JP7012889B2 - 船貨物ランプの位置決めシステム - Google Patents
船貨物ランプの位置決めシステム Download PDFInfo
- Publication number
- JP7012889B2 JP7012889B2 JP2020570007A JP2020570007A JP7012889B2 JP 7012889 B2 JP7012889 B2 JP 7012889B2 JP 2020570007 A JP2020570007 A JP 2020570007A JP 2020570007 A JP2020570007 A JP 2020570007A JP 7012889 B2 JP7012889 B2 JP 7012889B2
- Authority
- JP
- Japan
- Prior art keywords
- lamp
- ramp
- ship
- display
- safety zone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 46
- 238000012545 processing Methods 0.000 claims description 20
- 238000004891 communication Methods 0.000 claims description 10
- 238000003032 molecular docking Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 3
- 238000007405 data analysis Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- QVFWZNCVPCJQOP-UHFFFAOYSA-N chloralodol Chemical compound CC(O)(C)CC(C)OC(O)C(Cl)(Cl)Cl QVFWZNCVPCJQOP-UHFFFAOYSA-N 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/54—Ferries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B27/00—Arrangement of ship-based loading or unloading equipment for cargo or passengers
- B63B27/14—Arrangement of ship-based loading or unloading equipment for cargo or passengers of ramps, gangways or outboard ladders ; Pilot lifts
- B63B27/143—Ramps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/10—Monitoring properties or operating parameters of vessels in operation using sensors, e.g. pressure sensors, strain gauges or accelerometers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/20—Monitoring properties or operating parameters of vessels in operation using models or simulation, e.g. statistical models or stochastic models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G69/00—Auxiliary measures taken, or devices used, in connection with loading or unloading
- B65G69/28—Loading ramps; Loading docks
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01D—CONSTRUCTION OF BRIDGES, ELEVATED ROADWAYS OR VIADUCTS; ASSEMBLY OF BRIDGES
- E01D15/00—Movable or portable bridges; Floating bridges
- E01D15/24—Bridges or similar structures, based on land or on a fixed structure and designed to give access to ships or other floating structures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/937—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of marine craft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/083—Shipping
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/30—Water vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Probability & Statistics with Applications (AREA)
- Business, Economics & Management (AREA)
- Theoretical Computer Science (AREA)
- Electromagnetism (AREA)
- Multimedia (AREA)
- Economics (AREA)
- Architecture (AREA)
- Acoustics & Sound (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Entrepreneurship & Innovation (AREA)
- General Business, Economics & Management (AREA)
- Tourism & Hospitality (AREA)
- Strategic Management (AREA)
- Quality & Reliability (AREA)
- Operations Research (AREA)
- Marketing (AREA)
- Human Resources & Organizations (AREA)
- Development Economics (AREA)
- Ship Loading And Unloading (AREA)
- Traffic Control Systems (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
GSM Global System for Mobile
GPRS General Packet Radio Service
EDGE Enhanced Data rate for Global Evolution
LTE Long Term Evolution
IP Internet Protocol
Claims (22)
- 貨物を船に輸送するための少なくとも1つのランプ(2)を備え、前記ランプ(2)は閉位置と展開位置に設定されるように構成されている、船(1)のランプ位置決めシステム(100)において、前記ランプ位置決めシステム(100)は、
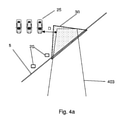
前記ランプ(2)の実際のランディングエリアの安全ゾーン(30)および前記船(1)の少なくとも1つの基準位置のビューを有するように取り付けられ、前記安全ゾーン(30)の表示を構築するデータを提供するように構成された少なくとも1つのセンサ(10)を備え、前記安全ゾーン(30)のサイズは前記ランプの寸法に距離Dを加えた寸法に設定され、
少なくとも1つのプロセッサ(101)、該プロセッサによって実行可能な命令セットを格納するように構成された少なくとも1つのメモリ(102)、および少なくとも1つのセンサインタフェース(103)を含む処理回路(50)を備え、前記少なくとも1つのプロセッサ(101)が、前記命令セットを実行して、
前記少なくとも1つのセンサ(10)から前記センサインタフェースを介してセンサデータを取得し、
前記センサデータを使用して前記安全ゾーン(30)の表示を構築し、
前記ランプの展開時に前記ランプの位置を予測するために、前記ランプのモデルを提供し、前記ランプのモデルの位置を前記安全ゾーン(30)の表示と比較するように構成されている、
ことを特徴とする、ランプ位置決めシステム。 - 前記距離Dは所望の安全距離およびモデル較正の精度に依存する、請求項1に記載のシステム。
- 前記モデルは、前記ランプの少なくとも2つの基準位置(401,402)、前記ランプの輪郭(403)、または位置と輪郭の組み合わせを含む、請求項1または2に記載のシステム。
- 前記少なくとの1つのセンサは、少なくとも1つのカメラ(10)を含む、請求項1-3のいずれか一項に記載のシステム。
- 前記少なくとも1つのカメラは、前記ランプ(2)の中心線と整列配置されるか、前記ランプの側面に配置されるか、またはランプの中心と側面の組み合わせで配置され、前記少なくとも1つのカメラに前記安全ゾーン(30)のクリアなビューが提供される、請求項4に記載のシステム。
- 前記少なくとも1つのカメラはステレオスコピックカメラである、請求項4-5のいずれか一項に記載のシステム。
- 前記少なくとも1つのプロセッサ(101)はさらに、通信インタフェース(105)を使用して、前記ランプ(2)の展開を制御するための、またはドッキング時の船(1)の動きを制御するための制御パラメータを送信するように構成されている、請求項1-6のいずれか一項に記載のシステム。
- 前記ランプ位置決めシステム(100)はさらに、表示装置(11)を備え、前記安全ゾーン(30)の表示が前記ランプ(2)のモデル(403)と共に前記表示装置にオーバーレイ表示される、請求項1-7のいずれか一項に記載のシステム。
- 貨物を輸送するための少なくとも1つのランプ(2)を備え、前記ランプ(2)は閉位置および展開位置に設定されるように構成され、前記ランプ(2)の安全ゾーン(30)および船(1)の少なくとも1つの基準位置のビューを有するように取り付けられた少なくとも1つのセンサ(10)を備え、前記センサが前記安全ゾーン(30)の表示を構築するデータを提供するように構成されている、前記船(1)のランプ位置決めシステムの方法であって、前記方法は、
前記少なくとも1つのセンサ(10)から取得されたセンサデータをキャプチャするステップ(501)と、
前記センサデータを使用して前記安全ゾーン(30)の表示を構築するステップ(502)と、
ランプの展開時に前記安全ゾーン(30)内の前記ランプの位置を予測するために前記ランプ(2)のモデル(403)を提供するステップ(503)と、
前記モデルの位置を前記安全ゾーン(30)の表示と比較するステップ(504)と、を含む、方法。 - 前記ランプ位置決めシステム(100)はさらに表示装置(11)を備え、前記方法はさらに、
前記安全ゾーン(30)の表示の画像(12)を前記ランプ(2)のモデル(403)と共に前記表示装置(11)にオーバーレイ表示するステップ(505)、
を含む、請求項9に記載の方法。 - 前記センサデータは、少なくとも1つのカメラ(10)からの少なくとも1つの画像を含む、請求項10に記載の方法。
- 前記表示内の物体(5,20,25)を識別するために前記表示にデータ処理を行うステップをさらに含む、請求項9-11のいずれか一項に記載の方法。
- 検出した物体(25)の位置を前記モデル(403)の位置と比較し、検出した物体(25)が前記安全ゾーン(30)の所定の距離(D)内に位置する場合には、衝突の指示を送るステップを含む、請求項9-12のいずれか一項に記載の方法。
- 衝突の指示がある場合には、前記ランプがその展開位置へ下降できないように前記ランプをロックするステップを含む、請求項13に記載の方法。
- 前記ランプの上部貨物積込み位置および下部貨物積込み位置の少なくとも1つを推定するステップをさらに含む、請求項9-14のいずれか一項に記載の方法。
- 前記ランプがその展開位置に下げられたとき、
前記ランプ(2)の少なくとも1つの所定の基準位置(401,402)をセンサデータから決定し、
前記モデル(403)の少なくとも1つの基準位置が前記ランプ(2)の前記少なくとも1つの所定の基準位置に一致するように前記表示内の前記モデル(403)を位置決めするステップを含む、請求項9-15のいずれか一項に記載の方法。 - 前記ランプ位置決めシステム(100)は船制御システムに接続され、前記方法はさらに、少なくとも前記ランプ(2)、埠頭(5)、および前記埠頭(5)上で認識される障害物(20,25)の投影位置に依存して、前記船を係留位置に制御するステップを含む、請求項9-16のいずれか一項に記載の方法。
- 前記ランプがその展開位置にあるとき、前記ランプ(2)を横切って移動する貨物品(25)を検出するステップをさらに含む、請求項9-17のいずれか一項に記載の方法。
- 前記方法は、前記ランプ(2)を横切って移動する貨物品(25)をカウントするステップをさらに含む、請求項18に記載の方法。
- 前記ランプ(2)を横切って移動する貨物品(25)に応じて、積載スペースの利用可能性を計算するステップをさらに含む、請求項18-19のいずれか一項に記載の方法。
- 前記ランプ(2)のランディングエリアの周囲に安全ゾーン(30)を設定するステップをさらに備える、請求項9-20のいずれか一項に記載の方法。
- 埠頭(5)に展開されて貨物を輸送するためのランプ(2)と、請求項1-8のいずれか一項に記載のランプ位置決めシステム(100)とを備えた船(1)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE1850772A SE543087C2 (en) | 2018-06-21 | 2018-06-21 | Ship cargo ramp positioning system |
| SE1850772-3 | 2018-06-21 | ||
| PCT/SE2019/050588 WO2019245440A1 (en) | 2018-06-21 | 2019-06-19 | Ship cargo ramp positioning system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021522107A JP2021522107A (ja) | 2021-08-30 |
| JP7012889B2 true JP7012889B2 (ja) | 2022-01-28 |
Family
ID=67070899
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020570007A Active JP7012889B2 (ja) | 2018-06-21 | 2019-06-19 | 船貨物ランプの位置決めシステム |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3810501B1 (ja) |
| JP (1) | JP7012889B2 (ja) |
| KR (1) | KR102363148B1 (ja) |
| CN (1) | CN112512913B (ja) |
| SE (1) | SE543087C2 (ja) |
| WO (1) | WO2019245440A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102680375B1 (ko) * | 2022-01-27 | 2024-07-01 | 국립한국해양대학교산학협력단 | 레이저를 이용한 자동차 운반선 램프 위치결정 시스템 |
| KR102491671B1 (ko) | 2022-09-01 | 2023-01-27 | 엘케이시스(주) | 진입 램프 인식을 위한 탈부착형 랜드마크 세트 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001253386A (ja) | 2000-03-09 | 2001-09-18 | Sumitomo Heavy Ind Ltd | 自動車運搬船における自動車積込み誘導装置 |
| US20130180442A1 (en) | 2010-07-12 | 2013-07-18 | Einar Pedersen | System for handling cargo |
| US20160001701A1 (en) | 2014-07-03 | 2016-01-07 | Topcon Positioning Systems, Inc. | Machine Safety Dome |
| JP2018503913A (ja) | 2015-01-15 | 2018-02-08 | 江▲蘇▼南大五▲維▼▲電▼子科技有限公司 | 船舶補助ドッキング方法およびシステム |
| CN207360527U (zh) | 2017-07-11 | 2018-05-15 | 苏州瀚隆石化装备有限公司 | 一种新型智能登船梯 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US384686A (en) | 1888-06-19 | Herman guels | ||
| FR2231597B2 (ja) * | 1972-06-28 | 1977-12-23 | Mac Gregor Comarain Sa | |
| GB2022517B (en) * | 1978-05-31 | 1982-06-23 | Cargospeed Equip | Ferry vessel provided with a ramp |
| SU1036617A1 (ru) * | 1982-03-22 | 1983-08-23 | Предприятие П/Я М-5261 | Судно с горизонтальным способом грузообработки |
| JPH0798513B2 (ja) * | 1987-03-19 | 1995-10-25 | 石川島播磨重工業株式会社 | 重量物運搬船 |
| CN2036932U (zh) * | 1988-11-04 | 1989-05-03 | 江苏省扬州市江扬船舶修造厂 | 汽车渡轮的曲面跳板 |
| DE3907376A1 (de) * | 1989-03-08 | 1990-09-13 | Man Technologie Gmbh | Vorrichtung zum beladen von raeumen mit gegenstaenden unterschiedlicher dimensionen |
| KR101130939B1 (ko) * | 2003-05-19 | 2012-03-29 | 애프로그 아이엔씨. | 자율 항행 화물 컨테이너 시스템 |
| WO2006121342A1 (en) * | 2005-05-09 | 2006-11-16 | Umoe Mandal As | Transfer of wheeled objects |
| SE0702417L (sv) * | 2007-10-31 | 2009-05-01 | Tts Ships Equipment Ab | Anordning vid lastfartyg |
| SE533362C2 (sv) * | 2008-06-02 | 2010-09-07 | Tts Ships Equipment Ab | Anordning vid delad fartygsramp |
| JP2010143256A (ja) * | 2008-12-16 | 2010-07-01 | Mitsui Miike Mach Co Ltd | ばら物運搬船の陸揚げ時における船体の位置調整システム |
| EP2305554B1 (en) * | 2009-09-23 | 2014-04-23 | ABB Oy | Method and arrangement for operating a ship ramp |
| US8531523B2 (en) * | 2009-12-08 | 2013-09-10 | Trueposition, Inc. | Multi-sensor location and identification |
| IL235477B (en) * | 2014-11-03 | 2019-06-30 | Israel Aerospace Ind Ltd | A computerized system and method for providing delivery services of objects |
| NO337449B1 (no) * | 2014-12-18 | 2016-04-18 | Marine Aluminium As | Styringssystem og framgangsmåte for landing av et endeparti av et fritt utragende, langstrakt element, samt anvendelse av en bildeprosessor til generering av styringsparametere for styre-systemet |
| CN107682422A (zh) * | 2017-09-22 | 2018-02-09 | 武汉航科物流有限公司 | 码头船舶状态识别方法、装置及系统 |
-
2018
- 2018-06-21 SE SE1850772A patent/SE543087C2/en not_active IP Right Cessation
-
2019
- 2019-06-19 KR KR1020217000096A patent/KR102363148B1/ko active IP Right Grant
- 2019-06-19 CN CN201980044703.5A patent/CN112512913B/zh active Active
- 2019-06-19 JP JP2020570007A patent/JP7012889B2/ja active Active
- 2019-06-19 WO PCT/SE2019/050588 patent/WO2019245440A1/en active Application Filing
- 2019-06-19 EP EP19733897.3A patent/EP3810501B1/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001253386A (ja) | 2000-03-09 | 2001-09-18 | Sumitomo Heavy Ind Ltd | 自動車運搬船における自動車積込み誘導装置 |
| US20130180442A1 (en) | 2010-07-12 | 2013-07-18 | Einar Pedersen | System for handling cargo |
| US20160001701A1 (en) | 2014-07-03 | 2016-01-07 | Topcon Positioning Systems, Inc. | Machine Safety Dome |
| JP2018503913A (ja) | 2015-01-15 | 2018-02-08 | 江▲蘇▼南大五▲維▼▲電▼子科技有限公司 | 船舶補助ドッキング方法およびシステム |
| CN207360527U (zh) | 2017-07-11 | 2018-05-15 | 苏州瀚隆石化装备有限公司 | 一种新型智能登船梯 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210040353A (ko) | 2021-04-13 |
| CN112512913B (zh) | 2022-07-08 |
| SE1850772A1 (en) | 2019-12-22 |
| EP3810501A1 (en) | 2021-04-28 |
| SE543087C2 (en) | 2020-10-06 |
| EP3810501B1 (en) | 2021-12-01 |
| KR102363148B1 (ko) | 2022-02-15 |
| JP2021522107A (ja) | 2021-08-30 |
| WO2019245440A1 (en) | 2019-12-26 |
| CN112512913A (zh) | 2021-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106794971B (zh) | 通过负载处理装备的负载运输 | |
| JP7012889B2 (ja) | 船貨物ランプの位置決めシステム | |
| US11430148B2 (en) | Apparatus and method for pallet volume dimensioning through 3D vision capable unmanned aerial vehicles (UAV) | |
| CN105431370A (zh) | 用于使用集装箱起重机将集装箱自动地卸货在卸货目标上的方法和系统 | |
| GB2550112B (en) | Method of verifying a potential detection of a man overboard event and alert verification processing apparatus | |
| US11941579B2 (en) | Autonomous vehicles performing inventory management | |
| CN109071187A (zh) | 用于机器的安全系统 | |
| EP3644250A1 (en) | Apparatus and method for verifying a shipping load | |
| JP6481178B2 (ja) | クレーンの遠隔運転方法及びクレーンの遠隔運転装置 | |
| JP2018188299A (ja) | コンテナターミナルシステムとその制御方法 | |
| CN110891893A (zh) | 用于支持集装箱起重机的远程控制的修改的视频流 | |
| US10697757B2 (en) | Container auto-dimensioning | |
| JP2019167221A (ja) | クライミングクレーンの制御方法、建築物施工方法及びクライミングクレーン用吊荷判別プログラム | |
| US11946796B2 (en) | Container load quality monitoring and feedback system | |
| US20190127148A1 (en) | System and Methods for Automated Storage Receptacle Processing | |
| US20230112116A1 (en) | Container Load Performance Metric Aggregation | |
| US20190199999A1 (en) | Systems and methods for detecting if package walls are beyond 3d depth camera range in commercial trailer loading | |
| JP2016193778A (ja) | クレーンの運転支援方法及びクレーンの運転支援装置 | |
| GB2623451A (en) | Method and system for aircraft ground movement collision avoidance | |
| KR102499279B1 (ko) | 트레일러의 승,하역 위치결정 시스템 | |
| KR102275723B1 (ko) | 안전사고위험 알림 방법 및 장치 | |
| JP6726043B2 (ja) | 物体検出センサ及び監視システム | |
| JP2022016902A (ja) | 人検知装置、産業車両、及び人検知方法 | |
| KR20230104803A (ko) | 레이더 영상 기반 객체 인식 방법 및 이를 수행하는 장치 | |
| GB2563321A (en) | Method of configuring a radar track analyser and configuration apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20210119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210210 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211005 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211221 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7012889 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |