の接触領域は、第2のアームの第1の接触縁のみと接触する。
基準面に垂直な、第1の接触領域と第1の接触要素との間に作用するプレストレス力の成分、
および
基準面に垂直な、第2の接触領域と第2の接触要素との間に作用するプレストレス力の成分
は、同じ方向にある。
共振器および共振器内の振動を励起するための少なくとも1つの励起手段を備え、
共振器は、接続領域の同じ側において共振器の接続領域から延伸する少なくとも2つのアームを備え、
共振器およびアームは基準面に平行に延伸し、
各アームは、アームの外端に接触要素を備え、
接触要素は、アームの振動運動によって可動であり、
受動要素は、これらの振動運動によって能動要素に対して駆動され、動かされるように構成されており、
受動要素は、接触領域を備え、各接触領域は、それぞれの接触要素と接触するように配置される。
本発明の主題は、以下を概略的に示す、添付の図面に例示される例示的な実施形態を参照して、以下の本文においてより詳細に説明される。
図1は、能動要素1および受動要素4を有する駆動ユニットの要素を分解図で概略的に示す。能動要素1は、共振器2または共振器プレート2および2つの励起手段23を備える。共振器2の接続領域20から、第1のアーム21および第2のアーム22が、共振器軸24に対応して同じ方向に延伸する。各アームの端部には、受動要素4の第1の接触領域41および第2の接触領域42に接触することにより受動要素4に接触し、動かすように設計されたそれぞれの第1の接触要素31および第2の接触要素32がある。これらの接触領域は、動く受動要素4に対して必ずしも固定された関係にあるわけではなく、受動要素4が回転運動軸25(図1)を中心として回転するか、または、(他の実施形態では)能動要素1に対して並進するときに、接触領域31、32が現在、受動要素4に接触している位置である。
Claims (15)
- 能動要素(1)に対して受動要素(4)を駆動するための駆動ユニットであって、前記能動要素(1)は、
共振器(2)および前記共振器(2)内の振動を励起するための少なくとも1つの励起手段(23)を備え、
前記共振器(2)は、前記共振器(2)の接続領域(20)の同じ側において前記接続領域(20)から延伸する少なくとも2つのアーム(21、22)を備え、
前記共振器(2)および前記アーム(21、22)は基準面(28)に平行に延伸し、 各前記アーム(21、22)は、前記アームの外端に接触要素(31、32)を備え、 前記接触要素(31、32)は、前記アーム(21、22)の振動運動によって可動であり、
前記受動要素(4)は、前記振動運動によって前記能動要素(1)に対して駆動され、動かされるように構成されており、
前記受動要素(4)は、接触領域(41、42)を備え、各接触領域(41、42)は、それぞれの前記接触要素(31、32)と接触するように配置される駆動ユニットにおいて、
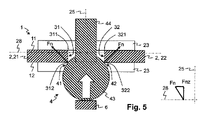
プレストレス要素(6)が、前記能動要素(1)と前記受動要素(4)との間に相対的な力を及ぼすように配置され、結果、各接触領域(41、42)は、前記基準面(28)に垂直な成分(Fnz)を有するプレストレス力(Fn)によってそれぞれの前記接触要素(31、32)に対して圧迫され、
前記共振器(2)は、両方とも前記基準面(28)に平行な第1の表面および対向する第2の表面を含み、前記第1の接触領域(41)および前記第2の接触領域(42)は、前記接触要素(31、32)の接触縁(311、312、321、322)のみと接触するように配置され、前記接触縁(311、312、321、322)は、前記接触要素(31、32)がそれぞれ前記第1の表面および前記第2の表面に隣接するところに配置される、駆動ユニット。 - 前記プレストレス要素(6)は、前記共振器(2)に取り付けられ、前記基準面(28)に垂直な方向に前記受動要素(4)を圧迫するように配置される、請求項1に記載の駆動ユニット。
- 前記プレストレス要素(6)は、さらなる能動要素(1’)によって形成される、請求項1に記載の駆動ユニット。
- 前記さらなる能動要素(1’)および前記能動要素(1)の前記共振器(2)が、一体に製造される、請求項3に記載の駆動ユニット。
- 前記プレストレス要素(6)は、前記能動要素(1)のサスペンションの一部、または前記受動要素(4)のサスペンションの一部、または両方の一部である、請求項1に記載の駆動ユニット。
- 前記受動要素(4)は、回転運動軸(25)を中心として回転するように構成され、前記回転運動軸(25)は、前記基準面(28)に垂直である、請求項1~5のいずれか1項に記載の駆動ユニット。
- 前記第1の接触領域(41)と前記第1の接触要素(31)との間に作用するプレストレス力および前記第2の接触領域(42)と前記第2の接触要素(32)との間に作用するプレストレス力の前記基準面(28)に垂直な前記成分(Fnz)は、同じ方向にある、請求項6に記載の駆動ユニット。
- 前記受動要素(4)の接触体(43)は、回転運動軸(25)に対して回転対称であり、前記軸(25)に沿って変化する直径を有し、前記第1の接触領域(41)および前記第2の接触領域(42)は、前記軸(25)に沿った、直径が増大する領域に位置する、請求項6または7のいずれか1項に記載の駆動ユニット。
- 前記受動要素(4)の接触体(43)は、前記回転運動軸(25)に沿って検討したとき、前記直径が増加するとともに、前記能動要素(1)の前記アームと接触する第1の区画と、前記直径が減少するとともに、前記さらなる能動要素(1’)の前記アームと接触している第2の区画とを備える、請求項4または5に依存する、請求項6~8のいずれか1項に記載の駆動ユニット。
- 前記受動要素(4)は、回転直線運動軸(25’)を中心として回転するように配置され、前記回転直線運動軸(25’)は、共振器軸(24)に本質的に平行であり、前記2つの能動要素(1、1’)の鏡面対称配置の対称面内にある、請求項3または4に記載の駆動ユニット。
- 前記受動要素(4)は、直線運動軸(26)に沿って並進するように構成され、前記直線運動軸(26)は、前記基準面(28)に平行である、請求項1~5のいずれか1項に記載の駆動ユニット。
- 前記第1の接触領域(41)と前記第1の接触要素(31)との間に作用するプレストレス力、および、前記第2の接触領域(42)と前記第2の接触要素(32)との間に作用するプレストレス力は、平行かつ反対方向である、請求項11に記載の駆動ユニット。
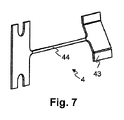
- 前記プレストレス力は、前記共振器軸(24)に垂直な方向に延伸する部材(44)の曲げをもたらす、請求項11または12に記載の駆動ユニット。
- 前記プレストレス力は、前記共振器軸(24)に平行に延伸する連結部(44)のねじれをもたらす、請求項11または12に記載の駆動ユニット。
- 請求項1~14のいずれか1項に記載のものである、
前記共振器(2)が、第3の接触領域(45)において前記受動要素(4)の接触体(43)に接触するように構成されているベアリング要素(7)を備えることを特徴とする、駆動ユニット。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17194747.6 | 2017-10-04 | ||
| EP17194747.6A EP3468028A1 (en) | 2017-10-04 | 2017-10-04 | Piezoelectric drive unit |
| PCT/EP2018/076790 WO2019068708A2 (en) | 2017-10-04 | 2018-10-02 | TRAINING UNIT |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020536484A JP2020536484A (ja) | 2020-12-10 |
| JP2020536484A5 JP2020536484A5 (ja) | 2021-10-21 |
| JP7202372B2 true JP7202372B2 (ja) | 2023-01-11 |
Family
ID=60037395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020519443A Active JP7202372B2 (ja) | 2017-10-04 | 2018-10-02 | 圧電駆動ユニット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11456682B2 (ja) |
| EP (2) | EP3468028A1 (ja) |
| JP (1) | JP7202372B2 (ja) |
| WO (1) | WO2019068708A2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3736965A1 (en) * | 2019-05-10 | 2020-11-11 | Miniswys Sa | Drive unit and method for operating a drive unit |
| JP2022532184A (ja) * | 2019-05-10 | 2022-07-13 | ミニスイス・ソシエテ・アノニム | 駆動ユニット、および駆動ユニットを動作させるための方法 |
| EP3787178A1 (en) | 2019-08-30 | 2021-03-03 | Miniswys Sa | Piezoelectric drive unit |
| US20230024495A1 (en) | 2019-12-13 | 2023-01-26 | Miniswys S.A. | Driving-unit operation method and controller |
| EP3836390A1 (en) | 2019-12-13 | 2021-06-16 | Miniswys Sa | Method for operating a drive unit and drive unit |
| US20230143336A1 (en) * | 2020-04-16 | 2023-05-11 | Miniswys Sa | Drive unit |
| WO2022218989A1 (en) * | 2021-04-15 | 2022-10-20 | Miniswys Sa | Oscillating drive element and drive unit |
| EP4075661A1 (en) * | 2021-04-15 | 2022-10-19 | Miniswys Sa | Oscillating drive element and drive unit |
| JP2023043037A (ja) * | 2021-09-15 | 2023-03-28 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッド | 超音波モータ |
| EP4311097A1 (en) | 2022-07-22 | 2024-01-24 | Miniswys Sa | Shock resistant drive unit |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001041228A1 (de) | 1999-11-29 | 2001-06-07 | Creaholic Sa | Piezoelektrischer antrieb |
| JP2004140941A (ja) | 2002-10-18 | 2004-05-13 | Asmo Co Ltd | 複自由度駆動装置 |
| JP2007135309A (ja) | 2005-11-10 | 2007-05-31 | Toyota Industries Corp | 多自由度超音波モータ |
| JP2008220171A (ja) | 2004-06-24 | 2008-09-18 | Miniswys Sa | 駆動装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63294279A (ja) * | 1987-05-25 | 1988-11-30 | Hiroshi Shimizu | 圧電駆動装置 |
| JP3190613B2 (ja) * | 1997-03-31 | 2001-07-23 | セイコーインスツルメンツ株式会社 | 圧電アクチュエータ |
| US6664714B2 (en) * | 2000-03-23 | 2003-12-16 | Elliptec Resonant Actuator Ag | Vibratory motors and methods of making and using same |
| DE102013107154B4 (de) * | 2013-07-08 | 2020-09-10 | Physik Instrumente (Pi) Gmbh & Co. Kg | Antriebsvorrichtung |
| JP2015118027A (ja) * | 2013-12-19 | 2015-06-25 | セイコーエプソン株式会社 | 振動素子、電子デバイス、電子機器および移動体 |
| CH709292A3 (de) | 2014-02-20 | 2015-10-15 | Miniswys Sa | Positioniervorrichtung für einen Bildstabilisator. |
-
2017
- 2017-10-04 EP EP17194747.6A patent/EP3468028A1/en not_active Withdrawn
-
2018
- 2018-10-02 WO PCT/EP2018/076790 patent/WO2019068708A2/en unknown
- 2018-10-02 US US16/753,168 patent/US11456682B2/en active Active
- 2018-10-02 JP JP2020519443A patent/JP7202372B2/ja active Active
- 2018-10-02 EP EP18825563.2A patent/EP3692626B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001041228A1 (de) | 1999-11-29 | 2001-06-07 | Creaholic Sa | Piezoelektrischer antrieb |
| JP2003516100A (ja) | 1999-11-29 | 2003-05-07 | クレアホリック・ソシエテ・アノニム | 圧電ドライブ |
| JP2004140941A (ja) | 2002-10-18 | 2004-05-13 | Asmo Co Ltd | 複自由度駆動装置 |
| JP2008220171A (ja) | 2004-06-24 | 2008-09-18 | Miniswys Sa | 駆動装置 |
| JP2007135309A (ja) | 2005-11-10 | 2007-05-31 | Toyota Industries Corp | 多自由度超音波モータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020536484A (ja) | 2020-12-10 |
| US20200252007A1 (en) | 2020-08-06 |
| WO2019068708A3 (en) | 2019-06-06 |
| EP3468028A1 (en) | 2019-04-10 |
| EP3692626B1 (en) | 2022-03-16 |
| US11456682B2 (en) | 2022-09-27 |
| WO2019068708A2 (en) | 2019-04-11 |
| EP3692626A2 (en) | 2020-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7202372B2 (ja) | 圧電駆動ユニット | |
| JP2020536484A5 (ja) | ||
| KR101108455B1 (ko) | 초음파 모터 | |
| JP2006311790A (ja) | 振動波駆動装置 | |
| JP2013223406A (ja) | 振動子、振動波駆動装置及び振動子の製造方法 | |
| JP4452275B2 (ja) | 圧電電気機械式駆動装置 | |
| KR930009211A (ko) | 초음파 모우터 | |
| JPH1146486A (ja) | 振動アクチュエータおよび振動アクチュエータにおける振動体の締結部材の製造方法 | |
| JP2019531877A (ja) | 側面取付部を有する超音波振動システム | |
| US20230143336A1 (en) | Drive unit | |
| JPH0532991B2 (ja) | ||
| US20220216851A1 (en) | Drive unit and method for operating a drive unit | |
| JP4282487B2 (ja) | 圧電モータおよび圧電モータを駆動するための方法 | |
| EP3736965A1 (en) | Drive unit and method for operating a drive unit | |
| JP2002291263A5 (ja) | ||
| JP2022546059A (ja) | 圧電駆動ユニット | |
| CN116802986A (zh) | 超声波电机 | |
| JPH0965674A (ja) | 振動アクチュエータ | |
| JP2023521472A (ja) | 駆動ユニット | |
| JPH08182351A (ja) | 超音波アクチュエータ | |
| EP4075661A1 (en) | Oscillating drive element and drive unit | |
| CN110061653A (zh) | 振动型马达和透镜驱动装置 | |
| WO2022218989A1 (en) | Oscillating drive element and drive unit | |
| JP4910381B2 (ja) | 駆動装置、駆動システム及び駆動方法 | |
| JPH07178370A (ja) | 振動子及び振動アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210910 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210910 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220823 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221223 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7202372 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |