JP7086330B2 - 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 - Google Patents
物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 Download PDFInfo
- Publication number
- JP7086330B2 JP7086330B2 JP2020513819A JP2020513819A JP7086330B2 JP 7086330 B2 JP7086330 B2 JP 7086330B2 JP 2020513819 A JP2020513819 A JP 2020513819A JP 2020513819 A JP2020513819 A JP 2020513819A JP 7086330 B2 JP7086330 B2 JP 7086330B2
- Authority
- JP
- Japan
- Prior art keywords
- shadow
- scanner
- caster
- shadow caster
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 description 94
- 210000004556 brain Anatomy 0.000 description 92
- 239000000463 material Substances 0.000 description 73
- 238000004422 calculation algorithm Methods 0.000 description 71
- 239000004033 plastic Substances 0.000 description 69
- 229920003023 plastic Polymers 0.000 description 69
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 64
- 229910000831 Steel Inorganic materials 0.000 description 64
- 229910052802 copper Inorganic materials 0.000 description 64
- 239000010949 copper Substances 0.000 description 64
- 239000010959 steel Substances 0.000 description 64
- 238000004458 analytical method Methods 0.000 description 61
- 230000015654 memory Effects 0.000 description 61
- 238000001356 surgical procedure Methods 0.000 description 42
- 239000013307 optical fiber Substances 0.000 description 37
- 239000002131 composite material Substances 0.000 description 36
- 230000006870 function Effects 0.000 description 36
- 229910052751 metal Inorganic materials 0.000 description 36
- 238000010276 construction Methods 0.000 description 35
- 239000002184 metal Substances 0.000 description 35
- 210000005013 brain tissue Anatomy 0.000 description 33
- 229920001296 polysiloxane Polymers 0.000 description 33
- 238000010408 sweeping Methods 0.000 description 33
- 239000002023 wood Substances 0.000 description 33
- 229910001369 Brass Inorganic materials 0.000 description 32
- 229920000049 Carbon (fiber) Polymers 0.000 description 32
- 229910052782 aluminium Inorganic materials 0.000 description 32
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 32
- 239000010951 brass Substances 0.000 description 32
- 239000004917 carbon fiber Substances 0.000 description 32
- 238000001914 filtration Methods 0.000 description 32
- 229910001220 stainless steel Inorganic materials 0.000 description 32
- 239000010935 stainless steel Substances 0.000 description 32
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 31
- 238000005253 cladding Methods 0.000 description 31
- 230000003287 optical effect Effects 0.000 description 31
- 239000011701 zinc Substances 0.000 description 31
- 229910052725 zinc Inorganic materials 0.000 description 31
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 30
- 210000001519 tissue Anatomy 0.000 description 30
- 238000005286 illumination Methods 0.000 description 29
- 229920000915 polyvinyl chloride Polymers 0.000 description 29
- 239000004800 polyvinyl chloride Substances 0.000 description 29
- 238000010586 diagram Methods 0.000 description 24
- 239000000835 fiber Substances 0.000 description 24
- 230000001419 dependent effect Effects 0.000 description 23
- 239000011152 fibreglass Substances 0.000 description 22
- 230000033001 locomotion Effects 0.000 description 22
- 238000002595 magnetic resonance imaging Methods 0.000 description 19
- 230000003190 augmentative effect Effects 0.000 description 18
- 230000005855 radiation Effects 0.000 description 18
- 238000003860 storage Methods 0.000 description 16
- 230000008859 change Effects 0.000 description 14
- 238000004891 communication Methods 0.000 description 14
- 239000004973 liquid crystal related substance Substances 0.000 description 14
- 230000008569 process Effects 0.000 description 13
- 230000007704 transition Effects 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 12
- 238000006073 displacement reaction Methods 0.000 description 12
- 229910052736 halogen Inorganic materials 0.000 description 12
- 150000002367 halogens Chemical class 0.000 description 12
- 150000002739 metals Chemical class 0.000 description 12
- 230000015572 biosynthetic process Effects 0.000 description 11
- 238000005755 formation reaction Methods 0.000 description 11
- 238000001454 recorded image Methods 0.000 description 11
- 239000003365 glass fiber Substances 0.000 description 10
- 238000011109 contamination Methods 0.000 description 9
- 206010052428 Wound Diseases 0.000 description 8
- 208000027418 Wounds and injury Diseases 0.000 description 8
- 238000003491 array Methods 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 239000011521 glass Substances 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 230000002829 reductive effect Effects 0.000 description 8
- 230000003068 static effect Effects 0.000 description 8
- 210000005166 vasculature Anatomy 0.000 description 8
- 206010028980 Neoplasm Diseases 0.000 description 7
- 239000003086 colorant Substances 0.000 description 7
- 238000001727 in vivo Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000001020 rhythmical effect Effects 0.000 description 7
- 230000002792 vascular Effects 0.000 description 7
- 210000004204 blood vessel Anatomy 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 238000010146 3D printing Methods 0.000 description 4
- 230000003213 activating effect Effects 0.000 description 4
- 230000004913 activation Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 4
- 230000036772 blood pressure Effects 0.000 description 4
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 4
- 230000009849 deactivation Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 230000009189 diving Effects 0.000 description 4
- 238000011065 in-situ storage Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 4
- 208000000453 Skin Neoplasms Diseases 0.000 description 3
- 201000011510 cancer Diseases 0.000 description 3
- 238000002591 computed tomography Methods 0.000 description 3
- 239000004020 conductor Substances 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 238000007428 craniotomy Methods 0.000 description 3
- 238000013499 data model Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000003973 paint Substances 0.000 description 3
- 201000000849 skin cancer Diseases 0.000 description 3
- 238000001228 spectrum Methods 0.000 description 3
- 238000013334 tissue model Methods 0.000 description 3
- 206010010904 Convulsion Diseases 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 2
- 206010047289 Ventricular extrasystoles Diseases 0.000 description 2
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 2
- 210000000988 bone and bone Anatomy 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 210000003710 cerebral cortex Anatomy 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 206010015037 epilepsy Diseases 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000000670 limiting effect Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 239000012528 membrane Substances 0.000 description 2
- 238000012636 positron electron tomography Methods 0.000 description 2
- 230000010349 pulsation Effects 0.000 description 2
- 206010040882 skin lesion Diseases 0.000 description 2
- 231100000444 skin lesion Toxicity 0.000 description 2
- 210000004872 soft tissue Anatomy 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 239000012780 transparent material Substances 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- QNRATNLHPGXHMA-XZHTYLCXSA-N (r)-(6-ethoxyquinolin-4-yl)-[(2s,4s,5r)-5-ethyl-1-azabicyclo[2.2.2]octan-2-yl]methanol;hydrochloride Chemical group Cl.C([C@H]([C@H](C1)CC)C2)CN1[C@@H]2[C@H](O)C1=CC=NC2=CC=C(OCC)C=C21 QNRATNLHPGXHMA-XZHTYLCXSA-N 0.000 description 1
- 206010005746 Blood pressure fluctuation Diseases 0.000 description 1
- 206010014970 Ephelides Diseases 0.000 description 1
- 208000036119 Frailty Diseases 0.000 description 1
- 208000003351 Melanosis Diseases 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 240000007594 Oryza sativa Species 0.000 description 1
- 235000007164 Oryza sativa Nutrition 0.000 description 1
- 206010039509 Scab Diseases 0.000 description 1
- 208000025865 Ulcer Diseases 0.000 description 1
- 208000000260 Warts Diseases 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 210000001367 artery Anatomy 0.000 description 1
- 206010003549 asthenia Diseases 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 238000010009 beating Methods 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 210000001736 capillary Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 206010012601 diabetes mellitus Diseases 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 210000005069 ears Anatomy 0.000 description 1
- 208000028329 epileptic seizure Diseases 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 230000009931 harmful effect Effects 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000003278 mimic effect Effects 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000012831 peritoneal equilibrium test Methods 0.000 description 1
- 210000003446 pia mater Anatomy 0.000 description 1
- 238000012877 positron emission topography Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000004321 preservation Methods 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000010076 replication Effects 0.000 description 1
- 235000009566 rice Nutrition 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 201000010153 skin papilloma Diseases 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 230000003319 supportive effect Effects 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 238000011282 treatment Methods 0.000 description 1
- 231100000397 ulcer Toxicity 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 210000001604 vasa vasorum Anatomy 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- 230000029663 wound healing Effects 0.000 description 1
Images










































































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/2433—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures for measuring outlines by shadow casting
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/254—Projection of a pattern, viewing through a pattern, e.g. moiré
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00165—Optical arrangements with light-conductive means, e.g. fibre optics
- A61B1/00167—Details of optical fibre bundles, e.g. shape or fibre distribution
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00172—Optical arrangements with means for scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00194—Optical arrangements adapted for three-dimensional imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0605—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements for spatially modulated illumination
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/0646—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements with illumination filters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/07—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements using light-conductive means, e.g. optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/20—Surgical microscopes characterised by non-optical aspects
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/10—Processes of additive manufacturing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C64/00—Additive manufacturing, i.e. manufacturing of three-dimensional [3D] objects by additive deposition, additive agglomeration or additive layering, e.g. by 3D printing, stereolithography or selective laser sintering
- B29C64/20—Apparatus for additive manufacturing; Details thereof or accessories therefor
- B29C64/264—Arrangements for irradiation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y10/00—Processes of additive manufacturing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y30/00—Apparatus for additive manufacturing; Details thereof or accessories therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21K—NON-ELECTRIC LIGHT SOURCES USING LUMINESCENCE; LIGHT SOURCES USING ELECTROCHEMILUMINESCENCE; LIGHT SOURCES USING CHARGES OF COMBUSTIBLE MATERIAL; LIGHT SOURCES USING SEMICONDUCTOR DEVICES AS LIGHT-GENERATING ELEMENTS; LIGHT SOURCES NOT OTHERWISE PROVIDED FOR
- F21K9/00—Light sources using semiconductor devices as light-generating elements, e.g. using light-emitting diodes [LED] or lasers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21V—FUNCTIONAL FEATURES OR DETAILS OF LIGHTING DEVICES OR SYSTEMS THEREOF; STRUCTURAL COMBINATIONS OF LIGHTING DEVICES WITH OTHER ARTICLES, NOT OTHERWISE PROVIDED FOR
- F21V1/00—Shades for light sources, i.e. lampshades for table, floor, wall or ceiling lamps
- F21V1/02—Frames
- F21V1/08—Frames adjustable
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21V—FUNCTIONAL FEATURES OR DETAILS OF LIGHTING DEVICES OR SYSTEMS THEREOF; STRUCTURAL COMBINATIONS OF LIGHTING DEVICES WITH OTHER ARTICLES, NOT OTHERWISE PROVIDED FOR
- F21V1/00—Shades for light sources, i.e. lampshades for table, floor, wall or ceiling lamps
- F21V1/10—Rotating shades
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21V—FUNCTIONAL FEATURES OR DETAILS OF LIGHTING DEVICES OR SYSTEMS THEREOF; STRUCTURAL COMBINATIONS OF LIGHTING DEVICES WITH OTHER ARTICLES, NOT OTHERWISE PROVIDED FOR
- F21V11/00—Screens not covered by groups F21V1/00, F21V3/00, F21V7/00 or F21V9/00
- F21V11/08—Screens not covered by groups F21V1/00, F21V3/00, F21V7/00 or F21V9/00 using diaphragms containing one or more apertures
- F21V11/12—Screens not covered by groups F21V1/00, F21V3/00, F21V7/00 or F21V9/00 using diaphragms containing one or more apertures of slot type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21V—FUNCTIONAL FEATURES OR DETAILS OF LIGHTING DEVICES OR SYSTEMS THEREOF; STRUCTURAL COMBINATIONS OF LIGHTING DEVICES WITH OTHER ARTICLES, NOT OTHERWISE PROVIDED FOR
- F21V7/00—Reflectors for light sources
- F21V7/005—Reflectors for light sources with an elongated shape to cooperate with linear light sources
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2518—Projection by scanning of the object
- G01B11/2527—Projection by scanning of the object with phase change by in-plane movement of the patern
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—3D [Three Dimensional] image rendering
- G06T15/50—Lighting effects
- G06T15/60—Shadow generation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/306—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/309—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using white LEDs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/365—Correlation of different images or relation of image positions in respect to the body augmented reality, i.e. correlating a live optical image with another image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/372—Details of monitor hardware
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/373—Surgical systems with images on a monitor during operation using light, e.g. by using optical scanners
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/502—Headgear, e.g. helmet, spectacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES F21K, F21L, F21S and F21V, RELATING TO THE FORM OR THE KIND OF THE LIGHT SOURCES OR OF THE COLOUR OF THE LIGHT EMITTED
- F21Y2103/00—Elongate light sources, e.g. fluorescent tubes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2215/00—Indexing scheme for image rendering
- G06T2215/12—Shadow map, environment map
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Chemical & Material Sciences (AREA)
- Materials Engineering (AREA)
- Oral & Maxillofacial Surgery (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Robotics (AREA)
- Computer Graphics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mechanical Engineering (AREA)
- Signal Processing (AREA)
- Gynecology & Obstetrics (AREA)
- Toxicology (AREA)
- Software Systems (AREA)
- Geometry (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Processing Or Creating Images (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Image Processing (AREA)
- Image Generation (AREA)
- Endoscopes (AREA)
Description
本願は、2017年10月6日付けで出願され、全体的に参照により本明細書に援用される米国仮特許出願第62/569,353号の利益を主張する。
該当せず
該当せず
1.発明の分野
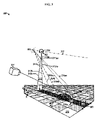
本発明は、スキャンデバイスの技術分野にある。より詳細には、本発明の好ましい実施形態は、一般的には、スキャン中の物体の三次元モデルを生成するスキャンデバイスに関する。より詳細には、本発明の好ましい実施形態は、一般的には、シャドウキャスタを使用して、スキャン中の物体又はエリアの三次元モデルを生成する装置、システム、及び方法に関する。
計算ハードウェア及びソフトウェアの進歩により、物体の形状を三次元空間で伝達する三次元モデル及びデジタル画像の生成が容易になった。従来の計算技法及びデバイスは、スキャン中の物体の表面の三次元モデルを形成する三次元(「3D」)スキャナとして実施される。これらのうち、構造化光スキャナシステムは通常、複雑なパターンの光及び1つ又は複数のカメラシステムを使用して、物体の形状を三次元で表す画像を捕捉する。従来の構造化光スキャナシステムは機能的であるが、これらのシステムは通常、スキャナをコスト的に法外なものにする材料及びリソースを必要とするため、広範囲の用途に適用するにはあまり適してない。例えば、そのようなスキャナは、レーザ及び/又は液晶ディスプレイ(「LCD」)プロジェクタ並びに複雑な光パターン及びそのようなスキャナに関連する撮像技法の処理に必要な他の計算ハードウェア及びアルゴリズムを利用する。
種々の実施形態は、一般的には、物体及び環境の少なくとも三次元モデル又は画像を形成するコンピュータビジョン、グラフィックス、画像スキャン、及び画像処理、並びに関連する機械的、電気的、及び電子的ハードウェア、コンピュータソフトウェア、及びシステム、及び有線及び無線ネットワーク通信に関する。本発明の広義の実施形態は、一般的には、1つ又は複数の光度エッジを生成して、物体又は環境の三次元モデルを形成する装置、方法、及びシステムに関する。広義の実施形態では、本発明は、モデリング中の物体又はエリアにわたる1つ又は複数の光度エッジを生成する1つ又は複数の光源及び1つ又は複数のシャドウキャスタ、1つ又は複数の光度エッジを検出する1つ又は複数の手段、モデリング中の物体又はエリアに相対する1つ又は複数の光度エッジの移動を検出する手段、及びモデリング中の物体又はエリアの三次元モデルを生成する手段、並びに関連する方法及びシステムを含む。幾つかの実施形態は1つ又は複数のシャドウキャスタを移動させ、幾つかの実施形態は1つ又は複数の光源を移動させ、幾つかの実施形態は、1つ又は複数の光度エッジを通して物体を移動させる。これらの実施形態は本発明の範囲及び趣旨の例示であるが、上述した実施形態及び例は本発明を限定すべきではなく、本明細書における特定の実施形態、方法、及び例の変形、組合せ、及び均等物の存在を当業者は理解し認識される。
本発明の例示的な好ましい実施形態を添付図面に示す。
例示のために、本発明は、1つ又は複数の光度エッジを生成して、物体又は環境の三次元モデルを形成する装置、方法、及びシステムの好ましい実施形態において示される。広義の実施形態では、本発明は、モデリング中の物体又はエリアにわたる1つ又は複数の光度エッジを生成する1つ又は複数の光源及び1つ又は複数のシャドウキャスタ、1つ又は複数の光度エッジを検出する1つ又は複数の手段、モデリング中の物体又はエリアに相対する1つ又は複数の光度エッジの移動を検出する手段、及びモデリング中の物体又はエリアの三次元モデルを生成する手段、並びに関連する方法及びシステムを含む。幾つかの実施形態は1つ又は複数のシャドウキャスタを移動させ、幾つかの実施形態は1つ又は複数の光源を移動させ、幾つかの実施形態は、1つ又は複数の光度エッジを通して物体を移動させる。種々の実施形態又は例は、システム、プロセス、方法、装置、ユーザインターフェース、又はコンピュータ可読記憶媒体等のコンピュータ可読媒体若しくはプログラム命令が光学リンク、電子リンク、若しくは無線通信リンクを介して送信されるコンピュータネットワークにおける一連のプログラム命令を含む多くの方法で実施し得る。一般に、開示されるプロセスの動作は、特許請求の範囲において別段のことが提供される場合を除き、任意の順序で実行し得る。これらの実施形態は本発明の範囲の限定を意図しない。
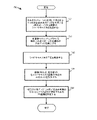
スキャンが収集されていない場合、上述したようにスキャナ位置決めステップ3505を繰り返す。2つのスキャンが収集されている場合、第1基準識別ステップ3581において、第1の表面上の基準を識別する。次に、第2基準識別ステップ3583において、第2の表面上の対応する基準を識別する。次に、計算ステップ3585において、プロセッサを使用して剛性変換を計算する。次に、スキャナ又は患者が移動した場合、マッピングステップ3587において、剛性変換を使用して全ての表面点を新しい位置にマッピングする。最後に、動作継続ステップ3595において、動作を継続する。図36では、ロボットフローチャート3600が、ロボット脳手術中に使用されている外科用シャドウキャスタスキャナ3100の動作を説明する。外科用シャドウキャスタスキャナ3100の手術における最初のステップは、スキャナドレープステップ3603において、手術に適し、外科用シャドウキャスタスキャナ3100の外側に適合し、手術中の汚染から患者3170を保護可能なカスタムドレープをスキャナに掛けることを含む。次に、スキャナ位置決めステップ3605において、外科用シャドウキャスタスキャナ3100は、ロボット制御されるモータを使用して対象物の上に位置決めされる。次に、位置合わせ判断ステップ3610において、スキャナが対象物と位置合わせされたか否かが判断される。スキャナが位置合わせされない場合、スキャナ位置合わせステップ3640においてスキャナは対象物と位置合わせされる。スキャナが位置合わせされると、フォーカス判断ステップ3615において、カメラが対象物にフォーカスされているか否かが判断される。カメラがフォーカスされていない場合、カメラフォーカスステップ3620においてカメラはフォーカスされる。カメラがフォーカスされると、記録開始ステップ3625において、カメラは対象物の録画を開始する。次に、掃引開始ステップ3645において、シャドウキャスタは対象物にわたる光度エッジの掃引を開始する。次に、収集及び解析ステップ3650において、記録されたビデオのフレームがプロセッサにより集められて解析され、点群を作成する。次に、新点群フィルタリングステップ3652において、新しい点群がプロセッサによりフィルタリングされる。次に、フィルタリングされた点群の更新ステップ3654において、フィルタリングされた点群表示が更新される。次に、全体スキャン判断ステップ3667において、関心領域全体がスキャンされたか否かが判断される。関心領域全体がスキャンされていない場合、上述したように収集及び解析ステップ3650を繰り返す。関心領域全体がスキャンされた場合、全体点群フィルタリングステップ3670において、プロセッサは全体点群をフィルタリングする。次に、表面構築ステップ3675において、プロセッサは、フィルタリングされた点群から三次元表面のモデルを構築する。次に、表面送信ステップ3663において、表面は手術ナビゲーションコンピュータに送信される。次に、ファイル保存ステップ3635において、表面はファイルに保存される。次に、画像表示ステップ3655において、モデルはプロセッサによりディスプレイに表示される。別スキャン判断ステップ3630において、別のスキャンが必要であるか否かが判断される。別のスキャンが必要な場合、上述したように位置合わせ判断ステップ3610が繰り返される。別のスキャンが必要ない場合、掃引停止ステップ3660において、シャドウキャスタは対象物にわたる光度エッジの掃引を停止する。次に、記録停止ステップ3665において、カメラは対象物の録画を停止する。次に、スキャナドレープ取り去りステップ3677において、スキャナからドレープが取り去られる。最後に、スキャナ格納ステップ3680において、スキャナは、動作後、格納される。
動式内視鏡シャドウキャスタスキャナ3900のアルゴリズムにおける最初のステップは、プログラム開始ステップ4304において、プログラムを開始することを含む。次に、パラメータ収集ステップ4308において、ユーザ提供又はプログラム指定のスキャン及び解析パラメータが収集される。次に、記録開始ステップ4325において、内視鏡カメラ4030、4030a、又は4030bは録画を開始する。次に、掃引開始ステップ4345において、ステッパモータリニアアクチュエータ3740又は3940が開始されて、内視鏡シャドウキャスタスキャナ3700の光源3701又はスリット移動式内視鏡シャドウキャスタスキャナ3900のスリット3925を移動させ、対象物にわたり光度エッジを掃引する。次に、ビデオ収集ステップ4350において、記録されたビデオのフレームが収集される。次に、バッファ判断ステップ4324において、ビデオバッファが解析するのに十分に埋まったか否かが判断される。バッファが十分に埋まっていない場合、上述したようにビデオ収集ステップ4350が繰り返される。バッファが解析するのに十分に埋まった場合、フレーム解析ステップ4344において、ビデオフレームが解析されて、点群を構築する。次に、なおバッファが十分か判断するステップ4358において、バッファ内になお十分なフレームがあるか否かが判断される。バッファに十分なフレームがない場合、上述したようにバッファ判断ステップ4324が繰り返される。バッファ内になお十分なフレームがある場合、掃引終了判断ステップ4378において、掃引を終了するか否かが判断される。掃引が終了しない場合、上述したようにフレーム解析ステップ4344が繰り返される。掃引が終了する場合、モータ停止ステップ4368において、ステッパモータリニアアクチュエータ3740又は3940が停止する。次に、記録停止ステップ4365において、内視鏡カメラ4030、4030a、又は4030bは対象物の録画を停止する。次に、フレーム解析終了ステップ4364において、フレームの解析が終了する。次に、点群フィルタリングステップ4370において、プロセッサは点群をフィルタリングする。次に、表面構築ステップ4375において、プロセッサは、フィルタリングされた点群から三次元表面のモデルを構築する。次に、ファイル保存ステップ4335において、表面はファイルに保存される。次に、画像表示ステップ4355において、モデルはプロセッサによりディスプレイに表示される。別スキャン判断ステップ4330において、別のスキャンが必要か否かが判断される。別のスキャンが必要な場合、上述したように記録開始ステップ4325が繰り返される。最後に、別のスキャンが必要ない場合、アルゴリズム終了ステップ4390において、ユーザはアルゴリズムを終了する。図44では、内視鏡掃引フローチャート4400は、内視鏡シャドウキャスタスキャナ3700及びスリット移動式内視鏡シャドウキャスタスキャナ3900のシャドウキャスタ掃引を説明する。まず、モータパラメータ設定ステップ4407において、ステッパモータリニアアクチュエータ3740又は3940のパラメータが設定される。次に、掃引開始ステップ4445において、内視鏡シャドウキャスタスキャナ3700の光源3701又はスリット移動式内視鏡シャドウキャスタスキャナ3900のスリット3925を移動させることにより、光源3701は掃引を開始する。次に、現在モータ位置取得ステップ4447において、ステッパモータリニアアクチュエータ3740又は3940の位置が特定される。次に、掃引端部判断ステップ4449において、光源が掃引の端部に達したか否かが判断される。光源が掃引の端部に達していなかった場合、上述したように現在モータ位置取得ステップ4447が繰り返される。光源が掃引の端部に達しており、別のスキャンが必要な場合、アルゴリズムリピートステップ4494において、最初のスキャンとは逆方向でモータパラメータ設定ステップ4407が繰り返される。上記テーパ光ファイバ束4060bを使用するために、基端部テーパ光ファイバ束3720及び3920は、先端テーパ光ファイバ束4060bと同じ形状、例えば、半丸角に先細らなければならない。
関する。
連動することを保証する。次に、記録開始ステップ5825において、カメラドローン5430又は5630は録画を開始する。次に、掃引開始ステップ5845において、シャドウドローン5420又は5620は、対象物にわたり対象物の上方をユニゾンで飛行することにより対象物にわたる光度エッジの掃引を開始する。次に、ビデオ収集ステップ5850において、記録されたビデオのフレームが収集される。次に、バッファ判断ステップ5824において、ビデオバッファが解析するのに十分に埋まったか否かが判断される。バッファが十分に埋まっていない場合、上述したようにビデオ収集ステップ5850が繰り返される。バッファが解析するのに十分に埋まった場合、フレーム解析ステップ5844において、ビデオフレームが解析されて、点群を構築する。次に、なおバッファが十分か判断するステップ5858において、バッファ内になお十分なフレームがあるか否かが判断される。バッファに十分なフレームがない場合、上述したようにバッファ判断ステップ5824が繰り返される。バッファ内になお十分なフレームがある場合、ドローン位置合わせ判断ステップ5810において、ドローンがなお位置合わせているか否かが判断される。ドローンが位置合わせされていない場合、ドローン位置合わせステップ5840において、ドローンは位置合わせされる。ドローンが位置合わせされると、掃引終了判断ステップ5878において、掃引を終了するか否かが判断される。掃引が終了しない場合、上述したようにフレーム解析ステップ5844が繰り返される。掃引が終了する場合、掃引停止ステップ5860において、シャドウドローン5420又は5620は掃引を停止する。次に、記録停止ステップ5865において、カメラドローン5430又は5630は対象物の録画を停止する。次に、フレーム解析終了ステップ5864において、フレームの解析が終了する。次に、点群フィルタリングステップ5870において、プロセッサは点群をフィルタリングする。次に、表面構築ステップ5875において、プロセッサは、フィルタリングされた点群から三次元表現のモデルを構築する。次に、ファイル保存ステップ5835において、表面はファイルに保存される。次に、画像表示ステップ5855において、モデルはプロセッサによりディスプレイに表示される。別スキャン判断ステップ5830において、別のスキャンが必要か否かが判断される。別のスキャンが必要な場合、上述したように連動保証ステップ5811が繰り返される。最後に、別のスキャンが必要ない場合、アルゴリズム終了ステップ5890において、ユーザはアルゴリズムを終了する。図59では、ドローン掃引フローチャート5900は、太陽ドローンシャドウキャスタスキャナシステム5400及びドローンシャドウキャスタスキャナシステム5600により使用されるシャドウキャスタ掃引を説明する。まず、パラメータ設定ステップ5908において、ドローンの移動パラメータが設定される。次に、ドローン位置合わせステップ5911において、ドローンは空中で位置合わせされる。次に、掃引開始ステップ5945において、シャドウドローン5420及び5620は、一定速度で標的エリアの上方をユニゾンで飛行することにより掃引を開始する。次に、現在ドローン位置取得ステップ5927において、ドローンの位置が特定される。次に、ドローン位置合わせずれ判断ステップ5910において、ドローンが位置合わせずれしているか否かが判断される。ドローンが位置合わせずれしている場合、ドローン位置合わせステップ5940において、ドローンは位置合わせされる。ドローンの位置合わせずれが解消されると、掃引端部判断ステップ5978において、シャドウドローン5420又は5620が掃引の端部に達したか否かが判断される。シャドウドローン5420又は5620が掃引の端部に達していなかった場合、上述したように現在ドローン位置取得ステップ5927が繰り返される。シャドウドローン5420又は5620が掃引の端部に達しており、別のスキャンが必要な場合、アルゴリズム繰り返しステップ5997において、ドローンが最初のスキャンとは逆方向で移動した状態でパラメータ設定ステップ5908が繰り返される。
Claims (5)
- 鮮鋭な影を生成する装置であって、
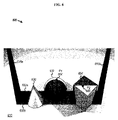
2つのサイドシャドウキャスタであって、前記サイドシャドウキャスタはそれぞれ三角形であり、
基部、
前記基部から延び、一点で交わる2つの辺、及び
2つの前記辺が交わる前記点及び旋回点を有する頂点
を有する、2つのサイドシャドウキャスタと、
メインシャドウキャスタであって、前記メインシャドウキャスタは、前記サイドシャドウキャスタが前記メインシャドウキャスタに従属した状態で前記サイドシャドウキャスタの前記基部間に配置される、メインシャドウキャスタと、
前記サイドシャドウキャスタの前記旋回点と交わる回転軸と、
線形であり、前記サイドシャドウキャスタの前記頂点間に広がり、前記回転軸に沿って配置される光源と、
を含み、
前記サイドシャドウキャスタ及び前記メインシャドウキャスタは、前記回転軸の回りを回転することができ、
前記光源は前記サイドシャドウキャスタ及び前記メインシャドウキャスタにわたり光を投影して、前記鮮鋭な影を生成する、装置。 - 前記サイドシャドウキャスタ及び前記メインシャドウキャスタは、構成可能な形状を更に有する、請求項1に記載の装置。
- 前記サイドシャドウキャスタ及び前記メインシャドウキャスタは、構成可能な不透明度を更に有する、請求項1に記載の装置。
- 前記サイドシャドウキャスタ及び前記メインシャドウキャスタは、カラーフィルタを更に有する、請求項1に記載の装置。
- 前記サイドシャドウキャスタ及び前記メインシャドウキャスタは、複数のセクションを更に有する、請求項1に記載の装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022044549A JP7222133B2 (ja) | 2017-10-06 | 2022-03-18 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762569353P | 2017-10-06 | 2017-10-06 | |
| US62/569,353 | 2017-10-06 | ||
| PCT/US2018/054653 WO2019071157A1 (en) | 2017-10-06 | 2018-10-05 | GENERATING ONE OR MORE BRIGHTNESS EDGES TO FORM THREE-DIMENSIONAL MODELS OF OBJECTS |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022044549A Division JP7222133B2 (ja) | 2017-10-06 | 2022-03-18 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020537210A JP2020537210A (ja) | 2020-12-17 |
| JP2020537210A5 JP2020537210A5 (ja) | 2021-11-11 |
| JP7086330B2 true JP7086330B2 (ja) | 2022-06-20 |
Family
ID=65995266
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020513819A Active JP7086330B2 (ja) | 2017-10-06 | 2018-10-05 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
| JP2022044549A Active JP7222133B2 (ja) | 2017-10-06 | 2022-03-18 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
| JP2023014870A Pending JP2023055873A (ja) | 2017-10-06 | 2023-02-02 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022044549A Active JP7222133B2 (ja) | 2017-10-06 | 2022-03-18 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
| JP2023014870A Pending JP2023055873A (ja) | 2017-10-06 | 2023-02-02 | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 |
Country Status (9)
| Country | Link |
|---|---|
| US (5) | US10724853B2 (ja) |
| EP (2) | EP4268757A3 (ja) |
| JP (3) | JP7086330B2 (ja) |
| CN (11) | CN114777682A (ja) |
| AU (3) | AU2018346758B2 (ja) |
| CA (1) | CA3078488A1 (ja) |
| ES (1) | ES2972214T3 (ja) |
| IL (5) | IL286401B (ja) |
| WO (1) | WO2019071157A1 (ja) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10064552B1 (en) * | 2009-06-04 | 2018-09-04 | Masoud Vaziri | Method and apparatus for a compact and high resolution mind-view communicator |
| US11367164B1 (en) * | 2009-06-04 | 2022-06-21 | Masoud Vaziri | Method and apparatus for super resolution imaging and eye tracking devices |
| WO2019031259A1 (ja) * | 2017-08-08 | 2019-02-14 | ソニー株式会社 | 画像処理装置および方法 |
| JP6953233B2 (ja) | 2017-08-24 | 2021-10-27 | 株式会社トプコン | 3次元測量装置 |
| WO2019045144A1 (ko) * | 2017-08-31 | 2019-03-07 | (주)레벨소프트 | 의료용 항법 장치를 위한 의료 영상 처리 장치 및 의료 영상 처리 방법 |
| CN114777682A (zh) * | 2017-10-06 | 2022-07-22 | 先进扫描仪公司 | 生成一个或多个亮度边缘以形成物体的三维模型 |
| IL258918B (en) * | 2018-04-24 | 2022-08-01 | Korech Omer | Electro-optical means to support effective neural network processing for autonomous vehicles by embedding depth cues in the raw data |
| KR101973513B1 (ko) * | 2018-05-14 | 2019-04-30 | 주식회사 코어라인소프트 | 생체 내 관의 대표값 측정 방법 및 시스템 |
| EP3813636A1 (en) * | 2018-07-24 | 2021-05-05 | Sony Corporation | Distributed image processing system in operating theater |
| US11971960B2 (en) * | 2018-10-23 | 2024-04-30 | The Johns Hopkins University | Deep learning based image enhancement |
| US11257214B2 (en) * | 2018-12-03 | 2022-02-22 | Regents Of The University Of Minnesota | Two-stage variational image segmentation of medical images using fracture mechanics |
| US10957025B2 (en) * | 2018-12-03 | 2021-03-23 | International Business Machines Corporation | Photograph with variable light source distribution |
| US11620794B2 (en) * | 2018-12-14 | 2023-04-04 | Intel Corporation | Determining visually reflective properties of physical surfaces in a mixed reality environment |
| US11100371B2 (en) * | 2019-01-02 | 2021-08-24 | Cognata Ltd. | System and method for generating large simulation data sets for testing an autonomous driver |
| US11361511B2 (en) * | 2019-01-24 | 2022-06-14 | Htc Corporation | Method, mixed reality system and recording medium for detecting real-world light source in mixed reality |
| WO2020242047A1 (en) * | 2019-05-30 | 2020-12-03 | Samsung Electronics Co., Ltd. | Method and apparatus for acquiring virtual object data in augmented reality |
| WO2020262105A1 (ja) * | 2019-06-27 | 2020-12-30 | 株式会社Nttドコモ | 情報処理装置 |
| CN112188181B (zh) * | 2019-07-02 | 2023-07-04 | 中强光电股份有限公司 | 图像显示设备、立体图像处理电路及其同步信号校正方法 |
| US11432882B2 (en) | 2019-09-17 | 2022-09-06 | CAIRA Surgical | System and method for medical object tracking |
| EP3819699B1 (en) | 2019-11-08 | 2024-02-21 | Leica Instruments (Singapore) Pte. Ltd. | Optical system and corresponding apparatus, method and computer program |
| US20220387129A1 (en) * | 2019-11-12 | 2022-12-08 | Pathkeeper Surgical Ltd. | System, method and computer program product for improved mini-surgery use cases |
| CN115428430A (zh) * | 2019-12-09 | 2022-12-02 | 技艺股份有限公司 | 图像处理方法、程序以及图像处理装置 |
| EP3882682A1 (en) | 2020-03-20 | 2021-09-22 | Leica Instruments (Singapore) Pte. Ltd. | Illumination system, system, method and computer program for a microscope system |
| US11790586B2 (en) * | 2020-06-19 | 2023-10-17 | Microsoft Technology Licensing, Llc | Generating physio-realistic avatars for training non-contact models to recover physiological characteristics |
| CN114073548A (zh) * | 2020-08-10 | 2022-02-22 | 巴德阿克塞斯系统股份有限公司 | 用于在混合现实/虚拟现实中生成脉管表示的系统和方法 |
| TWI738538B (zh) * | 2020-10-14 | 2021-09-01 | 中華學校財團法人中華科技大學 | 無人載具之三維影像重組方法及系統 |
| CN112215934B (zh) * | 2020-10-23 | 2023-08-29 | 网易(杭州)网络有限公司 | 游戏模型的渲染方法、装置、存储介质及电子装置 |
| RU2757400C1 (ru) * | 2020-12-08 | 2021-10-15 | Федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский Нижегородский государственный университет им. Н.И. Лобачевского" | Система автоматической дозаправки беспилотного летательного аппарата |
| CN112669386B (zh) * | 2020-12-29 | 2022-09-23 | 北京大学 | 基于三维光学扫描的脑磁图自动化定位配准方法及装置 |
| CN113140010B (zh) * | 2021-05-14 | 2022-08-12 | 上海交通大学 | 适用少/无特征环境的三维重建方法及系统、设备、介质 |
| US20230139704A1 (en) * | 2021-11-04 | 2023-05-04 | Lumicell, Inc. | Optical fiber fixtures for imaging devices |
| US12102481B2 (en) | 2022-06-03 | 2024-10-01 | Bard Access Systems, Inc. | Ultrasound probe with smart accessory |
| JP2024070399A (ja) * | 2022-11-11 | 2024-05-23 | セイコーエプソン株式会社 | 画像処理装置、印刷システムおよび画像処理プログラム |
| CN116793257B (zh) * | 2023-08-28 | 2023-10-27 | 成都量芯集成科技有限公司 | 一种三维测量系统和方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020024593A1 (en) | 1999-12-06 | 2002-02-28 | Jean-Yves Bouguet | 3D scanning using shadows |
| JP2007132715A (ja) | 2005-11-08 | 2007-05-31 | Univ Chuo | 三次元計測方法、計測装置、復元方法および復元装置 |
| JP2009032123A (ja) | 2007-07-27 | 2009-02-12 | Hiroshima Industrial Promotion Organization | 画像処理装置、画像処理方法およびプログラム |
Family Cites Families (145)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3051166A (en) | 1959-12-01 | 1962-08-28 | Avco Corp | Endoscope |
| GB1504537A (en) * | 1975-06-12 | 1978-03-22 | Secretary Industry Brit | Automatic inspection of machined parts |
| US4113389A (en) * | 1976-04-19 | 1978-09-12 | Morton Kaye | Optical measurement system |
| US4160587A (en) * | 1976-10-01 | 1979-07-10 | Bolex International S.A. | Camera equipped with range finder for manual or automatic focusing |
| JPH0638626B2 (ja) * | 1985-12-17 | 1994-05-18 | 工業技術院長 | 光源ユニット |
| DE8711021U1 (de) * | 1987-08-10 | 1987-12-03 | Fa. August Gärtner, 1000 Berlin | Leuchte |
| US4918626A (en) * | 1987-12-09 | 1990-04-17 | Evans & Sutherland Computer Corp. | Computer graphics priority system with antialiasing |
| JP2513862B2 (ja) * | 1988-10-11 | 1996-07-03 | イー・アイ・デュポン・ドウ・ヌムール・アンド・カンパニー | 走査型レ−ザ顕微鏡装置 |
| US4926041A (en) * | 1989-07-20 | 1990-05-15 | Hewlett-Packard Company | Optical scanner |
| US5418608A (en) | 1993-05-04 | 1995-05-23 | Harbor Branch Oceanographic Institution Inc. | Three dimensional mapping systems and methods |
| US5685305A (en) | 1994-08-05 | 1997-11-11 | The United States Of America As Represented By The Department Of Health And Human Services | Method and system for MRI detection of abnormal blood flow |
| GB2292605B (en) | 1994-08-24 | 1998-04-08 | Guy Richard John Fowler | Scanning arrangement and method |
| US5740224A (en) | 1994-09-27 | 1998-04-14 | University Of Delaware | Cone beam synthetic arrays in three-dimensional computerized tomography |
| CA2138629A1 (en) * | 1994-12-20 | 1996-06-21 | Allan Brent York | Lighting structure for intensely illuminating narrow linear region |
| AU7384196A (en) * | 1995-10-04 | 1997-04-28 | Todd-Ao Corporation, The | Projector slit lens assembly adjustment device |
| WO1997018667A1 (fr) * | 1995-11-14 | 1997-05-22 | Sony Corporation | Dispositif pour effets speciaux, procede de traitement d'images et procede de generation d'ombres |
| US6141105A (en) * | 1995-11-17 | 2000-10-31 | Minolta Co., Ltd. | Three-dimensional measuring device and three-dimensional measuring method |
| JP3733625B2 (ja) * | 1995-11-17 | 2006-01-11 | コニカミノルタセンシング株式会社 | 3次元計測のための撮像装置 |
| US5806521A (en) | 1996-03-26 | 1998-09-15 | Sandia Corporation | Composite ultrasound imaging apparatus and method |
| US5947819A (en) * | 1996-05-22 | 1999-09-07 | Konami Co., Ltd. | Object-throwing video game system |
| US5971767A (en) | 1996-09-16 | 1999-10-26 | The Research Foundation Of State University Of New York | System and method for performing a three-dimensional virtual examination |
| US6331116B1 (en) | 1996-09-16 | 2001-12-18 | The Research Foundation Of State University Of New York | System and method for performing a three-dimensional virtual segmentation and examination |
| US6039457A (en) * | 1997-12-17 | 2000-03-21 | Intex Exhibits International, L.L.C. | Light bracket |
| DE69915901T2 (de) * | 1998-01-14 | 2004-09-02 | Canon K.K. | Bildverarbeitungsgerät |
| US6377865B1 (en) | 1998-02-11 | 2002-04-23 | Raindrop Geomagic, Inc. | Methods of generating three-dimensional digital models of objects by wrapping point cloud data points |
| US6224237B1 (en) * | 1998-04-16 | 2001-05-01 | Honeywell International Inc. | Structure for achieving a linear light source geometry |
| US6186649B1 (en) * | 1998-04-16 | 2001-02-13 | Honeywell International Inc. | Linear illumination sources and systems |
| US6023495A (en) | 1998-05-15 | 2000-02-08 | International Business Machines Corporation | System and method for acquiring three-dimensional data subject to practical constraints by integrating CT slice data and CT scout images |
| US6072496A (en) | 1998-06-08 | 2000-06-06 | Microsoft Corporation | Method and system for capturing and representing 3D geometry, color and shading of facial expressions and other animated objects |
| AU4975399A (en) | 1998-07-08 | 2000-02-01 | Lennard H. Bieman | Machine vision and semiconductor handling |
| US6600553B1 (en) | 1998-11-03 | 2003-07-29 | National Institute Of Science And Technology U.S. Dept Of Commerce | Three degree-of-freedom telescoping geometry scanner |
| US6490048B1 (en) * | 1998-11-03 | 2002-12-03 | Cyberoptics Corporation | Tomographic reconstruction of electronic components from shadow image sensor data |
| AU769744B2 (en) * | 1999-03-01 | 2004-02-05 | Probatter Sports, Llc | Pitching system with video display means |
| US6532299B1 (en) | 2000-04-28 | 2003-03-11 | Orametrix, Inc. | System and method for mapping a surface |
| US7234937B2 (en) | 1999-11-30 | 2007-06-26 | Orametrix, Inc. | Unified workstation for virtual craniofacial diagnosis, treatment planning and therapeutics |
| US6600168B1 (en) | 2000-02-03 | 2003-07-29 | Genex Technologies, Inc. | High speed laser three-dimensional imager |
| US6968075B1 (en) | 2000-05-09 | 2005-11-22 | Chang Kurt C | System and method for three-dimensional shape and size measurement |
| US6509559B1 (en) | 2000-06-20 | 2003-01-21 | Ppt Vision, Inc. | Binary optical grating and method for generating a moire pattern for 3D imaging |
| KR100382905B1 (ko) | 2000-10-07 | 2003-05-09 | 주식회사 케이씨아이 | 치아 컴퓨터 모델링용 삼차원 스캐너 시스템 |
| US6592371B2 (en) | 2000-10-25 | 2003-07-15 | Duane Durbin | Method and system for imaging and modeling a three dimensional structure |
| US20020057438A1 (en) | 2000-11-13 | 2002-05-16 | Decker Derek Edward | Method and apparatus for capturing 3D surface and color thereon in real time |
| US6903741B2 (en) * | 2001-12-13 | 2005-06-07 | Crytek Gmbh | Method, computer program product and system for rendering soft shadows in a frame representing a 3D-scene |
| US7738945B2 (en) * | 2002-04-19 | 2010-06-15 | University Of Washington | Method and apparatus for pseudo-projection formation for optical tomography |
| US7257249B2 (en) | 2002-06-12 | 2007-08-14 | Spatial Integrated Systems, Inc. | Discrete linear space sampling method and apparatus for generating digital 3D models |
| US6903738B2 (en) | 2002-06-17 | 2005-06-07 | Mitsubishi Electric Research Laboratories, Inc. | Image-based 3D modeling rendering system |
| US6791542B2 (en) | 2002-06-17 | 2004-09-14 | Mitsubishi Electric Research Laboratories, Inc. | Modeling 3D objects with opacity hulls |
| US6831641B2 (en) | 2002-06-17 | 2004-12-14 | Mitsubishi Electric Research Labs, Inc. | Modeling and rendering of surface reflectance fields of 3D objects |
| US7399220B2 (en) | 2002-08-02 | 2008-07-15 | Kriesel Marshall S | Apparatus and methods for the volumetric and dimensional measurement of livestock |
| GB2392072B (en) * | 2002-08-14 | 2005-10-19 | Autodesk Canada Inc | Generating Image Data |
| US20030137673A1 (en) | 2002-12-13 | 2003-07-24 | Cox Cary B. | Systems, and methods of use, employing distorted patterns to ascertain the shape of a surface, for road or runway profiling, or as input to control pro-active suspension systems |
| US8224064B1 (en) | 2003-05-21 | 2012-07-17 | University Of Kentucky Research Foundation, Inc. | System and method for 3D imaging using structured light illumination |
| US7215810B2 (en) | 2003-07-23 | 2007-05-08 | Orametrix, Inc. | Method for creating single 3D surface model from a point cloud |
| WO2005017450A1 (en) | 2003-08-11 | 2005-02-24 | Multi-Dimension Technology, Llc | Calibration block and calibration system for 3d scanner |
| US7103399B2 (en) | 2003-09-08 | 2006-09-05 | Vanderbilt University | Apparatus and methods of cortical surface registration and deformation tracking for patient-to-image alignment in relation to image-guided surgery |
| CN1601351A (zh) * | 2003-09-25 | 2005-03-30 | 鸿富锦精密工业(深圳)有限公司 | 背光模块及其线性光源和线性光源制造方法 |
| ES2883851T3 (es) * | 2003-11-21 | 2021-12-09 | Visual Physics Llc | Sistema de presentación de imágenes y de seguridad micro-óptico |
| US7746377B2 (en) | 2003-11-28 | 2010-06-29 | Topcon Corporation | Three-dimensional image display apparatus and method |
| US20050134588A1 (en) * | 2003-12-22 | 2005-06-23 | Hybrid Graphics, Ltd. | Method and apparatus for image processing |
| US7643966B2 (en) | 2004-03-10 | 2010-01-05 | Leica Geosystems Ag | Identification of 3D surface points using context-based hypothesis testing |
| US7864419B2 (en) | 2004-06-08 | 2011-01-04 | Ellis Amalgamated LLC | Optical scanning assembly |
| US20060020204A1 (en) | 2004-07-01 | 2006-01-26 | Bracco Imaging, S.P.A. | System and method for three-dimensional space management and visualization of ultrasound data ("SonoDEX") |
| US20060017720A1 (en) | 2004-07-15 | 2006-01-26 | Li You F | System and method for 3D measurement and surface reconstruction |
| US20060023197A1 (en) | 2004-07-27 | 2006-02-02 | Joel Andrew H | Method and system for automated production of autostereoscopic and animated prints and transparencies from digital and non-digital media |
| JP2006105822A (ja) * | 2004-10-06 | 2006-04-20 | Canon Inc | 三次元画像処理システム及び三次元データ処理装置 |
| JP4449723B2 (ja) * | 2004-12-08 | 2010-04-14 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| US7494338B2 (en) | 2005-01-11 | 2009-02-24 | Duane Durbin | 3D dental scanner |
| US7477359B2 (en) | 2005-02-11 | 2009-01-13 | Deltasphere, Inc. | Method and apparatus for making and displaying measurements based upon multiple 3D rangefinder data sets |
| AU2006217569A1 (en) * | 2005-02-23 | 2006-08-31 | Craig Summers | Automatic scene modeling for the 3D camera and 3D video |
| EP1869403B1 (en) | 2005-03-03 | 2017-06-14 | Align Technology, Inc. | System and method for scanning an intraoral cavity |
| WO2007061632A2 (en) | 2005-11-09 | 2007-05-31 | Geometric Informatics, Inc. | Method and apparatus for absolute-coordinate three-dimensional surface imaging |
| AU2006332582A1 (en) * | 2005-12-20 | 2007-07-12 | Mental Images Gmbh | Modeling the three-dimensional shape of an object by shading of a two-dimensional image |
| WO2007100303A1 (en) * | 2006-03-01 | 2007-09-07 | Agency For Science, Technology & Research | A method and system for obtaining multiple views of an object for real-time video output |
| US7814441B2 (en) | 2006-05-09 | 2010-10-12 | Inus Technology, Inc. | System and method for identifying original design intents using 3D scan data |
| JP4031509B1 (ja) * | 2006-09-21 | 2008-01-09 | 株式会社コナミデジタルエンタテインメント | 画像処理装置、画像処理装置の制御方法及びプログラム |
| JP5340952B2 (ja) * | 2006-11-29 | 2013-11-13 | エフ・ポスザツト・ヒユー・エル・エル・シー | 三次元投影ディスプレイ |
| US9633426B2 (en) * | 2014-05-30 | 2017-04-25 | General Electric Company | Remote visual inspection image capture system and method |
| US8218903B2 (en) * | 2007-04-24 | 2012-07-10 | Sony Computer Entertainment Inc. | 3D object scanning using video camera and TV monitor |
| US7817823B1 (en) * | 2007-04-27 | 2010-10-19 | Adobe Systems Incorporated | Calculating shadow from area light sources using a spatially varying blur radius |
| US8189003B2 (en) * | 2007-05-08 | 2012-05-29 | Dreamworks Animation Llc | System and method for rendering computer graphics utilizing a shadow illuminator |
| DE102007030186B4 (de) * | 2007-06-27 | 2009-04-23 | Harald Hofmann | Lineare LED-Lampe und Leuchtensystem mit derselben |
| GB2453163B (en) * | 2007-09-26 | 2011-06-29 | Christopher Douglas Blair | Three-dimensional imaging system |
| WO2009062020A2 (en) | 2007-11-08 | 2009-05-14 | D4D Technologies, Llc | Lighting compensated dynamic texture mapping of 3-d models |
| US20090261706A1 (en) * | 2008-01-28 | 2009-10-22 | Eliot Sorella | LED Replacement Light Tube for Fluorescent Light Fixture |
| WO2009115311A1 (de) * | 2008-03-19 | 2009-09-24 | Thomas Kollewe | Verfahren und vorrichtung zur bestimmung der lage und ausrichtung eines prüflings |
| US9189886B2 (en) | 2008-08-15 | 2015-11-17 | Brown University | Method and apparatus for estimating body shape |
| US8284170B2 (en) * | 2008-09-30 | 2012-10-09 | Apple Inc. | Touch screen device, method, and graphical user interface for moving on-screen objects without using a cursor |
| DE102009000536A1 (de) | 2009-02-02 | 2010-08-05 | Ford Global Technologies, LLC, Dearborn | Modulare Lichtschaltereinheit |
| CH701106B1 (de) * | 2009-05-18 | 2013-08-15 | Skyline Parking Ag | Verfahren und Vorrichtung zum Vermessen der räumlichen Ausdehnung eines Objektes. |
| US9269184B2 (en) * | 2009-05-21 | 2016-02-23 | Sony Computer Entertainment America Llc | Method and apparatus for rendering image based projected shadows with multiple depth aware blurs |
| CA2763826C (en) | 2009-06-17 | 2020-04-07 | 3Shape A/S | Focus scanning apparatus |
| DE102009032262A1 (de) | 2009-07-08 | 2011-01-13 | Steinbichler Optotechnik Gmbh | Verfahren zur Bestimmung der 3D-Koordinaten eines Objekts |
| EP2476945A4 (en) * | 2009-09-11 | 2014-03-19 | Opto Design Inc | SURFACE ILLUMINATION METHOD WITH A POINT LIGHT SOURCE, LINEAR LIGHT SOURCE DEVICE AND SURFACE LIGHTING DEVICE WITH LINEAR LIGHT SOURCE DEVICE |
| US20110309745A1 (en) * | 2010-06-21 | 2011-12-22 | Westermarck Joel C | LED Light Tube and Replacement Method |
| CN102042814B (zh) * | 2010-06-24 | 2012-03-07 | 中国人民解放军国防科学技术大学 | 大型堆场三维形貌的投影辅助摄像测量方法 |
| AT509884B1 (de) * | 2010-07-27 | 2011-12-15 | Alicona Imaging Gmbh | Mikroskopieverfahren und -vorrichtung |
| US9098931B2 (en) | 2010-08-11 | 2015-08-04 | Apple Inc. | Scanning projectors and image capture modules for 3D mapping |
| CN102441581A (zh) * | 2010-09-30 | 2012-05-09 | 邓玥 | 基于机器视觉的型钢断面尺寸在线检测的装置及方法 |
| DE102010049310A1 (de) * | 2010-10-22 | 2012-04-26 | Weber Maschinenbau Gmbh Breidenbach | Abtastvorrichtung und Verfahren zum Ermitteln der Kontur eines Objekts |
| EP2522954A1 (en) * | 2011-05-11 | 2012-11-14 | Leica Geosystems AG | Tiltable rotating construction laser with a grade mechanism and method for determining a position of a grade arm of the grade mechanism |
| JP4979827B1 (ja) * | 2011-05-23 | 2012-07-18 | ポスコ エルイーディ カンパニー リミテッド | 光半導体基盤管型照明装置 |
| US9524552B2 (en) | 2011-08-03 | 2016-12-20 | The Regents Of The University Of California | 2D/3D registration of a digital mouse atlas with X-ray projection images and optical camera photos |
| CN102508574B (zh) * | 2011-11-09 | 2014-06-04 | 清华大学 | 基于投影屏幕的多点触控检测方法及多点触控系统 |
| US9070019B2 (en) * | 2012-01-17 | 2015-06-30 | Leap Motion, Inc. | Systems and methods for capturing motion in three-dimensional space |
| US9438813B2 (en) * | 2012-03-13 | 2016-09-06 | Dolby Laboratories Licensing Corporation | Lighting system and method for image and object enhancement |
| KR101154487B1 (ko) * | 2012-03-22 | 2012-06-13 | (주)아이씨티시스템 | 형광 램프 타입의 led 광원 장치 |
| FR2988891A1 (fr) * | 2012-03-29 | 2013-10-04 | Thomson Licensing | Procede d'estimation de niveau d'opacite dans une scene et dispositif correspondant |
| JP5979363B2 (ja) * | 2012-08-20 | 2016-08-24 | パナソニックIpマネジメント株式会社 | 照明器具 |
| US9600927B1 (en) * | 2012-10-21 | 2017-03-21 | Google Inc. | Systems and methods for capturing aspects of objects using images and shadowing |
| EP2912405B1 (en) * | 2012-10-29 | 2017-10-18 | 7D Surgical Inc. | Integrated illumination and optical surface topology detection system and methods of use thereof |
| JP6091866B2 (ja) * | 2012-11-30 | 2017-03-08 | 株式会社キーエンス | 計測顕微鏡装置、画像生成方法及び計測顕微鏡装置操作プログラム並びにコンピュータで読み取り可能な記録媒体 |
| DE102012112321B4 (de) * | 2012-12-14 | 2015-03-05 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung |
| US9411079B1 (en) * | 2012-12-21 | 2016-08-09 | Vode Lighting Llc | System to allocate luminance |
| US8939074B2 (en) * | 2013-03-12 | 2015-01-27 | Illinois Tool Works Inc. | Color-based linear three dimensional acquisition system and method |
| US8872818B2 (en) | 2013-03-15 | 2014-10-28 | State Farm Mutual Automobile Insurance Company | Methods and systems for capturing the condition of a physical structure |
| US9364995B2 (en) | 2013-03-15 | 2016-06-14 | Matterrise, Inc. | Three-dimensional printing and scanning system and method |
| US10228452B2 (en) | 2013-06-07 | 2019-03-12 | Hand Held Products, Inc. | Method of error correction for 3D imaging device |
| KR102095219B1 (ko) * | 2013-07-29 | 2020-04-01 | 엘지이노텍 주식회사 | 조명 장치 |
| US9855698B2 (en) * | 2013-08-07 | 2018-01-02 | Massachusetts Institute Of Technology | Automatic process control of additive manufacturing device |
| CN104424662B (zh) * | 2013-08-23 | 2017-07-28 | 三纬国际立体列印科技股份有限公司 | 立体扫描装置 |
| CN103824282B (zh) * | 2013-12-11 | 2017-08-08 | 香港应用科技研究院有限公司 | 使用表面映射图、物体阴影和一个相机的触摸及运动检测 |
| EP3097748A1 (en) * | 2014-01-22 | 2016-11-30 | iLumisys, Inc. | Led-based light with addressed leds |
| US10161593B2 (en) * | 2014-02-25 | 2018-12-25 | 3M Innovative Properties Company | Solid state lighting device with virtual filament(s) |
| US9754398B1 (en) * | 2014-03-24 | 2017-09-05 | Amazon Technologies, Inc. | Animation curve reduction for mobile application user interface objects |
| US9576393B1 (en) * | 2014-06-18 | 2017-02-21 | Amazon Technologies, Inc. | Dynamic rendering of soft shadows for interface elements |
| CN104165600B (zh) * | 2014-07-03 | 2016-10-05 | 杭州鼎热科技有限公司 | 一种无线手持3d激光扫描系统 |
| CN104102835B (zh) * | 2014-07-11 | 2017-04-12 | 大连理工大学 | 一种基于实时视频图像的投掷训练成绩检测方法 |
| CN104091366B (zh) * | 2014-07-17 | 2017-02-15 | 北京毛豆科技有限公司 | 基于二维阴影信息的三维模型智能数字化生成方法和系统 |
| US9582924B2 (en) | 2014-08-11 | 2017-02-28 | Intel Corporation | Facilitating dynamic real-time volumetric rendering in graphics images on computing devices |
| US10080004B2 (en) * | 2014-11-06 | 2018-09-18 | Disney Enterprises, Inc. | Method and system for projector calibration |
| WO2016085717A1 (en) * | 2014-11-26 | 2016-06-02 | Irobot Corporation | Systems and methods for performing simultaneous localization and mapping using machine vision systems |
| EP3054311B1 (en) * | 2015-01-15 | 2023-01-11 | Atracsys Sàrl | Positioning system and method |
| US10136970B2 (en) | 2015-01-18 | 2018-11-27 | Dentlytec G.P.L.Ltd | System, device, and method for dental intraoral scanning |
| CN104677308B (zh) * | 2015-01-30 | 2017-08-29 | 宋展 | 一种高频二值条纹的三维扫描方法 |
| CN104634276B (zh) * | 2015-02-12 | 2018-08-07 | 上海图漾信息科技有限公司 | 三维测量系统、拍摄设备和方法、深度计算方法和设备 |
| US20160324580A1 (en) * | 2015-03-23 | 2016-11-10 | Justin Esterberg | Systems and methods for assisted surgical navigation |
| US9854155B1 (en) | 2015-06-16 | 2017-12-26 | Amazon Technologies, Inc. | Determining camera auto-focus settings |
| KR102336712B1 (ko) * | 2015-07-08 | 2021-12-10 | 삼성디스플레이 주식회사 | 백라이트 유닛 및 이를 포함하는 표시장치 |
| JP6581839B2 (ja) * | 2015-08-11 | 2019-09-25 | 株式会社 ジツタ | 構造物の状態検査方法 |
| US9989357B2 (en) * | 2015-09-09 | 2018-06-05 | Faro Technologies, Inc. | Aerial device that cooperates with an external projector to measure three-dimensional coordinates |
| WO2017214735A1 (en) * | 2016-06-17 | 2017-12-21 | 7D Surgical Inc. | Systems and methods for obtaining a structured light reconstruction of a 3d surface |
| US9639960B1 (en) * | 2016-11-04 | 2017-05-02 | Loveland Innovations, LLC | Systems and methods for UAV property assessment, data capture and reporting |
| EP3545675A4 (en) * | 2016-11-24 | 2020-07-01 | The University of Washington | CAPTURE AND RESTITUTION OF LIGHT FIELD FOR HEADSETS |
| US10262453B2 (en) * | 2017-03-24 | 2019-04-16 | Siemens Healthcare Gmbh | Virtual shadows for enhanced depth perception |
| CN107167093B (zh) * | 2017-05-25 | 2019-09-20 | 西安知象光电科技有限公司 | 一种激光线扫描与阴影莫尔的复合式测量系统及测量方法 |
| CN114777682A (zh) * | 2017-10-06 | 2022-07-22 | 先进扫描仪公司 | 生成一个或多个亮度边缘以形成物体的三维模型 |
-
2018
- 2018-10-05 CN CN202210316793.2A patent/CN114777682A/zh active Pending
- 2018-10-05 CN CN202210314529.5A patent/CN114777679A/zh active Pending
- 2018-10-05 CN CN202210316812.1A patent/CN114777684A/zh active Pending
- 2018-10-05 CN CN202210316813.6A patent/CN114777685A/zh active Pending
- 2018-10-05 WO PCT/US2018/054653 patent/WO2019071157A1/en active Application Filing
- 2018-10-05 EP EP23193162.7A patent/EP4268757A3/en active Pending
- 2018-10-05 ES ES18864936T patent/ES2972214T3/es active Active
- 2018-10-05 IL IL286401A patent/IL286401B/en unknown
- 2018-10-05 CN CN202210316828.2A patent/CN114777686A/zh active Pending
- 2018-10-05 CN CN201880063651.1A patent/CN111164375B/zh active Active
- 2018-10-05 IL IL302763A patent/IL302763B2/en unknown
- 2018-10-05 CN CN202210314565.1A patent/CN114777681A/zh active Pending
- 2018-10-05 CN CN202210316802.8A patent/CN114777683A/zh active Pending
- 2018-10-05 US US16/496,338 patent/US10724853B2/en active Active
- 2018-10-05 JP JP2020513819A patent/JP7086330B2/ja active Active
- 2018-10-05 IL IL294778A patent/IL294778B2/en unknown
- 2018-10-05 EP EP18864936.2A patent/EP3692329B1/en active Active
- 2018-10-05 AU AU2018346758A patent/AU2018346758B2/en active Active
- 2018-10-05 CN CN202210314524.2A patent/CN114777678B/zh active Active
- 2018-10-05 CN CN202210316783.9A patent/CN114838675A/zh active Pending
- 2018-10-05 CA CA3078488A patent/CA3078488A1/en active Pending
- 2018-10-05 IL IL310846A patent/IL310846A/en unknown
- 2018-10-05 CN CN202210314530.8A patent/CN114777680A/zh active Pending
-
2020
- 2020-03-29 IL IL273682A patent/IL273682B/en unknown
- 2020-06-19 US US16/906,675 patent/US10890439B2/en active Active
- 2020-12-01 US US17/108,527 patent/US11852461B2/en active Active
-
2022
- 2022-03-18 JP JP2022044549A patent/JP7222133B2/ja active Active
-
2023
- 2023-01-25 AU AU2023200401A patent/AU2023200401B2/en active Active
- 2023-02-02 JP JP2023014870A patent/JP2023055873A/ja active Pending
- 2023-11-09 US US18/505,973 patent/US20240102795A1/en active Pending
- 2023-11-09 US US18/505,878 patent/US20240110781A1/en active Pending
-
2024
- 2024-02-16 AU AU2024201040A patent/AU2024201040A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020024593A1 (en) | 1999-12-06 | 2002-02-28 | Jean-Yves Bouguet | 3D scanning using shadows |
| JP2007132715A (ja) | 2005-11-08 | 2007-05-31 | Univ Chuo | 三次元計測方法、計測装置、復元方法および復元装置 |
| JP2009032123A (ja) | 2007-07-27 | 2009-02-12 | Hiroshima Industrial Promotion Organization | 画像処理装置、画像処理方法およびプログラム |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7086330B2 (ja) | 物体の三次元モデルを形成するための1つ又は複数の光度エッジの生成 | |
| EP3073894B1 (en) | Corrected 3d imaging | |
| JP2020518349A (ja) | 光学イメージングにおいての測距 | |
| JP2018514748A (ja) | 光学撮像システムおよびその方法 | |
| EP4312711A1 (en) | An image capture device, an endoscope system, an image capture method and a computer program product |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A525 Effective date: 20200501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211001 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211001 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20211001 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220221 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20220318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220426 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7086330 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |