JP6829438B2 - 点着量測定システム、点着量測定方法及びプログラム - Google Patents
点着量測定システム、点着量測定方法及びプログラム Download PDFInfo
- Publication number
- JP6829438B2 JP6829438B2 JP2017043776A JP2017043776A JP6829438B2 JP 6829438 B2 JP6829438 B2 JP 6829438B2 JP 2017043776 A JP2017043776 A JP 2017043776A JP 2017043776 A JP2017043776 A JP 2017043776A JP 6829438 B2 JP6829438 B2 JP 6829438B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- tip
- dotted
- spotting
- liquid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
液体を吸入及び吐出する点着チップ(単にチップともいう)が先端に取り付けられた分注ピペットを用いて被点着材に点着される。
上記点着量測定システムは、少なくとも前記撮像装置の視野を照明する光源をさらに備えても良い。
入力部63は、キーボード、マウス、タッチパネル等の入力デバイスによって構成され、ユーザによりなされた操作に応じた情報を演算部66に入力する。
画像記憶部653は、カメラ4から出力された画像データに基づいて生成された画像を記憶する。
点着量記憶部654は、演算部66により算出された各ウェル21への点着量を記憶する。
位置制御部662は、設定情報記憶部652に記憶された各種設定情報に従い、移動機構34の動作を制御するための制御信号を生成する。
駆動制御部663は、設定情報記憶部652に記憶された各種設定情報に従い、駆動機構35の動作を制御するための制御信号を生成する。
点着量算出部665は、画像処理部664が生成した画像に基づいて点着量の算出処理を実行する。
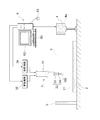
点着開始に先立ち、ステップS10において、情報処理装置6は、チップ32の先端部のみが写った画像である基準画像を取得する。即ち、図5に示すように、チップ32の先端部にカメラ4の視野Vを合わせて撮像を実行させ、カメラ4から出力された画像データに基づいて画像を生成する。このとき、チップ32にマーカー34が設けられている場合には、マーカー34も視野Vに収める。その後、点着を開始する。
続くステップS12において、駆動制御部663は、駆動機構35を動作させることにより、分注ピペット3から液体を吐出させ、チップ32の先端部に垂下させる。
点着量の算出は、基準画像を用いることなく、点着前画像及び点着後画像のみを用いて行っても良い。即ち、図10に示すように、点着前画像M3から点着後画像M4を差し引くことにより、差分画像を生成し、この差分画像に対して二値化処理を施すことにより、領域m13を抽出する。なお、差分画像の生成に先立って、マーカー34の像をもとに点着前画像と点着後画像との位置合わせを行うことが好ましい。そして、この領域m13を鉛直軸回りに回転させた回転体の体積を、ウェル21内に点着された実質的な点着量とする。体積の算出方法は、上述した実施形態と同様である。
2 マイクロプレート
3 分注ピペット
4 カメラ
4a 撮像素子
5 照明装置
6 情報処理装置
21 ウェル
31 ピペット本体
32 チップ
33 チップ本体
34 マーカー
34 移動機構
35 駆動機構
61 画像取得部
62 表示部
63 入力部
64 通信部
65 記憶部
66 演算部
100 液体
651 プログラム記憶部
652 設定情報記憶部
653 画像記憶部
654 点着量記憶部
661 撮像制御部
662 位置制御部
663 駆動制御部
664 画像処理部
665 点着量算出部
Claims (11)
- 被写体を撮像して画像データを出力する撮像装置と、
前記撮像装置から出力される画像データに基づき、分注ピペットにより被点着材に点着する前に撮像され、少なくとも前記分注ピペットに設けられたチップの先端部と該先端部から垂下する液体とが写った画像である点着前画像と、前記分注ピペットにより前記被点着材に点着した後に撮像され、少なくとも前記チップの先端部が写った画像である点着後画像とを生成し、前記点着前画像及び前記点着後画像に基づいて、前記被点着材に点着された液体の容量である点着量を算出する情報処理装置と、
を備える点着量測定システム。 - 前記情報処理装置は、
前記点着前画像及び前記点着後画像を生成すると共に、前記撮像装置から出力される画像データに基づき、液体が垂下していない状態の前記チップの先端部が写った画像である基準画像を生成し、前記点着前画像と前記基準画像との第1の差分画像を生成して該第1の差分画像から前記液体が写った第1の領域を抽出すると共に、前記点着後画像と前記基準画像との第2の差分画像を生成して該第2の差分画像から前記液体が写った第2の領域を抽出する画像処理部と、
抽出された前記第1及び第2の領域に基づいて前記点着量を算出する点着量算出部と、
を有する、請求項1に記載の点着量測定システム。 - 前記画像処理部は、さらに、前記点着前画像と前記基準画像との間、及び、前記点着後画像と前記基準画像との間で、前記チップの像に基づいて位置合わせを行う、請求項2に記載の点着量測定システム。
- 前記情報処理装置は、
前記点着前画像及び前記点着後画像を生成すると共に、前記点着前画像と前記点着後画像との差分画像を生成し、該差分画像から前記液体が写った領域を抽出する画像処理部と、
抽出された前記領域に基づいて前記点着量を算出する点着量算出部と、
を有する、請求項1に記載の点着量測定システム。 - 前記画像処理部は、さらに、前記点着前画像と前記点着後画像との間で、前記チップの像に基づいて位置合わせを行う、請求項4に記載の点着量測定システム。
- 前記チップは、
液体を吐出するチップ本体と、
前記チップ本体の外周面に設けられたマーカーと、
を有し、
前記撮像装置は、少なくとも前記マーカーを視野に収めるように配置され、
前記画像処理部は、前記マーカーの像を基準に前記位置合わせを行う、請求項3又は5に記載の点着量測定システム。 - 前記画像処理部は、さらに、前記マーカーの像を基準に、前記点着前画像及び前記点着後画像の傾き補正を行う、請求項6に記載の点着量測定システム。
- 前記撮像装置は、テレセントリックレンズを備える、請求項1〜7のいずれか1項に記載の点着量測定システム。
- 少なくとも前記撮像装置の視野を照明する光源をさらに備える請求項1〜8のいずれか1項に記載の点着量測定システム。
- 分注ピペットにより被点着材に点着する前に撮像を行うことにより取得された画像データに基づき、少なくとも前記分注ピペットに設けられたチップの先端部と該先端部から垂下する液体とが写った画像である点着前画像を生成するステップと、
前記分注ピペットにより前記被点着材に点着した後に撮像を行うことにより取得された画像データに基づき、少なくとも前記チップの先端部が写った画像である点着後画像を生成するステップと、
前記点着前画像及び前記点着後画像に基づき、前記被点着材に点着された液体の容量である点着量を算出するステップと、
を含む点着量測定方法。 - 被写体を撮像して画像データを出力する撮像装置と、前記撮像装置から出力された画像データに基づいて情報処理を行う情報処理装置とを備える点着量測定システムにおいて、前記情報処理装置に実行させるプログラムであって、
分注ピペットにより被点着材に点着する前に前記撮像装置に撮像を実行させ、前記撮像装置から出力される画像データに基づき、少なくとも前記分注ピペットに設けられたチップの先端部と該先端部から垂下する液体とが写った画像である点着前画像を生成するステップと、
前記分注ピペットにより前記被点着材に点着した後に前記撮像装置に撮像を実行させ、前記撮像装置から出力される画像データに基づき、少なくとも前記チップの先端部が写った画像である点着後画像を生成するステップと、
前記点着前画像及び前記点着後画像に基づき、前記被点着材に点着された液体の容量である点着量を算出するステップと、
を実行させるプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017043776A JP6829438B2 (ja) | 2017-03-08 | 2017-03-08 | 点着量測定システム、点着量測定方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017043776A JP6829438B2 (ja) | 2017-03-08 | 2017-03-08 | 点着量測定システム、点着量測定方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018146479A JP2018146479A (ja) | 2018-09-20 |
| JP6829438B2 true JP6829438B2 (ja) | 2021-02-10 |
Family
ID=63592026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017043776A Active JP6829438B2 (ja) | 2017-03-08 | 2017-03-08 | 点着量測定システム、点着量測定方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6829438B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL9101825A (nl) * | 1991-10-30 | 1993-05-17 | Academisch Ziekenhuis Vrije Un | Werkwijze voor nauwkeurige uitstroomdebiet bepaling van vloeistoffen en op een inrichting voor het uitvoeren van die werkwijze. |
| JP3926546B2 (ja) * | 2000-09-22 | 2007-06-06 | 富士フイルム株式会社 | 点着検出方法および点着検出装置 |
| JP2006276003A (ja) * | 2005-03-03 | 2006-10-12 | Juki Corp | 分注装置 |
| JP2008175791A (ja) * | 2007-01-22 | 2008-07-31 | Juki Corp | 分注装置 |
| JP6290651B2 (ja) * | 2014-02-27 | 2018-03-07 | 株式会社キーエンス | 画像測定器 |
| DE112016000229T5 (de) * | 2015-01-13 | 2017-09-07 | Murata Manufacturing Co., Ltd. | Tropfraten-Messvorrichtung, Tropfraten-Controller, Tropfinfusionsvorrichtung, und Flüssigkeitstropfen-Volumenmessvorrichtung |
| JP6639122B2 (ja) * | 2015-07-03 | 2020-02-05 | 東芝デベロップメントエンジニアリング株式会社 | 吐出量測定装置 |
-
2017
- 2017-03-08 JP JP2017043776A patent/JP6829438B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018146479A (ja) | 2018-09-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102628669B (zh) | 尺寸测量设备、尺寸测量方法及用于尺寸测量设备的程序 | |
| EP1796040A3 (en) | Human being detection apparatus, method of detecting human being, and human being detecting program | |
| EP2189892A3 (en) | Method and apparatus for image processing | |
| JP2010133925A (ja) | 検体処理装置 | |
| TW201840991A (zh) | 電路板點膠檢測裝置及檢測方法 | |
| US20060228017A1 (en) | Impurity measuring method and device | |
| US10318838B2 (en) | Drawing apparatus, operation control method for drawing apparatus, and computer-readable recording medium | |
| JP2007309888A (ja) | 分注装置 | |
| JP2008073158A (ja) | 画像処理装置 | |
| WO2013122013A1 (ja) | 自動分析装置の調整システム、及び自動分析装置の調整方法 | |
| US20220337792A1 (en) | Systems and methods for facilitating placement of labware components | |
| JP2008175791A (ja) | 分注装置 | |
| JP7226706B2 (ja) | 吐出量測定システム及び吐出量測定方法 | |
| JP6829438B2 (ja) | 点着量測定システム、点着量測定方法及びプログラム | |
| JP5635963B2 (ja) | 飲料液異物検査装置および飲料液異物検査方法 | |
| JP6379385B2 (ja) | 検査ユニットおよび検体分析装置 | |
| KR101522312B1 (ko) | Pcb 제품 검사 장치 및 이를 이용한 pcb 제품 검사 방법 | |
| JP2019015541A (ja) | レンズ測定装置 | |
| JP5452214B2 (ja) | 遺伝子検査装置 | |
| JP5423278B2 (ja) | 色空間判別条件生成装置及びこれを使用した画像検査装置 | |
| JP2023036742A (ja) | マニピュレーションシステム及びマニピュレーションシステムの駆動方法 | |
| JP6167511B2 (ja) | 書画カメラ、書画カメラの制御方法 | |
| TWI602092B (zh) | 對使用輸入裝置之顯示器校準該輸入裝置的技術 | |
| JP5491817B2 (ja) | 電子顕微鏡における薄膜試料位置認識装置 | |
| JP2012185728A (ja) | 画像認識システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210106 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6829438 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |