JP7068552B2 - 摩耗監視装置およびボールねじ - Google Patents
摩耗監視装置およびボールねじ Download PDFInfo
- Publication number
- JP7068552B2 JP7068552B2 JP2021520458A JP2021520458A JP7068552B2 JP 7068552 B2 JP7068552 B2 JP 7068552B2 JP 2021520458 A JP2021520458 A JP 2021520458A JP 2021520458 A JP2021520458 A JP 2021520458A JP 7068552 B2 JP7068552 B2 JP 7068552B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- rolling element
- monitoring device
- field sensor
- diameter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012806 monitoring device Methods 0.000 title claims description 41
- 230000005291 magnetic effect Effects 0.000 claims description 212
- 238000005096 rolling process Methods 0.000 claims description 163
- 238000005259 measurement Methods 0.000 claims description 65
- 230000004907 flux Effects 0.000 claims description 43
- 230000008859 change Effects 0.000 claims description 30
- 230000005294 ferromagnetic effect Effects 0.000 claims description 21
- 238000011156 evaluation Methods 0.000 claims description 15
- 238000012544 monitoring process Methods 0.000 claims description 11
- 230000005484 gravity Effects 0.000 claims description 10
- 230000000737 periodic effect Effects 0.000 claims description 6
- 239000000463 material Substances 0.000 claims description 4
- 230000007423 decrease Effects 0.000 description 9
- 230000000694 effects Effects 0.000 description 7
- 230000010363 phase shift Effects 0.000 description 7
- 238000006073 displacement reaction Methods 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000003302 ferromagnetic material Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/12—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring diameters
- G01B7/125—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring diameters of objects while moving
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/01—Monitoring wear or stress of gearing elements, e.g. for triggering maintenance
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/22—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members
- F16H25/2204—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members with balls
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission Devices (AREA)
Description
様々な機械的用途では、機械要素、例えば軸受け、ガイドウェイ、歯車または駆動装置が使用され、この場合、転動要素により、機械要素の様々な構成要素間の摩擦が減少し、機械要素の様々な構成要素の互いに対する動きが極端に容易になる。使用される転動要素は、例えば、ボール、ローラー、球状ローラー、針、錐体、または他の回転要素であってよく、例えば、鋼、セラミックまたは特殊な超硬質プラスチックから製造することができる。このような機械要素のいくつかの態様では、個々の転動要素を互いに分離する転動要素ケージが提供される。
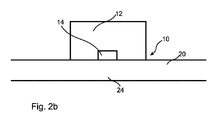
図1は、二つの図1aおよび図1bにおいて、機械要素のガイドチャネル20、例えば、ボールねじまたはリニア軸受の戻りチャネル上に配置された摩耗監視装置10の例を示す。ガイドチャネル20には、循環方向Uに移動する複数の転動要素22が保持されており、ガイドチャネル20の断面は転動要素22の直径より僅かに大きいので、転動要素22に対して一種の強制案内を達成する。転動要素22は、例えば、球であるが、機械要素の設計に応じて、任意の他の回転固体によって形成することもできる。
12 磁石
14 磁場センサ配置
16 第1の磁場センサ
16a、16b 第1の磁場センサのハーフブリッジ
18 第2の磁場センサ
18a、18b 第2の磁場センサのハーフブリッジ
20 ガイドチャネル
22 転動要素
24 走査壁
26 凹部
28 磁気抵抗ブリッジ抵抗器
P 位相差
S1、S2 測定曲線
U 循環方向
Claims (15)
- ボールねじまたはリニア軸受類の連続した強磁性転動要素(22)を有する機械要素の前記強磁性転動要素(22)の摩耗監視のために使用される摩耗監視装置(10)であって、
測定磁場を生成する少なくとも一つの磁石(12)と、
前記測定磁場の磁束密度を測定する磁場センサ配置(14)であって、前記磁場センサ配置(14)は、第1の測定位置で前記磁束密度を測定する少なくとも一つの第1の磁場センサ(16)と、第1の測定位置から離れた第2の測定位置で磁束密度を測定する第2の磁場センサ(18)とを有し、前記測定位置は、前記機械要素が循環方向Uに動作中に循環する前記強磁性転動要素(22)が前記測定位置を互いに近接して通過し、かつそれにより生じる前記測定磁場の変化は前記各磁場センサ(16、18)により前記測定位置のうちの一つにおいて検出可能であるように選択されているものと、
前記磁場センサ配置(14)に接続され、前記磁場センサ(16、18)によって測定した前記磁束密度を記録および評価する評価部であって、前記評価部は、前記磁場センサ(16、18)によって測定した前記磁束密度の比較に基づいて、前記強磁性転動要素(22)の直径および/または前記直径の変化を決定するように構成されているものと、を備え、
前記評価部は、前記磁場センサ(16、18)によって測定した磁束密度の周期的時間経路を記録および評価するように構成され、
前記磁場センサ(16、18)によって測定した磁束密度の前記比較は、前記磁場センサ(16、18)によって測定した前記磁束密度の前記周期的時間経路間の位相差の決定を含むことを特徴とする摩耗監視装置(10)。 - 前記強磁性転動要素(22)の前記直径の変化の前記決定は、前記強磁性転動要素(22)の重心間の距離の決定を含むことを特徴とする、請求項1に記載の摩耗監視装置(10)。
- 前記強磁性転動要素(22)の前記直径の変化の前記決定は、前記強磁性転動要素(22)の少なくとも一部にわたる前記距離の平均値の決定を含むことを特徴とする、請求項2に記載の摩耗監視装置(10)。
- 前記測定位置間の距離は、前記強磁性転動要素(22)の公称直径よりも小さいことを特徴とする、請求項1~3のいずれか1項に記載の摩耗監視装置(10)。
- 前記測定位置間の距離は、前記公称直径の半分より小さい、または前記公称直径の四分の一に等しいことを特徴とする、請求項4に記載の摩耗監視装置(10)。
- 第1の磁場センサ(16)および第2の磁場センサ(18)は、それぞれが二つのハーフブリッジ(16a、16b、18a、18b)を有する一つの測定ブリッジを備え、前記二つの磁場センサ(16、18)の前記ハーフブリッジ(16a、16b、18a、18b)は、循環方向Uに互いに入れ子状に、オフセットをもって配置され、各ハーフブリッジ(16a、16b、18a、18b)の磁気抵抗ブリッジ抵抗器(28)は、前記循環方向Uに互いに離間して配置されることを特徴とする、請求項1~5のいずれか1項に記載の摩耗監視装置(10)。
- 隣接するハーフブリッジ(16a、18a、18b、18b)間の距離は、強磁性転動要素(22)の前記直径のほぼ四分の一に対応し、磁場センサ(16、18)の各ハーフブリッジ(16a、16b、18a、18b)の二つの磁気抵抗ブリッジ抵抗器(28)間の距離は、強磁性転動要素(22)の前記直径の約半分に対応する、請求項6に記載の摩耗監視装置。
- 前記磁石(12)は、永久磁石として設計され、その磁場は前記測定位置を覆うことを特徴とする、請求項1~7のいずれか1項に記載の摩耗監視装置(10)。
- 前記強磁性転動要素(22)のガイドチャネル(20)を含み、前記磁場センサ配置(14)および前記磁石(12)は、前記ガイドチャネル(20)の走査壁(24)上に配置されることを特徴とする、請求項1~8のいずれか1項に記載の摩耗監視装置(10)。
- 前記磁石(12)の磁場出口面が、前記循環方向Uにおける前記走査壁(24)の長手方向の範囲に対して平行または垂直であることを特徴とする、請求項9に記載の摩耗監視装置(10)。
- 前記測定磁場の前記磁束密度、ならびに/または前記走査壁(24)の材料および/もしくは厚さは、前記測定磁場によって検出された強磁性転動要素(22)が、前記測定磁場によって引き付けられ、それによって、検出された強磁性転動要素(22)が互いに引き付け合うように、選択されることを特徴とする、請求項9または10に記載の摩耗監視装置(10)。
- 前記磁場センサ配置(14)は、AMR、CMR、TMRもしくはGMR磁場センサ(16、18)、またはホールセンサを含むことを特徴とする、請求項1~11のいずれか1項に記載の摩耗監視装置(10)。
- 前記評価部は、前記強磁性転動要素(22)の前記決定された直径が所定のしきい値を下回る場合に警告信号を出すように構成されることを特徴とする、請求項1~12のいずれか1項に記載の摩耗監視装置(10)。
- 前記ボールねじの速度を決定する速度センサ、または前記リニア軸受の移動速度を決定する位置もしくは速度センサを含み、前記評価部は、前記強磁性転動要素(22)の前記直径および/もしくは前記直径の変化を決定するための前記ボールねじまたは前記リニア軸受の幾何学的パラメータ、および前記速度もしくは移動速度を組み込むことを特徴とする、請求項1~13のいずれか1項に記載の摩耗監視装置(10)。
- ボールねじのボール戻しチャネルに配置される、請求項1~14のいずれか1項に記載の摩耗監視装置(10)を備えたボールねじ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018115847.5 | 2018-06-29 | ||
| DE102018115847.5A DE102018115847A1 (de) | 2018-06-29 | 2018-06-29 | Verschleißüberwachungsvorrichtung und Kugelgewindetrieb |
| PCT/EP2019/066204 WO2020002092A1 (de) | 2018-06-29 | 2019-06-19 | VERSCHLEIßÜBERWACHUNGSVORRICHTUNG UND KUGELGEWINDETRIEB |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021528666A JP2021528666A (ja) | 2021-10-21 |
| JP7068552B2 true JP7068552B2 (ja) | 2022-05-16 |
Family
ID=67001791
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021520458A Active JP7068552B2 (ja) | 2018-06-29 | 2019-06-19 | 摩耗監視装置およびボールねじ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11846347B2 (ja) |
| EP (1) | EP3814717B1 (ja) |
| JP (1) | JP7068552B2 (ja) |
| CN (1) | CN112352136B (ja) |
| DE (1) | DE102018115847A1 (ja) |
| WO (1) | WO2020002092A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11821810B2 (en) * | 2019-06-17 | 2023-11-21 | Nsk Ltd. | Rolling machine element fatigue diagnosis method and rolling machine element fatigue diagnosis system |
| CN114858047A (zh) * | 2022-06-16 | 2022-08-05 | 水利部水工金属结构质量检验测试中心 | 一种非接触式螺杆启闭机行程和磨损量实时监测装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000346605A (ja) | 1999-04-02 | 2000-12-15 | Murata Mfg Co Ltd | 磁気センサ装置 |
| WO2007113939A1 (ja) | 2006-04-06 | 2007-10-11 | Panasonic Corporation | 磁気検出回路とこれを用いた磁気センサおよびこれらを用いた磁性体球の位置検出装置と縦横検知センサ |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3883796A (en) * | 1972-09-05 | 1975-05-13 | Acme Cleveland Corp | Proximity probe with output proportional to target distance |
| AU497248B2 (en) * | 1975-08-05 | 1978-12-07 | Newall Engineering Co. Ltd., The | Position detector |
| GB1513567A (en) * | 1975-08-05 | 1978-06-07 | Newell Eng Co Ltd | Position detectors |
| DE3721127A1 (de) * | 1987-06-26 | 1989-01-26 | Tiefenbach Gmbh | Radsensor |
| JPH053921Y2 (ja) * | 1989-02-09 | 1993-01-29 | ||
| GB2250097A (en) * | 1990-11-07 | 1992-05-27 | Anglo Amer Corp South Africa | Testing wire rope for cross section variations and other flaws |
| WO2006107938A2 (en) * | 2005-04-04 | 2006-10-12 | Danaher Motion, L.L.C. | Linear motion assembly with monitoring system and method of monitoring |
| US8229682B2 (en) * | 2009-08-17 | 2012-07-24 | General Electric Company | Apparatus and method for bearing condition monitoring |
| DE102010017113B4 (de) * | 2010-05-27 | 2013-07-18 | Hiwin Technologies Corp. | Getriebe mit einer Sensoreinrichtung |
| KR101522487B1 (ko) * | 2011-04-12 | 2015-05-21 | 혼다 기켄 고교 가부시키가이샤 | 비파괴 검사 장치 |
| US9726518B2 (en) * | 2012-07-13 | 2017-08-08 | Qualcomm Incorporated | Systems, methods, and apparatus for detection of metal objects in a predetermined space |
| DE112013007431T5 (de) * | 2013-09-13 | 2016-08-04 | Aktiebolaget Skf | Vorrichtung, Verfahren & Rechnerprogrammprodukt |
| WO2016096418A1 (en) * | 2014-12-16 | 2016-06-23 | Aktiebolaget Skf | Load determining system for a rolling element bearing |
-
2018
- 2018-06-29 DE DE102018115847.5A patent/DE102018115847A1/de not_active Ceased
-
2019
- 2019-06-19 EP EP19732609.3A patent/EP3814717B1/de active Active
- 2019-06-19 US US17/255,154 patent/US11846347B2/en active Active
- 2019-06-19 JP JP2021520458A patent/JP7068552B2/ja active Active
- 2019-06-19 WO PCT/EP2019/066204 patent/WO2020002092A1/de not_active Ceased
- 2019-06-19 CN CN201980044055.3A patent/CN112352136B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000346605A (ja) | 1999-04-02 | 2000-12-15 | Murata Mfg Co Ltd | 磁気センサ装置 |
| WO2007113939A1 (ja) | 2006-04-06 | 2007-10-11 | Panasonic Corporation | 磁気検出回路とこれを用いた磁気センサおよびこれらを用いた磁性体球の位置検出装置と縦横検知センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018115847A1 (de) | 2020-01-02 |
| JP2021528666A (ja) | 2021-10-21 |
| US11846347B2 (en) | 2023-12-19 |
| EP3814717A1 (de) | 2021-05-05 |
| EP3814717B1 (de) | 2022-07-06 |
| CN112352136B (zh) | 2022-06-07 |
| WO2020002092A1 (de) | 2020-01-02 |
| US20210270357A1 (en) | 2021-09-02 |
| CN112352136A (zh) | 2021-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110114636B (zh) | 位移传感器 | |
| CN103217179B (zh) | 用于测量旋转的可移动部件的轴向移动的方法 | |
| US20180364066A1 (en) | Linear position magnetic field sensor with differential sensing and a differential magnetic field sensing method | |
| CN101680777B (zh) | 磁场传感器 | |
| CN102197234B (zh) | 齿轮变速器的包括操作元件的装置 | |
| US20050127901A1 (en) | Hall effect position sensor | |
| JP7068552B2 (ja) | 摩耗監視装置およびボールねじ | |
| KR20100027051A (ko) | 회전 운동 가능한 부품의 축방향 운동 측정을 위한 시스템 및 방법 | |
| JP6449819B2 (ja) | 変位検出装置及び無段変速装置 | |
| JP5857470B2 (ja) | センサ付き転がり軸受装置 | |
| KR20100027035A (ko) | 자기 인코딩 장치 | |
| US20110121823A1 (en) | Meshing encoder gear and sensor assembly | |
| WO2017056854A1 (ja) | 変位検出装置及び無段変速装置 | |
| JP4973869B2 (ja) | 移動体検出装置 | |
| US20190063955A1 (en) | Magnet arrangement for rotational angle detection | |
| TWI434025B (zh) | Non - contact sensing device | |
| JP2011133477A (ja) | 長さ測定装置 | |
| CN100504306C (zh) | 用于角度测量的amr传感器元件 | |
| JP5348009B2 (ja) | 角度センサ | |
| KR20080027350A (ko) | 센서 시스템, 센서, 센서 시스템의 사용 및 물체의 위치또는 회전 속도 결정 방법 | |
| JP2005189097A (ja) | 位置検出装置 | |
| JP2007516437A (ja) | マグネットセンサ装置 | |
| JP5170044B2 (ja) | 永久磁石エンコーダの検査方法及び検査装置 | |
| JP4775705B2 (ja) | 磁気式アブソリュートエンコーダー | |
| JP2006010366A (ja) | 回転検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20201223 |
|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20201223 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201223 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20201223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220419 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7068552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |