以下、本開示の複数の実施形態を図面に基づいて説明する。尚、各実施形態において対応する構成要素には同一の符号を付すことにより、重複する説明を省略する場合がある。各実施形態において構成の一部分のみを説明している場合、当該構成の他の部分については、先行して説明した他の実施形態の構成を適用することができる。また、各実施形態の説明において明示している構成の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても複数の実施形態の構成同士を部分的に組み合わせることができる。そして、複数の実施形態及び変形例に記述された構成同士の明示されていない組み合わせも、以下の説明によって開示されているものとする。
(第一実施形態)
図1に示す本開示の第一実施形態による表示制御装置の機能は、ヘッドアップディスプレイ(以下、「HUD」)100に実装されている。HUD100は、描画ECU(Electronic Control Unit)30等と共に、車両Aにおいて用いられる虚像表示システム10を構成している。
虚像表示システム10は、車両Aの前景に重畳される虚像Viを用いた表示により、車両Aに関連する種々の情報を運転者に提示する。虚像表示システム10は、図1及び図2に示すように、ウィンドシールドWSに規定された投影領域PAへの光の投影により、複数の表示物を含む虚像Viを、運転者から視認可能に表示する。虚像Viには、AR(Augmented Reality)表示物11及び非AR表示物12が含まれ得る。
AR表示物11は、拡張現実表示に用いられる虚像Viである。虚像Viとして表示された状態でのAR表示物11の表示位置は、投影領域PAを通して視認される前景中にある特定物体、例えば、前走車、歩行者及び路面等の重畳対象に関連付けられている。AR表示物11は、こうした重畳対象に相対固定されているように、重畳対象を追って、運転者の見た目上で移動可能である。このように、運転者のアイポイントと、前景中の重畳対象と、投影領域PA中の投影位置との位置関係が決まっているため、車両Aの姿勢が変化した場合でも、AR表示物11が重畳対象に重畳表示された状態は、維持される(図3参照)。換言すれば、AR表示物11の表示位置は、HUD100の画角内で随時移動している。一例として、走行すべき車線の範囲を示す虚像Viが、前景中における左右の区画線の間の路面上に、運転者から見て奥行き方向に延びる態様で、AR表示物11として重畳表示される。
非AR表示物12は、特定の重畳対象には重畳されず、単に前景に重畳表示される。非AR表示物12は、運転者からの見た目上にて、AR表示物11の下側に表示される。非AR表示物12は、主に車両Aの状態を通知する表示物であり、車両Aの構成であるウィンドシールドWS等に相対固定されているように表示される。即ち、非AR表示物12の表示位置は、HUD100の画角内で実質的に移動しない。そのため、車両Aの姿勢が変化した場合には、非AR表示物12と運転者からの視認される前景との位置関係は、変化する(図3参照)。
非AR表示物12を用いた表示には、車両Aが走行可能な状態において常に表示される常時表示と、車両Aに関連した特定の状況下においてのみ表示されるイベント表示とが含まれる。一例として、車両Aの走行速度を示すスピード表示は、常時表示に相当する。一方、ACC(Adaptive Cruise Control)及びLTC(Lane Trace Control)のような運転支援機能等の作動状態を示すインジケータ表示は、イベント表示に相当する。
図1に示す虚像表示システム10は、車両Aに生じた姿勢変化に起因し、重畳対象、投影領域PA、及び運転者のアイポイントの相対的な位置関係が変化した場合でも、重畳対象に重畳したAR表示物11の表示状態を維持させるための制御を行う。詳記すると、ピッチ、ロール及びヒーブ等の姿勢変化が車両Aに生じた場合、虚像Viとして結像される光(以下、「虚像光Lvi」)の態様を変化させないと、運転者からの見た目上にて、AR表示物11は、重畳対象に対してずれた表示となってしまう。そのため虚像表示システム10は、車両Aの姿勢変化に応じて、AR表示物11の重畳対象に対する表示ずれが低減されるように、投影領域PAを通して見える重畳対象の状態に合わせて、虚像光Lviの形状を逐次補正する。
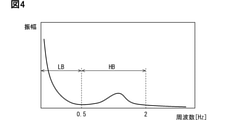
ここで、図4に示すように、車両Aの姿勢変化の振動は、一定の周波数で生じるわけではなく、例えば主に2Hz程度までの周波数帯域の成分を含んだ振動となっている。虚像表示システム10では、0から0.5Hz程度までの周波数帯域が、低周波数帯域LBとされており、低周波数帯域LBよりも周波数の高い0.5~2Hzまでの周波数帯域が、高周波数帯域HBとされている。一例として、車両Aをゆっくりと加減速させる場合等には、低周波数帯域LBの振動が発生する。一方、ブレーキ操作を複数回入力した場合、車両Aを急発進又は急減速させる場合、及び悪路走行中等では、高周波数帯域HBの振動が発生する。
図1に示す虚像表示システム10では、低周波数帯域LBの姿勢変化による虚像Viの表示ずれを低減する機能が描画ECU30によって実現されている。一方、高周波数帯域HBの姿勢変化による虚像Viの表示ずれを低減する機能は、HUD100によって実現されている。以下、描画ECU30及びHUD100の詳細を、図1及び図5に基づき説明する。
描画ECU30は、HUD100を含む複数の車載表示器と接続されており、各車載表示器の表示を統合的に制御する機能を有している。描画ECU30は、各車載表示器の表示内容を決定し、各車載表示器へ向けて映像信号を逐次出力する。HUD100に出力される映像信号も、描画ECU30によって生成される。
描画ECU30は、映像信号の生成に必要なデータを取得するため、車載ネットワークの通信バス29を介して、他の車載構成と相互に通信可能である。通信バス29には、外界センサ21、ロケータ22、3次元地図データベース23、ハイトセンサ24、車両制御ECU26等が直接的又は間接的に電気接続されている。
外界センサ21は、歩行者及び他の車両等の移動物体、さらに路上の縁石、道路標識、道路標示、及び区画線等の静止物体を検出する。これら移動物体及び静止物体の少なくとも一部が、AR表示物11を重畳される重畳対象とされる。車両Aには、例えばカメラユニット、ライダ及びミリ波レーダ等が外界センサ21として搭載されている。外界センサ21は、検出した移動物体及び静止物体の相対位置及び種別等を示す物体情報を、通信バス29に逐次出力する。
ロケータ22は、GPS、GLONASS、Galileo、IRNSS、QZSS、Beidou等の衛星測位システムのうちで、少なくとも一つの衛星測位システムの各測位衛星から、測位信号を受信可能である。ロケータ22は、受信した測位信号に基づき、車両Aの位置を計測する。ロケータ22は、計測した車両Aの位置情報を通信バス29へ向けて逐次出力する。尚、ロケータ22は、位置情報を補正するための慣性センサを有していてもよい。
3次元地図データベース(以下、「3次元地図DB」)23は、多数の3次元地図データを格納した大容量の記憶媒体を主体とする構成である。3次元地図データは、例えば自動運転を可能にするような高精度な地図データであって、道路の緯度、経度、高度を示す情報を含んでいる。3次元地図DB23は、ネットワークを通じて、3次元地図データを最新の情報に更新可能である。3次元地図DB23は、描画ECU30からの要求に応じて、車両Aの周辺及び進行方向の3次元地図データを描画ECU30に提供可能である。
ハイトセンサ24は、車両Aが置かれた路面からボディまでの高さを計測するため、車両Aに生じる上下方向の変位を検出するセンサである。ハイトセンサ24は、例えば左右いずれか一方のリヤサスペンションに設置されている。ハイトセンサ24は、ボディに懸架されたサスペンションアームの動作によって上下方向に変位する特定の車輪について、ボディに対する沈み込み量を計測する。具体的に、ハイトセンサ24は、ボディとサスペンションアームとの間の相対距離を計測し、通信バス29に計測結果を逐次出力する。
車両制御ECU26は、マイクロコントローラを主体に構成された演算装置である。車両制御ECU26は、外界センサ21にて検出される物体情報、及び運転者の運転操作等に基づいて、車両Aの挙動を制御する。車両制御ECU26には、ペダルセンサ25が電気的に接続されている。ペダルセンサ25には、アクセルポジションセンサ及びブレーキ踏力センサが少なくとも含まれる。
車両制御ECU26は、ペダルセンサ25の検出信号に基づき、車両Aに発生させる前後方向の加速度、即ち、車軸トルク及びブレーキ力を制御する。加えて車両制御ECU26は、運転者の加減速操作及び路面の凹凸等の外乱に伴う車両Aの振動が抑制されるように、車軸トルク及びブレーキ力をフィードフォワード制御する。車両制御ECU26は、フィードフォワード制御における車軸トルク及びブレーキ力の各目標値を、制御情報として通信バス29に逐次出力する。
描画ECU30は、処理部、RAM、記憶装置及び入出力インターフェースを有するコンピュータを主体に構成されている。処理部は、CPU(Central Processing Unit)、GPU(Graphics Processing Unit)及びFPGA(Field-Programmable Gate Array)等の少なくとも一つを含む構成である。記憶装置には、処理部によって実行される種々のプログラムが格納されている。記憶装置に記憶された複数のプログラムには、描画データDSを生成する描画プログラム、及び車両Aの姿勢変化を推定する姿勢推定プログラム等が含まれている。
描画ECU30は、描画プログラム及び姿勢推定プログラムを処理部により実行し、センサ値取得部31、コンテンツ選定部34、対象情報取得部35、描画補正量算出部36及び描画データ生成部37等の機能部を備える。センサ値取得部31、コンテンツ選定部34及び対象情報取得部35は、通信バス29から情報を取得可能な機能部である。
センサ値取得部31は、ハイトセンサ24及び車両制御ECU26から出力される出力信号であって、車高の計測結果、並びに車軸トルク及びブレーキ力についての制御情報を受信する。センサ値取得部31は、これらの出力信号を処理し、低周波数帯域LBの姿勢変化に関連した姿勢変化情報を取得する。
コンテンツ選定部34は、通信バス29から取得する各種情報に基づき、虚像表示を行うコンテンツの選択及び調停を行う。具体的に、コンテンツ選定部34は、AR表示、常時表示及びイベント表示等の各要否と、それぞれの優先度等とを総合的に判定し、虚像Viを用いて運転者に通知すべき情報のコンテンツを選定する。コンテンツ選定部34は、選定したコンテンツを指定する指令と、選定したコンテンツの描画に必要な情報とを、描画データ生成部37に逐次提供する。
対象情報取得部35は、外界センサ21によって出力された物体情報を通信バス29から取得し、移動物体及び静止物体の中から、虚像Viを重畳させる重畳対象を選別する。対象情報取得部35は、選別した重畳対象の相対位置を、描画データ生成部37に逐次提供する。一例として、走行中の車線の路面を重畳対象とし、当該路面上にAR表示物11を重畳させる場合(図2参照)、対象情報取得部35は、左右両側の区画線の相対位置を、描画データ生成部37に逐次提供する。
描画補正量算出部36は、センサ値取得部31にて取得される低周波数帯域LBの姿勢変化情報を用いて、車両Aの現在姿勢を特定する。描画補正量算出部36は、特定した車両姿勢から、低周波数帯域LBの姿勢変化に伴う虚像Viの表示ずれを補正する補正量(以下、「低周波補正量」)を算出する。描画補正量算出部36は、算出した低周波補正量の値を、描画データ生成部37に逐次提供する。
描画データ生成部37は、描画データDSを生成する。描画データDSは、HUD100へ向けて出力する映像信号において、個々のフレームを構成する画像データである。描画データ生成部37は、映像出力線38によってHUD100と電気的に接続されている。描画データ生成部37は、生成した描画データDSを、予め規定された映像フォーマットにて、HUD100へ向けて逐次出力する。
描画データDSは、コンテンツ選定部34にて選定されたコンテンツに対応する複数の描画物を、仮の状態として、一つに纏めてなる仮合成データである。描画データDSには、複数の描画物として、AR表示物11の元画像となるAR描画物DS1と、各非AR表示物12の元画像となる非AR描画物DS2,DS3とが含まれている。
描画データ生成部37は、各コンテンツに対応する各描画物DS1~DS3を個別に描画したうえで、互いに重ならないように配置する。こうしたプレ合成の処理により、描画データ生成部37は、一つの描画データDSを生成する。描画データDSにおいて、各描画物DS1~DS3の各描画位置P1~P3、横解像度及び縦解像度は、予め規定された値に固定されている。一つの描画データDSに含まれる描画物DS1~DS3の数は、コンテンツ選定部34にて選定されるコンテンツの数に対応している。各描画物DS1~DS3は、LCD制御基板50による本合成(後述する)の処理により、正規の位置関係で再び合成される。
描画データ生成部37は、重畳対象の相対位置及び形状と、低周波数帯域LBの姿勢変化とを考慮した態様のAR描画物DS1を描画する。具体的に、描画データ生成部37は、予め設定されたアイポイント及び投影領域PAの各設定位置を、記憶装置等から読み出す。加えて描画データ生成部37は、対象情報取得部35から重畳対象の相対位置を取得すると共に、描画補正量算出部36から低周波補正量を取得する。描画データ生成部37は、アイポイント、投影領域PA及び重畳対象の相対的な位置関係を把握したうえで、これらの位置関係を低周波補正量で補正し、重畳対象に表示ずれなく重なり得る態様のAR描画物DS1を描画する。AR描画物DS1は、後述する高周波数帯域HBの姿勢変化を考慮し、本合成にて必要とされる(切り出される)画像サイズに対して、少なくとも上下方向に余裕代を確保された画像サイズに描画される。
HUD100は、ウィンドシールドWSの下方にて、インスツルメントパネルに設けられた収容空間に収容される車載表示器である。HUD100からウィンドシールドWSの投影領域PAへ向けて射出された虚像光Lviは、投影領域PAによってアイポイント側へ向けて反射され、運転者によって知覚される。運転者は、投影領域PAを通して見える前景に、虚像Viが重畳された表示を視認する。HUD100は、例えばアイポイントから車両Aの前方向に10~20m程度の空間中に虚像Viを結像させる。
HUD100は、虚像表示のための構成として、投影ユニット70、慣性センサ41、フィルタ回路42、LCD制御基板50及びBL制御基板60を備えている。
投影ユニット70は、虚像光Lviを投影領域PAに投影する光学的な構成である。投影ユニット70は、LCD(Liquid Crystal Display)71、バックライト72及び反射光学系73等によって構成されている。これらの光学要素は、HUD100の筐体40に収容されている。筐体40は、各光学要素の相対的な位置関係を高精度に規定している。
LCD71は、多数の画素が配列されてなる表示面を有している。LCD71は、各画素に設けられた赤色、緑色、及び青色等のサブ画素の光の透過率を増減させ、表示面に種々の画像をカラー表示する。各サブ画素における光の透過率は、LCD制御基板50によって制御される。LCD71の表示面には、本合成にて生成される出力データDScに基づいた元画像Piが表示される。
バックライト72は、多数の発光ダイオードを有する構成である。多数の発光ダイオードは、LCD71の背面側に配置されており、LCD71の表示面に沿って所定の間隔で2次元配列されている。バックライト72は、個々の発光ダイオードにて照明されるエリア毎に、発光輝度を調整可能な構成とされている。そして、各発光ダイオードの発光輝度は、BL制御基板60によって個別に制御される。バックライト72は、LCD71を背面側から透過照明し、表示面に描画された元画像Piを発光表示させる。その結果、元画像Piの光が、虚像光Lviとして表示面から射出される。
反射光学系73は、例えば凸面鏡及び凹面鏡等を含む構成とされている。凸面鏡及び凹面鏡は、合成樹脂又はガラス等からなる無色透明な基材の表面に、アルミニウム等の金属を蒸着させた反射鏡である。凸面鏡及び凹面鏡は、LCD71から射出された虚像光Lviを反射によって広げつつ、投影領域PAに投影し、元画像Piを拡大させてなる虚像Viを表示させる。尚、反射光学系73には、例えば回折によって元画像Piを拡大する回折光学素子(Diffractive Optical Element:DOE)等が用いられてもよい。
慣性センサ41は、車両Aの姿勢変化を計測する計測部であって、ジャイロセンサ及び加速度センサを組み合わせた構成である。慣性センサ41は、ハイトセンサ24及び車両制御ECU26とは別に車両Aに搭載されている。慣性センサ41は、車両Aにおけるピッチ方向及びロール方向の各角速度と、車両Aのヨー軸に沿った上下方向の加速度とを計測する。
慣性センサ41には、ローパスフィルタ及びAD変換部が設けられている。ローパスフィルタは、ジャイロセンサ及び加速度センサの各出力から、高周波ノイズを除去する。AD変換部は、ローパスフィルタを通過したアナログ信号を、デジタル信号に変換する。慣性センサ41は、例えばI2C(Inter-Integrated Circuit:登録商標)及びSPI(Serial Peripheral Interface)等の通信規格にて、フィルタ回路42に信号を送信できる。慣性センサ41は、上記の通信規格に従うデジタル形式とされた計測信号を、フィルタ回路42に出力する。
フィルタ回路42は、慣性センサ41から出力される計測信号を取得する。計測信号がフィルタ回路42に取得されるまでの遅延時間(以下、「計測遅延時間」)は、通信バス29にて生じる通信遅延時間よりも短くなっている。フィルタ回路42は、ハイパスフィルタ及び積分処理部等を少なくとも含む構成である。
ハイパスフィルタは、高周波数帯域HB(図4参照)の信号を概ね通過させ、低周波数帯域LB(図4参照)以下の信号を減衰させる。ハイパスフィルタのカットオフ周波数は、高周波数帯域HB及び低周波数帯域LBの境界値となるように設定されている。こうした設定により、ハイパスフィルタは、計測信号に含まれる周波帯域のうちで低周波数帯域LBと重複する帯域の信号を減衰させる。加えて、ハイパスフィルタの通過により、慣性センサ41のジャイロセンサに生じるドリフト成分が計測信号から除去される。
積分処理部は、例えばローパスフィルタを主体とした構成である。積分処理部は、姿勢変化の角速度を示す計測信号を時間積分する信号処理により、車両姿勢(ピッチ角,ロール角等)を示す信号を生成する。フィルタ回路42は、ハイパスフィルタ及び積分処理部を順に通過した信号を、高周波数帯域HBの姿勢変化情報として生成し、LCD制御基板50に逐次提供する。
図1、図5及び図6に示すLCD制御基板50は、投影ユニット70による虚像表示を制御する電気構成である。LCD制御基板50に形成された制御回路は、処理部50a、RAM、記憶装置、入出力インターフェース、及びこれらを接続するデータバスを備えたコンピュータ等を主体として含む構成である。
処理部50aは、RAMと結合された演算処理のためのハードウェアである。処理部50aは、RAMへのアクセスを制御するメモリコントローラを含んでいる。処理部50aは、CPU、GPU、FPGA及び他の専用機能を備えたIPコア等を少なくとも一つ含む構成である。
RAMは、処理部50aと結合されて、処理部50aのワーキングメモリとして機能する。LCD制御基板50には、RAMとして、第一メモリ151及び第二メモリ152が設けられている。第一メモリ151及び第二メモリ152は、例えばDDR(Dynamic Random Access Memory)2又はDDR3等の規格に準じたSDRAMのメモリモジュールを主体に構成されている。第一メモリ151及び第二メモリ152は、互いに実質同一構成の揮発性メモリであり、容量及びアクセス速度等も実質同一となるように揃えられている。第一メモリ151及び第二メモリ152は、それぞれ個別にデータバスに接続されている。
第一メモリ151及び第二メモリ152は、互いに独立した状態で、処理部50aのワーキングメモリとして機能可能である。具体的には、第一メモリ151及び第二メモリ152は、物理的に独立したメモリ構成として、データバスに繋がる回路基板上のメモリスロットに組み付けられている。さらに、処理部50aは、第一メモリ151へのアクセス期間中でも併行して第二メモリ152にアクセス可能である。同様に、処理部50aは、第二メモリ152へのアクセス期間中でも併行して第一メモリ151にアクセス可能である。即ち、処理部50aは、第一メモリ151及び第二メモリ152のうちの一方のアクセスに制限されることなく、他方のメモリにもアクセス可能である。
記憶装置は、ROM又はフラッシュメモリ等の不揮発性の記憶媒体を主体に構成されている。記憶装置には、処理部50aによって実行される表示制御プログラムが格納されている。LCD制御基板50は、表示制御プログラムを処理部50aによって実行し、描画データ取得部51、姿勢情報取得部52、姿勢補正設定部53、歪み補正設定部54及び出力生成部55等の機能部を備える。
描画データ取得部51は、映像出力線38を介して、描画データ生成部37と電気的に接続されている。描画データ取得部51には、虚像表示のための描画データDSが、描画データ生成部37から伝送される。描画データ取得部51は、映像出力線38を通じた受信によって描画データDSを準備する。
姿勢情報取得部52は、車両Aの姿勢に関連する姿勢情報として、高周波数帯域HB(図4参照)の姿勢変化情報を、フィルタ回路42から取得する。
姿勢補正設定部53は、姿勢情報取得部52にて取得された高周波数帯域HBの姿勢変化情報を用いて、高周波数帯域HB(図4参照)の姿勢変化に伴うAR表示物11のずれが低減されるように、AR描画物DS1に対して行う姿勢補正の内容を設定する。姿勢補正の内容は、最新の姿勢変化情報に基づき、描画データDS毎(1フレーム毎)に設定される。姿勢補正は、主にピッチングに起因する重畳対象からの虚像Viの位置ずれを低減(相殺)させるピッチ補正である。こうしたピッチ補正の対象は、車両Aに生じるピッチ方向の振動のうちで、上述の高周波数帯域HB(図4参照)の周波数帯域の振動とされる。
具体的に、姿勢補正設定部53は、姿勢補正において、AR描画物DS1における描画位置P1を、姿勢変化の方向に対応する側へオフセットさせる。姿勢補正設定部53は、予め規定された変換係数を、姿勢変化情報の示す姿勢変化量に適用(乗算)する処理により、オフセットさせるピクセル数(以下、「オフセットピクセル数」)を算出する。オフセットピクセル数は、車両Aの姿勢変化量(車両ピッチ角)が増えるほど、大きな値となる。姿勢補正設定部53は、描画位置P1にオフセットピクセル数を適用した位置を、切出基準位置P1cとする。AR描画物DS1のうちで、切出基準位置P1cを基準とした画像範囲が、後述する本合成の処理において使用される。以上のように、オフセットピクセル数及び切出基準位置P1cを決定する処理が、姿勢補正の内容を設定する処理に相当する。
尚、AR描画物DS1より切り出される画像範囲のサイズ(例えば1280×480ピクセル)は、AR描画物DS1のサイズ(例えば1280×720ピクセル)よりも小さく、且つ、出力データDScに用いられるサイズと同程度とされる。また、高周波数帯域HBの姿勢変化が無い場合、オフセットピクセル数がゼロとなり、切出基準位置P1cは、描画位置P1と一致する。
歪み補正設定部54は、姿勢補正設定部53にてAR描画物DS1から切り出される画像範囲が設定された後に、投影領域PAへの光の投影に伴う虚像Viの歪みが低減されるように、各描画物DS1~DS3に対して行う歪み補正の内容を設定する。歪み補正の内容は、投影領域PAにおけるウィンドシールドWSの湾曲形状に依拠している。歪み補正は、投影領域PA及び反射光学系73での反射に起因する虚像Viの変形を考慮し、歪みを低減(相殺)させた状態で虚像Viが表示されるように、出力データDScの形状を予め変形させておく補正となる。
歪み補正設定部54は、予め準備された複数種類の歪み補正テーブルTBc(図6の「合成&歪み補正テーブル」参照)の中から、出力生成部55での出力データDScの生成に用いられる一つを選択する。歪み補正テーブルTBcは、各描画物DS1~DS3の歪み補正に必要な歪み補正情報だけでなく、各描画物DS1~DS3の合成に必要な合成利用情報をさらに含む内容である。歪み補正テーブルTBcは、出力データDScの各画素が、描画データDSのどの画素に対応しているのかを紐付けている情報である。
一例として、歪み補正テーブルTBcは、出力画像座標及び元画像座標を含む一組のデータセットを多数連続させてなるファイル構成である。出力画像座標は、出力データDScにおける画素のX座標及びY座標を示す値である。元画像座標は、描画データDS(後述のプレ合成画像DSi)における画素のX座標及びY座標を示す情報である。
尚、描画データDS及び出力データDScにおける画素の並びは、一例として、左上が1ピクセル目の座標(0,0)とされており、右方向に行くに従い2ピクセル目、3ピクセル目・・・nピクセル目となる。そして、一つ下の行の左端の画素が、n+1ピクセル目となる。
複数種類の歪み補正テーブルTBcは、合成後における各描画物DS1~DS3のレイアウトに応じて設定されている。具体的には、AR描画物DS1に非AR描画物DS2,DS3を合成させない場合の(合成無し用の)歪み補正テーブルTBcが、少なくとも準備されている。加えて歪み補正設定部54は、合成を行う場合の歪み補正テーブルTBcとして、合成後の各描画物DS1~DS3のレイアウト(位置及びサイズ)が互いに異なる複数種類を、予め準備できる。
歪み補正設定部54は、描画データ取得部51にて取得される描画データDSに基づき、歪み補正テーブルTBcを選択する。尚、選択すべき歪み補正テーブルTBcを指示する指令が、描画データ生成部37によって提供されてもよい。こうして選択された歪み補正テーブルTBcの内容を、描画データDSに適用可能に読み出す処理が、歪み補正の内容を設定する処理に相当する。具体的に、第一実施形態では、補正回路154(後述する)による歪み補正テーブルTBcの読み出しが、歪み補正の内容の設定に相当する。歪み補正の内容も、姿勢補正の内容と同様に、描画データDS毎(フレーム毎)に設定される。歪み補正の内容は、補正回路154により、各描画物DS1~DS3に対し、纏めて適用される。
出力生成部55は、フレームバッファ内での信号処理により、描画データDSから出力データDScを生成する。出力生成部55は、姿勢補正設定部53にて設定された内容の姿勢補正の適用により、切出基準位置P1cを基準としてAR描画物DS1から切り出された画像範囲に、各非AR描画物DS2,DS3を合成する本合成の処理を実施する。
出力生成部55は、各描画物DS1~DS3を合成する処理に併行して、歪み補正設定部54にて設定された内容の歪み補正を、各描画物DS1~DS3に反映させる処理を実行する。出力生成部55は、合成後の各描画物DS1~DS3の配置に合わせて、切り出した個々の画像における画素の2次元配列を並び替える処理により、変形させた各描画物DS1~DS3を一つの画像に纏めてなる出力データDScを生成する。
BL(Backlight)制御基板60に設けられた駆動回路は、バックライト72の各発光ダイオードを個別に制御する部分駆動(ローカルデミング)により、バックライト72の発光輝度を複数のエリア毎に制御する。BL制御基板60は、姿勢補正設定部53による補正内容の設定後に、バックライト72のエリア制御の内容を決定する。
具体的に、BL制御基板60は、出力データDScを、出力生成部55から取得する。BL制御基板60は、歪み補正が反映された各描画物DS1~DS3の態様、即ち、出力データDScにおけるAR表示物11及び非AR表示物12の位置及び形状等に合わせて、バックライト72における各エリアの発光輝度を決定する。BL制御基板60は、決定した発光輝度にて各エリアを発光させる駆動信号を、バックライト72の各発光ダイオードへ向けて出力する。
図6に示すように、LCD制御基板50には、ここまで説明した機能部の各機能を実現する処理回路として、入力回路153及び補正回路154が設けられている。入力回路153及び補正回路154は、処理部50a(図1参照)に含まれる構成であり、データバスを通じて、それぞれ第一メモリ151及び第二メモリ152に高速アクセス可能である。
入力回路153は、描画データ取得部51(図1参照)の機能の少なくとも一部を含む回路部である。入力回路153は、第一メモリ151及び第二メモリ152のそれぞれに、データを書き込む処理を実行する。入力回路153は、LCD制御基板50の起動直後、虚像表示の開始前に、記憶装置に格納された複数種類の歪み補正テーブルTBcを読み出し、第一メモリ151及び第二メモリ152の両方に書き込む。第一メモリ151及び第二メモリ152には、実質同一の情報が、歪み補正テーブルTBcとして格納される。その結果、複数種類の歪み補正テーブルTBcが、第一メモリ151及び第二メモリ152に予め準備された状態となる。第一メモリ151及び第二メモリ152は、LCD制御基板50への給電が停止されるまで、歪み補正テーブルTBcのデータを消去することなく保持し続ける。
入力回路153は、描画ECU30からLCD制御基板50への描画データDSの出力が開始されると、映像出力線38を通じて伝送される描画データDSを受信する。入力回路153は、連続的に取得する描画データDSを、プレ合成画像DSiとして、第一メモリ151及び第二メモリ152に交互に書き込む処理を実施する。以上により、プレ合成画像DSiが準備された状態となる。
入力回路153は、n-1番目のフレームを第一メモリ151にプレ合成画像DSiとして書き込んだ場合、n番目のフレームを第二メモリ152にプレ合成画像DSiとして書き込む。プレ合成画像DSiは、第一メモリ151及び第二メモリ152のそれぞれにて、各歪み補正テーブルTBcの格納領域とは異なるアドレスに書き込まれる。こうしたスイッチングにより、第一メモリ151及び第二メモリ152は、補正回路154によって読み出し可能に、異なるプレ合成画像DSiを記憶した状態となる。
補正回路154は、姿勢補正設定部53、歪み補正設定部54及び出力生成部55(図1参照)の各機能の少なくとも一部を含む回路部である。補正回路154は、プレ合成画像DSiに対して、姿勢補正、本合成及び歪み補正の各処理を実質同時に適用し、出力データDScを生成する。補正回路154は、生成した出力データDScを、LCD71及びBL制御基板60へ向けて逐次出力する。
補正回路154は、出力データDScの生成に際して、第一メモリ151及び第二メモリ152の一方からプレ合成画像DSiを読み出しつつ、第一メモリ151及び第二メモリ152の他方から歪み補正テーブルTBcを読み出す。補正回路154は、他方のメモリから読み出す歪み補正テーブルTBcに従い、一方のメモリからのプレ合成画像DSiの読み出しを制御することで、出力データDScを生成する。
ここで、補正回路154は、入力回路153によってプレ合成画像DSiが書き込まれているメモリを、歪み補正テーブルTBcを読み出すメモリとする(図6の第二メモリ152に相当)。以上により、ランダムアクセスの発生し易いプレ合成画像DSiの読み出しに専従するメモリ(図6の第一メモリ151に相当)が確保される。
補正回路154は、読み出し対象とする歪み補正テーブルTBcを複数種類の中から選択する。補正回路154は、歪み補正テーブルTBcの元画像座標におけるY座標の値に対し、オフセットピクセル数を加算又は減算する処理を行いつつ、歪み補正テーブルTBcの値を順次読み出していく。歪み補正テーブルTBcにオフセットピクセル数が適用されることで、AR描画物DS1は、切出基準位置P1c(図5参照)を基準として、出力データDScに切り出されるようになる。
補正回路154は、歪み補正テーブルTBcの示す出力画像座標及び元画像座標間の位置関係に基づき、元画像座標の示す画素の画素データをプレ合成画像DSiから抽出し、出力画像座標の示す画素の画素データとして、逐次出力する。以上により、補正回路154より出力される出力データDScは、AR描画物DS1に対する姿勢補正処理、各描画物DS1~DS3の合成処理、及び各描画物DS1~DS3に対する歪み補正処理が全て適用された態様となる。
以上の虚像表示を実現するために、描画ECU30及びLCD制御基板50によって実施される各処理の詳細を、図7及び図8に基づき、図1、図5及び図6を参照しつつ説明する。図7及び図8に示す各処理は、例えば車両電源のオン状態への切り替えに基づき開始され、車両電源がオフ状態となるまで繰り替えされる。
図7に示す描画処理は、描画ECU30によって実施される。描画処理のS101では、通信バス29から取得される情報に基づき、虚像Viによって運転者に情報提示するコンテンツを選定し、S102に進む。S102では、S101にて選定したコンテンツに対応する描画物DS1~DS3を描画し、S103に進む。S103では、S102にて描画した各描画物DS1~DS3をプレ合成する処理により、一つの描画データDSを生成し、S104に進む。S104では、S103にて生成した描画データDSを、描画データ取得部51へ向けて出力する。
図8に示す補正処理は、LCD制御基板50によって実施される。補正処理のS111では、描画ECU30にて描画された描画データDSを、通信での取得によって準備し、S112に進む。S112では、高周波数帯域HB(図4参照)の姿勢変化情報を取得し、S113に進む。S113では、AR描画物DS1について、姿勢補正の内容を設定する。具体的に、S114では、S112にて取得した姿勢変化情報を考慮してオフセットピクセル数を算出し、切り出しの基準となる座標であり、画像を読み始めるアドレスとしての切出基準位置P1cを決定する。
S114では、各描画物DS1~DS3に適用する歪み補正テーブルTBcを選択する。そして、S113にて設定した姿勢補正の内容を適用しつつ、選択した歪み補正テーブルTBcを読み出すことで、歪み補正の内容を設定し、S115に進む。S115では、S114にて読み出しを開始した歪み補正テーブルTBcの内容に従い、プレ合成画像DSiから出力データDScを生成する本合成の処理を開始し、S116に進む。S115は、描画データDSの画素を、出力データDScの画素として再配列する処理となる。S116では、S115にて生成した出力データDScを、LCD71及びBL制御基板60へ向けて出力する。第一実施形態では、1フレームとなる描画データDS及び出力データDScに対し、S114、S115及びS116の処理が一体的に実施される。BL制御基板60は、S116にて出力される出力データDScに基づき、各描画物DS1~DS3の態様に対応するバックライト72のエリア制御を実施する。
ここまで説明した第一実施形態では、重畳対象に対するAR表示物11の表示ずれが低減されるように、AR描画物DS1に対して行う姿勢補正の内容が設定された後で、その虚像Viの歪みを低減させる歪み補正の内容が、さらに設定される。そのため、車両Aの姿勢変化に対応するための補正がAR描画物DS1の準備後に実施されても、AR描画物DS1に基づくAR表示物11の虚像Viは、歪みを抑制された態様にて、表示可能となる。
具体的に第一実施形態では、一つのプレ合成画像DSiに対し、姿勢補正の内容として、まず切出基準位置P1cが設定される。その後、このプレ合成画像DSiに対し適用される歪み補正テーブルTBcが選択され、補正回路154に設定される。そして、補正回路154は、歪み補正テーブルTBcの内容に従い、切出基準位置P1cに基づく画像範囲を変形させて、出力データDScのAR描画物DS1を生成する。以上の処理によれば、描画ECU30での描画後、且つ、LCD71による表示直前にて姿勢補正を行ったとしても、AR表示物11の虚像Viは、適切に歪みを抑制された態様となり得る。
加えて第一実施形態では、AR描画物DS1と非AR描画物DS2,DS3とを本合成する処理が、姿勢補正の内容の設定後に実施される。この本合成において、AR描画物DS1は、重畳対象に対するAR表示物11の表示ずれが低減されるような姿勢補正の内容が適用されたうえで、非AR描画物DS2,DS3と合成される。そして、虚像Viの歪みを低減させる歪み補正の内容は、これらAR描画物DS1及び非AR描画物DS2,DS3への適用を前提に設定される。
以上によれば、車両の姿勢変化に対応するための補正及び非AR描画物DS2,DS3との合成が、AR描画物DS1の準備後に実施されたとしても、AR表示物11の虚像Viは、歪みを抑制された態様にて、表示可能となる。さらに、AR描画物DS1に基づくAR表示物11だけでなく、非AR描画物DS2,DS3に基づく非AR表示物12も、歪みを抑制された状態で、虚像表示され得る。
また第一実施形態では、歪み補正テーブルTBcに規定されたプレ合成画像DSi及び出力データDSc間の画素位置の対応関係に基づき、補正回路154が、歪み補正の内容を適用しつつ、各描画物DS1~DS3の本合成を実施する。このように、歪み補正と本合成とがひと纏まりの処理として実行されれば、出力データDScの生成は、低負荷且つ高速で実施され易くなる。
さらに第一実施形態では、本合成に合わせて、姿勢補正の内容をAR描画物DS1データに適用する処理が実施される。このように、姿勢補正の実施が本合成と併行して実施されれば、姿勢補正の実施から出力データDScの出力までの遅延時間が短縮され得る。したがって、各描画物DS1~DS3を合成する虚像表示を行ったとしても、AR表示物11の虚像Viは、重畳対象に適切に追従し得る。
ここで、本合成を行うことなく、描画データ生成部37より提供される描画データDSに対して姿勢補正を実施してしまうと、AR表示物11の表示ずれが低減できたとしても、非AR表示物12,13は、投影ユニット70の画角から見切れてしまい得る。故に、第一実施形態のように、姿勢補正の適用後に本合成を実施すれば、AR表示物11の表示ずれを低減したうえで、非AR表示物12,13の見切れも、回避可能となる。したがって、虚像Viとして結像されるAR表示物11及び非AR表示物12は共に、運転者にとって違和感の無い態様にて、表示可能となる。
加えて第一実施形態では、テーブル形式で作成された歪み補正テーブルTBcが、合成利用情報を含む内容で、予め準備されている。故に、出力生成部55は、歪み補正テーブルTBcに基づくことで、本合成を歪み補正と並行して実行し得る。したがって、テーブル形式での合成利用情報の準備によれば、出力データDScの生成に伴う演算負荷の軽減が可能になる。
さらに第一実施形態では、低周波数帯域LBの姿勢変化に起因するAR表示物11の表示ずれは、描画データ生成部37でのAR描画物DS1の描画段階にて、予め補正され得る。そのためLCD制御基板50は、高周波数帯域HBの姿勢変化に起因するAR表示物11の表示ずれが低減されるように、姿勢補正の内容を設定すればよくなる。こうした高周波数帯域HBの姿勢変化は、低周波数帯域LBの姿勢変化よりも、振幅の小さな動きとなる(図4参照)。故に、LCD制御基板50での姿勢補正を高周波数帯域HBに特化させれば、AR描画物DS1に確保された余裕代の最大範囲内で、AR表示物11を重畳対象に追従させることができる。
加えて第一実施形態では、出力データDScを取得するBL制御基板60が、歪み補正を反映されてなるAR描画物DS1の態様に合わせて、バックライト72におけるエリア毎の発光輝度を制御する。故に、出力データDScの生成の実質最終段階にて、歪み補正が実施されても、バックライト72の照明と、各表示物11,12との間にずれが生じる事態は、回避され得る。
また第一実施形態では、合成利用情報を含む複数の歪み補正テーブルTBcがテーブル形式で準備されている。故に、歪み補正テーブルTBcの数を増やすことで、合成後での各描画物DS1~DS3の配置のバリエーションを増やすことができる。
尚、第一実施形態において、描画データDS及びプレ合成画像DSiが「仮合成データ」に相当し、出力データDScが「再合成データ」に相当し、AR描画物DS1が「特定描画データ」に相当し、非AR描画物DS2,DS3が「別描画データ」に相当する。また、歪み補正テーブルTBcが「合成利用情報」に相当し、AR表示物11が「特定表示物」に相当し、非AR表示物12が「別表示物」に相当し、処理部50aが「プロセッサ」に相当する。さらに、描画データ取得部51が「描画データ準備部」に相当し、出力生成部55が「画像合成部」に相当し、BL制御基板60が「輝度制御部」に相当し、HUD100が「表示制御装置」に相当する。
(第二実施形態)
図9~図11に示す第二実施形態は、第一実施形態の変形例である。第二実施形態の虚像表示システムにおいて、描画ECU30は、映像出力線38に加えて、コード出力線39によってもLCD制御基板50と接続されている。加えてLCD制御基板50は、描画プログラムに基づく機能部として、コンテンツ選定部34及び描画データ生成部37等に加えて、合成利用情報生成部237をさらに備える。
合成利用情報生成部237は、LCD制御基板50での本合成にて用いられる合成利用情報を含んだコードCDを生成する。第二実施形態における合成利用情報は、合成利用情報生成部237にて逐次生成され、コード出力線39を通じてLCD制御基板50にメッセージデータとして提供される。コードCDは、一つの描画データDSに含まれるコンテンツ(描画物)の数と、各描画物DS1~DS3の詳細を示す詳細情報とが記述されてなる1次元的な文字列の情報である。
詳細情報は、各描画物DS1~DS3の本合成に用いられる情報である。コードCDでは、コンテンツの数を示す情報の後に、AR描画物DS1について詳細情報が記述されており、その後に、二つ目の非AR描画物DS2についての詳細情報、三つ目の非AR描画物DS3についての詳細情報が、順に記述されている。
各描画物DS1~DS3の詳細情報には、スイッチ情報、対応座標情報、補正要否情報及び調整範囲情報が含まれている。スイッチ情報は、各描画物DS1~DS3を出力データDScに描画するか否かを指示する情報であり、換言すれば、各表示物11~13の表示及び非表示を指示する情報である。スイッチ情報がオン状態を指示している場合、対応する描画物DS1~DS3は、出力データDScに描画される。一方で、スイッチ情報がオフ状態を指示している場合、対応する描画物DS1~DS3は、出力データDScに描画されない。合成利用情報生成部237は、スイッチ情報として記述するオン及びオフの値を一定の時間間隔で切り替えることにより、各表示物11~13の虚像Vi(図2参照)を点滅表示させることができる。
対応座標情報は、描画データDSにおける各描画物DS1~DS3の各座標と、出力データDScにおける各描画物DS1~DS3の各座標との対応関係を規定する情報である。補正要否情報は、各描画物DS1~DS3について、姿勢変化に伴う補正の要否を示す情報である。AR描画物DS1の詳細情報には、補正が必要なことを示す補正要否情報が記述されている。一方、非AR描画物DS2,DS3の詳細情報には、補正が不要なことを示す補正要否情報が記述されている。調整範囲情報は、AR描画物DS1に対して実施可能な姿勢補正の最大範囲を示す情報である。
こうしたコードCDについてのさらに詳細な具体例が図11には記載されている。図11に示すコードCDの各詳細情報には、上述のスイッチ情報、プレ合成時の描画位置P1~P3、プレ合成時の横解像度、プレ合成時の縦解像度、本合成時の表示位置P1s~P3sが順に記述されている。さらに、本合成時の横解像度、本合成時の縦解像度、ピッチング等の姿勢変化に対する位置補正の要否、姿勢変化に追従して補正可能な上側への余裕代となる解像度、下側への余裕代となる解像度が、続けて記述されている。そして、姿勢変化量とオフセットピクセル数との対応関係を規定した変換係数が、さらに続けて記述されている。
これらの詳細情報うちで、プレ合成時の描画位置P1~P3及び本合成時の表示位置P1s~P3sが、上述の対応座標情報に相当する。また、姿勢変化に対する位置補正の要否が、上述の補正要否情報に相当する。さらに、補正可能な上側及び下側への余裕代となる各解像度が、上述の調整範囲情報に相当する。尚、非AR描画物DS2,DS3の詳細情報では、余裕代となる各解像度が記述される部分は、ブランクの状態とされている。
LCD制御基板50には、第一実施形態と実質同一の各機能部(図1参照)が設けられている。描画データ取得部51は、合成利用情報生成部237よりコード出力線39を通じて送信されるコードCDを取得する。姿勢補正設定部53は、コードCDにおけるAR描画物DS1の詳細情報に記述された変換係数に、姿勢変化情報の示す姿勢変化量を適用する処理により、オフセットピクセル数を算出する。姿勢補正設定部53は、詳細情報にある描画位置P1を、オフセットピクセル数に基づきシフトさせる処理により、切出基準位置P1cを設定する。
出力生成部55は、姿勢補正設定部53にて設定された切出基準位置P1c、コードCDの詳細情報に記述された描画位置P2,P3、及びプレ合成時におけるそれぞれの解像度を参照する。加えて出力生成部55は、コードCDの詳細情報に記述された各描画物DS1~DS3の各表示位置P1s~P3s及びプレ合成時におけるそれぞれの解像度を参照する。出力生成部55は、これらの対応関係に基づき、描画データDSから各描画物DS1~DS3を切り出し、個々の解像度を調整したうえで、一つの画像データ(後述の合成画像DSm)に合成する。但し、出力生成部55は、スイッチ情報にてオフ状態が指示されている描画物を、合成後の画像データに含めないようにする。
以上の画像処理を実施するため、第二実施形態によるLCD制御基板50には、第一実施形態と実質同一の入力回路153に加えて、合成回路254及び歪み補正回路255が設けられている。合成回路254及び歪み補正回路255は、処理部50a(図1参照)に含まれる構成であり、データバスを通じて、それぞれ第一メモリ151及び第二メモリ152に高速アクセス可能である。
合成回路254は、姿勢補正設定部53及び出力生成部55(図1参照)の各機能の少なくとも一部を含む回路部である。合成回路254は、プレ合成画像DSiに対して、姿勢補正及び本合成の各処理を実質同時に適用し、合成画像DSmを生成する。合成回路254は、第一メモリ151及び第二メモリ152の一方からプレ合成画像DSiを読み出しつつ、コードCDの各詳細情報を参照する。そして合成回路254は、一つのプレ合成画像DSiに含まれる各描画物DS1~DS3を、各表示位置P1s~P3sを基準として再配置し、一つの合成画像DSmを生成する。合成回路254は、第一メモリ151及び第二メモリ152のうちで、プレ合成画像DSiを読み出しているメモリに、生成した合成画像DSmを書き込んでいく。
歪み補正回路255は、歪み補正設定部54及び出力生成部55(図1参照)の各機能の少なくとも一部を含む回路部である。第二実施形態でも、第一メモリ151及び第二メモリ152のそれぞれに同一内容の歪み補正テーブルTBcが、歪み補正回路255によって読み出し可能に予め準備されている。第二実施形態の歪み補正テーブルTBcは、第一実施形態とは異なり、合成利用情報を含んでいない。歪み補正テーブルTBcは、出力データDSc及びプレ合成画像DSiの間における画素の位置関係を規定した情報となっている。
歪み補正回路255は、合成画像DSmに対する歪み補正の適用により、出力データDScを生成する。歪み補正回路255は、生成した出力データDScを、LCD71及びBL制御基板60へ向けて逐次出力する。歪み補正回路255は、合成回路254による合成画像DSmの書き込みが行われているメモリ(図9の第一メモリ151に相当)を、歪み補正テーブルTBcの読み出し対象とする。加えて歪み補正回路255は、入力回路153によるプレ合成画像DSiの書き込みが行われているメモリ(図9の第二メモリ152に相当)を、合成画像DSmの読み出し対象とする。歪み補正回路255は、歪み補正テーブルTBcの内容に基づき、合成画像DSmから画素データを抽出し、出力データDScの画素データとして、LCD71及びBL制御基板60に逐次出力する。
以上のLCD制御基板50にて実施される補正処理(図11参照)のS211では、描画データ生成部37にて生成された描画データDSと、合成利用情報生成部237にて生成されたコードCDとを、通信による取得によって準備し、S212に進む。S212では、姿勢変化情報を取得し、S213に進む。S213では、S211にて取得したコードCDを参照する。そして、各描画物DS1~DS3について、出力データDScへの描画の要否を、スイッチ情報に基づき判定する。さらに、各描画物DS1~DS3について、姿勢補正の要否を、補正要否情報に基づき判定する。
S214では、姿勢補正が必要であると判定されたAR描画物DS1について、姿勢補正の内容を設定する。具体的に、S214では、S212にて取得した姿勢変化情報に基づき、切出基準位置P1cを設定する。一方で、非AR描画物DS2,DS3については、コードCDに記述されたプレ合成時の各描画位置P2,P3の参照により、画像を読み始めるアドレスを決定する。そしてS215にて、合成画像DSmを生成し、S216に進む。
S216では、各描画物DS1~DS3に適用する歪み補正テーブルTBcを選択する。そして、歪み補正の内容を設定するため、選択した歪み補正テーブルTBcの読み出しを開始し、S217に進む。S217では、S216にて読み出しを開始した歪み補正テーブルTBcの内容に従い、合成画像DSmから出力データDScを生成する処理を開始し、S218に進む。S218では、S217にて生成した出力データDScを、LCD71及びBL制御基板60へ向けて出力する処理を開始する。
ここまで説明した第二実施形態では、一つの描画データDSに対し、姿勢補正の内容設定及び適用が実施された後に、歪み補正の内容設定及び適用が実施される。こうした第二実施形態でも、第一実施形態と同様の効果を奏し、AR表示物11の虚像Viは、歪みを抑制された態様にて、表示可能となる。加えて、各非AR表示物12,13の各虚像Viも、歪みを抑制された態様であり、且つ、HUD100の画角から見切れることなく、表示可能となる。
加えて第二実施形態では、各描画物DS1~DS3の本合成後に、歪み補正が実施される。このように、歪み補正の処理を、本合成の処理と切り分ける設定によれば、本合成にて実施可能な処理のバリエーションが確保容易となる。一例として、描画ECU30は、非AR描画物DS2,DS3を、合成画像DSmの複数の箇所に配置する設定を、コードCDに記述することができる。また別の一例として、描画ECU30は、対応座標情報として記述する表示位置P2s,P3sの座標設定により、複数の描画物を重ねた状態で合成画像DSmに再配置させ得る。
また第二実施形態では、本合成に用いられる合成利用情報を含んだコードCDが、合成利用情報生成部237にて生成され、LCD制御基板50に提供される。その結果、本合成の実施に伴うLCD制御基板50の処理負荷は、コードCDが準備されない場合と比較して、軽減可能となる。
さらに第二実施形態の合成利用情報生成部237は、非AR描画物DS2,DS3の詳細情報に対応座標情報として記述する表示位置P2s,P3sの座標を経時的に変化させることができる。以上によれば、非AR表示物12,13の虚像Viを表示上で移動させるような動的なアニメーションの表示が可能になる。
加えて第二実施形態では、姿勢補正の要否を示す補正要否情報が、コードCDの中に含まれている。故に、出力生成部55は、AR表示物11及び非AR表示物12が混在していても、AR表示物11に紐づくAR描画物DS1を適切に選別できる。その結果、出力生成部55は、選別したAR描画物DS1に対し姿勢補正を行いつつ、他の非AR描画物DS2,DS3と合成する。以上によれば、出力データDScに、AR表示物11及び非AR表示物12,13が混在していても、各虚像Viは、見切れ等がない適切な態様で表示され得る。
また第二実施形態では、AR描画物DS1について、実施可能な姿勢補正の最大範囲を示す調整範囲情報が、コードCDの中に含まれている。故に、振幅の大きな姿勢変化が生じた場合、出力生成部55は、重畳対象に追従させる補正を一時的に中断できる。以上によれば、姿勢変化を補正するために、AR表示物11の一部が見切れてしまい、違和感ある虚像Viが表示されてしまう事態は、回避され得る。
また第二実施形態では、合成利用情報が、文字列で記述されている。こうした形式であれば、描画ECU30は、プレ合成画像DSiから合成画像DSmを生成する際の詳細な指示を、LCD制御基板50に与え易くなる。その結果、LCD制御基板50にて生成される出力データDScのバリエーションが確保され易くなるため、ユーザの利便性の高い虚像表示が実現され得る。尚、第二実施形態では、コードCDが「合成利用情報」に相当し、合成画像DSmが「再合成データ」に相当し、スイッチ情報が「表示設定情報」に相当する。
(第三実施形態)
図12に示す第三実施形態は、第二実施形態の変形例である。第三実施形態では、描画データ生成部37が、第二実施形態の合成利用情報生成部237(図9参照)の機能を含んでいる。即ち、描画ECU30において、合成利用情報を含むコードCDが、描画データ生成部37によって生成される。描画データ生成部37は、プレ合成(図7 S103参照)の処理にて、描画データDSに紐付くコードCDを逐次生成する。描画データ生成部37は、各描画物DS1~DS3にコードCDを含ませた態様にて、描画データDSを生成し、映像出力線38を通じてLCD制御基板50に伝送する。コードCDは、例えば一つの描画データDSのうちの最上段の一行の画素に埋め込まれている。描画データ取得部51(図1参照)は、描画データDSの取得により、本合成のためのコードCDも合わせて取得可能となる。
加えて第三実施形態では、合成回路254及び歪み補正回路255によるデータの読み出し及び書き込みの手法が、第二実施形態とは異なっている。具体的に、合成回路254は、第一メモリ151及び第二メモリ152のうちで、プレ合成画像DSiを読み出していないメモリ(図12の第二メモリ152に相当)に、生成した合成画像DSmを書き込んでいく。その結果、歪み補正回路255は、合成回路254によるプレ合成画像DSiの書き込みが行われていないメモリ(図12の第一メモリ151に相当)を、一つ前の合成画像DSmを読み出す対象とする。加えて歪み補正回路255は、合成回路254による合成画像DSmの書き込みが行われているメモリ(図12の第二メモリ152に相当)を、歪み補正テーブルTBcを読み出す対象とする。歪み補正回路255は、歪み補正テーブルTBcの内容に従い、合成画像DSmを変形させてなる出力データDScを生成する。
ここまで説明した第三実施形態でも、第二実施形態と同様の効果を奏し、AR表示物11及び非AR表示物12,13の各虚像Viは、歪みを抑制された態様にて、表示可能となる。
(第四実施形態)
図13に示す第四実施形態は、第二実施形態の別の変形例である。第四実施形態のLCD制御基板50には、入力合成回路453が、第二実施形態と実質同一の歪み補正回路255と共に設けられている。入力合成回路453は、処理部50a(図1参照)に含まれる構成であり、第一メモリ151及び第二メモリ152に高速アクセス可能である。
入力合成回路453は、描画データ取得部51、姿勢補正設定部53及び出力生成部55(図1参照)の各機能の少なくとも一部を含む回路部である。第四実施形態にて、入力合成回路453の取得する描画データDSでは、AR描画物DS1の下方に各非AR描画物DS2,DS3が並べられている。入力合成回路453は、コード出力線39を通じて取得するコードCD(図10参照)の各詳細情報に基づき、映像出力線38を通じて入力される描画データDSから合成画像DSmを生成する。具体的に、入力合成回路453は、コードCDの各詳細情報と、姿勢変化情報とも基づき、描画データDSに対して姿勢補正及び本合成の各処理を実質同時に適用する。その結果、入力合成回路453は、第二実施形態の合成回路254(図9参照)と同様に、一つの描画データDSに含まれる各描画物DS1~DS3を、各表示位置P1s~P3sを基準として再配置し、合成画像DSmを生成する。入力合成回路453は、生成した合成画像DSmを書き込むメモリを、第一メモリ151及び第二メモリ152のうちで、1フレーム毎に、交互に切り替える。
歪み補正回路255は、入力合成回路453によって合成画像DSmの書き込みが行われていないメモリ(図13の第一メモリ151に相当)を、1フレーム前の合成画像DSmを読み出す対象とする。加えて歪み補正回路255は、入力合成回路453によって合成画像DSmが書き込まれているメモリ(図13の第二メモリ152に相当)を、歪み補正テーブルTBcを読み出す対象とする。歪み補正回路255は、合成画像DSmを歪み補正テーブルTBcの内容に基づき変形させ、出力データDScとして、LCD71及びBL制御基板60に逐次出力する。
ここまで説明した第四実施形態でも、第二実施形態と同様の効果を奏し、AR表示物11及び非AR表示物12,13の各虚像Viは、歪みを抑制された態様にて、表示可能となる。
加えて第四実施形態でも、第二実施形態のように、非AR描画物DS2,DS3を合成画像DSmの複数の箇所に配置すること、各描画物DS1~DS3を互いに重ねた状態で合成画像DSmに再配置させること等が可能である。さらに第四実施形態では、各表示物11~13の点滅表示及び動的なアニメーション表示等も実施可能となる。
また第四実施形態の入力合成回路453は、描画データDSを取得する処理において、プレ合成画像DSi(図9参照)のRAMへの一時保存を実施しない。入力合成回路453は、姿勢補正及び本合成を適用した合成画像DSmをRAMに保存できる。以上によれば、プレ合成画像DSiを保存する場合と比較して、1フレーム分の遅延低減が可能になる。
さらに第四実施形態の描画データDSでは、AR描画物DS1の下方に非AR描画物DS2,DS3が配置されているため、描画データDSのうちで、ブランクとなる画素の数が少なくなる。以上によれば、描画ECU30及びLCD制御基板50にて出力データDScの生成に用いられる演算資源が低減され得る。
(第五実施形態)
図14及び図15に示す第五実施形態は、第一実施形態の別の変形例である。第五実施形態の虚像表示システムは、描画ECU30、HUD570及び表示制御装置500等によって構成されている。
描画ECU30の描画データ生成部37は、映像出力線38及びコード出力線39によって表示制御装置500と接続されている。描画データ生成部37は、第一実施形態と同様に、コンテンツ選定部34にて選定されたコンテンツに対応する複数の描画物DS1~DS3を描画する。一方で、描画データ生成部37は、これらの描画物DS1~DS3のプレ合成処理を実施しない。描画データ生成部37は、各描画物DS1~DS3を、映像出力線38を通じて、個別に表示制御装置500へ向けて送信する。
加えて描画データ生成部37は、第二実施形態と同様に、各描画物DS1~DS3の描画に併行して、本合成に用いられるコードCDを生成する。一方で、第五実施形態のコードCDは、2次元的なテーブル形式で生成される。一つの行には、一つの描画物の詳細情報が記載されている。描画データ生成部37は、テーブルにおける行数を増やすことで、プレ合成される描画物の数の増加に対応する。描画データ生成部37は、生成したコードCDを、コード出力線39を通じて、表示制御装置500へ向けて送信する。尚、第五実施形態のコードCDからは、スイッチ情報が省略されている(図15参照)。
HUD570は、第一実施形態の投影ユニット70(図1参照)に相当する構成であり、ウィンドシールドWSの投影領域PAへ向けて、AR表示物11及び非AR表示物12として結像される虚像光Lviを投影する。HUD570は、反射光学系73に加えて、レーザモジュール(以下「LSM」)571及びスクリーン572を備えている。
LSM571は、例えばレーザ光源及びMEMS(Micro Electro Mechanical Systems)スキャナ等を含む構成である。LSM571は、レーザ光源の発光と、MEMSスキャナのミラー部の走査とを、表示制御装置500のLSM制御基板550によって制御される。LSM571は、スクリーン572へ向けて照射するレーザ光の走査により、スクリーン572に元画像Piを描画する。
スクリーン572は、例えばガラス等の無色透明な材料によって横長の矩形板状に形成されている。スクリーン572は、例えばマイクロミラーアレイである。スクリーン572には、レーザ光を反射するスクリーン反射面が設けられている。スクリーン反射面には、アルミニウム等の金属の蒸着によって形成された多数の微小な反射凸面が2次元配列されている。スクリーン反射面には、出力データDScに基づく元画像PiがLSM571レーザの走査によって表示される。
表示制御装置500は、慣性センサ41及びフィルタ回路42に加えて、LSM制御基板550を備えている。LSM制御基板550は、第一実施形態のLCD制御基板50(図1参照)に相当する構成であって、HUD570による虚像表示を制御する電気構成である。LSM制御基板550は、表示制御プログラムを処理部550aによって実行し、第一実施形態と実質同一の描画データ取得部51、姿勢情報取得部52、姿勢補正設定部53、歪み補正設定部54及び出力生成部55等の機能部を有する。
描画データ取得部51は、映像出力線38及びコード出力線39を介して、描画データ生成部37と電気的に接続されている。描画データ取得部51には、各描画物DS1~DS3と、これらの合成に必要なコードCDとが、同期可能な状態で、描画データ生成部37より提供される。描画データ取得部51は、映像出力線38及びコード出力線39を通じた受信により、各描画物DS1~DS3及びコードCDを準備する。
出力生成部55は、各描画物DS1~DS3から出力データDScを生成する。出力生成部55は、AR描画物DS1から切り出される画像範囲が姿勢補正設定部53にて設定された後に、コードCDに記述された本合成時の表示位置及び解像度等の情報を参照し、各描画物DS1~DS3を一つの画像データに本合成する処理を実施する。出力生成部55は、各描画物DS1~DS3の描画と併行して、又は各描画物DS1~DS3を合成した後に、歪み補正設定部54にて設定された歪み補正の内容を合成画像に反映させ、出力データDScを生成する。出力生成部55は、出力データDScに基づく元画像Piがスクリーン572に描画されるように、LSM571を制御する。
ここまで説明した第五実施形態でも、第一実施形態と同様の効果を奏することが可能である。即ち、車両Aの姿勢変化に対応するための補正が、AR描画物DS1の準備後に実施されても、AR表示物11の虚像Viは、歪みを抑制された態様にて、表示可能となる。尚、第五実施形態では、処理部550aが「プロセッサ」に相当する。
(第六実施形態)
図16に示す第六実施形態は、第一実施形態のさらに別の変形例である。第六実施形態の虚像表示システムは、HUD670及び表示制御装置600等によって構成されている。
HUD670は、第五実施形態のHUD570(図14参照)と同様に、投影領域PAへ向けた虚像光Lviの投影により、AR表示物11及び非AR表示物12を運転者から視認可能に表示する。HUD670は、反射光学系73及びスクリーン572に加えて、DLP(Digital Light Processing,登録商標)プロジェクタ671を備えている。
DLPプロジェクタ671は、多数のマイクロミラーが設けられたデジタルミラーデバイス(以下、「DMD」)と、DMDに向けて光を投射する投射光源とを有している。DMD及び投射光源は、表示制御装置600のDLP制御基板650に電気的に接続されている。DMDによる光の走査と投射光源の発光とは、DLP制御基板650によって統合的に制御される。DLPプロジェクタ671は、DLP制御基板650の制御により、出力データDScに基づく元画像Piを、スクリーン572に描画する。スクリーン572に表示された元画像Piの光は、反射光学系73により、虚像光Lviとして投影領域PAに投影される。
表示制御装置600は、第五実施形態の描画ECU30(図14参照)及び表示制御装置500(図14参照)の各機能を一体的に有した電気構成である。表示制御装置600は、慣性センサ41及びフィルタ回路42に加えて、描画基板630及びDLP制御基板650を備えている。
描画基板630は、描画ECU30(図15参照)と実質同一の機能を有しており、描画データ生成部37において、予め規定されたフォーマットで、複数の描画物DS1~DS3を描画する。描画データ生成部37は、映像出力線38を通じて、各描画物DS1~DS3を、個別にDLP制御基板650へ向けて送信する。第六実施形態の描画データ生成部37は、第一実施形態と同様に、コードCDの生成及び送信を実施しない。
DLP制御基板650は、第一実施形態のLCD制御基板50(図1参照)に相当する構成であって、HUD670による虚像表示を制御する電気構成である。DLP制御基板650は、表示制御プログラムを処理部650aによって実行し、第一実施形態と実質同一の描画データ取得部51、姿勢情報取得部52、姿勢補正設定部53、歪み補正設定部54及び出力生成部55等の機能部を有する。
描画データ取得部51は、映像出力線38を介して、描画データ生成部37と電気的に接続されている。描画データ取得部51には、各描画物DS1~DS3が、描画データ生成部37より提供される。
出力生成部55は、描画物DS1~DS3から出力データDScを生成する。出力生成部55は、記憶装置に予め記憶された合成利用情報を参照し、各描画物DS1~DS3を一つの画像データに本合成する。さらに出力生成部55は、歪み補正設定部54にて設定された歪み補正の内容を反映させる処理を、本合成後又は本合成と同時に実施して、出力データDScを生成する。出力生成部55は、出力データDScに基づく元画像Piがスクリーン572に描画されるように、DLPプロジェクタ671を制御する。
ここまで説明した第六実施形態でも、第一実施形態と同様の効果を奏することが可能である。即ち、車両Aの姿勢変化に対応するための補正が、AR描画物DS1の準備後に実施されても、AR表示物11の虚像Viは、歪みを抑制された態様にて、表示可能となる。尚、第六実施形態では、処理部650aが「プロセッサ」に相当する。
(他の実施形態)
以上、本開示の複数の実施形態について説明したが、本開示は、上記実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
上記実施形態の本合成では、複数の描画物は、互いに重ならないようなレイアウトにて、一つ画像データに再配置されていた。しかし、本合成にて生成される出力データにおいて、各描画物の配置は、適宜変更されてよい。例えば、図17に示す変形例1のように、複数の描画物DS1~DS3は、出力データDScにて、AR描画物DS1に二つの非AR描画物DS2,DS3が重ねられるように合成されてもよい。この場合、AR描画物DS1から切り出される画像のうちで、各非AR描画物DS2,DS3と重なる範囲は、画素データの読み出しをスキップされてよい。又は、AR描画物DS1から切り出される画像の画素データが、非AR描画物DS2,DS3の画素データによって上書きされてよい。
上記各実施形態のように、描画データ生成部から描画データ取得部への情報の伝送方法は、適宜変更されてよい。例えば図18に示す変形例2では、描画データ生成部37及び描画データ取得部51が、映像出力線38によって接続されている。そして、複数の描画物DS1~DS3のうちの一つ(例えばAR描画物DS1)に、コードCDが埋め込まれている。こうした構成であっても、出力生成部55において出力データDScを生成する本合成の処理は、コードCDによって円滑化され得る。
また図19に示す変形例3では、描画データ生成部37及び描画データ取得部51は、映像出力線38及びコード出力線39の両方によって接続されている。描画データ生成部37は、各描画物DS1~DS3をプレ合成し、仮合成データとしての描画データDSを生成したうえで、映像出力線38を通じて、描画データ取得部51に描画データDSを送信する。さらに、描画データ生成部37は、プレ合成に併行して、コードCDを生成し、コード出力線39を通じて、描画データ取得部51に送信する。
さらに変形例4では、上記第一実施形態と同様に、描画データ生成部及び描画データ取得部は、映像出力線によって接続されている。そして、描画データ生成部は、予め規定された解像度及びレイアウトにて、複数の描画物をプレ合成し、描画データ(プレ合成画像)を生成する。描画データは、映像出力線及び描画データ取得部を通じて、出力生成部に取得される。出力生成部は、記憶装置から読み出され、各RAMに準備された合成利用情報を参照し、描画データの特定位置に描画された各描画物を切り出し、本合成された出力データを生成する。
描画データ又は各描画物の画素にコードを埋め込む場合、コードの保存に使用する画素の態様は、上記実施形態のような最上段の一行でなくてもよい。例えば変形例5では、描画データ又は各描画物の四隅のいずれか一画素が、コードを保存する領域として、使用される。また変形例6では、最上段の一行のうちの一部の画素のみが、コードを保存する領域として使用される。
上記実施形態の変形例7では、AR表示物及び非AR表示物の一方のみが、虚像として表示される。こうした構成では、出力生成部での本合成は、実施されない。変形例7では、姿勢補正設定部にて、姿勢変化情報に基づき、切出基準位置、即ち、AR描画物から出力データに切り出される範囲が設定される。そして、切出基準位置のアドレスから順に、AR描画物の画素データを引き抜きつつ、歪み補正設定部にて設定された歪み補正の内容を適用する処理が、出力生成部(歪み補正回路)にて実施される。尚、複数のAR表示物を表示する出力データが、出力生成部にて生成されてもよい。即ち、「別表示物」は、AR表示物であってもよい。
上記実施形態の変形例8では、反射光学系又はスクリーン等の光学素子の姿勢を変位可能な補正機構が投影ユニットに設けられている。表示制御装置は、補正機構の制御により、光学素子の姿勢を変化させ、重畳対象に対するAR表示物の表示ずれを補正する。こうした変形例8でも、光学素子の姿勢補正の内容を決定したうえで、当該姿勢補正に対応する歪み補正の内容が設定される。
上記第三実施形態の変形例9では、描画基板及びDLP制御基板が一体的に構成されている。その結果、描画データ取得部が省略されたうえで、描画データ生成部及び出力生成部の機能を兼ねた表示生成部が設けられる。表示生成部は、プレ合成処理及び本合成処理の両方を実施可能であり、各描画物及コードを、自ら生成することによって準備する。
上記実施形態では、低周波数帯域の振動を相殺するための補正は、描画データ生成部にて実施されていた。しかし、変形例10のLCD制御基板には、高い演算能力を有する処理部が設けられている。変形例10では、低周波数帯域及び高周波数帯域の両方の帯域の振動が、LCD制御基板によって補正される。このように、処理部の演算能力が十分であれば、実質全ての帯域の振動に対する補正が、LCD制御基板によって実施されてよい。
上記実施形態では、ピッチング、ローリング及びヒーブ等の姿勢変化が補正の対象とされていたが、補正対象とされる姿勢変化は、ピッチングのみであってもよい。尚、ロール変化に対しては、AR描画物から切り出す画像範囲を、AR描画物に対して傾斜させる補正が実施される。また、ヒーブ変化に対しては、AR描画物から切り出す画像範囲を、ピッチ変化と同様に、上下に変位させる補正が実施される。
虚像光を射出するプロジェクタの構成は、上記実施形態の構成に限定されず、適宜変更可能である。例えば、上記第一実施形態の変形例11では、LCD及びバックライトに替えて、EL(Electro Luminescence)パネルが設けられている。さらに、ELパネルに替えて、プラズマディスプレイパネル、ブラウン管及びLED等の表示器を用いたプロジェクタが採用可能である。また、LSM及びDLP等に替えて、LCOS(Liquid Crystal On Silicon)等を用いたプロジェクタが採用されてもよい。
上記実施形態では、表示光像が投影される投影領域は、ウィンドシールドに規定されていた。しかし、表示光像を投影される投影部材(例えばコンバイナ等)が、ウィンドシールドとは別体で設けられていてもよい。
上記第一~第四実施形態の変形例12のLCD制御基板は、一つのメモリ構成のみをRAMとして備えている。変形例12のメモリ構成は、第一メモリ151及び第二メモリ152(図6参照)のうちの一方のみに相当する。こうした変形例12のように、RAMの容量及び読み書きの速度が十分であれば、複数単位のメモリモジュールがバスに接続されていなくてもよい。変形例12では、入力回路及び補正回路による各メモリ構成を反転させるような動作は、実施されない。
さらに、上記第一~第四実施形態の変形例13のLCD制御基板には、変形例12のメモリ構成を三つ以上備えている。各データのアクセス速度が不足する場合、変形例12のように、データバスに多数のメモリ構成が接続されていてもよい。変形例13では、入力回路及び補正回路は、複数のメモリ構成をサイクリックにスイッチングし、データの書き込み及び読み出しを実施する。
上記実施形態の慣性センサは、ジャイロセンサ及び加速度センサを組み合わせた構成であった。しかし、慣性センサの構成は、適宜変更可能である。例えば慣性センサは、ヨー方向、ピッチ方向、ロール方向の各角速度を検出する3軸のジャイロセンサと、車両の前後方向、上下方向、左右方向の各加速度を検出する3軸の加速度センサとを備えた6軸のモーションセンサであってもよい。さらに、慣性センサは、ジャイロセンサ及び加速度センサのうちで、加速度センサのみを備える構成であってもよく、又はジャイロセンサのみを備える構成であってもよい。
上記第一実施形態の変形例14では、姿勢補正を適用する処理が、補正回路154ではなく、入力回路153にて実施される。入力回路153は、姿勢変化情報に基づき、AR描画物DS1のうちで、切出基準位置P1cに基づく画像範囲のみを、第一メモリ151及び第二メモリ152のいずれかに書き込む。
さらに、慣性センサは、HUDに内蔵されたセンサ構成でなくてもよい。慣性センサは、通信バスに接続されずに、フィルタ回路又はLSM制御基板等に直接的に接続された構成であれば、車両に搭載された既存の構成であってもよい。
合成利用情報は、上記第一実施形態のように歪み補正テーブルTBcに含まれていてもよく、上記第二実施形態のようにコードCDとして送信されてもよい。また、歪み補正テーブルTBcは、上記第一実施形態のようなテーブル形式であってもよく、又は1次元的な文字列であってもよい。さらに、コードCDも、上記第五実施形態のようなテーブル形式であってもよく、又は上記第二実施形態のような文字列であってもよい。尚、行及び列に従って情報を2次元配列させたものをテーブルとし、情報が1次元的に並べたものを文字列とする。
描画ECU及び各制御基板に設けられる各機能部の少なくとも一部は、複数の電気素子等を組み合わせてなるハードウェア(電気回路部)によって実現されてもよい。或いは、ソフトウェア及びハードウェアの組み合わせによって実現された各機能部が、描画ECU及び各制御基板に設けられていてもよい。
描画ECU及び各制御基板に設けられた記憶装置には、フラッシュメモリ及びハードディスク等の種々の非遷移的実体的記憶媒体(non-transitory tangible storage medium)が採用可能である。加えて、虚像表示に関連するプログラムを記憶する記憶媒体は、車載された各構成の記憶媒体に限定されず、当該記憶媒体へのコピー元となる光学ディスク及び汎用コンピュータのハードディスクドライブ等であってもよい。
本開示に記載の制御部及びその手法は、コンピュータプログラムにより具体化された一つ乃至は複数の機能を実行するようにプログラムされたプロセッサを構成する専用コンピュータにより、実現されてもよい。あるいは、本開示に記載の装置及びその手法は、専用ハードウェア論理回路により、実現されてもよい。もしくは、本開示に記載の装置及びその手法は、コンピュータプログラムを実行するプロセッサと一つ以上のハードウェア論理回路との組み合わせにより構成された一つ以上の専用コンピュータにより、実現されてもよい。また、コンピュータプログラムは、コンピュータにより実行されるインストラクションとして、コンピュータ読み取り可能な非遷移有形記録媒体に記憶されていてもよい。