JP7201714B2 - クリップカートリッジ、および医療機器 - Google Patents
クリップカートリッジ、および医療機器 Download PDFInfo
- Publication number
- JP7201714B2 JP7201714B2 JP2020569229A JP2020569229A JP7201714B2 JP 7201714 B2 JP7201714 B2 JP 7201714B2 JP 2020569229 A JP2020569229 A JP 2020569229A JP 2020569229 A JP2020569229 A JP 2020569229A JP 7201714 B2 JP7201714 B2 JP 7201714B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- clip
- connecting portion
- arm member
- tube
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003825 pressing Methods 0.000 claims description 178
- 230000007704 transition Effects 0.000 claims description 37
- 230000007246 mechanism Effects 0.000 claims description 26
- 230000004308 accommodation Effects 0.000 claims description 8
- 238000003780 insertion Methods 0.000 description 34
- 230000037431 insertion Effects 0.000 description 34
- 230000004048 modification Effects 0.000 description 26
- 238000012986 modification Methods 0.000 description 26
- 238000000034 method Methods 0.000 description 25
- 238000011282 treatment Methods 0.000 description 22
- 210000000078 claw Anatomy 0.000 description 18
- 238000010586 diagram Methods 0.000 description 15
- 238000012277 endoscopic treatment Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 239000000463 material Substances 0.000 description 9
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000007423 decrease Effects 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 239000010935 stainless steel Substances 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- WAIPAZQMEIHHTJ-UHFFFAOYSA-N [Cr].[Co] Chemical class [Cr].[Co] WAIPAZQMEIHHTJ-UHFFFAOYSA-N 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000011328 necessary treatment Methods 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000003466 welding Methods 0.000 description 2
- 229910001200 Ferrotitanium Inorganic materials 0.000 description 1
- 229910001069 Ti alloy Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images











































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/128—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
- A61B17/1222—Packages or dispensers therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
- A61B17/1227—Spring clips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/128—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips
- A61B17/1285—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Reproductive Health (AREA)
- Vascular Medicine (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
Description
以下、本発明の第1の実施形態に係るクリップカートリッジ、および医療機器の構成を、図1から図14を参照して説明する。
本実施形態に係る医療機器1は、図示しない内視鏡に形成されたチャンネルを通して患者の体内に挿入されて使用される。より詳しくは、本実施形態に係る医療機器1は、体内の標的組織を結紮するための結紮装置である。
図1は、本実施形態に係るクリップ10の斜視図である。図2は、本実施形態に係るクリップ10のアーム部材11の斜視図である。図3は、本実施形態に係るクリップ10の平面視における部分断面図である。
図1に示すように、本実施形態に係るクリップ10は、アーム部材11と、押さえ管31と、連結部(第1リンク)3とを備えて構成されている。
図1および図2に示すように、アーム部材11は、第一アーム12と、第二アーム13と、中間部14とを有している。第一アーム12および第二アーム13は、基端側から先端側に向けて延びるとともに互いに対向して配置されている。アーム部材11は、第一アーム12および第二アーム13が互いに交差して構成されている。図3に示すように、第一アーム12と第二アーム13とは、押さえ管31の軸線C1に対して線対称の位置に形成されてもよい。
本実施形態において、押さえ管31は、長手軸を有し、円筒状に形成されたパイプである。説明上の便宜を図るために、押さえ管31の長手軸が軸線C1である例を説明する。押さえ管31は、アーム部材11の中間部14が進入できる内径を有する。すなわち、押さえ管31には、アーム部材11の第一アーム12および第二アーム13が進入可能なルーメンが形成されている。押さえ管31に形成されたルーメンには、後述する連結部3の少なくとも一部も進入可能である。本実施形態において、押さえ管31は、外径が後述する挿入部65のシース66の内径よりも大きく形成されている。
本実施形態において、押さえ管31は、後述する操作ワイヤ62の先端に設けられたフック62aと連結部3の切欠部3gとが係合された状態で押さえ管31内に位置するとき、連結部3がフック62aに対して回動できない程度の内径を有して形成されている。より具体的に、図8から図10に示すように、上述の状態において、連結部3がフック62aに対して軸線C1方向に交差する方向に回動し、フック62aと連結部3との係合状態が解除されなければよく、連結部3がフック62aに対して全く回動しないという意味ではない。
アーム部材11は、例えば、コバルトクロム合金などで形成された板材を、第一アーム12および第二アーム13、中間部14、一対の第一被係止部16、17を平面状に展開した形状に打抜くことで、一体に形成される。
本実施形態において、連結部(第1リンク)3は、図1および図3に示すように、先端部3a、棒状部3b、フック部3c、切欠部3g、挿入孔3e、および基端部3fを有して形成されている。連結部3は、所定の強度を有する樹脂材料を用いて射出成形などの方法によって形成されている。
図3に示すように、連結部3は、クリップ10のアーム部材11と後述する操作ワイヤ62とを連結するために構成されている。連結部3の先端部3aは、アーム部材11を連結するためのフック部3cを支持するために構成され、その形状は特に制限されない。フック部3cは、先端部3aから連結部3が延びる長手軸の方向に直交する方向に突出して形成され、アーム部材11の中間部14に形成されたループに引っ掛けることにより、連結部3にアーム部材11を連結することができる。
本実施形態において、連結部3の先端部3aと基端部3fとを連結する棒状部3bは、その他の部分よりも強度が低く設定されている。このため、詳細は後述するが、クリップ10を留置する際、操作者による所定の力量で操作ワイヤ62を引き戻すことで、連結部3は、棒状部3bで破断する。このとき、連結部3の先端部3aがクリップ10とともに体内に留置され、基端部3fがフック62aに係合された状態で操作ワイヤ62によって体内から抜去される連結部(図12参照)。
本実施形態において図示しませんが、連結部3が押さえ管31の大径部31c内に位置した状態において、基端部3fの外周面と押さえ管31の大径部31cの内周面との間に一定のクリアランスがある。このため、操作者が操作ワイヤ62のフック62aを挿入孔3eに挿入すると、基端部3fの一対のレッグが連結部3の長手軸方向に対して径方向外側へ少し弾性変形することができる。しかしながら、この状態においても、フック62aが少し拡径した挿入孔3eを挿通することができない。言い換えれば、本実施形態において、連結部3が押さえ管31内に位置した状態において、操作者が操作ワイヤ62のフック62aを連結部3の切欠部3gに挿入することにより、クリップ10を操作ワイヤ62に装着することができない。
さらに、本実施形態における押さえ管31が上述の構成を有することにより、フック62aが切欠部3gに係合された状態で押さえ管31内に位置するとき、意図せずにフック62aが切欠部3gから脱落することを防止できる。
説明上の便宜のため、本実施形態において、連結部3、押さえ管31、および後述する操作部100は、共通の長手軸C1に沿って配置されている。
次に、本実施形態に係るクリップカートリッジ80の構成を説明する。クリップカートリッジ80は、クリップ10が製造されてから実際使用されるまでの過程において、輸送を容易にし、かつ、外部環境に汚染されることを防ぐために構成されている。本実施形態に係るクリップカートリッジ80は、図4に示すように、クリップ10と、クリップ10を内部に収容可能に構成されたハウジング40とを有して構成されている。図4は、出荷時のクリップカートリッジ80において、クリップ10がハウジング40の内部に収容された状態を示す部分断面図である。
本実施形態に係るハウジング40は、上述のような構成を有することで、クリップ10がハウジング40に収納された状態で、長手軸方向(軸線C1に沿う方向)に沿って進退動作できる。
本実施形態において、ハウジング40の長手軸C1に対して、一対のストッパ36および一対のL字溝391は、線対称で設けられてもよい。
続いて、図10を参照し、本実施形態に係るアプリケータ30の構成を説明する。図10に示すように、本実施形態に係るアプリケータ30は、挿入部65と、操作部100とを有して構成されている。
アプリケータ30の挿入部65は、シース66と、操作ワイヤ(ワイヤ)62とを備えている。操作ワイヤ62は、シース66内に進退可能に挿通されている。操作ワイヤ62は、操作者が基端側の操作部100を操作する(例えば、スライダ102を押し込む操作およびスライダ102を引き戻す操作)力量をクリップ10に伝達するために設けられている。
本実施形態において、シース66は、押さえ管31の小径部31dの内径と略同等の内径を有して形成されている(図8参照)。このため、シース66内において、クリップ10を操作ワイヤ62に装着することができない。また、フック62aが切欠部3gに係合された状態でシース66内に位置するとき、意図せずにフック62aが切欠部3gから脱落することを防止できる。
操作部100は、図10に示すように、操作部本体(ハンドル)101と、スライダ102とを有して構成されている。
操作部本体101は、シース66の基端部に取付けられている。操作部本体101は、軸線方向Yに延びる棒状に形成され、基端部に指掛け部101aが設けられている。操作部本体101には、軸線方向Yに延びるスリット101bが形成されている。
スライダ102は、操作部本体101のスリット101bに係合することで、操作部本体101に対するスライダ102の軸線方向Yの移動範囲が制限されている。
本実施形態において、操作部100は、各種公知の内視鏡用処置具の操作部の構成を適宜用いることができる。
以下、図4から図9を参照し、体内の標的組織を処置する前の準備として、本実施形態に係るクリップ10をアプリケータ30に装着する操作を説明する。
クリップ10は、図4に示すように、ハウジング40内に収容された状態で出荷される。この状態において、連結部3を含む押さえ管31は、ハウジング40のルーメン38内に位置している。
本実施形態において、ストッパ36がL字形状の溝391における横溝392に沿って移動することにより、連結部3と押さえ管31との相対位置を制御することができる。
このため、操作者がストッパ36を把持しなくても、ストッパ36が横溝392の先端に位置する状態を維持することができる。
その結果、図7に示すように、フック62aが連結部3の切欠部3gに係合され、連結部3とフック62aとが係合する連結部は、一対のストッパ36の間に位置し、押さえ管31の基端側の開口から突出する状態が維持されている。すなわち、連結部3は、突出形態が維持されている。
本実施形態において、ストッパ36がL字形状の溝391の縦溝393に沿ってハウジング40の径方向外側へ移動することにより、ストッパ36による連結部3の突出形態から収容形態への遷移に対する規制は解除できる。このため、本実施形態に係るL字形状の溝391における縦溝393は、連結部3の突出形態から収容形態への遷移に対する規制を解除するためのリリース機構と言える。
以上の操作により、本実施形態に係るクリップ10は、アプリケータ30に装着される。図9に示すように、クリップ10がアプリケータ30に装着された状態では、連結部3は、押さえ管31内に収容された収容形態にある。
以下、図10から図12を参照し、上述の構成を有する本実施形態に係る医療機器1を用いて、標的組織Tを結紮する手技について説明する。
クリップ10がアプリケータ30に装着された状態でハウジング40から取り出される際、クリップ10のアーム部材11の第一アーム12および第二アーム13は、自身の弾性復元力により、図10に示すように、互いに離間した開形態にある。この状態において、基端側の操作部100において、スライダ102がスリット101bにおける最も前進した位置にある。図示しないが、例えば、スライダ102がスリット101bにおける先端面に当接した位置にあってもよいし、スライダ102がスリット101bにおいて、先端面から離間した基端側の位置にあってもよい。
図13および図14に示すように、仮に連結部3およびフック62aの連結部が押さえ管31の外部に位置する場合を想定する。この場合、矢印Dが示す方向に沿って、連結部3が軸線C1方向に対して交差する方向に回動すると、フック62aが連結部3の切欠き部3gの側方から抜くことができる。言い換えれば、連結部3およびフック62aの連結部が押さえ管31の外部に位置する場合、連結部3とフック62aの係合状態が意図せず解除される可能性がある。その結果、クリップ10は、アプリケータ30から意図せず脱落する可能性がある。
このため、本実施形態に係る医療機器1によれば、クリップ10のアプリケータ30からの意図しない脱落を防ぐことができる。
本実施形態に係るクリップカートリッジ80によれば、アプリケータ30に対して、クリップ10のリローダブル化と、標的組織Tの掴み直し操作との両方を両立できる。
本実施形態に係る医療機器1によれば、ハウジング40は、各種公知の構成に、L字溝391およびストッパ36を設けることにより、簡単に構成できるため、製造も容易である。このため、低コストで医療機器1を製造できる。
以下、図15Aから図19Cを参照し、本発明の第1の実施形態の変形例に係る医療機器の構成を説明する。以下、上記の実施形態に係る医療機器1と同じ構成は、同じ符号を付けて、その説明を省略し、上記の実施形態と異なる点を中心に説明する。
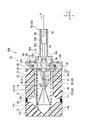
弾性部材35は、押さえ管31A内において、先端部が突部18、19、23、24に係止されるとともに基端部が係止部32に係止されて構成されている。弾性部材35の基端部と係止部32とは、溶着などにより固定してもよい。
弾性部材35内には、第一アーム12における突部18、19よりも基端側の部分、第二アーム13における突部23、24よりも基端側の部分、および中間部14が挿通可能である。
本変形例において、弾性部材35が押さえ管31A内に構成されることにより、連結部材3の一対のレッグは、押さえ管31A内で弾性部材35に干渉し得るため、径方向外側へ弾性変形することができない。言い換えれば、本変形例において、上述の第1の実施形態同様、押さえ管31A内において、操作ワイヤ62のフック62aが連結部3の挿入孔3eを通過し切欠部3gに係合されることはない。
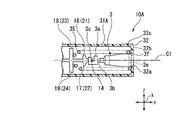
図15Aに示すように、本変形例において、アーム部材11Aの第一アーム12の基端部には、二つの第一被係止部16、17が設けられている。第一被係止部16、17は、押さえ管31Aの長手軸に平行な平面上を、第一アーム12の側面から直交方向Zに突出して設けられている。第一被係止部16、17は、互いに逆となる向きに突出している。
図15Aおよび図15Bに示すように、押さえ管31Aの基端部の内壁には、全周にわたり係止部32が突出して形成されている。図15Cに示すように、係止部32における軸線C1側の縁部32aは、押さえ管31Aと同軸の円形状に形成されている。図15Aおよび図15Bに示すように、係止部32の基端面(基端側端面)32bおよび先端面(先端側端面)32cは、軸線方向Yに直交している。係止部32には、第一アーム12における突部18、19よりも基端側の部分、第二アーム13における突部23、24よりも基端側の部分、および中間部14が挿通可能である。
図16Bに示すように、本変形例に係るアプリケータ30のシース66の先端側において、押さえ管31Aの基端部を支持する支持部66Aが形成されている。支持部66Aの内径は、押さえ管31Aの径方向における幅以上であってもよい。また、支持部66Aにおけるシース66の外径は、ハウジング40のルーメン38の内径よりも小さく形成されている。本変形例において、シース66がこのように構成することで、図16Bに示すように、ハウジング40のルーメン38に挿入し、ストッパ36と当接でき、かつ、押さえ管31Aを支持することができる。
本変形例において、説明上の便宜のため、シース66の支持部66Aにおける内径がシース66のその他の部分の内径よりも大きい例を説明するが、これに限定されない。例えば、シース66の先端部における内周面の一部を切り取ることにより、押さえ管31Aを支持する支持部を形成されてもよい。
本変形例において、シース66は、内径が押さえ管31A内に設けられた一対の弾性部材35の間の距離と略同等に形成されている。このため、本変形例において、シース66内において、操作ワイヤ62のフック62aが連結部3の挿入孔3eを通過し切欠部3gに係合することはできない。
以下、図15Aから図16Eを参照し、本変形例に係るクリップ10Aをアプリケータ30に装着する操作を説明する。
図15Aは、本変形例に係るクリップ10Aがハウジング40に収納される状態を示す図である。図15Aに示すように、一対のストッパ36は、ハウジング40の基端側に位置し、それぞれの先端面364が押さえ管31Aの係止部32の基端面32bに当接している。この状態において、押さえ管31Aにおける弾性部材35は、例えば、押圧されない状態であってもよい。また、連結部3は、押さえ管31A内に収容された収容形態である。
本変形例において、上述の第1の実施形態同様、連結部3の基端部3fの少なくとも一部が押さえ管31Aまたはシース66内に収容されておらず、外部に露出した(例えば、一対のストッパ56の間に位置する)状態のみ、操作者がフック62aを連結部3の切欠部3gに係合することができる。
次に、図17Aから図19Cを参照し、本変形例に係る医療機器1Aによる標的組織Tを結紮する手技を説明する。
クリップ10Aのアーム部材11Aの第一アーム12および第二アーム13の弾性復元力により、クリップ10Aがハウジング40のから取り出される際、アーム部材11Aの第一アーム12および第二アーム13は、互いに離間した開形態にある。
この状態において、アーム部材11Aの第一アーム12および第二アーム13の間における中間部14が圧縮され、第一アーム12の基端部および第二アーム13の基端部の間の距離が縮小する。より具体的に、図18Cに示すように、押さえ管31Aの長手軸の方向に沿ってクリップ10Aの基端側から見るとき、クリップ10Aの径方向における第一被係止部16、17と第二被係止部21、22との間の距離は、図15Cに示す状態よりも小さくなる。
操作者は、アーム部材11Aによって標的組織Tが所望の状態で把持されることを確認できたら、さらにスライダ102を基端側へ引き戻すことにより、アーム部材11Aの第一被係止部16、17および第二被係止部21、22が押さえ管31Aの係止部32を乗り越えて係止部32よりも基端側の位置まで移動させることができる。
本変形例に係るハウジング40は、上記の第1の実施形態に係るハウジング40と同様の作用を有する。本変形例に係る医療機器1Aによれば、上記の第1の実施形態に係る医療機器1と同様の作用を有する。
さらに、本変形例に係る医療機器1Aにおいて、押さえ管31Aの基端部の内壁には、全周にわたり係止部32が突出して形成されている。このため、図15Aに示すように、ストッパ36と押さえ管31Aとが当接する当接面の面積は、上記第1の実施形態に係る医療機器1よりも大きい。本変形例に係る医療機器1Aによれば、ストッパ36と押さえ管31Aとを当接させた状態でストッパ36を移動させる操作が簡便になる。
以下、図20から図23を参照し、本発明の第2の実施形態に係るクリップカートリッジを説明する。以下、上記の第1の実施形態と同じ構成は、同じ符号を付けて、その説明を省略し、上記の第1の実施形態と異なる点を中心に説明する。
図20は、本発明の第2の実施形態に係るハウジング50にクリップ10Aが収容された状態を示す平面視における部分断面図である。図21から図23は、本実施形態に係るクリップ10Aをアプリケータ30に装着する操作を示す図である。
図20に示すように、クリップ10Aをアプリケータ30に装着する前の状態において、ハウジング50において、アーム部材11Aが先端本体部51と基端本体部52との間に形成されたクリップ収納部57に配置され、押さえ管31が基端本体部52に形成されたルーメン38に配置されている。
本実施形態に係るクリップ10Aおよびアプリケータ30は、上記の第1の実施形態の変形例と同じ構成である。
本実施形態において、クリップ10Aをアプリケータ30に装着するとき、図20に示す状態において、操作者は、基端本体部52を把持した状態で、ハウジング50の長手軸方向(軸線C1に沿う方向)において、先端本体部51に基端側へ押圧する。この操作により、先端本体部51と基端本体部52との間の弾性部材53が圧縮され、先端本体部51が基端本体部52に向かって基端側へ移動される。
本実施形態において、上述の第1の実施形態およいb第1の実施形態の変形例同様、連結部3の基端部3fの少なくとも一部が押さえ管31Aまたはシース66内に収容されておらず、外部に露出した(例えば、一対のストッパ56の間に位置する)状態のみ、操作者がフック62aを連結部3の切欠部3gに係合することができる。
その後、上記の第1の実施形態の変形例同様に、操作者は、不図示の操作部を操作し、クリップ10Aおよびアプリケータ30をハウジング50の基端側の開口から抜去し、標的組織Tに対して結紮処置を行うことができる。
次に、図24から図27を参照し、本発明の第3の実施形態に係るクリップカートリッジ80Bを説明する。以下、上記の各実施形態と同じ構成は、同じ符号を付けて、その説明を省略し、上記の各実施形態と異なる点を中心に説明する。本実施形態において、クリップ10Aおよびアプリケータ30は、上述の各実施形態と同様の構成を有している。
図24は、本実施形態に係るクリップカートリッジ80Bにおいて、ハウジング60にクリップ10Aが収容された状態を示す平面視における部分断面図である。図25から図27は、本実施形態に係るクリップ10Aをアプリケータ30に装着する操作を示す図である。
本実施形態において、制御機構63は、一対のロッド63A、63Bがピン63Cで連結されて構成されている。一対のロッド63A、63Bは、ピン63Cを中心に回動できる。図24に示すように、一対のロッド63A、63Bは、バネなどの弾性部材によって、互いに離間する方向に付勢されている。言い換えれば、外力が作用しない状態において、図24に示すように、制御機構63の一対のロッド63A、63Bは、ハウジング60の径方向において、一定の距離をあけて離間している。
制御機構63が上述の構成を有することで、アーム部材11Aの第一アーム12の爪12aおよび第二アーム13の爪13aに直接接触せず、アーム部材11Aを係止することができる。
本実施形態に係るハウジング60は、その他の構成は、上記の第2の実施形態に係るハウジング50と同じである。
図24に示すように、クリップ10Aがハウジング60に収容された状態において、制御機構63のロッド63Aの突起631および63Bの突起632に、アーム部材11Aの第一アーム12の爪12aおよび第二アーム13の爪13aのそれぞれが当接している。アーム部材11Aは、第一アーム12および第二アーム13が離間している開き形態にある。クリップ10Aの連結部3は、本体部61に形成されたルーメン38内に位置する押さえ管31内に配される。また、一対のストッパ56は、ルーメン38内に突出した位置に配されることにより、押さえ管31の基端面に当接している。
本実施形態において、上述の各実施形態および変形例同様、連結部3の基端部3fの少なくとも一部が押さえ管31Aまたはシース66内に収容されておらず、外部に露出した(例えば、一対のストッパ56の間に位置する)状態のみ、操作者がフック62aを連結部3の切欠部3gに係合することができる。
その後、操作者は、不図示の操作部を操作し、アプリケータ30とともにアプリケータ30に装着されたクリップ10Aを抜去する。これで、本実施形態に係るクリップ10Aをアプリケータ30に装着する操作が終了する。
以下、図28Aから図31を参照し、本発明の第4の実施形態に係るクリップカートリッジ80Cを説明する。以下、上記の各実施形態と同じ構成は、同じ符号を付けて、その説明を省略し、上記の各実施形態と異なる点を中心に説明する。
図28Aは、本発明の第4の実施形態に係るハウジング70にクリップユニット10Bが収容された状態を示す平面視における部分断面図である。図28Bは、本実施形態に係るクリップカートリッジ80Cにクリップ10Bが収容された状態で、基端側からクリップ10Bを見る図である。図29から図31は、本実施形態に係るクリップユニット10Bをアプリケータ30に装着する操作を示す図である。
図28Aおよび図28Bに示すように、本実施形態に係るクリップ10Bがハウジング70に収容された状態において、第一被係止部16、17および第二被係止部21、22が押さえ管31の基端面に当接することにより、連結部3が押さえ管31の基端側の開口から突出した突出形態が維持される。操作者は、不図示の操作部を操作し、図29に示すように、シース66を先端側へ移動させて、シース66の先端部に設けられた支持部66Aをストッパ56に当接させる。この状態において、上述の各実施形態同様、連結部3の基端部3fは、支持部66A内の空間において、一対のストッパ56の間に位置する。その後、操作者が不図示の操作部のスライダを押し込むことにより、操作ワイヤ62の先端に設けられたフック62aを、押さえ管31の基端側の開口から突出した連結部3の切欠部3gに係合することができる。
操作者は、不図示の操作部を操作し、アプリケータ30とともにアプリケータ30に装着されたクリップ10Bをハウジング70から抜去する。これで、本実施形態に係るクリップ10Bをアプリケータ30に装着する操作が終了する。
本実施形態に係るクリップカートリッジ80Cによれば、クリップ10Bのアーム部材11Aに設けられた第一被係止部16、17および第二被係止部21、22によって、クリップ10Bがハウジング70に収容されたとき、連結部3が押さえ管31の基端側の開口から突出する突出形態が維持される。このため、操作者が連結部3を押さえ管31の基端側の開口から突出させる操作が不要となり、クリップ10の装着操作がより簡便になる。
クリップ10Cにおいて、アーム20のみが押さえ管31に対して移動することができるため、アーム20は、アーム部材における移動部と見なすことができる。図32に示すクリップ10Cの構成を、上述の各実施形態および変形例に適用することにより、同様の効果を有する。
また、この医療機器において、好適にクリップユニットをアプリケータに装着し、医療機器を構成する装着方法を提供することもできる。
3 連結部(第1リンク)
10,10A,10B,10C クリップユニット(クリップ)
11,11A,11B アーム部材
12 第一アーム
13 第二アーム
14 中央部
16,17 第一被係止部
18,19,23,24 突部
21,22 第二被係止部
25,26 突起
30 アプリケータ
31,31A 押さえ管
36,56 ストッパ
37,57 クリップ収納部
40,50,60,70 ハウジング
80、80A、80B、80C クリップカートリッジ
54 縦溝
55,361 ピン
62 操作ワイヤ
62a フック(第2リンク)
65 挿入部
66 シース
100 操作部
101 操作部本体(ハンドル)
102 スライダ
392 横溝(第一の溝)
393 縦溝(第二の溝)
C1 軸線
T 標的組織
Claims (6)
- 長手軸に沿って延びる押さえ管と、前記押さえ管に挿入され、第一アームおよび第二アームを有するアーム部材と、前記アーム部材に設けられ、前記押さえ管から突出した状態である突出形態と前記押さえ管に収容された収容形態とを遷移できる連結部と、を有するクリップユニットと、
前記クリップユニットを収容できるハウジングと、
を備え、
前記アーム部材は、前記第一アームと前記第二アームとの間の距離が大きくなる方向へ付勢する付勢力を有し、
前記連結部は、前記アーム部材の前記付勢力によって前記突出形態から前記収容形態へ遷移するよう構成され、
前記ハウジングは、
前記連結部の前記突出形態から前記収容形態への遷移を規制するストッパと、
前記ストッパによる前記連結部の前記突出形態から前記収容形態への前記遷移に対する規制を解除できるリリース機構と、を有し、
前記ストッパは、前記アーム部材または前記押さえ管と接触することにより、前記クリップユニットの前記遷移を規制できる、
クリップカートリッジ。 - 前記連結部は、前記リリース機構が前記ストッパによる前記規制を解除するとき、前記付勢力によって前記突出形態から前記収容形態へ遷移する、
請求項1に記載のクリップカートリッジ。 - 前記アーム部材は、前記アーム部材が閉じる状態で前記押さえ管に設けられた被係合部と係合することにより、前記アーム部材の前記押さえ管に対する移動を規制する係合部を有し、
前記係合部は、前記連結部が前記突出形態から前記収容形態へ遷移するとき、前記被係合部から離間する方向へ移動する、
請求項1に記載のクリップカートリッジ。 - 前記ストッパは、前記アーム部材または前記押さえ管と当接することにより、前記連結部を前記収容形態から前記突出形態へ遷移させる,請求項1に記載のクリップカートリッジ。
- 前記リリース機構は、前記押さえ管の前記長手軸に交差する方向へ前記ストッパを移動させることにより、前記ストッパによる前記規制を解除できる、請求項1に記載のクリップカートリッジ。
- 請求項1に記載の前記クリップカートリッジと、
前記連結部と係合可能な操作ワイヤを備えるアプリケータと、
を備え、
前記連結部は、前記連結部と前記操作ワイヤとが係合される係合形態と、前記連結部と前記操作ワイヤとの係合形態が解除される解除形態とを有し、
前記連結部は、前記突出形態において、前記解除形態から前記係合形態へ遷移することが可能であり、
前記連結部は、前記収容形態において、前記解除形態と前記係合形態とを遷移することが前記押さえ管の内壁によって規制される、
医療機器。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/003134 WO2020157855A1 (ja) | 2019-01-30 | 2019-01-30 | クリップカートリッジ、医療機器、および医療機器の装着方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2020157855A1 JPWO2020157855A1 (ja) | 2021-11-25 |
| JP7201714B2 true JP7201714B2 (ja) | 2023-01-10 |
Family
ID=71841448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020569229A Active JP7201714B2 (ja) | 2019-01-30 | 2019-01-30 | クリップカートリッジ、および医療機器 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210353296A1 (ja) |
| EP (1) | EP3919006A4 (ja) |
| JP (1) | JP7201714B2 (ja) |
| CN (1) | CN113365565B (ja) |
| WO (1) | WO2020157855A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023028250A1 (en) | 2021-08-25 | 2023-03-02 | GastroLogic LLC | Endoscopic clip apparatus and methods |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006062019A1 (ja) | 2004-12-07 | 2006-06-15 | Olympus Corporation | 内視鏡用処置具システム、および、処置具が内包されたカートリッジ |
| JP2007507307A (ja) | 2003-09-30 | 2007-03-29 | ボストン サイエンティフィック リミテッド | 経内視鏡的に張力部材を解除するクリップ |
| JP2007209775A (ja) | 2000-10-16 | 2007-08-23 | Olympus Corp | クリップケース |
| JP2008526376A (ja) | 2005-01-11 | 2008-07-24 | ボストン サイエンティフィック サイムド, インコーポレイテッド | 止血用マルチクリップ展開装置 |
| JP2009268637A (ja) | 2008-05-02 | 2009-11-19 | Fujifilm Corp | ダミークリップ、連結クリップパッケージ、クリップ装填方法 |
| JP2010178897A (ja) | 2009-02-05 | 2010-08-19 | Fujifilm Corp | クリップ処置具 |
| JP2013085859A (ja) | 2011-10-21 | 2013-05-13 | Sumitomo Bakelite Co Ltd | 医療用器具 |
| JP2017148182A (ja) | 2016-02-23 | 2017-08-31 | 住友ベークライト株式会社 | クリップカートリッジ |
| WO2018011846A1 (ja) | 2016-07-11 | 2018-01-18 | オリンパス株式会社 | 内視鏡処置具 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4955328B2 (ja) * | 2005-09-29 | 2012-06-20 | テルモ株式会社 | 生体内組織閉鎖装置 |
| JP5246393B2 (ja) * | 2007-11-28 | 2013-07-24 | 住友ベークライト株式会社 | 体外回収部品離脱用カートリッジ及び両用カートリッジ |
| JP2010069292A (ja) * | 2008-08-21 | 2010-04-02 | Fujifilm Corp | クリップパッケージ |
| JP4813531B2 (ja) | 2008-09-16 | 2011-11-09 | オリンパス株式会社 | 生体組織の結紮装置 |
| JP2011045535A (ja) * | 2009-08-27 | 2011-03-10 | Fujifilm Corp | クリップパッケージ |
| JP5588711B2 (ja) * | 2010-03-30 | 2014-09-10 | 富士フイルム株式会社 | 結紮装置 |
| JP5676772B2 (ja) * | 2010-10-11 | 2015-02-25 | クック メディカル テクノロジーズ エルエルシーCook Medical Technologies Llc | 取り外し可能かつ回動可能なジョーを備える医療装置 |
| JP5750620B2 (ja) * | 2013-05-07 | 2015-07-22 | オリンパス株式会社 | 内視鏡処置具 |
| KR101601911B1 (ko) * | 2014-11-13 | 2016-03-09 | 김병철 | 내시경용 처치구 장치 |
| CN114176588B (zh) * | 2015-01-30 | 2024-09-10 | 施曼信医疗Asd公司 | 可释放导管座保持器 |
| US10238495B2 (en) * | 2015-10-09 | 2019-03-26 | Evalve, Inc. | Delivery catheter handle and methods of use |
| US10856883B2 (en) * | 2015-11-30 | 2020-12-08 | Kaneka Corporation | Medical clip cartridge |
| JP6784516B2 (ja) * | 2016-06-07 | 2020-11-11 | 野村ユニソン株式会社 | クリップユニット用カートリッジ及びクリップユニット係合方法 |
| CN206453852U (zh) * | 2016-07-12 | 2017-09-01 | 成都意町工业产品设计有限公司 | 一种止血夹包装盒 |
| KR101793631B1 (ko) * | 2016-12-23 | 2017-11-03 | (주) 태웅메디칼 | 내시경용 처치구 장치 |
-
2019
- 2019-01-30 EP EP19913755.5A patent/EP3919006A4/en active Pending
- 2019-01-30 CN CN201980090560.1A patent/CN113365565B/zh active Active
- 2019-01-30 JP JP2020569229A patent/JP7201714B2/ja active Active
- 2019-01-30 WO PCT/JP2019/003134 patent/WO2020157855A1/ja unknown
-
2021
- 2021-07-27 US US17/386,207 patent/US20210353296A1/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007209775A (ja) | 2000-10-16 | 2007-08-23 | Olympus Corp | クリップケース |
| JP2007507307A (ja) | 2003-09-30 | 2007-03-29 | ボストン サイエンティフィック リミテッド | 経内視鏡的に張力部材を解除するクリップ |
| WO2006062019A1 (ja) | 2004-12-07 | 2006-06-15 | Olympus Corporation | 内視鏡用処置具システム、および、処置具が内包されたカートリッジ |
| JP2008526376A (ja) | 2005-01-11 | 2008-07-24 | ボストン サイエンティフィック サイムド, インコーポレイテッド | 止血用マルチクリップ展開装置 |
| JP2009268637A (ja) | 2008-05-02 | 2009-11-19 | Fujifilm Corp | ダミークリップ、連結クリップパッケージ、クリップ装填方法 |
| JP2010178897A (ja) | 2009-02-05 | 2010-08-19 | Fujifilm Corp | クリップ処置具 |
| JP2013085859A (ja) | 2011-10-21 | 2013-05-13 | Sumitomo Bakelite Co Ltd | 医療用器具 |
| JP2017148182A (ja) | 2016-02-23 | 2017-08-31 | 住友ベークライト株式会社 | クリップカートリッジ |
| WO2018011846A1 (ja) | 2016-07-11 | 2018-01-18 | オリンパス株式会社 | 内視鏡処置具 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3919006A1 (en) | 2021-12-08 |
| US20210353296A1 (en) | 2021-11-18 |
| CN113365565A (zh) | 2021-09-07 |
| EP3919006A4 (en) | 2022-09-07 |
| CN113365565B (zh) | 2024-06-11 |
| WO2020157855A1 (ja) | 2020-08-06 |
| JPWO2020157855A1 (ja) | 2021-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5750620B2 (ja) | 内視鏡処置具 | |
| JP5750624B2 (ja) | 内視鏡処置具 | |
| JP7209012B2 (ja) | クリップユニットおよび内視鏡クリップ | |
| US12089852B2 (en) | Endoscope clip and operation method for clip arm | |
| US11020126B2 (en) | Endoscopic surgical device | |
| US20210290240A1 (en) | Medical device and method of releasing clip unit | |
| CN110811746A (zh) | 旋转旋钮组件和包括该旋转旋钮组件的外科器械 | |
| JP2014531248A (ja) | 自動外科用結紮クリップアプライヤ | |
| WO2014181675A1 (ja) | クリップユニット | |
| JP7184548B2 (ja) | 外科用縫合糸通し装置のための縫合糸マガジン | |
| US20210236134A1 (en) | Endoscope clip | |
| JP7201714B2 (ja) | クリップカートリッジ、および医療機器 | |
| US20210298761A1 (en) | Applicator, medical device, and loading method of clip | |
| US20210298759A1 (en) | Applicator, medical apparatus, and operation method of medical apparatus | |
| CN217066505U (zh) | 医疗设备 | |
| US20140316440A1 (en) | Multiple clip endoscopic tissue clipping system and device | |
| WO2021156930A1 (ja) | アプリケータおよび結紮装置 | |
| US20230035426A1 (en) | Clip device and connection method of clip unit and actuator | |
| WO2021157057A1 (ja) | カートリッジおよび連結部材脱離方法 | |
| WO2024003727A1 (en) | Suture device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210721 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210721 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220809 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221222 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7201714 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |