JP6862014B2 - 電力伝送システム及び電力伝送システムの製造方法 - Google Patents
電力伝送システム及び電力伝送システムの製造方法 Download PDFInfo
- Publication number
- JP6862014B2 JP6862014B2 JP2019539580A JP2019539580A JP6862014B2 JP 6862014 B2 JP6862014 B2 JP 6862014B2 JP 2019539580 A JP2019539580 A JP 2019539580A JP 2019539580 A JP2019539580 A JP 2019539580A JP 6862014 B2 JP6862014 B2 JP 6862014B2
- Authority
- JP
- Japan
- Prior art keywords
- electrode
- stator
- rotor
- magnet
- power transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 title claims description 57
- 238000004519 manufacturing process Methods 0.000 title claims description 20
- 125000006850 spacer group Chemical group 0.000 claims description 72
- 239000012530 fluid Substances 0.000 claims description 38
- 230000005291 magnetic effect Effects 0.000 claims description 37
- 230000002093 peripheral effect Effects 0.000 claims description 27
- 239000000696 magnetic material Substances 0.000 claims description 22
- 230000005684 electric field Effects 0.000 claims description 12
- 238000010168 coupling process Methods 0.000 claims description 11
- 238000007789 sealing Methods 0.000 claims description 9
- 230000008878 coupling Effects 0.000 claims description 7
- 238000005859 coupling reaction Methods 0.000 claims description 7
- 238000005516 engineering process Methods 0.000 claims description 6
- 238000000034 method Methods 0.000 description 55
- 239000003921 oil Substances 0.000 description 24
- 238000010586 diagram Methods 0.000 description 20
- 239000003302 ferromagnetic material Substances 0.000 description 19
- 230000005294 ferromagnetic effect Effects 0.000 description 16
- 239000003990 capacitor Substances 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 229910052751 metal Inorganic materials 0.000 description 10
- 239000002184 metal Substances 0.000 description 10
- 229920002545 silicone oil Polymers 0.000 description 9
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 9
- 230000005484 gravity Effects 0.000 description 6
- 230000004907 flux Effects 0.000 description 5
- 239000011553 magnetic fluid Substances 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 239000011737 fluorine Substances 0.000 description 3
- 229910052731 fluorine Inorganic materials 0.000 description 3
- 239000004519 grease Substances 0.000 description 3
- 239000011810 insulating material Substances 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 239000010703 silicon Substances 0.000 description 3
- 229910052710 silicon Inorganic materials 0.000 description 3
- 229910002601 GaN Inorganic materials 0.000 description 2
- JMASRVWKEDWRBT-UHFFFAOYSA-N Gallium nitride Chemical compound [Ga]#N JMASRVWKEDWRBT-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000000498 cooling water Substances 0.000 description 2
- 230000005489 elastic deformation Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 230000005415 magnetization Effects 0.000 description 2
- 229920001778 nylon Polymers 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- HBMJWWWQQXIZIP-UHFFFAOYSA-N silicon carbide Chemical compound [Si+]#[C-] HBMJWWWQQXIZIP-UHFFFAOYSA-N 0.000 description 2
- 229910010271 silicon carbide Inorganic materials 0.000 description 2
- XMWRBQBLMFGWIX-UHFFFAOYSA-N C60 fullerene Chemical compound C12=C3C(C4=C56)=C7C8=C5C5=C9C%10=C6C6=C4C1=C1C4=C6C6=C%10C%10=C9C9=C%11C5=C8C5=C8C7=C3C3=C7C2=C1C1=C2C4=C6C4=C%10C6=C9C9=C%11C5=C5C8=C3C3=C7C1=C1C2=C4C6=C2C9=C5C3=C12 XMWRBQBLMFGWIX-UHFFFAOYSA-N 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- BUGBHKTXTAQXES-UHFFFAOYSA-N Selenium Chemical compound [Se] BUGBHKTXTAQXES-UHFFFAOYSA-N 0.000 description 1
- 230000032683 aging Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 239000004760 aramid Substances 0.000 description 1
- 229920003235 aromatic polyamide Polymers 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000010941 cobalt Substances 0.000 description 1
- 229910017052 cobalt Inorganic materials 0.000 description 1
- GUTLYIVDDKVIGB-UHFFFAOYSA-N cobalt atom Chemical compound [Co] GUTLYIVDDKVIGB-UHFFFAOYSA-N 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000011554 ferrofluid Substances 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 229910003472 fullerene Inorganic materials 0.000 description 1
- 238000005470 impregnation Methods 0.000 description 1
- 239000004761 kevlar Substances 0.000 description 1
- 239000011133 lead Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000007665 sagging Methods 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 239000011669 selenium Substances 0.000 description 1
- 229910052711 selenium Inorganic materials 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 239000012798 spherical particle Substances 0.000 description 1
- 229910052714 tellurium Inorganic materials 0.000 description 1
- PORWMNRCUJJQNO-UHFFFAOYSA-N tellurium atom Chemical compound [Te] PORWMNRCUJJQNO-UHFFFAOYSA-N 0.000 description 1
- 230000008719 thickening Effects 0.000 description 1
- 239000002562 thickening agent Substances 0.000 description 1
- 125000000391 vinyl group Chemical group [H]C([*])=C([H])[H] 0.000 description 1
- 229920002554 vinyl polymer Polymers 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images











































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/05—Circuit arrangements or systems for wireless supply or distribution of electric power using capacitive coupling
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F7/00—Magnets
- H01F7/02—Permanent magnets [PM]
- H01F7/0231—Magnetic circuits with PM for power or force generation
- H01F7/0247—Orientating, locating, transporting arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/40—Circuit arrangements or systems for wireless supply or distribution of electric power using two or more transmitting or receiving devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
- H02K1/2795—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2796—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets where both axial sides of the rotor face a stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
- H02K1/2795—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2798—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets where both axial sides of the stator face a rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K16/00—Machines with more than one rotor or stator
- H02K16/02—Machines with one stator and two or more rotors
- H02K16/025—Machines with one stator and two or more rotors with rotors and moving stators connected in a cascade
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/14—Means for supporting or protecting brushes or brush holders
- H02K5/141—Means for supporting or protecting brushes or brush holders for cooperation with slip-rings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/02—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines of stator or rotor bodies
- H02K15/03—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines of stator or rotor bodies having permanent magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/19—Arrangements for cooling or ventilating for machines with closed casing and closed-circuit cooling using a liquid cooling medium, e.g. oil
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/22—Arrangements for cooling or ventilating by solid heat conducting material embedded in, or arranged in contact with, the stator or rotor, e.g. heat bridges
- H02K9/227—Heat sinks
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Manufacturing & Machinery (AREA)
- Micromachines (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Description
現在使用されているものは、スリップリングであり、接触により送電する手法が用いられている。接触式は、外部回路が不要であるため、容易に製作することができる。しかしながら、接触により送電するため、接点が摩耗したり、高速回転に伴い空気層が形成されて送電不能になったり、水分の混入に伴い水の膜が形成されて送電が遮られる等の問題が生じていた。特に、メンテナンスが必要となる点が問題となっていた。
実用化に至らなかったのは、2つの大きな課題があったためである。その1つは、高周波動作をさせなければならないという課題であり、残りの1つは、電極間がショートしないように回転電極の接合容量を安定的に得るという課題である。ただし、高周波動作をさせなければならないという課題は、GaN(窒化ガリウム)、SiC(炭化ケイ素)等の半導体が開発されたことにより解決された。これにより、残る課題は、電極間がショートしないように回転電極の接合容量を安定的に得るという課題である。
1つ以上のロータ電極と1つ以上のロータスペーサとが交互に積層されたロータ電極ユニットと、1つ以上のステータ電極と1つ以上のステータスペーサとが交互に積層されたステータ電極ユニットと、からなる回転電極ユニットを備え、
前記回転電極ユニットは、
前記ロータ電極が送電電極である場合には、前記ステータ電極が受電電極であり、
前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、
前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、
前記ロータ電極のうち少なくとも外周部は、磁性体からなる部材で構成され、
前記ステータスペーサは、前記ロータ電極の外周部を磁力で吸引する磁石を有する。
前記流体は封止されるようにすることができる。
1つ以上のロータ電極と1つ以上のロータスペーサとが交互に積層されたロータ電極ユニットと、1つ以上のステータ電極と1つ以上のステータスペーサとが交互に積層されたステータ電極ユニットと、からなる回転電極ユニットを備え、前記回転電極ユニットは、前記ロータ電極が送電電極である場合には、前記ステータ電極が受電電極であり、前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、前記ロータ電極のうち少なくとも外周部は、磁性体からなる部材で構成される、電界結合電力伝送技術を適用した電力伝送システムの製造方法であって、
前記ステータスペーサに磁石を配置して、前記ロータ電極の外周部を磁力で吸引する工程と、
前記ロータ電極と前記ステータ電極との間に形成された隙間に流体を封止する工程と、
前記ステータスペーサに配置された前記磁石を取り外す工程と、
を含む。
図2は、従来型の回転型コンデンサとして、ポリバリコンの外観を示す図である。
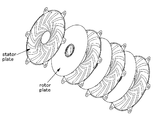
図3A及び図3Bは、回転体へ電力を送る手法として従来から用いられているものを示す図である。
図1及び図2に示すこれら従来型の回転型コンデンサは、ラジオ等の共振回路の共振周波数を可変するために用いられている。このため、手動で回し、キャパシタンスを変化させることを目的としている。おおよその容量は、両者ともに、数百pFの容量を有している。即ち、これら従来型の回転型コンデンサは、いずれも信号の同調等に用いられるものであり、電力の伝送を行うものではない。例えば、図1に示すエアバリコンは、機械的精度でステータ側とロータ側電極の隙間を維持しているため、隙間を狭くして大容量化するには限界がある。また、図2に示すポリバリコンは、フィルムを電極間に挟んで電極間隔を維持している。このため、小型に製作することが可能になる。ただし、高速回転用途には向かない。これは、フィルムと電極間の摩擦劣化により性能が維持できないからである。
また、回転体へ電力を送る手法として、1900年代に発案された、ステータ側円盤電極とロータ側円盤電極とを多層に配置して回転可能な接合容量を形成する手法がある。しかしながら、この手法を実用化させるためには、実用的なキャパシタンスを完全非接触の状態で実現させなければならないという課題が伴う。この課題を解決するための手法としては、図3A及び図3Bに示すウィスコンシン大学により提案されたものがある。ただし、図3A及び図3Bに示す手法では、電極板間に空気を流して間隔を形成させる手法を採用しているため、外部にポンプを設けなければならないとともに、稼働するためのエネルギーを確保しなければならない。このため、実用化のために要するコストが増大してしまう。
図6Bは、ロータスペーサ211とロータ電極212とを結合させた後の状態を示す図である。
即ち、図3A及び図3Bに示すように、ロータ電極212となるリング状の極薄金属板に対して、ロータスペーサ211となる金属リングを同心円状に固定することによりロータ電極ユニット21となる。
図7Bは、ロータ電極ユニット21とステータスペーサ111とを組み合わせた後の状態を示す図である。
即ち、図7A及び図7Bに示すように、ロータ電極ユニット21の周囲にステータスペーサ111を配置する。
図8Bは、ロータ電極ユニット21とステータスペーサ111を組み合わせた物の上下に、ステータ電極112を張り付けて結合させた後の状態を示す図である。即ち、図8Bに示すように、ロータ電極ユニット21とステータスペーサ111との組み合わせの上下に、ステータ電極112を張り付けて結合させることにより、回転電極ユニット100となる。
なお、図6A乃至図8Bに示す例では、説明の都合上、ユニット毎に製作しているが、製造過程では、これら部品を積層し、上下方向に圧接した後にレーザー溶接等で端部を溶接することにより一体化させる。さらに、図8A及び図8Bに示す例では、1枚のロータ電極ユニット21を2枚のステータ電極で上下から挟む構造となっているが、これらを多層に積層したものが回転電極ユニット100である。以上のような手法により軽量かつ薄型の回転電極ユニット100を製造することができる。
以下、本実施形態の電力伝送システムの詳細について説明する。
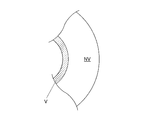
2つの回転電極ユニット100を平行かつ同心円状に配置し、絶縁性材料300を用いて、回転電極ユニット100を、回転体としてのシャフト200に結合させる。個々の回転電極ユニット100からシャフト200上の負荷Rに対して配線する。その一方で、2つのステータ電極ユニット11の間に、高周波電源Vfによる高周波電圧を印可する。これにより、ステータ電極ユニット11側からロータ電極ユニット21側に対し送電することが可能となる。
これに対して、ロータ電極ユニット21側で得られる電力をステータ電極ユニット11側に送電するためには、高周波電源Vfと負荷Rとの位置関係を逆にすればよい。
次に、図10A及び図10Bを参照して、上述した手法により製造された回転電極ユニット100における問題点について説明する。
図10A及び図10Bは、図6A乃至図8Bに示す手法により製造された回転電極ユニット100の問題点を示す断面拡大図である。
具体的には、図10Aに示すように、ステータ電極112とロータ電極212とが対向する部分の長さrを長くしたり、ステータ電極112間の距離dを狭くしたりする手法が考えられる。
例えば、ステータ電極112間の距離dを0.5mm、ステータ電極112の半径を150mm、ロータスペーサ211の半径を50mmとすると、ステータ電極112とロータ電極212とが対向する部分の長さrは、約100mmになる。この場合、ロータ電極212の厚さが0.1mmとすると、ロータ電極212の上下の電極間隔は、それぞれ0.2mmとなる。
なお、ステータ電極112とロータ電極212とが対向している部分の長さrを長くした場合であっても、対向するステータ電極112間の距離dが大きくなってしまうのであれば、結果的に接合容量Ccの増大は望めなくなる。
また、図10Aに示すように、電極同士が(即ち、ロータ電極212とステータ電極112とが)接触する部分Tがあると、ショートしてしまう。なお、ショートを防ぐために、電極に絶縁層をコーティングしたとしても、長い時間電極を回転させ続けていると、いずれはコーティングが剥がれてしまう。このため、電極同士が接触してショートしてしまう。ショートすれば、特定の部位に大電流が流れ、電極が破損してしまう。また、ショートする直前には放電して電極が解けることもあり得る。これにより、コンデンサとしての機能が果たせなくなる。
しかしながら、この手法を用いた場合、次の(1)乃至(4)の問題が生ずる。即ち、(1)流体Fを流すためにポンプが必要になるため、容積及びコストが増大してしまう。(2)流体を循環させるための帰還路を周辺に作る必要があるため、システムの容積が大きくなってしまう。(3)電極板の積層数が増大するに従い、流体を流す為の抵抗が増大するため、外部にポンプを用意する必要がある。しかし、ポンプ圧を高めると、その圧力でステータ電極112に膨らみSが生じてしまう。膨らみSを防ぐためには最外殻のステータ電極112を厚くして強度を上げる必要がある。つまり、装置が大型化してしまう。
(4)流体に粘性がある場合には、ロータの回転トルクが増大してしまう。
次に、図11A及び図11Bを参照して、上述の問題を解決するための手法について説明する。
図11A及び図11Bは、ステータ電極112及びロータ電極212のそれぞれの端部の先に、磁石Mを配置した状態を示す断面拡大図である。
図11Bは、ステータスペーサ111に配置した磁石Mの磁力を利用してロータ電極212の端部のみを吸引する片方向吸引方式を示す図である。
図11A及び図11Bに示すように、電極の端部を磁石Mで引っ張ることで、重力Gの影響による電極の垂れ下がりDの問題を解決することができる。なお、電極全体を強磁性体で構成させてもよいし、電極の外周部のみを強磁性体で構成させて、他の部分は非磁性体で構成させてもよい。また、磁石Mは、永久磁石でもよいし、電気磁石でもよい。永久磁石と電気磁石とを組み合わせてもよい。なお、強磁性体として何を採用するかは特に限定されず、鉄、コバルト、ニッケル等を採用することができる。
なお、図12A及び図12Bに示す例の場合、ロータ電極212及びステータ電極112が強磁性体であることが必要となるが、電極に極めて薄い金属を用いる場合には、磁気抵抗が大きくなるため、磁路を考えることができない。このため、磁石Mの極性はステータ側とロータ側とで一致させる必要はない。さらに、ステータ内、ロータ内でも極性を考慮する必要はない。
図13A及び図13Bは、図11A及び図11B並びに図12A及び図12Bに示す例において採用されている磁石Mとは異なる構成で磁石Mを配置する手法を示す断面図である。
図13Bは、図13Aに示す全体断面図の右半分を拡大した図である。
図12A及び図12Bに示すように、強磁性体からなるステータ電極112及びロータ電極212のそれぞれの周囲に配置する磁石M自体を特異な形(ロータ電極212に対向する面の中央部に窪みを有する形)に加工し、さらに着磁させることも可能である。しかしながら、この場合、コストがかかるとともに、隣接する磁石Mとの間で反発力が生じ、磁石Mを配置することが困難になる。このため、図13A及び図13Bに示すように、鉄等を用いて特異な形(ロータ電極212に対向する面の中央部に窪みを有する形)に製作した強磁性体切片VPを、ロータ電極212の周辺に配置する。この場合、強磁性体切片VPは、当初は磁化されていないため、配置作業が容易になる。また、電極を引っ張る磁石Mの面とは反対側の面に強磁性体Vが配置されているため、磁気回路を構成する点で有効となる。
図14は、外周部222のみが強磁性体で構成され、他の部分は非磁性体で構成されたロータ電極212の周囲に、磁石Mを配置した場合を示す平面拡大図である。
ここで、磁石Mの前(ロータ電極212側)に強磁性体切片VPを配置した場合、磁石Mの吸引力が低下することがあるが、強磁性体切片VPは磁石Mよりも加工がし易い。例えば、磁石Mを薄く加工するには限界があるが、強磁性体切片VPであれば容易に薄く加工することができる。このように、磁石Mの前(ロータ電極212側)に強磁性体切片VPを配置する場合と、配置しない場合とでは、吸引力の確保、加工のし易さといった面でそれぞれメリット、デメリットがある。このため、用途に応じていずれかを選択することができる。
図17Bは、すべて強磁性体Vで構成させた場合を示す図である。この場合、磁石Mで吸引されるが、送電電力が大きいとスキンデプスの影響を受ける。このため、送電電力が大きくない場合に採用することができる構成例である。
図17Cは、内側の端部のみが強磁性体Vで構成され、他の部分は非磁性体NVで構成させた場合を示す図である。ロータスペーサ211側に配置された磁石Mを用いて、ステータ電極112を吸引する場合に採用される構成例である。
図17Dは、図13A及び図13Bの例と同様に、ロータ電極212の外周部222のみを強磁性体Vで構成させ、他の部分を非磁性体NVで構成させた場合を示す図である。ステータスペーサ111側に配置された磁石Mを用いて、ロータ電極212を吸引する場合に採用される構成例である。
図18Aは、磁化方向の異なる2つの磁石を対にして使用する吸引磁石ユニットMUと、その配列手法を示す図である。この配列手法は、図18Aに示すように、電極を吸引する側とは反対側に強磁性体Vを取り付け、さらに全体を非磁性体のカバーCで覆う。これにより、回転電極ユニット100を容易に製作することができる。
図18Bは、固定穴Hが設けられた吸引磁石ユニットMUを用いた配列手法を示す図である。この配列手法は、図18Bに示すように、1つの磁石Mの磁気の方向が、非吸引電極の端面と平行になるように配列させる。このようにしても、磁気回路を形成させることができる。また、吸引磁石ユニットMUとしては、1つの部品で済むため、回転電極ユニット100をより容易に製作することができる。
なお、吸引磁石ユニットMUの配列は、隣接する吸引磁石ユニットMU間に十分な間隔を設けることができれば極性を考慮する必要はない。これに対して、吸引磁石ユニットU同士を近接させる場合には、図18Cに示すように、隣接する吸引磁石ユニットMUは、同極同士が隣り合うように配列させることで大きな吸引力を得ることができる。
図18A乃至図18Cに示すように吸引磁石ユニットMUを配列することもできるが、磁極の配列を考慮して配置した磁石Mをベルト状にした磁石ベルトMBを配列させることもできる。具体的には、図19Aに示すように、磁極の配列を考慮して配置した磁石Mを、やや硬質でありながらも湾曲可能な非磁性かつ絶縁性の材料Eでモールドすることで磁石ベルトMBを製作する。これにより、製作する回転電極ユニット100の半径に変更が生じたとしても、変更に応じて磁石ベルトMBを曲げて対応することができるので、個別の部品を製作する必要がなくなる。また、図18A乃至図18Cの吸引磁石ユニットMUの配列のように極性を確認しながら配列してゆくような手間を省くことができる。これにより、回転電極ユニット100をさらに容易に製作することができる。
なお、磁石ベルトMBを製作するためにモールドする材料Eは特に限定されない。例えば、ナイロン系またはビニル系の材料Eを用いて磁石ベルトMBを製作することができる。また、具体的なモールドの手法も特に限定されない。例えば、磁石Mをアラミド又はケブラー等の強度のある繊維で編んだ網の中に入れて、ナイロン等の樹脂でモールドすることもできる。
ここで、モールドする材料Eが比較的固いために、容易に湾曲させることができない場合があるが、図19A乃至図19Dに示すようにスリットJを設けることで容易に湾曲させることができる。ただし、スリットJを設けるか否かは任意であり必須ではない。
例えば、図21Aに示すように、金属表面を親水性または親油性にする。これにより、表面張力を大きくすることができるので、シールすることなくオイルを封止することができる。
これらの解決手法の他に、次の3つの手法によって流体Fの漏洩を防ぐことができる。即ち、1つ目として、流体Fがオイルである場合には、フェルトのような絶縁性を有するメッシュ材にグリースを混ぜて、多層電極の上下端部にリング状に固定する。これによりオイル漏れを防ぐことができる。2つ目として、メッシュ材に、増ちょう剤を混合する方法である。また、メッシュ部分でオイルの粘度を自動的に上昇させてグリース化し、そのグリースをメッシュ材で保持する方法もある。3つ目は、流体Fがシリコンオイルである場合には、メッシュ素材に鉛、セレンまたはテルル等を混ぜて、メッシュ部分に浸透した状態にあるシリコンオイルをゲル化させる。ゲル化されたシリコンオイルは、メッシュ部に定位させられる。これにより、シリコンオイルの漏洩を防ぐことができる。
なお、磁性流体MFとして何を採用するかについては特に限定されない。例えば水に混ざらない油をベースとしたものに混ぜることもできる。この場合、水を封止することもできる。さらに、フッ素油をベースとした磁性流体MFは、フッ素油がシリコンオイルと混合しない性質を利用してシリコンオイルの封止にも使用することができる。ここで、フッ素油は、蒸気圧が極めて低いため、長期間使用しても磁性流体部が細ることがない。真空用途でも使用することができる。
例えば、磁界式では、大電力送電時には、コイルをフェライトコアが囲んだものを対向させる構造を有するが、重く高価になるとともに、自身が発熱してしまう。
これに対して、電界結合方式は、装置自体に発熱源が無く軽量である利点はあるものの、大電力送電可能な、1nF程度の接合容量を有する回転円盤が実現できないでいた。産業で用いるためには、高信頼性が不可欠である。
本発明では、これを初めて可能とする磁石吸引電極を提案した。これにより、実用性が極めて高くなり、工業用途へ適用されてゆくと期待される。
さらに、液体含侵型、ヒートシンク型へと発展させている。これも、活用場面の拡大が期待できる。
なお、図示はしないが、受電電極602の先端部に磁石Mを配列し、コの字型の固定ブロックBの中央部に強磁性体Vを配置して対向させることで、磁石Mと強磁性体Vとを逆に取り付けることもできる。
これにより、製造過程でのみ磁石Mを使用し、製品になった段階で磁石Mを存在させなくすることができるので、製品の軽量化、及びコスト削減を図ることができる。
即ち、本発明が適用される電力伝送システムは、
1つ以上のロータ電極(例えばロータ電極212)と1つ以上のロータスペーサ(例えばロータスペーサ211)とが交互に積層されたロータ電極ユニット(例えばロータ電極ユニット21)と、1つ以上のステータ電極(例えばステータ電極112)と1つ以上のステータスペーサ(例えばステータスペーサ111)とが交互に積層されたステータ電極ユニット(例えばステータ電極ユニット11)と、からなる回転電極ユニット(例えば回転電極ユニット100)を備え、
前記回転電極ユニットは、
前記ロータ電極が送電電極(例えばステータ電極112)である場合には、前記ステータ電極が受電電極(例えばロータ電極212)であり、
前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、
前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、
前記ロータ電極のうち少なくとも外周部(例えば外周部222)は、磁性体からなる部材で構成され、
前記ステータスペーサは、前記ロータ電極の外周部を磁力で吸引する磁石を有する。
これにより、ロータ電極の端部を磁石で引っ張ることで、重力の影響によるロータ電極の垂れ下がりの問題を解決することができるので、電極間がショートしないように回転電極の接合容量を安定的に得ることができる。その結果、接合容量を増大させることができる。
これにより、ロータ電極の端部を磁石で引っ張るとともに、ステータ電極の端部を磁石で引っ張ることで、重力の影響による電極の垂れ下がりの問題を解決することができる。このため、電極間がショートしないように回転電極の接合容量を安定的に得ることができる。その結果、接合容量をより増大させることができる。
前記流体は封止されるようにすることができる。
これにより、電極間に流体を封止することができるので、電極間がショートしないように回転電極の接合容量を安定的に得ることができる。その結果、接合容量をさらに増大させることができる。
1つ以上のロータ電極と1つ以上のロータスペーサとが交互に積層されたロータ電極ユニットと、1つ以上のステータ電極と1つ以上のステータスペーサとが交互に積層されたステータ電極ユニットと、からなる回転電極ユニットを備え、前記回転電極ユニットは、前記ロータ電極が送電電極である場合には、前記ステータ電極が受電電極であり、前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、前記ロータ電極のうち少なくとも外周部は、磁性体からなる部材で構成される、電界結合電力伝送技術を適用した電力伝送システムの製造方法であって、
前記ステータスペーサに磁石を配置して、前記ロータ電極の外周部を磁力で吸引する工程と、
前記ロータ電極と前記ステータ電極との間に形成された隙間に流体を封止する工程と、
前記ステータスペーサに配置された前記磁石を取り外す工程と、
を含む。
これにより、製造過程でのみ磁石を使用し、製品になった段階で磁石を存在させなくすることができるので、製品の軽量化、及びコスト削減を図ることができる。
Claims (4)
- 電界結合電力伝送技術を適用した電力伝送システムであって、
1つ以上のロータ電極と1つ以上のロータスペーサとが交互に積層されたロータ電極ユニットと、1つ以上のステータ電極と1つ以上のステータスペーサとが交互に積層されたステータ電極ユニットと、からなる回転電極ユニットを備え、
前記回転電極ユニットは、
前記ロータ電極が送電電極である場合には、前記ステータ電極が受電電極であり、
前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、
前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、
前記ロータ電極のうち少なくとも外周部は、磁性体からなる部材で構成され、
前記ステータスペーサは、前記ロータ電極の外周部を磁力で吸引する磁石を有する、
電力伝送システム。 - 前記ロータスペーサは、前記ステータ電極の外周部を磁力で吸引する磁石を有する、
請求項1に記載の電力伝送システム。 - 前記ロータ電極と前記ステータ電極との間に形成された隙間に流体が存在し、
前記流体は封止されている、
請求項1又は2に記載の電力伝送システム。 - 1つ以上のロータ電極と1つ以上のロータスペーサとが交互に積層されたロータ電極ユニットと、1つ以上のステータ電極と1つ以上のステータスペーサとが交互に積層されたステータ電極ユニットと、からなる回転電極ユニットを備え、前記回転電極ユニットは、前記ロータ電極が送電電極である場合には、前記ステータ電極が受電電極であり、前記ロータ電極が受電電極である場合には、前記ステータ電極が送電電極であり、前記ロータ電極ユニットと前記ステータ電極ユニットとが入れ子状に組み合わせて相互に回転可能であり、前記ロータ電極のうち少なくとも外周部は、磁性体からなる部材で構成される、電界結合電力伝送技術を適用した電力伝送システムの製造方法であって、
前記ステータスペーサに磁石を配置して、前記ロータ電極の外周部を磁力で吸引する工程と、
前記ロータ電極と前記ステータ電極との間に形成された隙間に流体を封止する工程と、
前記ステータスペーサに配置された前記磁石を取り外す工程と、
を含む、
電力伝送システムの製造方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017164589 | 2017-08-29 | ||
| JP2017164589 | 2017-08-29 | ||
| PCT/JP2018/031937 WO2019044900A1 (ja) | 2017-08-29 | 2018-08-29 | 電力伝送システム及び電力伝送システムの製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019044900A1 JPWO2019044900A1 (ja) | 2020-09-24 |
| JP6862014B2 true JP6862014B2 (ja) | 2021-04-21 |
Family
ID=65527199
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019539580A Active JP6862014B2 (ja) | 2017-08-29 | 2018-08-29 | 電力伝送システム及び電力伝送システムの製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11289947B2 (ja) |
| JP (1) | JP6862014B2 (ja) |
| WO (1) | WO2019044900A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115172002A (zh) * | 2022-07-20 | 2022-10-11 | 安徽省瀚海新材料股份有限公司 | 一种钕铁硼永磁铁充磁装置及方法 |
Family Cites Families (72)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US405858A (en) * | 1889-06-25 | Nikola Tesla | Magnetic Motor | |
| US2674729A (en) * | 1950-04-13 | 1954-04-06 | Edward G Martin | Measuring apparatus |
| CH353071A (fr) * | 1956-11-07 | 1961-03-31 | S E A Societe D Electronique E | Machine électrique tournante |
| FR77407E (fr) * | 1960-03-17 | 1962-03-02 | Electronique & Automatisme Sa | Machines électriques tournantes perfectionnées |
| FR79354E (fr) * | 1960-09-08 | 1962-11-23 | Electronique & Automatisme Sa | Machines électriques tournantes perfectionnées |
| US2970238A (en) * | 1959-02-12 | 1961-01-31 | Printed Motors Inc | Printed circuit armature |
| US3153165A (en) * | 1959-10-29 | 1964-10-13 | Printed Motors Inc | Electrical synchro-machines of the axial air-gap type |
| FR1259582A (fr) * | 1960-03-17 | 1961-04-28 | Electronique & Automatisme Sa | Dispositif perfectionné de machine électrique tournante synchrone |
| FR78826E (fr) * | 1960-09-08 | 1962-09-14 | Electronique & Automatisme Sa | Machines électriques tournantes perfectionnées |
| US3450919A (en) * | 1965-09-16 | 1969-06-17 | Electronique & Automatisme Sa | Multiple member windings for electrical rotating machines |
| US4187453A (en) * | 1975-01-06 | 1980-02-05 | Jim Zegeer | Electric motor drive system |
| US4115915A (en) * | 1975-07-31 | 1978-09-26 | General Electric Company | Process for manufacturing motor having windings constructed for automated assembly |
| JPS5678342A (en) * | 1979-11-26 | 1981-06-27 | Kangiyou Denki Kiki Kk | Printed circuit |
| US4645961A (en) * | 1983-04-05 | 1987-02-24 | The Charles Stark Draper Laboratory, Inc. | Dynamoelectric machine having a large magnetic gap and flexible printed circuit phase winding |
| DE3526166C2 (de) * | 1984-07-23 | 1996-05-02 | Asahi Chemical Ind | Bürstenloser Elektromotor und Verfahren zum Herstellen einer Spuleneinheit für diesen |
| CH660542A5 (fr) * | 1984-08-31 | 1987-04-30 | Asgalium Sa | Moteur electrique. |
| JPS6244056A (ja) * | 1985-08-20 | 1987-02-26 | Kiyonori Fujisaki | 直流モ−タ |
| DE3821050A1 (de) * | 1988-06-22 | 1989-12-28 | Thomson Brandt Gmbh | Tachogenerator |
| FR2659178B1 (fr) * | 1990-03-02 | 1992-05-15 | Ebauchesfabrik Eta Ag | Ensemble de bobines d'excitation, procede de fabrication d'un tel ensemble et micromoteur electromagnetique equipe de celui-ci. |
| US5942830A (en) * | 1994-04-06 | 1999-08-24 | Hill; Wolfgang | Three-phase electric machine with interlaced conductor layers |
| US6411002B1 (en) * | 1996-12-11 | 2002-06-25 | Smith Technology Development | Axial field electric machine |
| US20020163281A1 (en) * | 2001-05-04 | 2002-11-07 | Menachem Rafaelof | Thin film motors |
| US20030080631A1 (en) * | 2001-11-01 | 2003-05-01 | Nikon Corporation | Sheet coils and linear motors comprising same, and stage units and microlithography apparatus comprising said linear motors |
| DE602004013722D1 (de) * | 2003-02-07 | 2008-06-26 | Core Motion Inc | Optimierte leiteranordnung für eine axialfeld-drehenergieeinrichtung |
| JP4145181B2 (ja) * | 2003-03-28 | 2008-09-03 | オリンパス株式会社 | 静電アクチュエータおよび変位方法 |
| US7239065B2 (en) * | 2003-07-08 | 2007-07-03 | Tibion Corporation | Electrostatic actuator with fault tolerant electrode structure |
| US7053520B2 (en) * | 2003-07-18 | 2006-05-30 | The Regents Of The University Of California | Rotational actuator or motor based on carbon nanotubes |
| US20060087194A1 (en) * | 2004-03-12 | 2006-04-27 | Mitsuhiro Kataoka | Motor using rectangular waveform conductor |
| US20060055265A1 (en) * | 2004-09-16 | 2006-03-16 | Zalusky James T | Printed circuit board motor |
| US20060214535A1 (en) * | 2005-03-22 | 2006-09-28 | Salmon Peter C | Energy converter utilizing electrostatics |
| TWI338434B (en) * | 2006-01-03 | 2011-03-01 | Delta Electronics Inc | Three phase opposite rotating motor and fan |
| GB0617989D0 (en) * | 2006-09-13 | 2006-10-18 | Denne Phillip R M | Improvements in electrical machines |
| US8558425B2 (en) * | 2006-10-26 | 2013-10-15 | Deere & Company | Motor having stator with generally planar windings |
| JP2008245356A (ja) * | 2007-03-26 | 2008-10-09 | Moriyama Denki Seisakusho:Kk | アキシャルギャップ型エンジン駆動発電機 |
| DE102008042967B4 (de) * | 2008-10-20 | 2017-04-06 | Robert Bosch Gmbh | Kaskadierte mikromechanische Aktuatorstruktur |
| JP4571685B2 (ja) * | 2008-12-12 | 2010-10-27 | 本田技研工業株式会社 | アキシャルギャップ型回転電機のステータコイル |
| CN103997137B (zh) * | 2009-01-16 | 2017-04-12 | 巨石风力股份有限公司 | 用于轴向场装置的扇块式定子 |
| JP5351640B2 (ja) * | 2009-03-23 | 2013-11-27 | 日本電産セイミツ株式会社 | 扁平形振動モータ |
| TWI388109B (zh) * | 2009-08-14 | 2013-03-01 | Metal Ind Res & Dev Ct | A stator structure and a micro motor having the stator structure and a method of manufacturing the same |
| US8193678B2 (en) * | 2009-09-07 | 2012-06-05 | Sunonwealth Electric Machine Industry Co., Ltd. | Coil unit for motor stator |
| US8729887B2 (en) * | 2009-11-09 | 2014-05-20 | Aisan Kogyo Kabushiki Kaisha | Rotation angle sensor |
| CN102341996B (zh) * | 2009-12-22 | 2013-09-04 | 株式会社Cosmomechanics | 盘片型线圈 |
| WO2011086596A1 (ja) * | 2010-01-13 | 2011-07-21 | 株式会社コスモメカニクス | コイル装置 |
| US8154156B2 (en) * | 2010-03-16 | 2012-04-10 | Chieftek Precision Co., Ltd. | Coil assembly for linear motor |
| JP5534338B2 (ja) * | 2010-09-30 | 2014-06-25 | 日立工機株式会社 | ディスクモータ及び電動作業機 |
| JP5534337B2 (ja) * | 2010-09-30 | 2014-06-25 | 日立工機株式会社 | ディスクモータ及び電動作業機 |
| TWI413341B (zh) * | 2010-11-12 | 2013-10-21 | Yen Sun Technology Corp | Motor stator and assembly method thereof |
| TWI399012B (zh) * | 2010-11-12 | 2013-06-11 | Yen Sun Technology Corp | Motor stator |
| JP5450361B2 (ja) * | 2010-11-30 | 2014-03-26 | ニスカ株式会社 | アキシャルギャップ型回転機及びアキシャルギャップ型発電機 |
| US8593016B2 (en) * | 2010-12-03 | 2013-11-26 | Sri International | Levitated micro-manipulator system |
| JP2012152028A (ja) * | 2011-01-19 | 2012-08-09 | Denso Corp | 回転電機 |
| US9202512B2 (en) * | 2011-09-01 | 2015-12-01 | Marvell International Ltd. | Data storage device |
| US9184676B2 (en) * | 2011-10-31 | 2015-11-10 | Wisconsin Alumni Research Foundation | Varying capacitance rotating electrical machine |
| US20140368079A1 (en) * | 2012-02-13 | 2014-12-18 | Agency For Science, Technology And Research | Motor and method for assembling the same |
| US9209656B2 (en) * | 2012-05-22 | 2015-12-08 | Nidec Corporation | Brushless motor and disk drive apparatus |
| JP6075722B2 (ja) | 2012-06-21 | 2017-02-08 | ハンファテクウィン株式会社Hanwha Techwin Co.,Ltd. | 作業機械 |
| US9530557B2 (en) * | 2012-06-21 | 2016-12-27 | Hanwha Techwin Co., Ltd. | Working machine powered in a non-contact manner |
| US9812936B2 (en) * | 2012-08-21 | 2017-11-07 | Dai Jie | Drive motor with master-slave flywheel |
| US20140252914A1 (en) * | 2013-03-06 | 2014-09-11 | Lawrence Livermore National Security, Llc | Electrostatic generator/motor designs capable of operation with the electrodes immersed in a liquid or pressurized gas |
| US9270203B2 (en) * | 2013-03-12 | 2016-02-23 | Lawrence Livermore National Security, Llc | Electrode geometry for electrostatic generators and motors |
| US20140262499A1 (en) * | 2013-03-14 | 2014-09-18 | Boulder Wind Power, Inc. | Methods and apparatus for optimizing electrically inoperative zones on laminated composite assemblies |
| US9768674B2 (en) * | 2013-09-13 | 2017-09-19 | Resonant Systems, Inc. | Printed-circuit board coil and motor |
| JP6322391B2 (ja) | 2013-11-20 | 2018-05-09 | ハンファテクウィン株式会社Hanwha Techwin Co.,Ltd. | 作業機械 |
| US9793775B2 (en) * | 2013-12-31 | 2017-10-17 | Boulder Wind Power, Inc. | Methods and apparatus for reducing machine winding circulating current losses |
| US9866148B2 (en) * | 2014-10-05 | 2018-01-09 | C-Motive Technologies Inc. | Electrostatic machine system and method of operation |
| JP2016167957A (ja) | 2015-03-10 | 2016-09-15 | 株式会社ExH | 電力電送システム |
| US9859763B2 (en) * | 2015-10-02 | 2018-01-02 | E-Circuit Motors, Inc. | Structures and methods for controlling losses in printed circuit boards |
| JP2017073901A (ja) * | 2015-10-07 | 2017-04-13 | 株式会社豊田自動織機 | 回転電機 |
| US20170207592A1 (en) * | 2016-01-14 | 2017-07-20 | Advanced Magnet Lab, Inc. | Contactless electrical current transfer apparatus with diamond and other emitter structures and homopolar machines comprising same |
| WO2019161256A2 (en) * | 2018-02-15 | 2019-08-22 | The Charles Stark Draper Laboratory, Inc. | Electrostatic motor |
| US11404976B2 (en) * | 2019-09-06 | 2022-08-02 | Wisconsin Alumni Research Foundation | Dielectric nano-fluid for electrostatic machines and actuators |
| US11522469B2 (en) * | 2019-12-06 | 2022-12-06 | Alliance For Sustainable Energy, Llc | Electric machines as motors and power generators |
-
2018
- 2018-08-29 US US16/642,350 patent/US11289947B2/en active Active
- 2018-08-29 WO PCT/JP2018/031937 patent/WO2019044900A1/ja active Application Filing
- 2018-08-29 JP JP2019539580A patent/JP6862014B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019044900A1 (ja) | 2019-03-07 |
| US11289947B2 (en) | 2022-03-29 |
| US20200280209A1 (en) | 2020-09-03 |
| JPWO2019044900A1 (ja) | 2020-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ludois et al. | Aerodynamic fluid bearings for translational and rotating capacitors in noncontact capacitive power transfer systems | |
| US8960397B2 (en) | Apparatus for transmitting torque | |
| CN101483378A (zh) | 耐高温高性能斜槽式转子异步磁力联轴器 | |
| JP6172945B2 (ja) | 磁性流体駆動装置並びにそれを用いた熱輸送装置及び動力発生装置 | |
| WO2016078039A1 (zh) | 一种磁性传动装置 | |
| JP6862014B2 (ja) | 電力伝送システム及び電力伝送システムの製造方法 | |
| CN104506015B (zh) | 一种磁性传动装置 | |
| CN105917130A (zh) | 滚动轴承装置 | |
| JP2014529892A (ja) | 送電のための回転接続器 | |
| JP6664767B1 (ja) | 着磁装置、着磁方法及びマグネット駆動のポンプ | |
| CN106160566A (zh) | 一种基于压电叠堆驱动方式的行波型超声电机 | |
| WO2018052033A1 (ja) | 回転電機 | |
| JP2013132116A (ja) | 回転電機 | |
| CN100547888C (zh) | 流体驱动部件和传热系统 | |
| US20160248313A1 (en) | Electric Water Pump | |
| WO2016178425A1 (ja) | 電力伝送回転体 | |
| US10816002B2 (en) | High temperature pump unit with magnetic coupling | |
| US10720817B1 (en) | DC induction motor driven by a unidirectional current induced in to a rotor ring | |
| CN110474456A (zh) | 永磁同步电机转子及具有其的压缩机 | |
| JPS62284995A (ja) | マグネツトポンプ | |
| JP6077089B2 (ja) | トルクを磁気的に伝達するための改良された装置 | |
| US9735656B2 (en) | Electrical machines with liquid cooling | |
| US20120045907A1 (en) | Electrical component structure | |
| CN114982094A (zh) | 磁极片装置以及磁性齿轮 | |
| JP2020046012A (ja) | 磁気歯車機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210324 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6862014 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |