JP6819078B2 - エンコーダー、ロボット、及びエンコーダー一体型モーター - Google Patents
エンコーダー、ロボット、及びエンコーダー一体型モーター Download PDFInfo
- Publication number
- JP6819078B2 JP6819078B2 JP2016107163A JP2016107163A JP6819078B2 JP 6819078 B2 JP6819078 B2 JP 6819078B2 JP 2016107163 A JP2016107163 A JP 2016107163A JP 2016107163 A JP2016107163 A JP 2016107163A JP 6819078 B2 JP6819078 B2 JP 6819078B2
- Authority
- JP
- Japan
- Prior art keywords
- encoder
- shaft
- gear
- housing
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
この構成により、エンコーダーは、シール部を介して歯車と光学検出器との間を隔離する。これにより、エンコーダーは、シール部を介して歯車と光学検出器との間を隔離しつつ小型化することができる。
この構成により、エンコーダーでは、シール部は、オイルシールである。これにより、エンコーダーは、オイルシールを介して歯車と光学検出器との間を隔離しつつ小型化することができる。
この構成により、エンコーダーでは、第1貫通孔と第2貫通孔を用いて、光学基板と光学ディスクとが位置決め可能である。これにより、エンコーダーは、組み立て時において光学基板と光学ディスクとの相対的な位置がずれてしまうことによる誤差を抑制することができる。
この構成により、エンコーダーでは、シール部は、第1シャフトと第1筐体との間に位置する。これにより、エンコーダーは、第1シャフトと第1筐体との間に位置するシール部によって歯車と光学検出器との間を隔離しつつ小型化することができる。
この構成により、エンコーダーでは、第1位置検出器は、第1シャフトに設けられた第1磁石と、第1磁石から出る磁束を検出する第1磁束検出素子と、を有する。これにより、エンコーダーは、第1位置検出器によって第1シャフトの角度位置を検出することができる。
この構成により、エンコーダーでは、第1位置検出器は、第1歯車と噛み合う第2歯車と、第2歯車に設けられた第2磁石と、を有し、第2磁石とシール部は同一平面上に位置する。これにより、エンコーダーは、第2磁石と同一平面上に位置するシール部によって歯車と光学検出器との間を隔離しつつ小型化することができる。
この構成により、エンコーダーでは、第1位置検出器は、第2磁石から出る磁束を検出する第2磁束検出素子を有し、第1筐体は、第2磁石と第2磁束検出素子との間に位置する第1部分を有する。これにより、エンコーダーは、第2磁石と第2磁束検出素子との相対的な距離が変化してしまうことを抑制することができる。
この構成により、エンコーダーでは、第1位置検出器は、第2磁束検出素子が設けられた磁気基板を有し、第1筐体に設けられた挿入部材又は第1筐体に形成された突起部により、第1筐体と磁気基板とが位置決め可能である。これにより、エンコーダーは、第1筐体と磁気基板との相対的な位置がずれてしまうことを抑制することができる。
この構成により、エンコーダーでは、第2シャフトは、モーターの筐体に形成された凹部に挿通されている。これにより、エンコーダーは、第2シャフトを挿通するための他の部材を必要としないため、第2シャフトの軸方向におけるエンコーダーの大きさを小さくすることができる。
この構成により、エンコーダーでは、第1シャフトの軸方向において、第1シャフトの凹部を用いて、第2位置検出器が有する光学ディスクと第1シャフトとの位置決め可能である。これにより、エンコーダーは、第1シャフトと光学ディスクとの相対的な位置がずれてしまうことを抑制することができる。
この構成により、エンコーダーでは、第1筐体は、樹脂を含む。これにより、エンコーダーは、エンコーダー3に熱を伝える物体からの光学検出器への伝熱を抑制し、光学検出器の熱膨張を抑制することができる。
この構成により、モーターは、エンコーダーにおいて、シール部を介して歯車と光学検出器との間を隔離する。これにより、モーターは、エンコーダーを含む全体の大きさを小型化することができる。
この構成により、ロボットは、モーターが備えるエンコーダーにおいて、シール部を介して歯車と光学検出器との間を隔離する。これにより、ロボットは、エンコーダーを備えるモーターを含む全体の大きさを小型化することができる。
また、モーターは、エンコーダーにおいて、シール部を介して歯車と光学検出器との間を隔離する。これにより、モーターは、エンコーダーを含む全体の大きさを小型化することができる。
また、ロボットは、モーターが備えるエンコーダーにおいて、シール部を介して歯車と光学検出器との間を隔離する。これにより、ロボットは、エンコーダーを備えるモーターを含む全体の大きさを小型化することができる。
以下、本発明の実施形態について、図面を参照して説明する。
まず、ロボット1の構成について説明する。
図1は、実施形態に係るロボット1の構成の一例を示す図である。ロボット1は、床面や壁面等の設置面に設置される支持台Bと、支持台Bにより第1軸AX1周りに回動可能に支持された第1アームA1と、第1アームA1により第2軸AX2周りに回動可能に支持された第2アームA2と、第2アームA2により第3軸AX3周りに回動可能且つ第3軸AX3の軸方向に並進可能に支持されたシャフトSを備えるスカラロボットである。
以下、図2〜図6を参照し、エンコーダー3の構成について説明する。
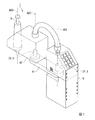
図2は、エンコーダー3の構成の一例を示す分解斜視図である。また、図3は、図2に示したエンコーダー3を他の角度から見た場合の分解斜視図である。また、図4は、図2に示したエンコーダー3の分解側面図である。また、図5は、図4に示したエンコーダー3を他の側面から見た場合の分解側面図である。また、図6は、図4に示したエンコーダー3を組み立てた場合の断面図である。なお、図2〜図6には、エンコーダー3を構成する主要な部品のみを図示してあり、一部の部品については、図示を省略している。
光学基板CB2は、第1磁束検出素子MD1が設けられた基板である。なお、光学基板CB2は、2以上に分割された基板を組み合わせた基板であってもよい。
以下、再び図6を参照し、エンコーダー3の組み立て時における第1シャフトS1への光学ディスクDの組み付けについて説明する。
以下、図8及び図9を参照し、エンコーダー3の組み立て時における磁気基板CB1と、第1筐体41との位置合わせについて説明する。
以下、図10を参照し、エンコーダー3の組み立て時における光学基板CB2と、光学ディスクDとの位置合わせについて説明する。
また、第1位置検出器11は、歯車部Gを有する磁気式エンコーダー装置であったが、これに代えて、歯車部Gを有するレゾルバや光学式エンコーダー装置等の歯車部Gを有する他のエンコーダー装置であってもよい。
Claims (12)
- 内部に第1空間を有し、前記第1空間と前記第1空間とは異なる第2空間との間に位置するシール部を有する、第1筐体と、
前記第1空間に設けられた歯車を有する、第1位置検出器と、
前記第2空間に設けられた光学検出器を有する、第2位置検出器と、
を備え、
前記歯車と前記光学検出器との間は、前記シール部を介して隔離されており、
前記シール部は、オイルシール、ガスケット、パッキン、防水シールのうちのいずれかである、エンコーダー。 - 前記光学検出器は、光学素子が設けられ、第1貫通孔を有する光学基板と、第2貫通孔を有する光学ディスクとを有し、
前記第1貫通孔と前記第2貫通孔を用いて、前記光学基板と前記光学ディスクとが位置決めされる、
請求項1に記載のエンコーダー。 - 前記第1筐体は、樹脂を含む、
請求項1又は2に記載のエンコーダー。 - 内部に第1空間を有し、前記第1空間と前記第1空間とは異なる第2空間との間に位置する隔壁部及びシール部を有する、第1筐体と、
前記第1空間に設けられた歯車を有する、第1位置検出器と、
前記第2空間に設けられた光学検出器を有する、第2位置検出器と、
を有するエンコーダーと、
前記歯車が設けられた第1シャフトを有する 、ロボットアーム駆動用のモーターと、
を、備え、
前記隔壁部には、前記第1シャフトが貫通する貫通孔が設けられており、
前記貫通孔における前記第1シャフトと前記隔壁部との間には、前記シール部が配置されており、
前記第1空間と前記第2空間とは、前記第1シャフトの回転軸方向において、前記シール部を挟んで並んでおり、
前記シール部は、オイルシール、ガスケット、パッキン、防水シールのうちのいずれかである、ロボット。 - 前記第1位置検出器は、前記第1シャフトに設けられた第1磁石と、前記第1磁石から出る磁束を検出する第1磁束検出素子と、を有する、
請求項4に記載のロボット。 - 前記第1位置検出器は、前記第1歯車と噛み合う第2歯車と、前記第2歯車に設けられた第2磁石と、を有し、前記第2磁石と前記シール部は同一平面上に位置する、
請求項4又は5に記載のロボット。 - 前記第1位置検出器は、前記第2磁石から出る磁束を検出する第2磁束検出素子を有し、
前記第1筐体は、前記第2磁石と前記第2磁束検出素子との間に位置する第1部分を有する、
請求項6に記載のロボット。 - 前記第1位置検出器は、前記第2磁束検出素子が設けられた磁気基板を有し、
前記第1筐体に設けられた挿入部材又は前記第1筐体に形成された突起部により、前記第1筐体と前記磁気基板とが位置決めされる、
請求項7に記載のロボット。 - 前記第1位置検出器は、前記第2歯車に挿通された第2シャフトを有し、
前記第2シャフトは、モーターの筐体に形成された凹部に挿通されている、
請求項6から8のうちいずれか一項に記載のロボット。 - 前記第1シャフトの端部に凹部が形成され、前記第1シャフトの軸方向において、前記凹部を用いて、前記第2位置検出器が有する光学ディスクと前記第1シャフトとが位置決めされる、
請求項4から9のうちいずれか一項に記載のロボット。 - 前記第1筐体は、樹脂を含む、
請求項4から10のうちいずれか一項に記載のロボット。 - 内部に第1空間を有し、前記第1空間と前記第1空間とは異なる第2空間との間に位置するシール部を有する、第1筐体と、
前記第1空間に設けられた歯車を有する、第1位置検出器と、
前記第2空間に設けられた光学検出器を有する、第2位置検出器と、
を有するエンコーダーと、
前記歯車が設けられた第1シャフトと、
を備えるロボットアーム駆動用のモーターであって、
前記隔壁部には、前記第1シャフトが貫通する貫通孔が設けられており、
前記貫通孔における前記第1シャフトと前記隔壁部との間には、前記シール部が配置されており、
前記第1空間と前記第2空間とは、前記第1シャフトの回転軸方向において、前記シール部を挟んで並んでおり、
前記シール部は、オイルシール、ガスケット、パッキン、防水シールのうちのいずれかである、エンコーダー一体型モーター。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016107163A JP6819078B2 (ja) | 2016-05-30 | 2016-05-30 | エンコーダー、ロボット、及びエンコーダー一体型モーター |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016107163A JP6819078B2 (ja) | 2016-05-30 | 2016-05-30 | エンコーダー、ロボット、及びエンコーダー一体型モーター |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017215148A JP2017215148A (ja) | 2017-12-07 |
| JP2017215148A5 JP2017215148A5 (ja) | 2019-05-30 |
| JP6819078B2 true JP6819078B2 (ja) | 2021-01-27 |
Family
ID=60576740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016107163A Active JP6819078B2 (ja) | 2016-05-30 | 2016-05-30 | エンコーダー、ロボット、及びエンコーダー一体型モーター |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6819078B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7234577B2 (ja) | 2018-10-31 | 2023-03-08 | セイコーエプソン株式会社 | ロボットシステム、ロボット制御方法、及びエンコーダー |
| JP7234580B2 (ja) | 2018-10-31 | 2023-03-08 | セイコーエプソン株式会社 | ロボットシステム、ロボット制御方法、及びエンコーダー |
| JP7274294B2 (ja) * | 2019-01-25 | 2023-05-16 | ニデックインスツルメンツ株式会社 | エンコーダの製造方法、エンコーダおよびエンコーダ付きモータ |
| JP7272075B2 (ja) * | 2019-04-08 | 2023-05-12 | セイコーエプソン株式会社 | エンコーダー、モーター及びロボット |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS548777Y2 (ja) * | 1973-03-06 | 1979-04-21 | ||
| JPS5826665U (ja) * | 1981-07-16 | 1983-02-21 | 株式会社デンソー | 回転速度センサ |
| JP3671521B2 (ja) * | 1996-06-20 | 2005-07-13 | 多摩川精機株式会社 | 傾斜検出方法 |
| CN202420512U (zh) * | 2011-12-09 | 2012-09-05 | 合肥信朗动力科技有限公司 | 非道路车辆点燃式发动机凸轮轴信号传感器装置 |
| JP2014083613A (ja) * | 2012-10-22 | 2014-05-12 | Seiko Epson Corp | ロボット |
-
2016
- 2016-05-30 JP JP2016107163A patent/JP6819078B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017215148A (ja) | 2017-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6819078B2 (ja) | エンコーダー、ロボット、及びエンコーダー一体型モーター | |
| JP6578642B2 (ja) | モータ | |
| JP5734065B2 (ja) | ジョイスティック装置 | |
| US11002355B2 (en) | Actuator with sensor on output flange | |
| US20180115224A1 (en) | Motor | |
| KR20180132064A (ko) | 회전 액추에이터 및 로봇 | |
| JP6819411B2 (ja) | 電動アクチュエータ | |
| US20180223973A1 (en) | Electric actuator | |
| JP2007321879A (ja) | 回転位置センサ付き減速機ユニット | |
| US10794465B2 (en) | Electric actuator | |
| JP6939185B2 (ja) | 電動アクチュエータ | |
| US11408485B2 (en) | Electric actuator | |
| US20180215036A1 (en) | Robot | |
| WO2014112361A1 (ja) | センサ組込回転コネクタ | |
| WO2020110901A1 (ja) | アブソリュートエンコーダ | |
| JP7102842B2 (ja) | 駆動装置 | |
| CN111795709A (zh) | 编码器、马达及机器人 | |
| US20180219461A1 (en) | Robot | |
| KR20160025381A (ko) | 모터 및 이를 포함하는 동력 전달 장치 | |
| US20220221310A1 (en) | Absolute encoder | |
| JP7441099B2 (ja) | アブソリュートエンコーダ | |
| JP5579282B2 (ja) | センサ組込回転コネクタ | |
| JP2019105529A (ja) | ロータリエンコーダ | |
| JP2014142270A (ja) | 開度検出装置 | |
| JP2021067299A (ja) | 過負荷保護機構およびこれを備えるギヤードモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181026 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190418 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190418 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201201 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201214 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6819078 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |