JP6984007B2 - 回転式深度停止デバイスを備えたmriガイドの生検デバイス - Google Patents
回転式深度停止デバイスを備えたmriガイドの生検デバイス Download PDFInfo
- Publication number
- JP6984007B2 JP6984007B2 JP2020516723A JP2020516723A JP6984007B2 JP 6984007 B2 JP6984007 B2 JP 6984007B2 JP 2020516723 A JP2020516723 A JP 2020516723A JP 2020516723 A JP2020516723 A JP 2020516723A JP 6984007 B2 JP6984007 B2 JP 6984007B2
- Authority
- JP
- Japan
- Prior art keywords
- cannula
- depth stop
- pair
- channel
- blades
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001574 biopsy Methods 0.000 title claims description 106
- 230000008685 targeting Effects 0.000 claims description 43
- 239000000463 material Substances 0.000 claims description 38
- 238000013519 translation Methods 0.000 claims description 29
- 210000000481 breast Anatomy 0.000 claims description 22
- 229920001971 elastomer Polymers 0.000 claims description 4
- 239000000806 elastomer Substances 0.000 claims description 4
- 230000002457 bidirectional effect Effects 0.000 claims description 3
- 238000003780 insertion Methods 0.000 description 16
- 230000037431 insertion Effects 0.000 description 16
- 238000002595 magnetic resonance imaging Methods 0.000 description 16
- 238000000034 method Methods 0.000 description 16
- 239000000523 sample Substances 0.000 description 16
- 230000007704 transition Effects 0.000 description 13
- 230000004807 localization Effects 0.000 description 8
- 210000000038 chest Anatomy 0.000 description 7
- 230000000007 visual effect Effects 0.000 description 7
- 230000003993 interaction Effects 0.000 description 6
- 239000007779 soft material Substances 0.000 description 6
- 239000000758 substrate Substances 0.000 description 6
- 239000000919 ceramic Substances 0.000 description 5
- 239000013536 elastomeric material Substances 0.000 description 5
- 239000012530 fluid Substances 0.000 description 4
- 210000003813 thumb Anatomy 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000003902 lesion Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 238000007789 sealing Methods 0.000 description 3
- 241000473391 Archosargus rhomboidalis Species 0.000 description 2
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000003032 molecular docking Methods 0.000 description 2
- 230000000149 penetrating effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 241000272525 Anas platyrhynchos Species 0.000 description 1
- 241001631457 Cannula Species 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000010809 targeting technique Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/0266—Pointed or sharp biopsy instruments means for severing sample
- A61B10/0275—Pointed or sharp biopsy instruments means for severing sample with sample notch, e.g. on the side of inner stylet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/0041—Detection of breast cancer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/0283—Pointed or sharp biopsy instruments with vacuum aspiration, e.g. caused by retractable plunger or by connected syringe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/14—Fixators for body parts, e.g. skull clamps; Constructional details of fixators, e.g. pins
- A61B90/17—Fixators for body parts, e.g. skull clamps; Constructional details of fixators, e.g. pins for soft tissue, e.g. breast-holding devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/285—Invasive instruments, e.g. catheters or biopsy needles, specially adapted for tracking, guiding or visualization by NMR
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3494—Trocars; Puncturing needles with safety means for protection against accidental cutting or pricking, e.g. limiting insertion depth, pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Instruments for taking body samples for diagnostic purposes; Other methods or instruments for diagnosis, e.g. for vaccination diagnosis, sex determination or ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B2010/0208—Biopsy devices with actuators, e.g. with triggered spring mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
- A61B2017/3411—Needle locating or guiding means using mechanical guide means with a plurality of holes, e.g. holes in matrix arrangement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/062—Measuring instruments not otherwise provided for penetration depth
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
- A61B2090/0811—Indication means for the position of a particular part of an instrument with respect to the rest of the instrument, e.g. position of the anvil of a stapling instrument
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Oncology (AREA)
- Physics & Mathematics (AREA)
- Neurosurgery (AREA)
- Gynecology & Obstetrics (AREA)
- Radiology & Medical Imaging (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Surgical Instruments (AREA)
Description
本願は、2017年9月20日に出願された「MRI Guided Biopsy Device with Rotating Depth Stop Device」と題する米国仮特許出願第62/560,771号の優先権を主張する。その開示は参照により本明細書に組み込まれる。
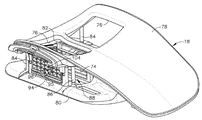
図1〜図3では、MRI適合生検システム(10)は、その強い磁場及び/または高感度無線周波数(RF)信号検出アンテナとの有害な相互作用を軽減するために、MRI機(図示せず)を含有する遮蔽室の外側に設置され得る、または、少なくとも、離間され得る、制御モジュール(12)を有する。米国特許第6,752,768号(全体として参照により本明細書によって組み込まれる)に説明されるように、事前にプログラムされた機能の範囲は、組織サンプルを取ることを補助する制御モジュール(12)に組み込まれ得る。制御モジュール(12)は、定位アセンブリ(15)と共に使用される生検デバイス(14)を制御及び電力供給する。生検デバイス(14)は、MRIまたは他の撮像機械の構台(図示せず)に設置され得るブレストコイル(18)に取り付けられた定位具(16)によって位置付けられ、及び誘導される。
定位フレームワーク(68)の左平行上部ガイド(64)及び右平行上部ガイド(66)は、ブレストコイル(18)の患者支持プラットフォーム(78)の中に形成された選択されたブレストアパチャ(76)の下側(74)に、及びその各側に取り付けられる左平行上部トラック(70)及び右平行上部トラック(72)の内部で、各々、横方向に調整可能に受容される。ブレストコイル(18)の基部(80)は、ブレストアパチャ(76)の間の患者支持プラットフォーム(78)に取り付けられる中心線柱(82)によって接続される。また、各々のブレストアパチャ(76)の周りに離間するような各側の一対の外側垂直支持柱(84、86)は、各々、定位具(16)が内部に存在する横凹部(88)を画定する。
図1に示されるように、生検デバイス(14)の1つの形態は、ホルスタ(32)及びプローブ(91)を備え得る。例示的なホルスタ部(32)は、制御モジュール(12)を扱う上記のセクションで前に説明されている。以下の段落は、さらに詳細に、プローブ(91)と、関連構成要素及び関連デバイスとを説明する。
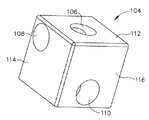
いくつかの形態では、ガイドキューブは、1つ以上の縁及び面によって画定される本体を備え得る。本体は、1つ以上のガイド孔または他の種類の通路を備えてもよく、このガイド孔または他の種類の通路は、ガイドキューブの面の間を延在し、生検デバイス(14)または生検デバイス(14)の一部(例えば、生検デバイス(14)の針(90)、カニューレ(94)及びオブチュレータ(92)の組み合わせ等)等の器具を誘導するように使用され得る。ガイドキューブは、1軸、2軸、または3軸を中心に回転可能であり、ガイドキューブの1つ以上のガイド孔またはガイド通路を所望の位置に位置付け得る。
場合によっては、深度停止デバイスをカニューレと係合させて患者の乳房内を貫く深さを制御する単純な機械的手段を設けることを望ましい場合がある。上記の深度停止デバイス(95)等の一部の深度停止デバイスでは、操作者は、カニューレ(94)に係合するために、デバイスを所定の方向に回転させて、深度停止デバイス(95)をカニューレ(94)に対してロックし、続いてロック解除することについて制限されている。しかし、一部の生検の処置で、深度停止デバイス(95)及び/またはカニューレ(94)を取り巻くさまざまな機器が、深度停止デバイス(95)を一方向に回転させる際に困難を呈する場合がある。そのため、デバイスをいずれかの方向に回転させることにより、カニューレ(94)と係合し、ロック状態とロック解除状態との間を移行できる深度停止デバイスを供給することが望ましい場合がある。これは、生検処置間における深度停止デバイスの効果的な使用を簡素化及び迅速化するのに有益であり得る。さらに、深度停止デバイスは、デバイスが確実にロックされた状態まで十分に回転したときに示す触覚型フィードバックを操作者に提示することが望ましい場合がある。これは、深度停止デバイスがカニューレ(94)にしっかりと固定されていることを操作者が双方向で確認することを実現し、それによって深度停止デバイスとカニューレ(94)がゆるく係合している状態を維持する事例を最小限に抑えるのに有益であり得る。
以下の実施例は、本明細書の教示を組み合わせ、または適用し得るさまざまな非網羅的な方法に関する。以下の実施例は、本願では、または本願に後続する出願では、いつでも提示され得る任意の「特許請求の範囲」の適用範囲を限定することを意図してはいないことを理解されたい。免責事項は意図されていない。以下の実施例は、単に例示を目的としたものにすぎないものとして提供される。本明細書のさまざまな教示は、他の多くの方法で配置及び適用され得ることが想到される。また、いくつかの変形例は、下記の実施例で言及される特定の特徴を省略し得ることが想到される。したがって、後で発明者によって、または対象となる発明者の後継者等によって、別段に明白に示されていない限り、下記に言及される態様または特徴のいずれも重大なものとみなすべきではない。下記に言及するものを越える追加の特徴を含む、本願に、または本願に関連する後続の出願に、いずれかの「特許請求の範囲」が提示された場合、それらの追加の特徴は、特許性に関連する何らかの理由で追加されたものと推定するものではない。
生検器具とともに使用する装置であって、(a)前記生検器具のカニューレを受容するサイズ及び形状のチャネルを画定するハウジングであって、回転するとロック解除状態からロック状態に移行するべく前記ハウジングが動作可能であるように選択的に回転可能に構成される前記ハウジング、(b)前記ハウジングから前記チャネル内に内向きに延びる少なくとも2つのランプであって、前記ハウジングが選択的に回転するときに前記カニューレに当接するように構成されてそれによって触覚型フィードバックを生成する、前記少なくとも2つのランプ、及び(c)前記ハウジングから前記チャネルに内向きに延びる少なくとも2つのブレードであって、前記2つのブレードが前記ハウジングの前記選択的な回転時に前記カニューレと係合するように構成され、前記ハウジングは、前記ハウジングが前記ロック状態にあるとき、前記チャネルを通る前記カニューレの挿入の前記深さを制限するように構成されている前記少なくとも2つのブレードを含む装置。
前記ハウジングが、時計回りの方向または反時計回りの方向に選択的に回転可能に構成され、前記ハウジングがいずれかの方向に回転すると前記ロック解除状態から前記ロック状態に移行するよう動作可能である、実施例1に記載の装置。
前記ハウジングが、前記時計回りの方向または反時計回りの方向に選択的に回転すると、前記ロック解除状態から前記ロック状態に移行するよう動作可能である、実施例2に記載の装置。
前記ロック解除状態の前記ハウジングは、平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直である、実施例1〜3のいずれか1つ以上に記載の装置。
前記ロック状態の前記ハウジングは、前記平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を防ぐように構成される、実施例4に記載の装置。
前記ハウジングが、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成される、実施例1〜5のいずれか1つ以上に記載の装置。
前記少なくとも2つのブレードは、前記後部開口部に隣接する前記チャネル内に延びる、実施例6に記載の装置。
前記少なくとも2つのランプが前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と後部開口部の間の前記チャネルに沿って延びる、実施例7に記載の装置。
前記ハウジングが、前記ロック解除状態から前記ロック状態に前記ハウジングを移行するよう選択的に操作されよう構成される一対のグリップ側部を含む、実施例8に記載の装置。
前記チャネルは、前記カニューレの外形に対応する形状を画定する、実施例1〜9のいずれか1つ以上に記載の装置。
前記チャネルの前記形状が前記カニューレの楕円形の断面に対応する楕円形である、前記例10に記載の装置。
前記少なくとも2つのランプが前記ハウジングと単一構造で一体である、実施例1〜11のいずれか1つ以上に記載の装置。
前記少なくとも2つのブレードが前記ハウジングと単一構造で一体である、実施例1〜12のいずれか1つ以上に記載の装置。
前記少なくとも2つのブレードがエラストマー材料で形成され、前記ハウジングが選択的に回転して前記ロック状態になると、前記少なくとも2つのブレードが変形するように構成される、実施例1〜13のいずれか1つ以上に記載の装置。
前記少なくとも2つのブレードは、前記ハウジングが選択的に前記ロック状態に回転されると、前記カニューレを変形させるように構成される、実施例1〜14のいずれか1つ以上に記載の装置。
前記ハウジングが第1の視覚的識別子をさらに含む、実施例1〜15のいずれか1つ以上に記載の装置。
前記第1の視覚的識別子は、前記ハウジングを前記ロック解除状態から前記ロック状態に交換可能に移行させる前記回転方向を示すように構成される、実施例16に記載の装置。
前記ハウジングが第2の視覚的識別子をさらに含む、実施例6または16に記載の装置。
前記第2の視覚的識別子は、前記前部開口部が前記カニューレを摺動可能に受容するように構成されるように、前記後部開口部から前記前部開口部を識別するように構成される、実施例18に記載の装置。
前記ハウジングは、MRI患者固定具に関連付けられたガイドキューブに当接し、それにより、患者に対する前記ハウジングの軸方向の動きを止めるように構成される、実施例1〜19のいずれか1つ以上に記載の装置。
患者支持面に支えられた患者の乳房の中にターゲティングスリーブを誘導するための装置であって、(a)前記ターゲティングスリーブを摺動可能に受容するサイズ及び構成のスリーブ開口部を規定するハウジングであって、前記スリーブ開口部に受容されたターゲティングスリーブに対する回転を通じて前記ターゲティングスリーブにしっかりと取り付けられるように構成される前記ハウジング、(b)スリーブ開口部に延び、前記ハウジングが回転すると前記ターゲティングスリーブと係合するように構成されたランプであって、前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるように構成され、前記ターゲティングスリーブを使用する際の操作者へ触覚型フィードバックを生成するように構成される前記ランプ、及び(c)前記スリーブ開口部に延び、前記ハウジングが回転するときに前記ターゲティングスリーブと係合するように構成され、それにより前記ハウジングを前記ターゲティングスリーブにしっかりと取り付ける前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるよう構成される前記ブレードを含む、前記装置。
生検器具とともに使用する装置であって、(a)前記生検器具のカニューレを受容するサイズ及び形状のチャネルを画定するハウジングであって、ロック解除状態からロック状態に前記ハウジングを移行する第1の方向に選択的に回転するように構成され、前記ロック状態から前記ロック解除状態に前記ハウジングを移行する第2の方向に選択的に回転するようにさらに構成され、前記第2の方向は前記第1の方向と反対であり、前記ハウジングが前記ロック状態にあるとき、前記ハウジングが前記チャネルを通る前記カニューレの挿入の前記深さを制限するように、前記ハウジングの選択的回転時に前記カニューレと係合するように構成される前記ハウジング、(b)前記ハウジングに沿って配置された方向識別子であって、前記チャネルに前記カニューレを受容するためのカニューレに対する前記ハウジングの適切な方向を示すように構成される前記方向識別子、及び(c)前記ハウジングに沿って配置されたロック識別子であり、前記ハウジングを前記ロック解除状態から前記ロック状態に移行させるための前記カニューレに対する前記第1及び第2の方向を示すように構成される前記ロック識別子を含む前記装置。
ターゲッティングカニューレとともに使用するためのデバイスを位置合わせする方法であって、前記デバイスは、受容チャネル、少なくとも2つのランプ、及び前記受容チャネル内に延びる少なくとも2つのブレードを含み、(a)前記受容チャネルから前記ターゲッティングカニューレを挿入すること、(b)前記ターゲッティングカニューレに対して前記デバイスを配置して、前記デバイスを所定の深さの挿入に対応する前記ターゲッティングカニューレの位置に位置合わせすること、(c)前記少なくとも2つのブレードの前記カニューレとの前記係合を通して前記カニューレの上に前記デバイスをロックするために、前記カニューレに対して時計回りまたは反時計回りの方向に前記デバイスを約90度回転させること、(d)前記デバイスを回転させるときに、前記少なくとも2つのランプと前記カニューレとの前記相互作用によって触覚型フィードバックを生成すること、(e)前記カニューレに対して前記少なくとも2つのブレードを前記外すことにより前記カニューレから前記デバイスをロック解除するために、前記カニューレに対して前記時計回りまたは反時計回りの方向に前記デバイスを約90度回転させること、及び(f)前記デバイスを回転させるときに、前記少なくとも2つのランプと前記カニューレとの前記相互作用によって触覚型フィードバックを生成することを含む前記方法。
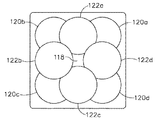
生検器具で使用するための双方向深度停止部であって、前記生検器具に関連付けられたカニューレを受容するサイズのチャネルを画定する本体であって、前記チャネルが、対向する凹面の第1の対と対向する凹面の第2の対を含み、前記対向する凹面の第1の対と第2の対が、重ね合わされた双楕円形の断面を共に形成する前記本体、及び対向する凹面の前記第1の対の凹面の中に各ブレードが内向きに突出し、各ブレードが他方のブレードに対して前記本体の反対側にあるようにする前記2つのブレードを含む前記深度停止部。
前記本体が、前記カニューレに対して時計回りの方向または反時計回りの方向に選択的に回転可能に構成され、前記本体がいずれかの方向に回転するとロック解除状態からロック状態に移行するよう動作可能である、実施例24に記載の深度停止部。
対向する凹面の前記第1の対及び第2の対が相互接続されて、各凹面の交差部にリブを形成する、実施例24または25に記載の深度停止部。
前記ロック解除状態の前記本体は、平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直である、実施例24〜26のいずれか1つ以上に記載の深度停止部。
前記ロック解除状態の前記本体は、平行移動軸に沿って前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直であり、前記ロック状態の前記本体は、前記平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を防ぐように構成されている、実施例24〜26のいずれか1つ以上に記載の深度停止部。
前記本体が、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成される、実施例24〜28のいずれか1つ以上に記載の深度停止部。
前記ハウジングは、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、前記2つのブレードは、前記後部開口部に隣接する前記チャネル内に延びる、実施例24〜28のいずれか1つ以上に記載の深度停止部。
前記本体は、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と前記後部開口部の間の前記チャネルに沿って延びる、実施例24に記載の深度停止部。
前記本体が、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが、前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と前記後部開口部の間の前記チャネルに沿って延び、前記本体は、前記ハウジングを前記ロック解除状態から前記ロック状態に移行させるように選択的に操作されるように構成された一対のグリップ側部を含む、実施例24に記載の深度停止部。
前記2つのブレードの間に配置された少なくとも2つのランプをさらに備え、前記少なくとも2つのランプ及び前記少なくとも2つのブレードは前記本体と単一構造であり、一体である、実施例24に記載の深度停止部。
前記2つのブレードがエラストマー材料で形成され、前記本体が選択的に回転してロック状態になると、前記2つのブレードが変形するように構成される、実施例24〜33のいずれか1つ以上に記載の深度停止部。
前記2つのブレードは、前記本体が選択的に回転してロック状態になったときに前記カニューレを変形させるように構成され、前記2つのブレードが剛性の材料で形成される、実施例24〜33のいずれか1つ以上に記載の深度停止部。
参照により本明細書に全体的または部分的に組み込まれると言及しているいずれかの特許、刊行物、または他の開示の資料は、組み込まれた資料が既存の定義、声明、または本開示に記載している他の開示の資料と矛盾しない範囲までのみ、本明細書に組み込まれることを認識されたい。したがって、また必要な範囲まで、本明細書に明確に記載されている開示は、参照により本明細書に組み込まれたいかなる矛盾する資料よりも優先される。参照により本明細書に組み入れられると言及されているが、本明細書に記載されている既存の定義、声明、または他の開示の資料と矛盾する任意の資料、またはその一部は、その組み込まれた資料と既存の開示の資料との間に矛盾が生じない範囲までのみ組み込まれる。
(1) 生検器具で使用するための双方向深度停止部であって、
(a)前記生検器具に関連付けられたカニューレを受容するサイズのチャネルを画定する本体であって、前記チャネルが、対向する凹面の第1の対と対向する凹面の第2の対を含み、前記対向する凹面の第1の対と第2の対が、重ね合わされた双楕円形の断面を共に形成する前記本体と、
(b)前記本体の反対側に配置されるように、各ブレードが対向する凹面の前記第1の対の凹面に内向きに突出する一対のブレードと、
を備える前記深度停止部。
(2) 前記本体が、前記カニューレに対して時計回りの方向または反時計回りの方向に選択的に回転可能に構成され、前記本体がいずれかの方向に回転するとロック解除状態からロック状態に移行するよう動作可能である、実施態様1に記載の深度停止部。
(3) 対向する凹面の前記第1の対及び第2の対が相互接続されて、各凹面の交差部にリブを形成する、実施態様1に記載の深度停止部。
(4) 前記ロック解除状態の前記本体は、平行移動軸に沿って前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直である、実施態様1に記載の深度停止部。
(5) 前記ロック解除状態の前記本体は、平行移動軸に沿って前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直であり、前記ロック状態の前記本体は、前記平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を防ぐように構成されている、実施態様1に記載の深度停止部。
(7) ハウジングは、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、前記一対のブレードは、前記後部開口部に隣接する前記チャネル内に延びる、実施態様1に記載の深度停止部。
(8) 前記本体は、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と後部開口部の間の前記チャネルに沿って延びる、実施態様1に記載の深度停止部。
(9) 前記本体が、前部開口部及び後部開口部を含み、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが、前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と後部開口部との間の前記チャネルに沿って延び、前記本体は、前記ハウジングを前記ロック解除状態から前記ロック状態に移行させるように選択的に操作されるように構成された一対のグリップ側部を含む、実施態様1に記載の深度停止部。
(10) 前記チャネルは、前記カニューレの外形に対応する形状を画定する、実施態様1に記載の深度停止部。
(12) 前記本体と単一構造で一体の少なくとも2つのランプをさらに備える、実施態様1に記載の深度停止部。
(13) 前記一対のブレードの間に配置された少なくとも2つのランプをさらに備え、前記少なくとも2つのランプ及び前記少なくとも一対のブレードは前記本体と単一構造であり、一体である、実施態様1に記載の深度停止部。
(14) 前記一対のブレードがエラストマー材料で形成され、前記本体が選択的に回転してロック状態になると、前記一対のブレードが変形するように構成される、実施態様1に記載の深度停止部。
(15) 前記一対のブレードは、前記本体が選択的に回転してロック状態になったときに前記カニューレを変形させるように構成され、前記一対のブレードが剛性の材料で形成される、実施態様1に記載の深度停止部。
(a)前記ターゲティングスリーブを摺動可能に受容するサイズ及び構成のスリーブ開口部を画定するハウジングであって、前記スリーブ開口部に受容された前記ターゲティングスリーブに対する回転を通じて前記ターゲティングスリーブにしっかりと取り付けられるように構成される前記ハウジングと、
(b)前記スリーブ開口部に延び、前記ハウジングが回転すると前記ターゲティングスリーブと係合するように構成されたランプであって、前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるよう構成され、前記ターゲティングスリーブを係合する際、操作者へ触覚型フィードバックを生成するように構成される前記ランプと、
(c)スリーブ開口部に延び、前記ハウジングが回転するときに前記ターゲティングスリーブと係合するように構成され、それにより前記ハウジングを前記ターゲティングスリーブにしっかりと取り付けるブレードであって、前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるよう構成される前記ブレードと、
を含む、前記装置。
(17) 前記スリーブ開口部は、第1軸及び第2軸を有する重ね合わされた双楕円形断面を画定し、前記ブレードは、前記楕円形断面の前記第1軸に対して平行に配向される、実施態様16に記載の装置。
(18) 前記ハウジングは、近位面と、前記近位面の反対側の遠位面とを含み、前記ブレードは、前記近位面に平行に前記スリーブ開口部内に横方向に延びる、実施態様16に記載の装置。
(19) 前記ハウジングが、近位面と、前記近位面の反対側の遠位面とを含み、前記ブレードの少なくとも一部は前記近位面と位置合わせされる、実施態様16に記載の装置。
(20) 生検器具とともに使用する装置であって、
(a)前記生検器具のカニューレを受容するサイズ及び形状のチャネルを画定するハウジングであって、回転するとロック解除状態からロック状態に移行するべく前記ハウジングが動作可能であるように選択的に回転可能に構成される前記ハウジングと、
(b)前記ハウジングから前記チャネル内に内向きに延びる少なくとも2つのランプであって、前記ハウジングが選択的に回転するときに前記カニューレに当接するように構成され、それにより触覚型フィードバックを生成する、前記少なくとも2つのランプと、
(c)前記ハウジングから前記チャネルに内向きに延びる少なくとも2つのブレードであって、前記カニューレに対する前記ハウジングの前記選択的な回転時に前記カニューレと係合し、前記カニューレに対して選択された深さで前記ハウジングをロックするように構成されている前記2つのブレードと、
を含む前記装置。
Claims (19)
- 生検器具で使用するための双方向深度停止部であって、
(a)前記生検器具に関連付けられたカニューレを受容するサイズのチャネルを画定する本体であって、前記チャネルが、対向する凹面の第1の対と対向する凹面の第2の対を含み、前記対向する凹面の第1の対と第2の対が、重ね合わされた双楕円形の断面を共に形成する、本体と、
(b)前記本体の反対側に配置されるように、各ブレードが対向する凹面の前記第1の対の凹面に内向きに突出する一対のブレードと、
を備え、
前記本体が、前記カニューレに対して第1の角度方向及び前記第1の角度方向とは反対の第2の角度方向の両方に選択的に回転可能に構成され、前記本体は、いずれかの方向に回転すると、前記一対のブレードが前記カニューレから係合解除されるロック解除状態から、前記一対のブレードが前記カニューレに係合するロック状態に移行するよう動作可能である、深度停止部。 - 対向する凹面の前記第1の対及び第2の対が相互接続されて、各凹面の交差部にリブを形成する、請求項1に記載の深度停止部。
- 前記ロック解除状態の前記本体は、平行移動軸に沿って前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直である、請求項1に記載の深度停止部。
- 前記ロック解除状態の前記本体は、平行移動軸に沿って前記チャネルを通る前記カニューレの平行移動を可能にするように構成され、前記平行移動軸は、前記カニューレの縦軸に垂直であり、前記ロック状態の前記本体は、前記平行移動軸に沿った前記チャネルを通る前記カニューレの平行移動を防ぐように構成されている、請求項1に記載の深度停止部。
- 前記本体が、前部開口部及び後部開口部を画定し、前記前部開口部は、前記カニューレを受容するように構成される、請求項1に記載の深度停止部。
- 前記本体は、前部開口部及び後部開口部を画定し、前記前部開口部は、前記カニューレを受容するように構成され、前記一対のブレードは、前記後部開口部に隣接する前記チャネル内に延びる、請求項1に記載の深度停止部。
- 前記本体は、前部開口部及び後部開口部を画定し、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と前記後部開口部との間の前記チャネルに沿って延びる、請求項1に記載の深度停止部。
- 前記本体が、前部開口部及び後部開口部を画定し、前記前部開口部は、前記カニューレを受容するように構成され、少なくとも2つのランプが、前記チャネルの周りに軸方向に配置され、前記少なくとも2つのランプが前記前部開口部と前記後部開口部との間の前記チャネルに沿って延び、前記本体は、前記本体を前記ロック解除状態から前記ロック状態に移行させるように選択的に操作されるように構成された一対のグリップ側部を含む、請求項1に記載の深度停止部。
- 前記チャネルは、前記カニューレの外形に対応する形状を画定する、請求項1に記載の深度停止部。
- 前記チャネルが前記カニューレの楕円形の断面に対応する楕円形である、請求項1に記載の深度停止部。
- 前記本体と単一構造で一体の少なくとも2つのランプをさらに備える、請求項1に記載の深度停止部。
- 前記一対のブレードの間に配置された少なくとも2つのランプをさらに備え、前記少なくとも2つのランプ及び前記少なくとも一対のブレードは前記本体と単一構造であり、一体である、請求項1に記載の深度停止部。
- 前記一対のブレードがエラストマー材料で形成され、前記本体が選択的に回転してロック状態になると、前記一対のブレードが変形するように構成される、請求項1に記載の深度停止部。
- 前記一対のブレードは、前記本体が選択的に回転してロック状態になったときに前記カニューレを変形させるように構成されるよう、前記一対のブレードが剛性の材料で形成される、請求項1に記載の深度停止部。
- 患者支持面に支えられた患者の乳房の中にターゲティングスリーブを誘導するための装置であって、
(a)前記ターゲティングスリーブを摺動可能に受容するサイズ及び構成のスリーブ開口部を画定する、ハウジングと、
(b)前記スリーブ開口部に延び、前記ハウジングが回転すると前記ターゲティングスリーブと係合するように構成されたランプであって、前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるよう構成され、前記ターゲティングスリーブを係合する際、操作者へ触覚型フィードバックを生成するように構成される、ランプと、
(c)前記スリーブ開口部に延び、前記スリーブ開口部の両側に配向された、第1のブレード及び第2のブレードであって、前記ハウジングが時計回りの方向及び反時計回りの方向の両方に回転するときに前記ターゲティングスリーブと係合するように構成され、それにより前記ハウジングを前記ターゲティングスリーブにしっかりと取り付け、前記ターゲティングスリーブと係合するときに前記ターゲティングスリーブを内側に変形させるよう構成される、第1のブレード及び第2のブレードと、
を含む、装置。 - 前記スリーブ開口部は、第1軸及び第2軸を有する重ね合わされた双楕円形断面を画定し、前記第1のブレード及び前記第2のブレードは、前記双楕円形断面の前記第1軸に対して平行に配向される、請求項15に記載の装置。
- 前記ハウジングは、近位面と、前記近位面の反対側の遠位面とを含み、前記第1のブレード及び前記第2のブレードは、前記近位面に平行に前記スリーブ開口部内に横方向に延びる、請求項15に記載の装置。
- 前記ハウジングが、近位面と、前記近位面の反対側の遠位面とを含み、前記第1のブレード及び前記第2のブレードの少なくとも一部は前記近位面と位置合わせされる、請求項15に記載の装置。
- 生検器具とともに使用する装置であって、
(a)前記生検器具のカニューレを受容するサイズ及び形状のチャネルを画定するハウジングと、
(b)前記ハウジングから前記チャネル内に内向きに延びる少なくとも2つのランプであって、前記ハウジングが選択的に回転するときに前記カニューレに当接するように構成され、それにより触覚型フィードバックを生成する、少なくとも2つのランプと、
(c)前記ハウジングから前記チャネルに内向きに延びる少なくとも2つのブレードであって、ロック解除状態からロック状態への前記カニューレに対する前記ハウジングの前記選択的な回転時に前記カニューレと係合するように構成され、それにより前記カニューレに対して選択された深さで前記ハウジングを前記カニューレ上にロックし、時計回りの方向及び反時計回りの方向の両方への前記ハウジングの回転時に前記カニューレと係合するように構成されている、2つのブレードと、
を含む、装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762560771P | 2017-09-20 | 2017-09-20 | |
| US62/560,771 | 2017-09-20 | ||
| PCT/US2018/052004 WO2019060579A1 (en) | 2017-09-20 | 2018-09-20 | MRI GUIDED BIOPSY DEVICE WITH ROTATING DEPTH STOP DEVICE |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020534101A JP2020534101A (ja) | 2020-11-26 |
| JP2020534101A5 JP2020534101A5 (ja) | 2021-10-21 |
| JP6984007B2 true JP6984007B2 (ja) | 2021-12-17 |
Family
ID=63963397
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020516723A Active JP6984007B2 (ja) | 2017-09-20 | 2018-09-20 | 回転式深度停止デバイスを備えたmriガイドの生検デバイス |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11090033B2 (ja) |
| EP (1) | EP3684267B1 (ja) |
| JP (1) | JP6984007B2 (ja) |
| KR (1) | KR20200057015A (ja) |
| CN (1) | CN111246806A (ja) |
| WO (1) | WO2019060579A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11737851B2 (en) | 2018-06-28 | 2023-08-29 | Cook Medical Technologies Llc | Medical devices for magnetic resonance imaging and related methods |
| US11986215B2 (en) | 2020-05-01 | 2024-05-21 | Cilag Gmbh International | Universal size multi-walled elastomer cannula depth limiter |
| US11633211B2 (en) | 2020-05-01 | 2023-04-25 | Cilag Gmbh International | Pinch to release cannula depth limiter |
| US11980392B2 (en) | 2020-05-01 | 2024-05-14 | Cilag Gmbh International | Pinch-to-clamp cannula depth limiter |
| US11712267B2 (en) | 2020-05-01 | 2023-08-01 | Cilag Gmbh International | Tilting tang cannula depth limiter |
| US12213699B2 (en) | 2020-05-01 | 2025-02-04 | Cilag Gmbh International | Threaded cannula depth limiter |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5217438A (en) * | 1992-07-20 | 1993-06-08 | Dlp, Inc. | Needle stop and safety sheath |
| US5526822A (en) | 1994-03-24 | 1996-06-18 | Biopsys Medical, Inc. | Method and apparatus for automated biopsy and collection of soft tissue |
| US5954670A (en) * | 1994-10-05 | 1999-09-21 | Baker; Gary H. | Mandrel-guided tandem multiple channel biopsy guide device and method of use |
| US6086544A (en) | 1999-03-31 | 2000-07-11 | Ethicon Endo-Surgery, Inc. | Control apparatus for an automated surgical biopsy device |
| US6428487B1 (en) | 1999-12-17 | 2002-08-06 | Ethicon Endo-Surgery, Inc. | Surgical biopsy system with remote control for selecting an operational mode |
| US6602203B2 (en) | 2000-10-13 | 2003-08-05 | Ethicon Endo-Surgery, Inc. | Remote thumbwheel for a surgical biopsy device |
| US6626849B2 (en) | 2001-11-01 | 2003-09-30 | Ethicon Endo-Surgery, Inc. | MRI compatible surgical biopsy device |
| US7854707B2 (en) | 2005-08-05 | 2010-12-21 | Devicor Medical Products, Inc. | Tissue sample revolver drum biopsy device |
| US8568333B2 (en) | 2006-05-01 | 2013-10-29 | Devicor Medical Products, Inc. | Grid and rotatable cube guide localization fixture for biopsy device |
| US7507210B2 (en) * | 2006-05-01 | 2009-03-24 | Ethicon Endo-Surgery, Inc. | Biopsy cannula adjustable depth stop |
| US20080200835A1 (en) * | 2006-06-30 | 2008-08-21 | Monson Gavin M | Energy Biopsy Device for Tissue Penetration and Hemostasis |
| US8702623B2 (en) | 2008-12-18 | 2014-04-22 | Devicor Medical Products, Inc. | Biopsy device with discrete tissue chambers |
| US7938786B2 (en) | 2006-12-13 | 2011-05-10 | Devicor Medical Products, Inc. | Vacuum timing algorithm for biopsy device |
| US20140039343A1 (en) | 2006-12-13 | 2014-02-06 | Devicor Medical Products, Inc. | Biopsy system |
| US9345457B2 (en) | 2006-12-13 | 2016-05-24 | Devicor Medical Products, Inc. | Presentation of biopsy sample by biopsy device |
| US20130324882A1 (en) | 2012-05-30 | 2013-12-05 | Devicor Medical Products, Inc. | Control for biopsy device |
| US7854706B2 (en) | 2007-12-27 | 2010-12-21 | Devicor Medical Products, Inc. | Clutch and valving system for tetherless biopsy device |
| US8328732B2 (en) | 2008-12-18 | 2012-12-11 | Devicor Medical Products, Inc. | Control module interface for MRI biopsy device |
| US20100160819A1 (en) | 2008-12-18 | 2010-06-24 | Parihar Shailendra K | Biopsy Device with Central Thumbwheel |
| US8206316B2 (en) | 2009-06-12 | 2012-06-26 | Devicor Medical Products, Inc. | Tetherless biopsy device with reusable portion |
| US20100324445A1 (en) * | 2009-06-17 | 2010-12-23 | Mollere Rebecca J | MRI Biopsy Cylindraceous Targeting Guide |
| US8277394B2 (en) | 2009-08-18 | 2012-10-02 | Devicor Medical Products, Inc. | Multi-button biopsy device |
| CN103096814B (zh) | 2010-09-10 | 2016-12-28 | 德威科医疗产品公司 | 带有可移除托盘的活检装置组织样本保持器 |
| US8764680B2 (en) | 2010-11-01 | 2014-07-01 | Devicor Medical Products, Inc. | Handheld biopsy device with needle firing |
| US8858465B2 (en) | 2011-04-14 | 2014-10-14 | Devicor Medical Products, Inc. | Biopsy device with motorized needle firing |
| US9486186B2 (en) | 2011-12-05 | 2016-11-08 | Devicor Medical Products, Inc. | Biopsy device with slide-in probe |
| KR101863804B1 (ko) | 2013-07-19 | 2018-06-04 | 데비코어 메디컬 프로덕츠, 인코포레이티드 | 생검 디바이스 타겟팅 피처들 |
| CN114748108A (zh) | 2013-08-28 | 2022-07-15 | 德威科医疗产品公司 | 用于活检装置的组织收集总成 |
| CN106999173A (zh) * | 2014-09-24 | 2017-08-01 | 迪维科医疗产业收购公司 | Mri活检系统 |
| JP2018522627A (ja) * | 2015-06-11 | 2018-08-16 | デビコー・メディカル・プロダクツ・インコーポレイテッドDevicor Medical Products, Inc. | Mri生検システム |
| US20170311932A1 (en) | 2016-04-29 | 2017-11-02 | Devicor Medical Products, Inc. | Depth stop device for use with biopsy targeting assembly |
-
2018
- 2018-09-20 EP EP18792599.5A patent/EP3684267B1/en active Active
- 2018-09-20 US US16/137,072 patent/US11090033B2/en active Active
- 2018-09-20 CN CN201880068349.5A patent/CN111246806A/zh active Pending
- 2018-09-20 WO PCT/US2018/052004 patent/WO2019060579A1/en unknown
- 2018-09-20 JP JP2020516723A patent/JP6984007B2/ja active Active
- 2018-09-20 KR KR1020207009706A patent/KR20200057015A/ko unknown
Also Published As
| Publication number | Publication date |
|---|---|
| US11090033B2 (en) | 2021-08-17 |
| CN111246806A (zh) | 2020-06-05 |
| WO2019060579A1 (en) | 2019-03-28 |
| KR20200057015A (ko) | 2020-05-25 |
| EP3684267B1 (en) | 2023-03-22 |
| JP2020534101A (ja) | 2020-11-26 |
| EP3684267A1 (en) | 2020-07-29 |
| US20190083071A1 (en) | 2019-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6984007B2 (ja) | 回転式深度停止デバイスを備えたmriガイドの生検デバイス | |
| EP1598006B1 (en) | MRI biopsy device localization fixture | |
| US7507210B2 (en) | Biopsy cannula adjustable depth stop | |
| JP6884906B2 (ja) | Mri生検システム | |
| US8162848B2 (en) | MRI biopsy targeting cube with eccentric lock | |
| US8162849B2 (en) | MRI biopsy targeting cube with gripping arms | |
| EP3713499B1 (en) | Adjustable targeting set for mri guided biopsy procedure | |
| JP5956023B2 (ja) | 生検標的立方体 | |
| JP5680345B2 (ja) | 傾斜した境界面を有する生検標的立方体 | |
| US8162847B2 (en) | MRI biopsy targeting cube with snap corners | |
| JP2011000438A (ja) | 一体ヒンジを有する生検標的立方体 | |
| US20110092850A1 (en) | MRI Biopsy Targeting Guide with Rotational Lock | |
| JP5701890B2 (ja) | 保持ワイパーを備えたmri生検標的化キューブ | |
| US20190015084A1 (en) | Targeting cubes for mri biopsy device | |
| US20110092983A1 (en) | MRI Biopsy Targeting Cube with Locking Flap | |
| US20180333144A1 (en) | Method for securely attaching and detaching obturator to introducer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210908 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210908 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210908 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6984007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |