JP7184191B2 - 推定装置、推定方法、およびプログラム - Google Patents
推定装置、推定方法、およびプログラム Download PDFInfo
- Publication number
- JP7184191B2 JP7184191B2 JP2021527620A JP2021527620A JP7184191B2 JP 7184191 B2 JP7184191 B2 JP 7184191B2 JP 2021527620 A JP2021527620 A JP 2021527620A JP 2021527620 A JP2021527620 A JP 2021527620A JP 7184191 B2 JP7184191 B2 JP 7184191B2
- Authority
- JP
- Japan
- Prior art keywords
- bogie frame
- displacement
- derived
- distribution
- external force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 91
- 238000006073 displacement reaction Methods 0.000 claims description 301
- 239000011159 matrix material Substances 0.000 claims description 294
- 238000009795 derivation Methods 0.000 claims description 154
- 230000001133 acceleration Effects 0.000 claims description 81
- 238000007689 inspection Methods 0.000 claims description 46
- 238000012545 processing Methods 0.000 claims description 42
- 238000005259 measurement Methods 0.000 claims description 35
- 238000004458 analytical method Methods 0.000 claims description 32
- 238000012937 correction Methods 0.000 claims description 25
- 230000014509 gene expression Effects 0.000 claims description 21
- 238000000354 decomposition reaction Methods 0.000 claims description 18
- 230000009466 transformation Effects 0.000 claims description 15
- 239000000203 mixture Substances 0.000 claims description 2
- 238000000611 regression analysis Methods 0.000 claims description 2
- 239000013598 vector Substances 0.000 description 150
- 238000010586 diagram Methods 0.000 description 60
- 230000008878 coupling Effects 0.000 description 37
- 238000010168 coupling process Methods 0.000 description 37
- 238000005859 coupling reaction Methods 0.000 description 37
- 230000006870 function Effects 0.000 description 26
- 230000008569 process Effects 0.000 description 18
- 238000005070 sampling Methods 0.000 description 15
- 238000013016 damping Methods 0.000 description 13
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 11
- 230000008859 change Effects 0.000 description 11
- 238000004891 communication Methods 0.000 description 11
- 238000004364 calculation method Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 4
- 238000013519 translation Methods 0.000 description 4
- 230000014616 translation Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 3
- 238000007906 compression Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61F—RAIL VEHICLE SUSPENSIONS, e.g. UNDERFRAMES, BOGIES OR ARRANGEMENTS OF WHEEL AXLES; RAIL VEHICLES FOR USE ON TRACKS OF DIFFERENT WIDTH; PREVENTING DERAILING OF RAIL VEHICLES; WHEEL GUARDS, OBSTRUCTION REMOVERS OR THE LIKE FOR RAIL VEHICLES
- B61F5/00—Constructional details of bogies; Connections between bogies and vehicle underframes; Arrangements or devices for adjusting or allowing self-adjustment of wheel axles or bogies when rounding curves
- B61F5/02—Arrangements permitting limited transverse relative movements between vehicle underframe or bolster and bogie; Connections between underframes and bogies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61F—RAIL VEHICLE SUSPENSIONS, e.g. UNDERFRAMES, BOGIES OR ARRANGEMENTS OF WHEEL AXLES; RAIL VEHICLES FOR USE ON TRACKS OF DIFFERENT WIDTH; PREVENTING DERAILING OF RAIL VEHICLES; WHEEL GUARDS, OBSTRUCTION REMOVERS OR THE LIKE FOR RAIL VEHICLES
- B61F5/00—Constructional details of bogies; Connections between bogies and vehicle underframes; Arrangements or devices for adjusting or allowing self-adjustment of wheel axles or bogies when rounding curves
- B61F5/26—Mounting or securing axle-boxes in vehicle or bogie underframes
- B61F5/30—Axle-boxes mounted for movement under spring control in vehicle or bogie underframes
- B61F5/32—Guides, e.g. plates, for axle-boxes
- B61F5/325—The guiding device including swinging arms or the like to ensure the parallelism of the axles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0081—On-board diagnosis or maintenance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/08—Railway vehicles
- G01M17/10—Suspensions, axles or wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L2205/00—Communication or navigation systems for railway traffic
- B61L2205/04—Satellite based navigation systems, e.g. global positioning system [GPS]
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Testing Of Devices, Machine Parts, Or Other Structures Thereof (AREA)
- Vehicle Body Suspensions (AREA)
Description
特許文献1では、台車の負荷箇所に荷重が与えられた際の車体の加速度検出箇所における単位荷重当たりの加速度の周波数特性(周波数第一特性)と、前記負荷箇所に荷重が与えられた際の台車の検査箇所における単位荷重当たりの応力の周波数特性(周波数第二特性)と、を記憶する。そして、鉄道車両の走行中に前記加速度検出箇所において検出した加速度の周波数特性(周波数第三特性)と、前記周波数第一特性と、に基づいて、走行中に台車に与えられた荷重を算出する。このようにして算出した走行中に台車に与えられた荷重と、前記周波数第二特性と、に基づいて、前記台車の検査箇所における車両の走行中の応力を算出する。そして、時間経過に応じた前記車両の走行中の応力の解析結果に基づいて、前記検査箇所の監視を行う。
(第1の実施形態)
まず、第1の実施形態を説明する。
<鉄道車両の概略構成>
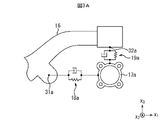
まず、本実施形態で例示する鉄道車両について説明する。図1は、鉄道車両の概略の一例を示す図である。図2は、台車枠およびその周辺の部品の構成の一例を示す図である。尚、図1、図2において、鉄道車両は、x1軸の正の方向に進むものとする(x1軸は、鉄道車両の走行方向に沿う軸である)。また、x3軸は、軌道20(地面)に対し垂直方向(鉄道車両の高さ方向)であるものとする。x2軸は、鉄道車両の走行方向に対して垂直な水平方向(鉄道車両の走行方向と高さ方向との双方に垂直な方向)であるものとする。また、鉄道車両は、営業車両であるものとする。尚、各図において、○の中に●が付されているものは、紙面の奥側から手前側に向かう方向を示す。
図2において、輪軸13a、13bのx2軸に沿う方向の両側には、軸箱17a、17bが配置される。軸箱17a、17bは、モノリンク18a、18bを介して台車枠16と接続されている。また、軸箱17a、17bは、軸バネ19a、19bを介して台車枠16と接続されている。尚、鉄道車両は、図1、図2に示す構成要素以外の構成要素を有する。表記および説明の都合上、図1、図2では、当該構成要素の図示を省略する。例えば、図2において、鉄道車両が軸ダンパを有するものである場合、軸箱17a、17bは、軸ダンパを介して台車枠16と接続されている場合もある。
以下の説明では、台車枠16と、軸箱17a、17bとを連結する部品を、必要に応じて結合要素と総称する。
<<台車枠16の運動方程式>>
台車枠16の振動を表す運動方程式は、以下の(1)式で表される。

{u}(∈R3l)は、台車枠16の変位ベクトルである。{f}(∈R3l)は、台車枠16の外力ベクトルである。
(1)式の右辺の外力ベクトル{f}は、結合要素に作用する外力を導出することによって与えられる。
そこで、図3Aおよび図3Bを参照しながら、結合要素に作用する外力の導出方法の一例について説明する。図3Aおよび図3Bは、結合要素の一例をモデル化して示す図である。図3Aは、台車枠16と軸箱17aとに接続される結合要素をモデル化した図を示す。図3Bは、台車枠16と軸箱17bとに接続される結合要素をモデル化した図を示す。台車枠16とその他の軸箱(軸箱17b等)とに接続される結合要素をモデル化した図も、図3Aおよび図3Bと同じようにして表されるので、ここでは、その詳細な説明を省略する。台車枠16と結合要素との接続箇所は、台車枠16と結合要素とが相互に接触する領域(の全体)としても、台車枠16と結合要素とが接触する領域の代表点(例えば、重心の位置)としてもよい。図3Aおよび図3Bに示す例では、説明を簡単にするため、台車枠16と結合要素との接続箇所が点であるものとする。以下の説明では、台車枠16と結合要素との接続箇所を、必要に応じて、着力点と称する。図3Aおよび図3Bに示す例では、バネおよびダンパを並列に接続したモデルで、モノリンク18aおよび軸バネ19aを表す。モデル化したモノリンク18aと台車枠16とは着力点31aで接続される。モデル化した軸バネ19aと台車枠16とは着力点32aで接続される。また、軸箱17bについても同様に、モデル化したモノリンク18bと台車枠16とは着力点31bで接続され、モデル化した軸バネ19bと台車枠16とは着力点32bで接続される。

(1)式の外力ベクトル{f}の(台車枠16の)着力点31a、31b、32a、32bに作用する外力の成分には、前述の方法で導出した値を与え、その他の成分には、0(ゼロ)を与えて、台車枠16の変位ベクトル{u}を導出することにより、台車枠16の変位分布を導出することができる。本実施形態では、計算時間を短縮するため、(1)式で表される物理座標(現実空間の位置を表す座標)系の運動方程式を、モード座標系の運動方程式で表現し、モード座標系の運動方程式を解く場合を例に挙げて説明する。以下に、モード座標系の運動方程式を解く手法の一例を説明する。


モード座標系における台車枠16の質量行列[Mξ]、粘性行列[Cξ]、剛性行列[Kξ]は、対角行列である。従って、各固有振動モードは、相互に独立したものとして扱うことができる。よって、計算時間を短くすることができる。
物理座標系における台車枠16の変位ベクトル{u}は、以下の(9)式のように、モード座標系における変位ベクトル{ξ}(∈Rn)に変換される。物理座標系における台車枠16の外力ベクトル{f}は、以下の(10)式のように、モード座標系における外力ベクトル{fξ}(∈Rn)に変換される。


(3)式~(5)式を(11)式に代入すると、[φ]T[φ]は単位行列であるので、以下の(12)式が得られる。

ここで、前述の方法で導出した(1)式における外力ベクトル{f}を、モード座標系における外力ベクトル{fξ}として与えられる必要がある。
そこで、(10)式を変形して得られる(13)式を用いる。

そのために、まず、モード行列[φ]を、固有値解析により導出する。モード行列[φ]と、台車枠16の質量行列[M]、粘性行列[C]、および剛性行列[K]と、を用いて、(3)式~(5)式により、モード座標系における台車枠16の質量行列[Mξ]、粘性行列[Cξ]、および剛性行列[Kξ]を導出する。
まず、状態変数Ξ(∈R2n)を以下の(14)式のように定義する。また、(12)式を以下の(15)式の状態方程式で記述する。




尚、(12)式は、常微分方程式であり、(12)式を解く手法は、状態変数モデルを用いる手法に限定されない。(12)式を解く手法として、常微分方程式を解くための公知の手法を採用することができる。

台車枠16の変位分布が得られれば、メッシュの各要素eの内部における歪みテンソルの各成分εe,11、εe,12、εe,13、εe,21、εe,22、εe,23、εe,31、εe,32、εe,33は、以下の(20a)式~(20f)式で表される。

応力と歪みとの関係は、以下の(21)式で表される。尚、(21)式は、弾性体の構成則と呼ばれる。

λ、μは、それぞれ、ラメ定数、剛性率である。ラメ定数λ、剛性率μは、それぞれ、以下の(22)式、(23)式で表される。

以上のようにして、台車枠16の応力分布(各メッシュにおける応力)が得られる。
図1に示すように、本実施形態では、推定装置400は、鉄道車両の車体11内に配置される。ただし、推定装置400を車体11内に配置せず、鉄道車両の外部に配置してもよい。このようにする場合、鉄道車両で測定されるデータは、例えば、無線通信により、鉄道車両から推定装置400に送信されるようにする。
データ取得部401は、一定周期のサンプリング時刻が到来する度に、加速度センサ21a、21bで測定された加速度を示すデータと、鉄道車両の走行位置を示すデータと、を含むデータを取得する。鉄道車両の走行位置を示すデータを取得する方法は、特に限定されない。鉄道車両の走行位置を示すデータは、例えば、鉄道車両に配置されたGPS(Global Positioning System)を用いることにより得ることができる。また、鉄道車両の走行速度と、測定の開始時からの経過時間とに基づいて、各時刻における鉄道車両の、測定の開始時点からの移動距離を導出し、当該移動距離と、当該鉄道車両が走行する軌道20の配置とに基づいて、鉄道車両の各時刻における走行位置を導出してもよい。このようにする場合、測定の開始時点における鉄道車両の位置を示すデータは、測定開始前に推定装置400に記憶される。
固有値解析部402は、(1)式の運動方程式に対する固有値解析を行うことにより、固有振動数ωおよび固有ベクトル{φ}を導出し、固有ベクトル{φ}で構成されるモード行列[φ]を導出する。尚、有限要素法による運動方程式の定式化に基づいて、台車枠16の質量行列[M]、粘性行列[C]、および剛性行列[K]が導出される。
質量導出部403は、モード行列[φ]と、台車枠16の質量行列[M]と、を用いて、(3)式により、モード座標系における台車枠16の質量行列[Mξ]を導出する。以下の説明では、モード座標系における台車枠16の質量行列を、必要に応じて、モード質量行列と称する。
粘性導出部404は、モード行列[φ]と、台車枠16の粘性行列[C]と、を用いて、(4)式により、モード座標系における台車枠16の粘性行列[Cξ]を導出する。以下の説明では、モード座標系における台車枠16の粘性行列を、必要に応じて、モード粘性行列と称する。
剛性導出部405は、モード行列[φ]と、台車枠16の剛性行列[K]と、を用いて、(5)式により、モード座標系における台車枠16の剛性行列[Kξ]を導出する。以下の説明では、モード座標系における台車枠16の剛性行列を、必要に応じて、モード剛性行列と称する。
外力導出部406は、加速度センサ21a、21bで測定された加速度のデータに基づいて、モノリンク18a、18bの変位ベクトル{u0}および速度ベクトル{u0・}および軸バネ19a、19bの変位ベクトル{u0}および速度ベクトル{u0・}をそれぞれ導出する。外力導出部406は、モノリンク18a、18bの粘性減衰係数および軸バネ19a、19bの粘性減衰係数から、モノリンク18a、18bの粘性行列[Cbc]および軸バネ19a、19bの粘性行列[Cbc]をそれぞれ導出する。また、外力導出部406は、モノリンク18a、18bの剛性および軸バネ19a、19bの剛性から、モノリンク18a、18bの剛性行列[Kbc]および軸バネ19a、19bの剛性行列[Kbc]をそれぞれ導出する。
外力導出部406は、台車枠16の外力ベクトル{f}の成分の内、着力点31a、31b、32a、32bに作用する外力の成分には、このようにして導出した値を与え、その他の成分には、0(ゼロ)を与えることにより、台車枠16の外力ベクトル{f}を、台車枠16の外力分布として導出する。外力導出部406は、このようにして導出された台車枠16の外力ベクトル{f}と、モード行列[φ]と、を用いて、(13)式により、モード座標系における台車枠16の外力ベクトル{fξ}を導出する。以下の説明では、モード座標系における台車枠16の外力ベクトルを、必要に応じて、モード外力ベクトルと称する。本実施形態では、例えば、台車枠16の外力ベクトル{f}が、台車枠に作用する外力の分布の一例である。また、モード外力ベクトル{fξ}が、モード座標系における台車枠に作用する外力の分布の一例である。
状態導出部407は、外力導出部406により導出された台車枠16の外力ベクトル{f}に基づいて、台車枠16の状態を表す情報を導出する。本実施形態では、状態導出部407は、台車枠16の状態を表す情報として、台車枠16の変位の分布と台車枠16の応力の分布とを含む情報を導出する。本実施形態では、状態導出部407は、変位分布導出部407aと、応力分布導出部407bとを有する。
変位分布導出部407aは、モード質量行列[Mξ]、モード粘性行列[Cξ]、モード剛性行列[Kξ]、およびモード外力ベクトル{fξ}を用いて、(12)式により、モード座標系における台車枠16の変位ベクトル{ξ}を、モード座標系における台車枠16の変位分布として導出する。前述したように本実施形態では、変位分布導出部407aは、(14)式~(18)式に示す状態変数モデルを用いて、モード座標系における台車枠16の変位ベクトル{ξ}を導出する。以下の説明では、モード座標系における台車枠16の変位ベクトルを、必要に応じて、モード変位ベクトルと称する。本実施形態では、例えば、モード変位ベクトル{ξ}が、モード座標系における台車枠の変位の分布の一例である。
変位分布導出部407aは、モード変位ベクトル{ξ}と、モード行列[φ]と、を用いて、(19)式により、物理座標系における台車枠16の変位ベクトル{u}を、物理座標系における台車枠16の変位分布として導出する。以下の説明では、物理座標系における台車枠16の変位ベクトルを、必要に応じて、実変位ベクトルと称する。本実施形態では、例えば、実変位ベクトル{u}が、物理座標系における台車枠の変位の分布の一例である。
応力分布導出部407bは、実変位ベクトル{u}を用いて、(20a)式~(20f)式により、メッシュの各要素eの内部における歪みテンソルを、台車枠16の歪み分布として導出する。応力分布導出部407bは、メッシュの各要素eの内部における歪みテンソルと、台車枠16のヤング率Eおよびポアソン比νとを用いて、(21)式~(23)式により、メッシュの各要素eの内部における応力テンソルを、台車枠16の応力分布として導出する。
応力-位置関係導出部408は、台車枠16の応力分布と、鉄道車両の走行位置と、を相互に関連付けて記憶する。以下の説明では、このようにして相互に関連付けられた、台車枠16の応力分布および鉄道車両の走行位置を、必要に応じて、応力-位置関係情報と称する。以上のようにして各サンプリング時刻における応力-位置関係情報が得られる。
判定部409は、応力-位置関係情報(応力の時間変化)に基づく指標値が、所定の条件を満たすか否かを判定する。本実施形態では、判定部409は、応力-位置関係情報(応力の時間変化)に基づいて定められる平均応力および変動応力を、JIS規格E4207の応力限界図にプロットする。そして、判定部409は、応力限界図にプロットした点が、応力限界図の応力許容域内にあるか否かを判定する。例えば、判定部409は、或る計測区間の台車枠16の応力と鉄道車両の走行位置(時間)との関係を示すグラフにおいて、応力の極大値を示す領域周辺に変動区間を設定する。そして、判定部409は、当該変動区間内での応力の平均値を平均応力とし、当該変動区間内での応力の変動幅(振幅)を変動応力とする。
図5において、σBは、台車枠16の材料の引張強さである。σ0は、台車枠16の材料の降伏に対する許容応力である。σw1は、台車枠16の材料の疲れ許容応力である。σw2は、台車枠16の溶接止端部を仕上げない場合の疲れ許容応力である。σw3は、台車枠16の溶接止端部を仕上げる場合の疲れ許容応力である。
点検箇所特定情報導出部410は、応力-位置関係情報に基づいて定められる平均応力および変動応力を応力限界図にプロットした点が、応力限界図の応力許容域内にない場合、当該プロットが得られた台車枠16の位置と、当該プロットした点が応力限界図の応力許容域内にないときの鉄道車両の走行位置と、を導出する。点検箇所特定情報導出部410は、当該導出を、応力-位置関係情報から設定される複数の変動区間のそれぞれにおいて行う。これにより、鉄道車両がどの位置を走行しているときに、台車枠16のどの位置で、応力-位置関係情報に基づいて定められる平均応力および変動応力を応力限界図にプロットした点が、応力限界図の応力許容域内にないのかを特定することができる。以下の説明では、応力限界図の応力許容域内にないプロットが得られた台車枠16の位置と、当該応力-位置関係情報に示される鉄道車両の走行位置とを示す情報を、必要に応じて、点検箇所特定情報と称する。尚、点検箇所特定情報は、応力限界図の応力許容域内にないプロットが得られた台車枠16の位置と、当該応力-位置関係情報に示される鉄道車両の走行位置との何れか一方を示す情報であってもよい。また、台車枠16全体の応力に基づいて、応力限界図にプロットを行ってもよい。
出力部411は、点検箇所特定情報を出力する。出力の形態としては、例えば、コンピュータディスプレイへの表示、外部装置への送信、および推定装置400の内部または外部の記憶媒体への記憶の少なくとも1つを採用することができる。
オペレータは、点検箇所特定情報に示される台車枠16の位置に基づいて、台車枠16の点検箇所を特定することができる。また、オペレータは、点検箇所特定情報に示される鉄道車両の走行位置に基づいて、軌道20の点検箇所を特定することができる。
図6のフローチャートを参照しながら、本実施形態の推定装置400を用いた推定方法の一例を説明する。図6のフローチャートのステップS601~S613の繰り返し処理は、サンプリング時刻が到来する度に実行されるものとする。
まず、ステップS601において、データ取得部401は、加速度センサ21a、21bで測定された加速度を示すデータと、鉄道車両の走行位置を示すデータと、を含むデータを取得する。
次に、ステップS602において、固有値解析部402は、(1)式の運動方程式に対する固有値解析を行うことにより、固有振動数ωおよび固有ベクトル{φ}を導出し、固有ベクトル{φ}で構成されるモード行列[φ]を導出する。
次に、ステップS604において、粘性導出部404は、モード行列[φ]と、台車枠16の粘性行列[C]と、を用いて、(4)式により、モード粘性行列[Cξ]を導出する。
次に、ステップS606において、外力導出部406は、加速度センサ21a、21bで測定された加速度のデータに基づいて、モノリンク18a、18bの変位ベクトル{u0}および速度ベクトル{u0・}と、軸バネ19a、19bの変位ベクトル{u0}および速度ベクトル{u0・}とをそれぞれ導出する。外力導出部406は、モノリンク18a、18bの変位ベクトル{u0}、速度ベクトル{u0・}、粘性行列[Cbc]、および剛性行列[Kbc]と、モード行列[φ]と、軸バネ19a、19bの変位ベクトル{u0}、速度ベクトル{u0・}、粘性行列[Cbc]、および剛性行列[Kbc]と、モード行列[φ]と、を用いて、(2)式および(13)式により、モード外力ベクトル{fξ}を導出する。
尚、ステップS603~S606の順番は、順不同である。
次に、ステップS609において、応力分布導出部407bは、メッシュの各要素eの内部における歪みテンソルと、台車枠16のヤング率Eおよびポアソン比νと、を用いて、(21)式~(23)式により、メッシュの各要素eの内部における応力テンソルを、台車枠16の応力分布として導出する。
次に、ステップS611において、判定部409は、応力-位置関係情報(応力の時間変化)に基づいて定められる平均応力および変動応力を応力限界図にプロットする。そして、判定部409は、プロットした点が、応力限界図の応力許容域内にあるか否かを判定する。この判定の結果、応力-位置関係情報(応力の時間変化)に基づいて定められる平均応力および変動応力を応力限界図にプロットした点が、応力限界図の応力許容域内にある場合、処理は、ステップS612を省略して後述するステップS613に進む。
次に、ステップS613において、推定装置400は、測定を終了するか否かを判定する。この判定は、例えば、オペレータによる推定装置400に対する所定の操作があったか否かに基づいて行われる。また、この判定は、予め定められたタイミングになったか否かに基づいて行われてもよい。予め定められたタイミングとしては、例えば、鉄道車両の所定の区間における走行が終了したタイミングが挙げられる。
一方、ステップS613の判定の結果、測定を終了する場合、処理は、ステップS614に進む。ステップS614に進むと、出力部411は、点検箇所特定情報を出力する。そして、図6のフローチャートによる処理が終了する。
以上のように本実施形態では、推定装置400は、軸箱17a、17bに取り付けられた加速度センサ21a、21bで測定された加速度のデータに基づいて、台車枠16の着力点31a、31b、32a、32bに作用する外力を導出する。推定装置400は、台車枠16に作用する外力の分布を、台車枠16の振動を表す運動方程式に与えて当該運動方程式を解くことにより、台車枠16の変位分布を導出する。推定装置400は、台車枠16の変位分布を用いて台車枠16の応力分布を導出する。従って、台車枠の検査箇所を予め指定し、台車枠の検査箇所にセンサを配置しなくても、鉄道車両が走行しているときの台車枠における応力分布を正確に推定することができる。よって、鉄道車両が走行しているときの台車枠の状態や軌道20の状態を正確に推定することができる。
本実施形態では、軸箱17a、17bに加速度センサ21a、21bを取り付ける場合を例に挙げて説明した。しかしながら、台車枠16の着力点に作用する外力を導出することが可能な物理量を測定するためのセンサであれば、軸箱17a、17bに取り付けられるセンサは、加速度センサに限定されない。例えば、歪みゲージであってもよい。ただし、歪みゲージは、長期間の使用により、正常に動作しなくなる虞がある。このため、本実施形態では、台車枠16の着力点に作用する外力を導出することが可能な物理量を測定するためのセンサとして、加速度センサを用いる。
次に、第2の実施形態を説明する。本実施形態では、台車枠16の所定の位置の変位を導出することが可能な物理量を測定するためのセンサを台車枠16に取り付ける。そして、本実施形態では、台車枠16の振動を表す運動方程式を解くことにより導出される変位分布のうち、前記所定の位置(当該センサが取り付けられた箇所に対応する位置)の変位と、当該センサで測定された変位と、に基づいて、台車枠16の振動を表す運動方程式を解くことにより導出される変位分布を補正するための補正パラメータを導出する。そして、台車枠16の振動を表す運動方程式を解くことにより導出される変位分布と、補正パラメータと、を用いて、台車枠16の変位分布を導出する。このように本実施形態は、第1の実施形態に対し、補正パラメータを用いることによる構成および処理が追加されたものである。従って、本実施形態の説明において、第1の実施形態と同一の部分については、図1~図6に付した符号と同一の符号を付す等して詳細な説明を省略する。
以下に、第1の実施形態の推定装置400が有する機能と異なる部分を中心に、本実施形態の推定装置400が有する機能の一例を説明する。本実施形態の推定装置400と第1の実施形態の推定装置400とでは、データ取得部401および変位分布導出部407aの機能の一部が異なる。
第1の実施形態では、データ取得部401は、サンプリング時刻が到来する度に、加速度センサ21a、21bで測定された加速度を示すデータと、鉄道車両の走行位置を示すデータと、を含むデータを取得する。これに対し、本実施形態のデータ取得部401は、加速度センサ21a、21bで測定された加速度を示すデータと、鉄道車両の走行位置を示すデータと、を含むデータに加えて、加速度センサ22a、22bで測定されたデータを取得する。
状態導出部407は、外力導出部406により導出された台車枠16の外力ベクトル{f}に基づいて、台車枠16の状態を表す情報を導出する。本実施形態の状態導出部407は、第1の実施形態の状態導出部407と同様に、変位分布導出部407aと、応力分布導出部407bとを有する。ただし、本実施形態の変位分布導出部407aおよび応力分布導出部407bが有する機能の一部は、第1の実施形態の変位分布導出部407aおよび応力分布導出部407bが有する機能と異なる。
変位分布導出部407aは、第1の実施形態の変位分布導出部407aと同様に、モード座標系における台車枠16の変位ベクトル{ξ}(モード変位ベクトル{ξ})を導出する。第1の実施形態の変位分布導出部407aでは、(19)式の計算を行う。これに対し、本実施形態の変位分布導出部407aは、モード座標系における台車枠16の変位ベクトル{ξ}を導出した後、修正係数ckを導出する。本実施形態では、修正係数ckが、モード座標系における台車枠16の変位ベクトル{ξ}を補正するための補正パラメータの一例である。そして、本実施形態の変位分布導出部407aは、修正係数ckと、モード座標系における台車枠16の変位ベクトル{ξ}と、モード行列[φ]と、を用いて、物理座標系における台車枠16の変位ベクトル{u}を、台車枠16の変位分布として導出する。以下に、修正係数ckを導出する方法の一例と、修正係数ckを用いて、物理座標系における台車枠16の変位ベクトル{u}を導出する方法の一例とを説明する。


コスト関数Jの値を最小にする修正係数ckは、例えば、以下の(27)式および(28)式で表される。尚、(26)式は、公知の手法で解くことができるので、ここでは、コスト関数Jの値を最小にする修正係数ckの導出過程の詳細な説明を省略する。

応力分布導出部407bは、(19)式を用いて導出される変位uq,iを成分とする実変位ベクトル{u}に代えて、(24)式を用いて導出される変位uq,iを成分とする実変位ベクトル{u}を用いて、第1の実施形態で説明した処理を実行する。
以下に、第1の実施形態の推定装置400を用いた推定方法と異なる部分を中心に、本実施形態の推定装置400を用いた推定方法一例を説明する。本実施形態の推定装置400を用いた推定方法と、第1の実施形態の推定装置400を用いた推定方法とでは、ステップS601、S607の処理の一部が異なる。
ステップS602~S606の処理は、第1の実施形態で説明した図6のフローチャートの処理と同じである。
ステップS608以降の処理は、第1の実施形態で説明した図6のフローチャートの処理と同じである。
以上のように本実施形態では、推定装置400は、加速度センサ22a、22bにより測定された台車枠16の所定の位置の変位と、台車枠16の運動を記述するモード座標系の運動方程式を解くことにより導出されるモード変位ベクトル{ξ}に対応する実変位ベクトル{u}のうち、前記所定の位置(加速度センサ22a、22bが取り付けられた箇所に対応する位置)の変位との差に基づいて、台車枠16の運動を記述するモード座標系の運動方程式における変位ベクトル{ξ}を補正するための修正係数ckを導出する。そして、推定装置400は、モード変位ベクトル{ξ}と、モード行列[φ]と、修正係数ckと、を用いて、台車枠16の変位分布を導出する。従って、台車枠の変位分布を、より一層正確に推定することができる。これにより、台車枠における応力分布を正確に推定することができる。
本実施形態においても、第1の実施形態で説明した種々の変形例を採用することができる。
次に、第3の実施形態を説明する。第1の実施形態および第2の実施形態では、有限要素法のメッシュの全ての節点qに対応するモード行列[φ]の成分φq,i (n)を用いて、メッシュの節点qにおけるxi軸方向の変位uq,iを導出する場合を例に挙げて説明した。しかしながら、このようにする場合、メッシュの全ての節点qの数と、自由度の数と、モード数nとの積の数だけ、モード行列[φ]の成分φq,i (n)が必要になる。また、所望の位置におけるモード行列[φ]の成分φq,i (n)を探索することが容易ではない。このため、計算時間が長くなる虞がある。そこで、本実施形態では、モード行列[φ](固有ベクトル{φ})の成分の近似値を導出し、モード行列[φ]の成分の近似値を用いて、メッシュの節点qにおけるxi軸方向の変位uq,iを導出する。このように本実施形態と第1の実施形態および第2の実施形態とは、モード行列[φ]の成分の近似値を導出することによる構成および処理が主として異なる。従って、本実施形態の説明において、第1の実施形態および第2の実施形態と同一の部分については、図1~図7に付した符号と同一の符号を付す等して詳細な説明を省略する。
本実施形態では、(1)式の運動方程式に固有値解析を適用することにより導出されるモード行列[φ](固有ベクトル{φ})の成分の一部を用いて、モード行列[φ]の成分の近似式を導出する。モード行列[φ]の成分の近似式は、モード行列[φ]の成分の近似値を計算するための式である。本実施形態では、カーネルリッジ回帰を行うことにより、モード行列[φ]の成分の近似式を導出する場合を例に挙げて説明する。更に、本実施形態では、カーネル関数としてガウスカーネルを用いる場合を例に挙げて説明する。


(29)式においてλj,i (p)は、ガウスカーネルψi (p)(xs,1,xs,2,xs,3)に対する重み係数である。本実施形態では、(31)式の行列方程式を用いてカーネルリッジ回帰を行うことにより重み係数λj,i (p)が導出される。




一次の固有振動モード、・・・、n次の固有振動モードのそれぞれに対して(31)式を作成する。即ち、(31)式のpの値に、1,2,・・・,nを与えて、モード数pの数だけ(31)式を作成する。そして、一次の固有振動モード、・・・、n次の固有振動モードのそれぞれに対する(31)式に基づいて、(34)式の計算をそれぞれ実行する。これにより行列Λ(重み係数λj,i (p))が導出される。行列Λ(重み係数λj,i (p))を(29)式に代入することにより、φ’s,i (1)(xs,1,xs,2,xs,3)、・・・、φ’s,i (n)(xs,1,xs,2,xs,3)を計算する近似式((29)式)が導出される。
図8は、推定装置800の機能的な構成の一例を示す図である。以下に、図8を参照しながら、第1の実施形態および第2の実施形態の推定装置400が有する機能と異なる部分を中心に、本実施形態の推定装置800が有する機能の一例を説明する。推定装置800のハードウェアは、例えば、推定装置400のハードウェアと同じもので実現される。尚、以下に説明する処理において、事前に設定する必要があるデータは、推定装置800に事前に記憶されているものとする。
近似式導出部801は、有限要素法のメッシュの節点qのうち、m’個の節点とm個の節点とを選択する。この選択は、例えば、乱数を用いてランダムに行うことができる。また、m’個の節点とm個の節点の位置は、オペレータによって指定されてもよい。尚、前述したように、m個の節点の位置とm’個の節点の位置とを同じにしてもよい。
近似式導出部801は、以上の行列Λ(重み係数λj,i (p))の導出を、一次の固有振動モード、・・・、n次の固有振動モードのそれぞれに対して行う。
近似式導出部801は、以上のようにして、モード行列[φ]の成分の近似値φ’s,i (1)(xs,1,xs,2,xs,3)、・・・、φ’s,i (n)(xs,1,xs,2,xs,3)を計算する近似式((29)式)としてn個の近似式を導出する。
近似値導出部802は、(29)式のxs,1,xs,2,xs,3に、物理座標系における台車枠16の変位分布を導出するために必要な位置sの物理座標系における座標を与える。そして、近似値導出部802は、(29)式により、p次の固有振動モード、位置s、およびxi軸方向に対応するモード行列[φ]の成分の近似値φ’s,i (p)(xs,1,xs,2,xs,3)を導出する。近似値導出部802は、p次の固有振動モード、位置s、およびxi軸方向に対応するモード行列[φ]の成分の近似値φ’s,i (p)(xs,1,xs,2,xs,3)の導出を、一次の固有振動モード、・・・、n次の固有振動モードのそれぞれについて行う。そして、近似値導出部802は、モード行列[φ]の成分の近似値φ’s,i (p)(xs,1,xs,2,xs,3)を、モード行列[φ]の成分としてモード行列[φ]に格納する。このようにして近似値φ’s,i (p)(xs,1,xs,2,xs,3)が格納されたモード行列[φ]は、固有ベクトル{φ}が格納されたモード行列[φ]の近似値となる。
以下に、第1の実施形態および第2の実施形態の推定装置400を用いた推定方法と異なる部分を中心に、本実施形態の推定装置800を用いた推定方法一例を説明する。本実施形態の推定装置800を用いた推定方法と、第1の実施形態および第2の実施形態の推定装置400を用いた推定方法とでは、ステップS602の処理の一部が異なる。また、図6のフローチャートによる処理が開始する前に、モード行列[φ]の成分の近似式(重み係数λj,i (p))が近似式導出部801により導出されている必要がある。
以上のように本実施形態では、推定装置800は、固有値解析部402で導出されたモード行列[φ]を用いて、カーネルリッジ回帰を行うことにより、モード行列[φ]の成分の近似式((29)式)を導出する。モード行列[φ]の成分の近似式は、モード行列[φ]の成分の近似値として、固有振動モードの次数p、位置s、位置sを定める座標系の自由度iに応じた近似値を計算する式である。推定装置800は、モード行列[φ]の成分の近似式を用いて、モード行列[φ]の成分の近似値φ’s,i (p)(xs,1,xs,2,xs,3)を導出する。従って、モード行列[φ]の成分として、任意の位置sにおける成分を導出することができる。よって、計算時間をより短くすることができる。
本実施形態では、カーネルリッジ回帰を行う際に、カーネル関数としてガウスカーネルを用いる場合を例に挙げて説明した。しかしながら、カーネル関数はガウスカーネルに限定されない。また、モード行列[φ]の成分の近似値φ’s,i (p)(xs,1,xs,2,xs,3)を、カーネルリッジ回帰以外の回帰分析の手法を用いて導出してもよい。例えば、カーネル回帰を用いてもよい。
その他、本実施形態においても、第1の実施形態および第2の実施形態で説明した種々の変形例を採用することができる。
次に、第4の実施形態を説明する。第1の実施形態、第2の実施形態、および第3の実施形態では、実変位ベクトル{u}を用いて、(20a)式~(20f)式により、メッシュの各要素eの内部における歪みテンソル(台車枠16の歪み分布)を導出する。また、メッシュの各要素eの内部における歪みテンソルを用いて、(21)式~(23)式により、メッシュの各要素eの内部における応力テンソル(台車枠16の応力分布)を導出する。(20a)式~(20f)により、メッシュの各要素eの内部における歪テンソルを導出する際に、FEMの形状関数が必要になる。そこで、本実施形態では、実変位ベクトル{u}に基づいて台車枠16の主歪みおよび主応力を導出することを、FEMの形状関数を用いずに実行する。このように本実施形態と、第1の実施形態、第2の実施形態、および第3の実施形態とは、実変位ベクトル{u}が導出された後の構成および処理が主として異なる。従って、本実施形態の説明において、第1の実施形態、第2の実施形態、および第3の実施形態と同一の部分については、図1~図8に付した符号と同一の符号を付す等して詳細な説明を省略する。本実施形態では、第1の実施形態の変位分布導出部407aにより実変位ベクトル{u}が導出される場合を例に挙げて説明する。
本発明者らは、推定対象領域における変位前の位置を示す座標をアフィン変換することにより変位後の位置を示す座標が表現されることに着目した。尚、当該変位前の位置、変位後の位置を示す座標は、物理座標系における座標(実空間座標)である。以下の説明では、物理座標系における座標を必要に応じて位置座標と称する。
変位前の位置座標を格納する縦ベクトルをX1とし、変位後の位置座標を格納する縦ベクトルをX2とする。縦ベクトルX1、X2は、以下の(35)式で表される。




変位分布導出部407aにより導出された実変位ベクトル{u}に含まれる変位uq,iのうち、推定対象領域に含まれるメッシュの節点qにおける変位を、変位前の位置座標に加算することにより、変位後のx1軸方向、x2軸方向、x3軸方向の位置座標の組が得られる。





半直積の演算のルールを用いて(47)式を、以下の(48)式のように分解する。

(1) 転置行列VTの中から回転行列を選択し、選択した回転行列に基づく回転角で物体を回転させる。
(2) 特異値を対角成分として有する対角行列Σに基づいて物体を歪み変形させる。
(3) 直交行列Uの中から回転行列を選択し、選択した回転行列に基づく回転角で物体を再び回転させる。
(4) 縦ベクトルvに基づいて物体を平行移動する。
前述したように、変位前のx1軸方向の位置座標x11、x2軸方向の位置座標x21、x3軸方向の位置座標x31と変位とに基づいて、変位後のx1軸方向の位置座標x12、x2軸方向の位置座標x22、x3軸方向の位置座標x32が導出される。そして、変位前のx1軸方向の位置座標x11、x2軸方向の位置座標x21、x3軸方向の位置座標x31と、変位後のx1軸方向の位置座標x12、x2軸方向の位置座標x22、x3軸方向の位置座標x32とに基づいて、未知係数a1~a12が導出される。即ち、行列Mの成分a1、a2、a3、a5、a6、a7、a9、a10、a11が導出される。そして、行列Mを特異値分解することにより、特異値を対角成分として有する対角行列Σが導出される。
本実施形態は、以上の知見に基づいてなされたものである。
位置座標導出部407cは、推定対象領域に含まれるメッシュの節点q(位置)における変位前の位置座標x11、x21、x31に、推定対象領域に含まれるメッシュの節点q(位置)における変位uq,1、uq,2、uq,3を加算することにより、推定対象領域に含まれるメッシュの節点q(位置)における変位後の位置座標x12、x22、x32を導出する。uq,1、uq,2、uq,3の1、2、3は、それぞれ、x1軸方向成分の値、x2軸方向成分の値、x3軸方向成分の値であることを表す。
行列導出部407dは、推定対象領域に含まれるメッシュの節点q(位置)における変位前の位置座標x11、x21、x31と、推定対象領域に含まれるメッシュの節点q(位置)における変位後の位置座標x12、x22、x32とに基づいて、行列Mの成分a1、a2、a3、a5、a6、a7、a9、a10、a11を導出する。尚、このとき、縦ベクトルvの成分a4、a8、a12を導出することもできる。本実施形態では、行列Mにより変換行列の一例が実現される。
特異値分解部407eは、行列導出部407dにより導出された成分a1、a2、a3、a5、a6、a7、a9、a10、a11を有する行列Mを特異値分解し、特異値を対角成分として有する対角行列Σを導出する。尚、このとき、直交行列U、直交行列Vの転置行列VTも導出される。
歪み導出部407fは、特異値分解部407eにより導出された対角行列Σに基づいて、推定対象領域における主歪みを導出する。本実施形態では、歪み導出部407fは、特異値分解部407eにより導出された対角行列Σの対角成分ε11、ε22、ε33を推定対象領域における主歪みとして導出する。以下の説明を簡単にするため、対角行列Σの対角成分ε11、ε22、ε33は、ε11≧ε22≧ε33となるように並べ変えられているものとする。また、歪み導出部407fは、以下の(49)式により、推定対象領域における最大主歪みεmaxを導出する。ここで、特異値分解部407eにより導出された対角行列Σの対角成分ε11、ε22、ε33のうち、符号を含めて最大の対角成分をε11とし、最小の対角成分をε33とする。

応力導出部407gは、歪み導出部407fにより導出された推定対象領域における主歪みに基づいて、推定対象領域における応力を導出する。本実施形態では、応力導出部407gは、推定対象領域における主歪み(対角行列Σの対角成分)ε11、ε22、ε33に基づいて、推定対象領域における主応力σ11、σ22、σ33を、以下の(50)式により導出する。

尚、(50)式において、対角行列Σの対角成分ε11、ε22、ε33から1を減算しているのは、本実施形態では、主歪みは1を基準とする値であるのに対し、主応力は0(ゼロ)を基準とする値だからである。即ち、本実施形態では、主歪みは1のときに歪みが生じていないことを示すのに対し、主応力は0(ゼロ)のときに応力が生じていないことを示す。尚、主応力は、0(ゼロ)を上回る場合、引張応力であることを示し、0(ゼロ)を下回る場合、圧縮応力であることを示す。
また、λ、μは、それぞれ、ラメ定数、剛性率である((22)式、(23)式を参照)。
応力導出部407gは、以上のようにして導出した推定対象領域における主応力σ11、σ22、σ33に基づいて、推定対象領域における最大主応力σmaxを、以下の(51)式により導出する。

第1の実施形態、第2の実施形態、および第3の実施形態では、応力-位置関係導出部408は、台車枠16の応力分布と、鉄道車両の走行位置と、を相互に関連付けて記憶する。本実施形態では、応力-位置関係導出部408は、応力導出部407gにより導出された推定対象領域における主応力σ11、σ22、σ33および最大主応力σmaxの少なくとも一方と、データ取得部401で取得されたデータに含まれる鉄道車両の走行位置と、を相互に関連付けて記憶する。尚、以下の説明では、応力-位置関係導出部408が、応力導出部407gにより導出された推定対象領域における最大主応力σmaxと、鉄道車両の走行位置と、を相互に関連付けて記憶する場合を例に挙げて説明する。本実施形態の説明では、このようにして相互に関連付けられた、推定対象領域における最大主応力σmaxと鉄道車両の走行位置を、必要に応じて、応力-位置関係情報と称する。以上のようにして各サンプリング時刻における応力-位置関係情報が得られる。
第1の実施形態、第2の実施形態、および第3の実施形態では、判定部409は、応力-位置関係情報(応力の時間変化)に基づいて定められる平均応力および変動応力が、応力限界図の応力許容域内にあるか否かを判定する。これに対し、本実施形態では、判定部409は、推定対象領域における最大主応力σmaxの絶対値が閾値を上回るか否かを判定する。
第1の実施形態、第2の実施形態、および第3の実施形態では、点検箇所特定情報導出部410は、応力限界図にプロットした点が、応力限界図の応力許容域内にない場合に、当該プロットが得られた台車枠16の位置と、当該プロットした点が応力限界図の応力許容域内にないときの鉄道車両の走行位置とを導出する。これに対し、本実施形態では、点検箇所特定情報導出部410は、最大主応力σmaxの絶対値が閾値を上回る推定対象領域と、当該推定対象領域における最大主応力σmaxの絶対値が閾値を上回るときの鉄道車両の走行位置とを導出する。
出力部411は、点検箇所特定情報を出力する。本実施形態では、最大主応力σmaxの絶対値が閾値を上回る推定対象領域と、当該推定対象領域における最大主応力σmaxの絶対値が閾値を上回るときの鉄道車両の走行位置とを示す情報が点検箇所特定情報となる。
図10のフローチャートを参照しながら、本実施形態の推定装置900を用いた推定方法の一例を説明する。図10のフローチャートのステップS601~S607、S1001~S1010の繰り返し処理は、サンプリング時刻が到来する度に実行されるものとする。
まず、ステップS601~S607の処理は、第1の実施形態で説明した図6のフローチャートによる処理と同じである。ステップS607において、変位分布導出部407aにより、実変位ベクトル{u}が、台車枠16の変位分布として導出される。ステップS607の処理の後、ステップS1001の処理が実行される。
次に、ステップS1004において、歪み導出部407fは、ステップS1003で導出された対角行列Σの対角成分ε11、ε22、ε33を推定対象領域における主歪みとして導出する。そして、歪み導出部407fは、(49)式により、推定対象領域における最大主歪みεmaxを導出する。
次に、ステップS1007において、判定部409は、推定対象領域における最大主応力σmaxの絶対値(|σmax|)が閾値を上回るか否かを判定する。この判定の結果、推定対象領域における最大主応力σmaxの絶対値が閾値を上回らない場合、処理は、ステップS1008を省略して後述するステップS1009に進む。
次に、ステップS1009において、推定装置900は、測定を終了するか否かを判定する。ステップS1009の処理は、例えば、第1の実施形態で説明した図6のステップS613の処理と同じである。
一方、ステップS1009の判定の結果、測定を終了する場合、処理は、ステップS1010に進む。処理がステップS1010に進むと、出力部411は、点検箇所特定情報を出力する。そして、図10のフローチャートによる処理が終了する。
尚、ステップS1010の処理を、ステップS1008の次に行ってもよい。この場合、点検箇所特定情報は、サンプリング時刻の単位で出力される。
以上のように本実施形態では、推定装置900は、推定対象領域における変位前の位置座標x11、x21、x31と、推定対象領域における変位後の位置座標x12、x22、x32とに基づいて、行列Mの成分a1、a2、a3、a5、a6、a7、a9、a10、a11を導出する。行列Mは、アフィン変換の際に変位前の位置座標x11、x21、x31に乗算される行列である。推定装置900は、行列Mを特異値分解し、特異値を対角成分として有する対角行列Σを導出する。推定装置900は、対角行列Σに基づいて、推定対象領域における主歪みε11、ε22、ε33を導出する。従って、実変位ベクトル{u}に基づいて台車枠16の主歪みおよび主応力を導出することを、FEMの形状関数を用いずに実行することができる。また、歪ゲージで歪みを測定しなくても(即ち、歪みそのものの測定値を得なくても)、歪みを導出することができる。よって、歪ゲージで歪みを測定しなくても、外力が作用する物体の状態を推定することができる。尚、本実施形態では、実変位ベクトル{u}に含まれる変位uq,iを示すメッシュの節点qに基づいて推定対象領域を定める。従って、推定対象領域として様々な領域を設定することができる。
本実施形態においても、第1の実施形態、第2の実施形態、および第3の実施形態で説明した種々の変形例を採用することができる。また、第2の実施形態または第3の実施形態に対して本実施形態の手法を適用してもよい。
推定装置400のハードウェアの一例について説明する。推定装置800、900のハードウェアは、推定装置400のハードウェアと同じもので実現することができる。従って、ここでは、推定装置800、900のハードウェアの詳細な説明を省略する。図11において、推定装置400は、CPU1101、主記憶装置1102、補助記憶装置1103、通信回路1104、信号処理回路1105、画像処理回路1106、I/F回路1107、ユーザインターフェース1108、ディスプレイ1109、およびバス1110を有する。
画像処理回路1106は、CPU1101による制御に従って入力した信号に対し、各種の画像処理を行う。この画像処理が行われた信号は、ディスプレイ1109に出力される。
ユーザインターフェース1108は、オペレータが推定装置400に対して指示を行う部分である。ユーザインターフェース1108は、例えば、ボタン、スイッチ、およびダイヤル等を有する。また、ユーザインターフェース1108は、ディスプレイ1109を用いたグラフィカルユーザインターフェースを有していてもよい。
出力部411は、例えば、通信回路1104および信号処理回路1105と、画像処理回路1106、I/F回路1107、およびディスプレイ1109との少なくとも何れか一方を用いることにより実現される。
次に、実施例を説明する。本実施例では、実際の鉄道車両の台車枠をモデル化し、第1の実施形態および第2の実施形態で説明した手法のそれぞれにおいて、台車枠の応力分布を導出した。本実施例では、台車枠は、ばね帽およびモノリンクから外力を受けるものとした。また、第2の実施形態で説明した手法では、台車枠に複数の加速度センサを取り付けた。導出した応力分布を調べた結果、平均応力および変動応力を応力限界図にプロットした点が応力限界図の応力許容域内に入らない箇所が存在した。当該プロットした点が応力限界図の応力許容域内にないときの鉄道車両の走行位置に対応する軌道を点検したところ、軌道不整が発生していることが判明した。
本実施例では、有限要素法のメッシュの節点qjの数を400000とした。400000個のメッシュの節点qjのうち、モード行列[φ]の成分の近似式に用いるメッシュの節点qjの数mを1000とした。m(=1000)個の節点の位置を、台車枠に対してランダムに設定した。m個の節点の位置とm’個の節点の位置とを全て同じにした。
また、鉄道車両を走行させた場合の基準点における最大主応力を基準点に取り付けた歪ゲージの測定値に基づいて導出した。
尚、以上説明した本発明の実施形態は、コンピュータがプログラムを実行することによって実現することができる。また、前記プログラムを記録したコンピュータ読み取り可能な記録媒体及び前記プログラム等のコンピュータプログラムプロダクトも本発明の実施形態として適用することができる。記録媒体としては、例えば、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD-ROM、磁気テープ、不揮発性のメモリカード、ROM等を用いることができる。
また、以上説明した本発明の実施形態は、何れも本発明を実施するにあたっての具体化の例を示したものに過ぎず、これらによって本発明の技術的範囲が限定的に解釈されてはならないものである。すなわち、本発明はその技術思想、またはその主要な特徴から逸脱することなく、様々な形で実施することができる。
Claims (20)
- 台車枠と、前記台車枠に直接または他の部品を介して接続された接続部品と、を有する鉄道車両の状態を推定する推定装置であって、
前記接続部品に取り付けられた第1のセンサで、前記鉄道車両の走行中に測定された第1の測定データを取得するデータ取得手段と、
前記第1の測定データに基づいて、前記台車枠の着力箇所に作用する外力を導出し、前記台車枠の着力箇所に作用する外力に基づいて、前記台車枠に作用する外力の分布を導出する外力導出手段と、
前記台車枠に作用する外力の分布に基づいて、前記台車枠の状態を表す情報を導出する状態導出手段と、を有し、
前記第1のセンサは、前記台車枠の着力箇所に作用する外力を導出することが可能な物理量を測定するためのセンサであり、
前記台車枠の着力箇所は、前記台車枠において、前記接続部品により発生する外力が作用する箇所であり、
前記状態導出手段は、前記台車枠の振動を表す運動方程式を解くことにより、前記台車枠の変位の分布を前記台車枠の状態を表す情報として導出する変位分布導出手段を少なくとも有し、
前記台車枠の振動を表す運動方程式における外力の分布には、前記外力導出手段により導出された前記台車枠に作用する外力の分布が与えられることを特徴とする推定装置。 - 前記データ取得手段は、前記台車枠に取り付けられた第2のセンサで測定された第2の測定データを更に取得し、
前記変位分布導出手段は、前記台車枠の振動を表す運動方程式を解くことにより導出した変位の分布を補正するための補正パラメータを導出し、前記台車枠の振動を表す運動方程式を解くことにより導出した前記台車枠の変位の分布と、前記補正パラメータとを用いて、前記台車枠の変位の分布を導出し、
前記第2のセンサは、前記台車枠の所定の位置の変位を導出することが可能な物理量を測定するためのセンサであり、
前記変位分布導出手段は、前記第2の測定データに基づいて導出された前記台車枠の所定の位置の変位と、前記台車枠の振動を表す運動方程式を解くことにより導出した前記台車枠の変位の分布のうち前記所定の位置の変位と、を用いて、前記補正パラメータを導出することを特徴とする請求項1に記載の推定装置。 - 前記外力導出手段は、前記第1の測定データに基づいて、物理座標系において前記台車枠に作用する外力の分布を導出し、当該台車枠に作用する外力の分布を、モード行列を用いて、モード座標系における前記台車枠に作用する外力の分布に変換し、
前記モード行列は、物理座標系の前記台車枠の振動を表す運動方程式に対する固有値解析の結果に基づいて導出され、
前記変位分布導出手段は、モード座標系における前記台車枠の振動を表す運動方程式を解くことにより、モード座標系における前記台車枠の変位の分布を導出し、当該モード座標系における前記台車枠の変位の分布を、前記モード行列を用いて、物理座標系における前記台車枠の変位の分布に変換し、
モード座標系における前記台車枠の振動を表す運動方程式における外力の分布には、前記外力導出手段により導出されたモード座標系における前記台車枠に作用する外力の分布が与えられることを特徴とする請求項1または2に記載の推定装置。 - 前記データ取得手段は、前記台車枠に取り付けられた第2のセンサで測定された第2の測定データを更に取得し、
前記変位分布導出手段は、モード座標系における前記台車枠の振動を表す運動方程式を解くことにより導出した変位の分布を補正するための補正パラメータを導出し、モード座標系における前記台車枠の振動を表す運動方程式を解くことにより導出した前記台車枠の変位の分布を、前記補正パラメータと、前記モード行列とを用いて、物理座標系における前記台車枠の変位の分布に変換し、
前記第2のセンサは、前記台車枠の所定の位置の変位を導出することが可能な物理量を測定するためのセンサであり、
前記変位分布導出手段は、前記第2の測定データに基づいて導出された前記台車枠の所定の位置の変位と、モード座標系における前記台車枠の振動を表す運動方程式を解くことにより導出したモード座標系における前記台車枠の変位の分布のうち前記所定の位置の変位と、前記モード行列と、を用いて、前記補正パラメータを導出することを特徴とする請求項3に記載の推定装置。 - 物理座標系の前記台車枠の振動を表す運動方程式に対する固有値解析を行うことにより前記モード行列を導出する固有値解析手段を更に有することを特徴とする請求項3または4に記載の推定装置。
- 前記モード行列の成分の近似式を用いて、前記モード行列の成分の近似値を導出する近似値導出手段を更に有し、
前記モード行列の成分の近似式は、前記固有値解析により導出された固有ベクトルに基づいて導出される式であり、
前記モード行列の成分の近似式は、前記モード行列の成分の近似値として、固有振動モードの次数、位置、および位置を定める座標系の自由度に応じた近似値を計算する式であり、
前記モード行列の成分には、前記近似値導出手段により導出された前記モード行列の成分の近似値が含まれることを特徴とする請求項3~5の何れか1項に記載の推定装置。 - 前記モード行列の成分の近似式は、前記固有値解析により導出された固有ベクトルに基づいて、カーネルリッジ回帰分析を行うことにより導出される式であることを特徴とする請求項6に記載の推定装置。
- 前記状態導出手段は、前記変位分布導出手段により導出された前記台車枠の変位の分布に基づいて、前記台車枠の応力の分布を前記台車枠の状態を表す情報として導出する応力分布導出手段を更に有することを特徴とする請求項1~7の何れか1項に記載の推定装置。
- 前記状態導出手段は、前記台車枠の少なくとも3箇所の点における変位前の位置座標と、前記変位分布導出手段により導出された前記台車枠の変位のうち、前記台車枠の少なくとも3箇所の点における変位とに基づいて、前記台車枠の少なくとも3箇所の点における変位後の位置座標を導出する位置座標導出手段と、
前記台車枠の少なくとも3箇所の点における変位前の位置座標と、前記位置座標導出手段により導出された前記台車枠の少なくとも3箇所の点における変位後の位置座標とに基づいて、変換行列の成分を導出する行列導出手段と、
前記行列導出手段により導出された前記成分を有する前記変換行列を特異値分解する特異値分解手段と、
前記特異値分解手段により特異値分解を実行することにより導出された対角行列の成分である特異値を、前記台車枠の主歪みとして導出する歪み導出手段と、を更に有し、
前記変換行列は、前記台車枠の少なくとも3箇所の点における変位前の位置座標をアフィン変換して前記台車枠の少なくとも3箇所の点における変位後の位置座標を導出する際に前記台車枠の少なくとも3箇所の点における変位前の位置座標に乗算される行列であることを特徴とする請求項1~7の何れか1項に記載の推定装置。 - 前記歪み導出手段は、前記対角行列に基づいて、前記台車枠の最大主歪みを更に導出することを特徴とする請求項9に記載の推定装置。
- 前記状態導出手段は、前記歪み導出手段により導出された前記台車枠の主歪みに基づいて、前記台車枠の主応力を導出する応力導出手段を更に有することを特徴とする請求項9または10に記載の推定装置。
- 前記応力導出手段は、前記台車枠の主応力に基づいて、前記台車枠の最大主応力を更に導出することを特徴とする請求項11に記載の推定装置。
- 前記少なくとも3箇所の点は、少なくとも4箇所の点であり、
前記位置座標は、3軸の座標系における位置座標であることを特徴とする請求項9~12の何れか1項に記載の推定装置。 - 前記台車枠および軌道の少なくとも一方の点検箇所を特定するための情報である点検箇所特定情報を導出する点検箇所特定情報導出手段を更に有し、
前記データ取得手段は、前記鉄道車両の走行位置を示す走行位置データを更に取得し、
前記点検箇所特定情報導出手段は、前記状態導出手段により導出された前記台車枠の状態を表す情報に基づく所定の指標値と、前記走行位置データと、に基づいて、前記点検箇所特定情報を導出することを特徴とする請求項1~13の何れか1項に記載の推定装置。 - 前記鉄道車両は、軸箱を更に有し、
前記接続部品は、前記軸箱であることを特徴とする請求項1~14の何れか1項に記載の推定装置。 - 前記第1のセンサは、加速度センサであることを特徴とする請求項1~15の何れか1項に記載の推定装置。
- 前記外力導出手段は、前記第1のセンサが取り付けられた前記鉄道車両と同一の前記鉄道車両の前記台車枠の着力箇所に作用する外力を、当該第1のセンサで前記鉄道車両の走行中に測定された第1の測定データに基づいて導出することを特徴とする請求項1~16の何れか1項に記載の推定装置。
- 前記外力導出手段は、前記第1のセンサが取り付けられた前記鉄道車両と異なる前記鉄道車両の前記台車枠の着力箇所に作用する外力を、当該第1のセンサで前記鉄道車両の走行中に測定された第1の測定データに基づいて導出し、
前記第1のセンサが取り付けられた前記鉄道車両と異なる前記鉄道車両は、前記第1のセンサが取り付けられた前記鉄道車両と同一の編成の鉄道車両であることを特徴とする請求項1~17の何れか1項に記載の推定装置。 - 台車枠と、前記台車枠に直接または他の部品を介して接続された接続部品と、を有する鉄道車両の状態を推定する推定方法であって、
前記接続部品に取り付けられた第1のセンサで前記鉄道車両の走行中に測定された第1の測定データを取得するデータ取得工程と、
前記第1の測定データに基づいて、前記台車枠の着力箇所に作用する外力を導出し、前記台車枠の着力箇所に作用する外力に基づいて、前記台車枠に作用する外力の分布を導出する外力導出工程と、
前記台車枠に作用する外力の分布に基づいて、前記台車枠の状態を表す情報を導出する状態導出工程と、を有し、
前記第1のセンサは、前記台車枠の着力箇所に作用する外力を導出することが可能な物理量を測定するためのセンサであり、
前記台車枠の着力箇所は、前記台車枠において、前記接続部品により発生する外力が作用する箇所であり、
前記状態導出工程は、前記台車枠の振動を表す運動方程式を解くことにより、前記台車枠の変位の分布を前記台車枠の状態を表す情報として導出する変位分布導出工程を少なくとも有し、
前記台車枠の振動を表す運動方程式における外力の分布には、前記外力導出工程により導出された前記台車枠に作用する外力の分布が与えられることを特徴とする推定方法。 - 台車枠と、前記台車枠に直接または他の部品を介して接続された接続部品と、を有する鉄道車両の状態を推定するための処理をコンピュータに実行させるためのプログラムであって、
前記接続部品に取り付けられた第1のセンサで前記鉄道車両の走行中に測定された第1の測定データを取得するデータ取得工程と、
前記第1の測定データに基づいて、前記台車枠の着力箇所に作用する外力を導出し、前記台車枠の着力箇所に作用する外力に基づいて、前記台車枠に作用する外力の分布を導出する外力導出工程と、
前記台車枠に作用する外力の分布に基づいて、前記台車枠の状態を表す情報を導出する状態導出工程と、をコンピュータに実行させ、
前記第1のセンサは、前記台車枠の着力箇所に作用する外力を導出することが可能な物理量を測定するためのセンサであり、
前記台車枠の着力箇所は、前記台車枠において、前記接続部品により発生する外力が作用する箇所であり、
前記状態導出工程は、前記台車枠の振動を表す運動方程式を解くことにより、前記台車枠の変位の分布を前記台車枠の状態を表す情報として導出する変位分布導出工程を少なくとも有し、
前記台車枠の振動を表す運動方程式における外力の分布には、前記外力導出工程により導出された前記台車枠に作用する外力の分布が与えられることを特徴とするプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019121751 | 2019-06-28 | ||
| JP2019121751 | 2019-06-28 | ||
| PCT/JP2020/022514 WO2020261959A1 (ja) | 2019-06-28 | 2020-06-08 | 推定装置、推定方法、およびプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2020261959A1 JPWO2020261959A1 (ja) | 2020-12-30 |
| JPWO2020261959A5 JPWO2020261959A5 (ja) | 2022-03-17 |
| JP7184191B2 true JP7184191B2 (ja) | 2022-12-06 |
Family
ID=74060842
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021527620A Active JP7184191B2 (ja) | 2019-06-28 | 2020-06-08 | 推定装置、推定方法、およびプログラム |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3992052A4 (ja) |
| JP (1) | JP7184191B2 (ja) |
| CN (1) | CN114096454B (ja) |
| WO (1) | WO2020261959A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023199369A1 (ja) * | 2022-04-11 | 2023-10-19 | 株式会社日立製作所 | 寿命評価装置および方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004203171A (ja) | 2002-12-25 | 2004-07-22 | Railway Technical Res Inst | 鉄道車両用車体の弾性振動低減方法 |
| JP2012107987A (ja) | 2010-11-17 | 2012-06-07 | Railway Technical Research Institute | 浮上式車両の模型実験装置におけるサスペンション相互作用力を用いた台車運動再現方法 |
| WO2017164133A1 (ja) | 2016-03-23 | 2017-09-28 | 新日鐵住金株式会社 | 検査システム、検査方法、およびプログラム |
| JP2018155517A (ja) | 2017-03-15 | 2018-10-04 | 三菱重工業株式会社 | 車両の監視装置、監視方法、プログラム |
| WO2018176072A1 (de) | 2017-03-30 | 2018-10-04 | Pj Messtechnik Gmbh | Vorrichtung zum messen von radaufstandskräften eines schienenfahrzeugs |
| JP2019028007A (ja) | 2017-08-03 | 2019-02-21 | 新日鐵住金株式会社 | 鉄道車両用シミュレーション装置、方法、及びプログラム |
| WO2019043859A1 (ja) | 2017-08-31 | 2019-03-07 | 新日鐵住金株式会社 | 検査システム、検査方法、およびプログラム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN202368605U (zh) * | 2011-10-19 | 2012-08-08 | 北京鼎汉检测技术有限公司 | 一种动态检测铁路轨道左右钢轨轨向的检测装置 |
| CN108698622B (zh) * | 2016-03-15 | 2019-12-10 | 日本制铁株式会社 | 轨道状态评价方法、装置以及程序 |
| JP6935341B2 (ja) | 2018-01-11 | 2021-09-15 | ヤマハ発動機株式会社 | 部品供給装置および部品実装装置 |
-
2020
- 2020-06-08 CN CN202080047787.0A patent/CN114096454B/zh active Active
- 2020-06-08 JP JP2021527620A patent/JP7184191B2/ja active Active
- 2020-06-08 EP EP20833367.4A patent/EP3992052A4/en active Pending
- 2020-06-08 WO PCT/JP2020/022514 patent/WO2020261959A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004203171A (ja) | 2002-12-25 | 2004-07-22 | Railway Technical Res Inst | 鉄道車両用車体の弾性振動低減方法 |
| JP2012107987A (ja) | 2010-11-17 | 2012-06-07 | Railway Technical Research Institute | 浮上式車両の模型実験装置におけるサスペンション相互作用力を用いた台車運動再現方法 |
| WO2017164133A1 (ja) | 2016-03-23 | 2017-09-28 | 新日鐵住金株式会社 | 検査システム、検査方法、およびプログラム |
| JP2018155517A (ja) | 2017-03-15 | 2018-10-04 | 三菱重工業株式会社 | 車両の監視装置、監視方法、プログラム |
| WO2018176072A1 (de) | 2017-03-30 | 2018-10-04 | Pj Messtechnik Gmbh | Vorrichtung zum messen von radaufstandskräften eines schienenfahrzeugs |
| JP2019028007A (ja) | 2017-08-03 | 2019-02-21 | 新日鐵住金株式会社 | 鉄道車両用シミュレーション装置、方法、及びプログラム |
| WO2019043859A1 (ja) | 2017-08-31 | 2019-03-07 | 新日鐵住金株式会社 | 検査システム、検査方法、およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114096454A (zh) | 2022-02-25 |
| JPWO2020261959A1 (ja) | 2020-12-30 |
| CN114096454B (zh) | 2024-05-10 |
| WO2020261959A1 (ja) | 2020-12-30 |
| EP3992052A1 (en) | 2022-05-04 |
| EP3992052A4 (en) | 2022-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113358053B (zh) | 轨道不平顺检测评估系统、方法、电子设备及轨道车辆 | |
| Muñoz et al. | Estimation of lateral track irregularity through Kalman filtering techniques | |
| KR20130029101A (ko) | 강체특성 식별장치 및 강체특성 식별방법 | |
| JP7396139B2 (ja) | 計測方法、計測装置、計測システム及び計測プログラム | |
| JP7184191B2 (ja) | 推定装置、推定方法、およびプログラム | |
| JP6580532B2 (ja) | 歯車装置のかみ合い状態推定方法およびプログラム | |
| CN116698316A (zh) | 基于车辆振动信号的桥梁振型识别方法 | |
| CN105588675B (zh) | 用于识别车辆接口中的力的系统以及方法 | |
| JP7553778B2 (ja) | 推定装置、推定方法、およびプログラム | |
| JP7024874B2 (ja) | 検査システム、検査方法、およびプログラム | |
| CN114322911A (zh) | 一种联合卡尔曼滤波的桥梁路面平整度间接精准识别方法 | |
| JP7160210B2 (ja) | 処理装置、処理方法、およびプログラム | |
| CN116972798A (zh) | 基于有限车辆响应的桥梁路面不平整度识别方法 | |
| Chen et al. | Centralized load decoupling of a rotational multi-axis force sensor for measuring wheel-terrain interaction forces | |
| JP7017179B2 (ja) | 検査システム、検査方法、およびプログラム | |
| JP7088315B2 (ja) | 検査システム、検査方法、およびプログラム | |
| JP7453542B2 (ja) | 推定装置、推定方法、およびプログラム | |
| JP6535208B2 (ja) | 振動解析モデルの構造同定装置及びその同定方法 | |
| JP2019119306A (ja) | 接触角推定システム、接触角推定方法、およびプログラム | |
| JP2023078731A (ja) | 処理装置、処理方法、およびプログラム | |
| Baeza et al. | Comprehensive model of a rotating flexible wheelset for high-frequency railway dynamics | |
| WO2024047741A1 (ja) | 推定方法、推定装置、及び推定プログラム | |
| JP2024054650A (ja) | 処理装置、処理方法、およびプログラム | |
| JP2024057818A (ja) | 処理装置、処理方法、およびプログラム | |
| JP7099637B2 (ja) | 検査システム、検査方法、およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211224 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220906 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220922 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221025 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221107 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7184191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |