WO2020110901A1 - アブソリュートエンコーダ - Google Patents
アブソリュートエンコーダ Download PDFInfo
- Publication number
- WO2020110901A1 WO2020110901A1 PCT/JP2019/045610 JP2019045610W WO2020110901A1 WO 2020110901 A1 WO2020110901 A1 WO 2020110901A1 JP 2019045610 W JP2019045610 W JP 2019045610W WO 2020110901 A1 WO2020110901 A1 WO 2020110901A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- gear
- driven gear
- absolute encoder
- shaft
- intermediate gear
- Prior art date
Links
Images



















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
- G01D5/245—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains using a variable number of pulses in a train
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/20—Detecting rotary movement
- G01D2205/28—The target being driven in rotation by additional gears
Abstract
アブソリュートエンコーダは、主軸の回転に従って回転する第1駆動歯車(ウォームギア部1d)と、前記第1駆動歯車にかみ合う第1従動歯車(ウォームホイール部2a)と、前記第1従動歯車と同軸上に設けられ、前記第1従動歯車の回転に従って回転する第2駆動歯車(ウォームギア部2b)と、平面視で前記第1従動歯車及び前記第2駆動歯車に対して前記第1駆動歯車とは反対側に設けられ、前記第2駆動歯車にかみ合う第2従動歯車と、前記第2従動歯車の回転に従って回転する回転体の回転角を検知する角度センサとを備える。
Description
本発明は、アブソリュートエンコーダに関する。
従来より、各種の制御機械装置において、可動要素の位置や角度を検出するために用いられるロータリーエンコーダが知られている。このようなエンコーダには、相対的な位置又は角度を検出するインクリメンタル型のエンコーダと、絶対的な位置又は角度を検出するアブソリュート型のエンコーダとが存在する。例えば特許文献1には、自動制御装置、ロボット装置などの装置に設けられる運動制御用の回転軸の回転量、又は当該装置に設けられるバルブの開閉に用いる動力伝達用の回転軸の回転量を、絶対量としてデジタル的に計測するためのアブソリュート型のロータリーエンコーダが記載されている。
特許文献1に記載のアブソリュートエンコーダは、回転ディスク、スリット、投光素子、受光素子などの部品をシャフトの軸方向(高さ方向)に積み上げて構成される。このように、特許文献1に記載のアブソリュートエンコーダでは、複数の部品のそれぞれの軸方向寸法が、軸方向に積み重ねられているため、アブソリュートエンコーダの軸方向の寸法が大きくなり、軸方向の寸法を小さくすること、すなわちアブソリュートエンコーダの薄型化が難しいという問題がある。アブソリュートエンコーダを薄型化するために、上記の複数の部品のそれぞれを薄く形成することも考えられるが、複数の部品のそれぞれが薄くなると、部品の強度が低下し、部品が振動や衝撃を受けた際に破損しやすくなるおそれがある。
また、アブソリュートエンコーダの軸方向の寸法を小さくすると共に、アブソリュートエンコーダの軸方向と直交する方向の寸法を小さくする場合、軸方向の寸法が小さくなる場合と同様に、部品の強度低下などの問題が生じうる。このため、特許文献1に記載の技術では、アブソリュートエンコーダの軸方向の寸法を小さくすると共に、軸方向と直交する方向へのアブソリュートエンコーダの寸法を小さくことが困難である。
本発明は、上記に鑑みてなされたものであって、小型化に好適なアブソリュートエンコーダを提供することを目的とする。
本発明の実施の形態のアブソリュートエンコーダは、主軸の回転に従って回転する第1駆動歯車と、前記第1駆動歯車にかみ合う第1従動歯車と、前記第1従動歯車と同軸上に設けられ、前記第1従動歯車の回転に従って回転する第2駆動歯車とを備える。アブソリュートエンコーダは、平面視で前記第1従動歯車及び前記第2駆動歯車に対して前記第1駆動歯車とは反対側に設けられ、前記第2駆動歯車にかみ合う第2従動歯車を備える。アブソリュートエンコーダは、前記第2従動歯車の回転に従って回転する回転体の回転角を検知する角度センサを備える。
本発明に係るアブソリュートエンコーダは、小型化できる、という効果を奏する。
以下に、本発明の実施の形態に係るアブソリュートエンコーダを図面に基づいて詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。なお、図面において歯部形状は省略している。
<実施の形態>
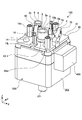
図1は、本発明の実施の形態のアブソリュートエンコーダ100がモータ200に取り付けられた状態を示す斜視図である。図1では、アブソリュートエンコーダ100のケース15の内側に設けられる部品が透過的に示される。また、図1では、XYZ座標系において、Z軸正方向を上方向とし、Z軸負方向を下方向として説明するが、Z軸正方向及びZ軸負方向は、普遍的な上下方向を意味するものではない。Z軸方向は、後述する主軸が伸びる方向に等しい。X軸方向は、Z軸方向に直交する方向の内、例えば、後述する基板位置決めピン10j及び柱10mの配列方向に等しい。Y軸方向は、Z軸方向及びX軸方向の双方に直交する方向に等しい。これらの各軸の方向の表記及び定義は、図1以降の各図においても同様である。なお、本実施の形態では、Z軸に向かってアブソリュートエンコーダ100を見ることを、平面視と称する。
図1は、本発明の実施の形態のアブソリュートエンコーダ100がモータ200に取り付けられた状態を示す斜視図である。図1では、アブソリュートエンコーダ100のケース15の内側に設けられる部品が透過的に示される。また、図1では、XYZ座標系において、Z軸正方向を上方向とし、Z軸負方向を下方向として説明するが、Z軸正方向及びZ軸負方向は、普遍的な上下方向を意味するものではない。Z軸方向は、後述する主軸が伸びる方向に等しい。X軸方向は、Z軸方向に直交する方向の内、例えば、後述する基板位置決めピン10j及び柱10mの配列方向に等しい。Y軸方向は、Z軸方向及びX軸方向の双方に直交する方向に等しい。これらの各軸の方向の表記及び定義は、図1以降の各図においても同様である。なお、本実施の形態では、Z軸に向かってアブソリュートエンコーダ100を見ることを、平面視と称する。
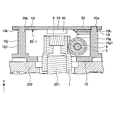
図2は、図1に示されるアブソリュートエンコーダ100からケース15及び取付ねじ16が取り外された状態を示す斜視図である。図2では、基板20の下面20-1に設けられる複数の部品が透過的に示される。図3は、図2に示されるアブソリュートエンコーダ100から基板20及び基板取付ねじ13が取り外された状態を示す斜視図である。図4は、図3に示されるアブソリュートエンコーダ100がモータ200に取り付けられた状態の斜視図からモータ200及びねじ14が取り外された状態を示す斜視図である。図5は、図4に示されるメインベース10、中間ギア2などを平面視した状態を示す図である。図5には、アブソリュートエンコーダ100が備える複数の部品の内、主要な部品の配置が示される。図6は、図5に示されるアブソリュートエンコーダ100を、中間ギア2の中心を通り、かつ、X-Y平面に平行な面で切断した断面図である。
図7は、図6に示されるベアリング3が中間ギア2から外された状態を示す拡大部分断面図である。図7では、ベアリング3と中間ギア2に形成される圧入部2dとの配置関係を分かり易くするため、ベアリング3が、中間ギア2の圧入部2dから離れている。また図7では、ベアリング3とメインベース10の基部60に設けられる壁部80との配置関係を分かり易くするため、ベアリング3が、壁部80から離れている。
図8は、図5に示される主軸ギア1の中心を通り、中間ギア2の中心線に垂直な平面で図2に示すアブソリュートエンコーダ100を切断した断面図である。ただし、基板20と磁気センサ40は断面にしていない。図8には、主軸ギア1への永久磁石9の取り付け状態と、モータ軸201への主軸ギア1の取り付け状態とが示される。また図8には、主軸ギア1のウォームギア部1dと中間ギア2のウォームホイール部2aとがかみ合っている状態が示される。図8によれば、主軸ギア1に設けられた永久磁石9の上面9aが、磁気センサ40からZ軸方向に一定距離離れた位置に存在していることが分かる。
図9は、図6に示される副軸ギア5の中心を通り、中間ギア2の中心線に垂直な平面で図2に示すアブソリュートエンコーダ100を切断した断面図である。ただし、基板20と磁気センサ50は断面にしていない。図9には、ウォームホイール部5aとウォームギア部2bとがかみ合っている状態が示される。また図9には、マグネットホルダ6の軸部6bが2つのベアリング7で保持された状態と、マグネットホルダ6への永久磁石8の保持状態とが示される。また図9には、マグネットホルダ6に設けられるヘッド6cの径方向外側の表面が、ウォームギア部2bの歯先円から離れている状態が示される。また図9によれば、マグネットホルダ6に設けられた永久磁石8の表面8aが、磁気センサ50からZ軸方向に一定距離離れた位置に存在していることが分かる。また図9には、メインベース10のベアリングホルダー部10dの断面形状が示される。
図10は、図3に示される複数の部品の内、中間ギア2が除かれた状態を示す斜視図である。図11は、図10に示される壁部70からねじ12が取り外された状態と、ねじ12が取り外された後の板バネ11の状態と、板バネ11に向き合う板バネ取付面10eが設けられた壁部70とを示す斜視図である。ただし、モータ200と主軸ギア1は表示していない。
図12は、図5に示される基板位置決めピン10gの中心と、基板位置決めピン10jの中心とを通り、Z軸方向に平行な面で図2に示すアブソリュートエンコーダ100を切断した断面図である。ただし、磁気センサ40は断面にしていない。
図13は、図2に示される基板20を下面20-1側から見た図である。図14は、図1の状態からモータ200を取り除き、メインベース10の下面10-2側から見た図である。メインベース10の下面10-2は、図11に示されるメインベース10の上面側とは反対側の面である。メインベース10の下面10-2は、モータ200と向き合う面でもある。図15は、図1に示されるケース15の斜視図である。
図16は、図3に示される基板位置決めピン10gの中心と、基板位置決めピン10jの中心とを通る、Z軸方向に平行な面で図1に示されるアブソリュートエンコーダ100を切断した断面図である。ただし、モータ200と主軸ギア1、及び磁気センサ40は断面にしていない。図16では、ケース15に設けられたツメ15aが、メインベース10に設けられた凹部10aaに掛け合わされた状態と、ケース15に設けられたツメ15bが、メインベース10に設けられた凹部10abに掛け合わされた状態とが示される。図17は、図9に示される永久磁石8、マグネットホルダ6、副軸ギア5及びベアリング7の分解斜視図である。図18は、図8に示される永久磁石9、主軸ギア1及びモータ軸201の分解斜視図である。
以下では、図1から図18を参照してアブソリュートエンコーダ100の構成について詳細に説明する。アブソリュートエンコーダ100は、主軸ギア1、中間ギア2、ベアリング3、軸4、副軸ギア5、マグネットホルダ6、ベアリング7、永久磁石8、永久磁石9、メインベース10、板バネ11、ねじ12、基板取付ねじ13、及びねじ14、ケース15、取付ねじ16、基板20、マイコン21、双方向性ドライバ22、ラインドライバ23、コネクタ24、磁気センサ40、及び磁気センサ50を備える。
モータ200は、例えば、ステッピングモータ、DCブラシレスモータなどである。モータ200は、例えば、波動歯車装置などの減速機構を介して産業用などのロボットを駆動する駆動源として用いられるものである。モータ200はモータ軸201を備える。図8に示すように、モータ軸201の一端は、モータ200の筐体202からZ軸正方向に突き出ている。図1に示すように、モータ軸201の他端は、モータ200の筐体202からZ軸負方向に突き出ている。
平面視したモータ200の外形形状は、例えば、正方形状である。モータ200の外形を構成する4つの辺のそれぞれの長さは25mmである。モータ200の外形を構成する4つの辺の内、第1辺と、第1辺と平行な第2辺とは、互いにY軸と平行である。また、4つの辺の内、第1辺に隣接する第3辺と、第3辺と平行な第4辺とは、互いにX軸と平行である。また、モータ200に設けられるアブソリュートエンコーダ100は、平面視で25mm角のモータ200の外形形状に合わせて、25mm角である。
次に、アブソリュートエンコーダ100が備える複数の部品のそれぞれについて説明する。
図8に示すように、主軸ギア1は、モータ軸201と同軸に設けられる筒状部材である。主軸ギア1は、筒状の第1筒状部1aと、第1筒状部1aと同軸に第1筒状部1aのZ軸正方向側に設けられる筒状の第2筒状部1bとを備える。また主軸ギア1は、第2筒状部1bの径方向内側に設けられる第1筒状部1aと第2筒状部1bをつなぐ連通部1cと、第2筒状部1bの径方向外側に設けられるウォームギア部1dとを備える。このように連通部1cを形成することで、連通部1cが、モータ軸201へ主軸ギア1を圧入する際の空気の逃げ道として機能する。連通部1cの内径は、第1筒状部1aの内径及び第2筒状部1bの内径よりも小さい。連通部1cのZ軸負方向の端面である底面1eと、第1筒状部1aの内周面とに囲まれる空間は、主軸ギア1をモータ軸201の端部に固定するための圧入部1fである。圧入部1fは、第1筒状部1aのZ軸負方向側の端部からZ軸正方向側に向かって窪む窪みである。圧入部1fには、モータ軸201が圧入され、主軸ギア1はモータ軸201と一体となって回転する。ウォームギア部1dは、主軸ギア1のギア部である。
連通部1cのZ軸正方向の端面である底面1gと、第2筒状部1bの内周面とに囲まれる空間は、永久磁石9を固定するための磁石保持部1hである。磁石保持部1hは、第2筒状部1bのZ軸正方向側の端部からZ軸負方向側に向かって窪む窪みである。磁石保持部1hには、永久磁石9が圧入されている。磁石保持部1hに圧入された永久磁石9は、外周面が第2筒状部1bの内周面に接し、下面9bが底面1gに接する。これにより、永久磁石9の軸方向の位置決めがなされると共に、軸方向と直交する方向の位置決めがなされる。永久磁石9の軸方向は、モータ軸201の中心軸方向に等しい。
図4から図6、及び図8に示すように、ウォームギア部1dは、螺旋状に形成された歯部により構成され、中間ギア2のウォームホイール部2aとかみ合う。ウォームホイール部2aは中間ギア2のギア部である。図8では歯部の形状の図示が省略されている。ウォームギア部1dは、例えば、ポリアセタール樹脂で形成されている。ウォームギア部1dは、第1駆動歯車の一例である。
図4から図7などに示すように、中間ギア2は、メインベース10の上面上で、軸4によって回転自在に支持されている。中間ギア2の中心軸は、X-Y平面に平行である。また中間ギア2の中心軸は、平面視でX軸及びY軸のそれぞれとは平行ではない。すなわち、中間ギア2の中心軸方向は、X軸及びY軸のそれぞれが伸びる方向に対して斜めである。中間ギア2の中心軸方向が、X軸及びY軸のそれぞれが伸びる方向に対して斜めであることは、中間ギア2の中心軸がメインベース10の四辺に対して斜めに伸びていることを意味する。図4及び図5に示すように、メインベース10の四辺は、Y-Z平面に平行な第1辺301と、第1辺301と平行な第2辺302と、X-Z平面に平行で第1辺301に隣接する第3辺303と、第3辺303と平行な第4辺304とにより構成される。第1辺301は、メインベース10のX軸正方向側に設けられる辺である。第2辺302は、メインベース10のX軸負方向側に設けられる辺である。第3辺303は、メインベース10のY軸正方向側に設けられる辺である。第4辺304は、メインベース10のY軸負方向側に設けられる辺である。
アブソリュートエンコーダ100を平面視した寸法は、一例として25mm角のモータ200の寸法に合わせられている。そのため、X-Y平面に平行に配置される中間ギア2が、メインベース10の四辺に対して斜めに伸びるように設けられることによって、水平方向へのアブソリュートエンコーダ100の寸法を、小さくすることができる。水平方向は、モータ軸201の中心軸と直交する方向に等しく、またX-Y平面と平行な方向に等しい。
図3から図7などに示すように、中間ギア2は、ウォームホイール部2a、ウォームギア部2b、軸受部2c、圧入部2d、摺動部2e、底面2f、及び貫通孔2gを有する。中間ギア2は、中心軸に沿って貫通する貫通孔2gの内部に、軸4が挿通される円筒状の部材である。貫通孔2gは、中間ギア2の内周面によって囲まれる空間である。中間ギア2は、金属、樹脂などで一体的に成型された部材であり、ここでは一例として、ポリアセタール樹脂で形成されている。
ウォームホイール部2aは、主軸ギア1のウォームギア部1dがかみ合う歯車である。ウォームホイール部2aは、第1従動歯車の一例であり、かつ、中間ギア2のギア部である。ウォームホイール部2aは、図6に矢印で示す中間ギア2の軸方向Tdにおいて中間ギア2の軸方向の中央寄りの箇所に設けられている。またウォームホイール部2aは、中間ギア2の円筒部の外周部に設けられる複数の歯によって構成される。
ウォームホイール部2aの外径は、ウォームギア部1dの外径よりも小さい。ウォームホイール部2aの中心軸は、メインベース10の上面と平行であるため、ウォームホイール部2aの外径が小さくなることにより、アブソリュートエンコーダ100のZ軸方向(高さ方向)における小型化が可能である。
ウォームギア部2bは、螺旋状に形成された歯部によって構成され、ウォームホイール部2aと同軸上に隣接して設けられる。またウォームギア部2bは、中間ギア2の円筒部の外周部に設けられている。ウォームギア部2bが、副軸ギア5に設けられたウォームホイール部5aとかみ合うことによって、中間ギア2の回転力が副軸ギア5に伝達される。ウォームギア部2bは、第2駆動歯車の一例であり、かつ、中間ギア2のギア部である。ウォームホイール部5aは、副軸ギア5のギア部である。ウォームホイール部5aの中心線とウォームギア部2bの中心線とは、ウォームホイール部5aの中心線に垂直、かつ、ウォームギア部2bの中心線に垂直な方向から見たとき、互いに直交している。
ウォームギア部2bの外径は、アブソリュートエンコーダ100のZ軸方向(高さ方向)における小型化を可能にするために、可能な範囲で小さい値に設定されている。
図6に示すように、軸受部2cは、中間ギア2の圧入部2d側とは反対側、すなわち中間ギア2の摺動部2e側において、中間ギア2の径方向内側の内周面に設けられている。軸受部2cには軸4が摺動可能に挿通され、中間ギア2は、軸4によって回転自在に支持される。
圧入部2dは、ウォームギア部2bの内側において、中間ギア2の端面から中間ギア2の軸方向Tdの中央に向かって窪む窪みであり、貫通孔2gに連通している。圧入部2dは、貫通孔2gの端部の開口径を大きくした部分と解釈することもできる。圧入部2dには、ベアリング3の外輪3aが圧入され、固定されている。
図4から図6、図10、図11などに示すように、中間ギア2の摺動部2eは、中間ギア2の一端側、すなわち中間ギア2の軸方向Tdにおけるウォームギア部2b側とは反対側に設けられる。中間ギア2の摺動部2eは、板バネ11の摺動部11aに当接する。板バネ11は、弾性部材の一例であり、例えば金属製である。板バネ11の摺動部11aは、板バネ11の基部11dから二股状に分かれた2つの分岐体で構成される。板バネ11の基部11dは、板バネ11の全体の内、取付部11bと摺動部11aとの間に設けられる板状の部材である。
板バネ11の摺動部11aを構成する2つの分岐体の間には、軸4の直径より大きな隙間が形成されている。そのため、2つの分岐体は軸4を跨ぎ、軸4と接触しないように板バネ11の取付部11bが、メインベース10の壁部72に配設された板バネ取付面10eへ、ねじ12によって固定される。
板バネ11の摺動部11aは、中間ギア2が組み付けられた後に中間ギア2の摺動部2eと向き合う位置に設けられる。中間ギア2の摺動部2eは、板バネ11の摺動部11aに当接し押圧されることによって、軸4の中心軸に沿って、軸4の一端4a側から軸4の他端4b側に向かう方向に付勢される。この状態で中間ギア2が回転したとき、中間ギア2の摺動部2eは、板バネ11の摺動部11aと当接しながら摺動する。
中間ギア2の底面2fは、圧入部2dの隣に位置しており、ベアリング3の外輪3aの側面3cと接する。外輪3aは、外輪3aの側面3cが底面2fに接するまで、圧入部2dに圧入される。
中間ギア2の貫通孔2gは、軸受部2cから圧入部2dに向かって、中間ギア2の中心軸に沿って貫通しており、軸4と同軸上に配置されている。貫通孔2gの内径は、軸4の外径よりも大きいため、貫通孔2gと軸4の外周面との間には空間が確保されている。
図6及び図7に示すように、ベアリング3は、外輪3a、内輪3b、側面3c、及び側面3dを有する。ベアリング3の側面3cは、図6に矢印で示す軸4の軸方向Tdにおける外輪3aの側面であり、ベアリング3の側面3dは、当該方向における内輪3bの側面である。なお、本発明の実施の形態においては、中間ギア2または軸4の(中心)軸方向についてTdと記す。
ベアリング3の外輪3aは、圧入部2dに圧入されて固定されており、側面3cは、底面2fに接して固定されている。内輪3bの内側には軸4が挿入されている。図6に示すように内輪3bの側面3dは、メインベース10の壁部80の当接面10cに当接している。当接面10cは、中間ギア2の軸方向Tdの位置を規定している。前述のように、中間ギア2は、板バネ11によって、軸4の一端4aから軸4の他端4b側に向かう軸方向Tdに付勢されているため、中間ギア2の底面2fに接しているベアリング3の外輪3aの側面3cも同方向に付勢されている。これにより、ベアリング3の内輪3bも同方向に付勢されて、ベアリング3の内輪3bの側面3dが壁部80の当接面10cに当接する。その結果、付勢力が壁部80の当接面10cに伝えられ、中間ギア2は、軸4の軸方向Tdに安定して支持される。付勢力の詳細については後述する。
ベアリング3の外輪3aは、内輪3bに対して回転自在に設けられている。このため、中間ギア2は、図6に示される中間ギア2の軸受部2cとベアリング3との2箇所で、軸4によって回転自在に支持されている。なお軸4は、例えば、ステンレス鋼で形成される。
図6に示すように、壁部70及び壁部80は、軸4を介して中間ギア2を回転自在に保持する保持部の一例である。壁部80は、壁部70と対をなすように、基部60の上面に一体的に設けられ、基部60の上面からZ軸正方向に伸びる。壁部80は、平面視で、基部60の上面全体の内、X軸方向の中央よりも第2辺302側、かつ、Y軸方向の中央よりも第3辺303側の領域に設けられる。また壁部80は、当該領域の内、第2辺302寄りの位置に設けられると共に、Y軸方向の中央寄りに設けられる。壁部70、壁部80及び軸4は、中間ギア2を回転自在に保持する保持部として機能する。軸4は、円柱状の部材であり、一端4aと他端4bを有する。軸4の他端4bは、メインベース10の壁部80に形成された孔10bに圧入された上で、固定されている。一方、軸4の一端4aは、壁部70に形成された孔10aに挿入された上で位置決めされていればよく、軸4の一端4aが孔10aへ圧入される必要はない。このように軸4の一端4aが孔10aに圧入ではなく挿入されることによって、軸4の一端4aが孔10aに圧入される場合に比べて、軸4の組み立てが容易になる。
図5などに示すように、アブソリュートエンコーダ100では、副軸ギア5は、中間ギア2の主軸ギア1側とは反対側に設けられている。例えば、副軸ギア5は、メインベース10の四辺に囲まれる領域の内、メインベース10の角部に近い領域に配置される。当該角部は、例えば、図5に示される第2辺302と第3辺303とが交わる部分である。このように、副軸ギア5と主軸ギア1とは、メインベース10上の限られた領域を利用して、中間ギア2を挟むように配置されている。これにより、副軸ギア5と主軸ギア1とが中間ギア2を挟むことなく互いに隣接して配置される場合に比べて、副軸ギア5から主軸ギア1までの距離を広げることが可能となる。
磁気センサ40は、主軸ギア1と共に回転する永久磁石9の回転による永久磁石9が発生する磁束の変化を検出することにより、対応する主軸ギア1の回転角度を検出する事が出来る。一方、磁気センサ50は、副軸ギア5と共に回転する永久磁石8の回転による永久磁石8が発生する磁束の変化を検出することにより、対応する副軸ギア5の回転角度を検出する事が出来る。
ここで、例えば、主軸ギア1と副軸ギア5が互いに隣接して配置される場合、永久磁石8及び永久磁石9のそれぞれで発生した磁束の一部が、永久磁石8及び永久磁石9のそれぞれに対応していない磁気センサに影響を与える、いわゆる磁気干渉について述べる。
図19は、主軸ギア1が回転した時に、主軸ギア1に設けられた永久磁石9より発生している磁束を磁気センサ40で検出した波形(A)と、副軸ギア5に設けられた永久磁石8より発生している磁束を磁気センサ50で検出した波形(B)と、磁気センサ40が、永久磁石9より発生している磁束を検出しつつ、これに加えて永久磁石8より発生している磁束の一部を漏れ磁束として重畳して検出した場合の磁気干渉波形(C)との概念を表した図である。縦軸は磁束を表し、横軸は主軸ギア1の回転角度を表す。このように、磁気センサ40においては、(A)の波形を検出することが望ましいところ、磁気干渉が発生した場合は、(C)に示すような波形となり、正確な波形を検出する事ができなくなる。
同様に、図20は、主軸ギア1が回転した時に、副軸ギア5に設けられた永久磁石8より発生している磁束を磁気センサ50で検出した波形(A)と、主軸ギア1に設けられた永久磁石9より発生している磁束を磁気センサ40で検出した波形(B)と、磁気センサ50が、永久磁石8より発生している磁束を検出しつつ、これに加えて永久磁石9より発生している磁束の一部を漏れ磁束として重畳して検出した場合の磁気干渉波形(C)との概念を表した図である。縦軸は磁束を表し、横軸は副軸ギア5の回転角度を表す。このように、磁気センサ50においては、(A)の波形を検出することが望ましいところ、磁気干渉が発生した場合は、(C)に示すような波形となり、正確な波形を検出する事ができなくなる。
従って、本実施の形態に係るアブソリュートエンコーダ100によれば、主軸ギア1及び永久磁石9と、副軸ギア5及び永久磁石8とが、中間ギア2を挟んで互いに距離をおいて配置されていることから、永久磁石8及び永久磁石9のそれぞれで発生した磁束の一部が、永久磁石8及び永久磁石9のそれぞれに対応していない磁気センサに影響を与える磁気干渉の発生を低減できる。例えば、副軸ギア5に設けられた永久磁石8で発生した磁束の変化を検出する事を本来の目的として設けられた磁気センサ50に、主軸ギア1に設けられた永久磁石9で発生した磁束の一部が、漏れ磁束として干渉することを低減できる。また、永久磁石9で発生した磁束の変化を検出する事を本来の目的として設けられた磁気センサ40に、副軸ギア5に設けられた永久磁石8で発生した磁束の一部が漏れ磁束として干渉することを低減できる。
このように、本実施の形態に係るアブソリュートエンコーダ100によれば、アブソリュートエンコーダ100を平面視したときの寸法を相対的に小さくしながら、磁気センサ50による副軸ギア5の回転角度又は回転量の検出精度の低下を防ぐことができる。またアブソリュートエンコーダ100によれば、アブソリュートエンコーダ100を平面視したときの寸法を相対的に小さくしながら、磁気センサ40による主軸ギア1の回転角度又は回転量の検出精度の低下を防ぐことができる。
図9に示すように、副軸ギア5は、マグネットホルダ6の軸部6bに圧入されて固定される円筒状の部材である。副軸ギア5は、ウォームホイール部5aと貫通孔5bとを有する。副軸ギア5は、金属又は樹脂で一体的に成型された部材であり、ここでは一例として、ポリアセタール樹脂で形成されている。
ウォームホイール部5aは、ウォームギア部2bがかみ合う歯車である。ウォームホイール部5aは、第2従動歯車の一例である。ウォームホイール部5aは、副軸ギア5の円筒部の外周部に設けられる複数の歯によって構成される。図4において、中間ギア2が回転することによって、中間ギア2の回転力は、ウォームギア部2bとウォームホイール部5aを介して、副軸ギア5に伝達される。
貫通孔5bは、円筒状の副軸ギア5の中心軸に沿って貫通する孔である。貫通孔5bには、マグネットホルダ6の軸部6bが圧入され、副軸ギア5はマグネットホルダ6と一体となって回転する。
図9に示すように、マグネットホルダ6は、マグネット保持部6a、軸部6b、及びヘッド6cを有する。マグネットホルダ6は、金属又は樹脂で一体的に成型された部材であり、ここでは一例として、非磁性のステンレス鋼で形成されている。
メインベース10に形成されたベアリングホルダー部10dの内周面10dcに、2つのベアリング7の外輪7aが圧入されている。なお、2つのベアリング7のそれぞれは、外輪7a及び内輪7bを有している。
マグネットホルダ6の軸部6bは円柱状の部材であり、副軸ギア5の貫通孔5bに圧入され、軸部6bの下部は、2つのベアリング7の内輪7bに挿入されている。よって、マグネットホルダ6は、2つのベアリング7によってメインベース10に対して軸支され、副軸ギア5と一体となって回転する。
また、マグネットホルダ6の上端にはヘッド6cが設けられる。ヘッド6cは、有底円筒状の部材である。ヘッド6cにはマグネット保持部6aが形成される。マグネット保持部6aは、ヘッド6cの上端面から下方向側に向かって窪む窪みである。マグネット保持部6aに配置された永久磁石8の外周面は、ヘッド6cの内周面に接する。これにより、ヘッド6cのマグネット保持部6aに永久磁石8が固定される。
メインベース10に形成されたベアリングホルダー部10dに配設された2つのベアリング7によってマグネットホルダ6の軸部6bが軸支されることで、マグネットホルダ6の傾きを防止することができる。よって、2つのベアリング7は、軸部6bの軸方向においてできるだけ距離を離して配置すると、よりマグネットホルダ6の傾きを防止する効果が望める。
図9に示すように、ベアリングホルダー部10dの上部10dbは、ベアリングホルダー部10d全体の内、Z軸方向におけるベアリングホルダー部10dの上側領域である。ベアリングホルダー部10dの上部10dbの内側には、1つのベアリング7が設けられている。また、ベアリングホルダー部10dの下部10daは、ベアリングホルダー部10d全体の内、Z軸方向におけるベアリングホルダー部10dの下側領域である。ベアリングホルダー部10dの下部10daの内側には、1つのベアリング7が設けられている。
図9に示すように、モータ200の筐体202の一部には、切り欠き部202aが設けられている。切り欠き部202aは、Z軸負方向側に向かって窪む窪みである。メインベース10には、ベアリングホルダー部10dの下部10daが突出して設けられているため、モータ200の筐体202に切り欠き部202aを設けることによって、互いの干渉を防いでいる。ベアリングホルダー部10dの下部10daは、ベアリングホルダー部10d全体の内、Z軸方向におけるベアリングホルダー部10dの下側領域である。ベアリングホルダー部10dの下部10daの内側には、1つのベアリング7が設けられている。このように、モータ200の筐体202に切り欠き部202aを設けることによって、切り欠き部202aが設けられていない場合に比べ、2つのベアリング7のZ軸方向の距離を離して設置することを可能としている。また、ベアリングホルダー部10dの上部10dbは、ベアリングホルダー部10d全体の内、Z軸方向におけるベアリングホルダー部10dの上側領域である。
マグネットホルダ6の軸部6bの軸方向において、よりマグネット保持部6a及び永久磁石8に近い位置にベアリング7を設置すると、マグネットホルダ6及び永久磁石8の回転時の軸ブレを低減することができる。一方、ベアリングホルダー部10dの上部10dbの外径は中間ギア2に近接していることから、ベアリングホルダー部10dの上部10dbに斜面を形成することで中間ギア2の歯先円との干渉を避けつつ、よりマグネット保持部6a及び永久磁石8に近い位置にベアリング7を設置することを可能としている。
磁気センサ40は、主軸ギア1と共に回転する永久磁石9の回転による永久磁石9が発生する磁束の変化を検出することにより、対応する主軸ギア1の回転角度を検出する事が出来る。一方、磁気センサ50は、副軸ギア5と共に回転する永久磁石8の回転による永久磁石8が発生する磁束の変化を検出することにより、対応する副軸ギア5の回転角度を検出する事が出来る。
図9、図17に示すように永久磁石8は、表面8aを有する。永久磁石8は略円柱状であり、永久磁石8の中心軸MC1(永久磁石8の中心を表す軸、又は、磁極の境界の中心を通る軸)は、マグネットホルダ6の中心軸HC1、副軸ギア5の中心軸GC1及びベアリング7の中心軸BCと一致している。永久磁石8の表面8aは、磁気センサ50の表面50aから一定距離を隔てて、向き合っている。このように各中心軸を一致させることで、より高精度に回転角又は回転量を検出することが可能となる。
なお、本実施形態においては、図17に示すように、永久磁石8の2つの磁極(N/S)は、永久磁石8の中心軸MC1に対して垂直な平面(X-Y平面)内で隣り合うように形成される。すなわち、中心軸MC1において、永久磁石8の回転中心と磁極の境界の中心が一致することが望ましい。これにより、さらに回転角又は回転量の検出精度が向上する。
図8、図18に示すように、永久磁石9は、主軸ギア1の磁石保持部1hの内部に圧入される略円柱状の永久磁石であり、上面9a及び下面9bを有する。上面9aは、磁気センサ40の表面40aから一定距離を隔てて、向き合っている。下面9bは、主軸ギア1の磁石保持部1hの底面1gと接し、主軸ギア1の中心軸GC2方向における位置(Z軸方向における位置)を規定する。永久磁石9の中心軸MC2(永久磁石9の中心を表す軸、又は、磁極の境界の中心を通る軸)は、主軸ギア1の中心軸GC2及びモータ軸201の中心軸RCと一致している。このように各中心軸を一致させることで、より高精度に回転角又は回転量を検出することが可能となる。
なお、本実施形態においては、永久磁石9の2つの磁極(N/S)は、永久磁石9の中心軸MC2に対して垂直な平面(X-Y平面)内で隣り合うように形成されることが望ましい。これにより、さらに回転角又は回転量の検出精度が向上する。
なお、永久磁石8及び永久磁石9のそれぞれは、例えばフェライト系、Nd(ネオジム)-Fe(鉄)-B(ホウ素)系などの磁性材料から形成される。永久磁石8及び永久磁石9のそれぞれは、例えば樹脂バインダを含むゴム磁石、ボンド磁石などであってもよい。
図13には、基板20に形成される複数の貫通孔である位置決め孔20a、位置決め孔20b、孔20c、孔20d、及び孔20eが示される。位置決め孔20aを形作る壁面の形状は、例えば円である。位置決め孔20bを形作る壁面の形状は、例えば楕円である。孔20c、孔20d、及び孔20eのそれぞれは、図2に示す基板取付ねじ13によって、基板20を、メインベース10へ固定するための貫通孔である。孔20c、孔20d及び孔20eのそれぞれを形作る壁面の形状は、例えば円である。孔20c、孔20d及び孔20eのそれぞれを形作る壁面の直径は、基板取付ねじ13の雄ねじ部の直径よりも大きく、かつ、基板取付ねじ13の頭部の直径よりも小さい。
図3から図6、図10から図12などに示すように、メインベース10は、孔10a、孔10b、当接面10c、ベアリングホルダー部10d、板バネ取付面10e、基部60、壁部70、壁部80、開口部10-1、及びねじ孔10fを有する。メインベース10は、基板位置決めピン10g、基板位置決めピン10j、先端部10h、先端部10k、柱10m、柱10q、柱10s、ねじ孔10u、ねじ孔10v、及びねじ孔10wを有する。基板位置決めピン10g、基板位置決めピン10j、柱10m、柱10q、及び柱10sは、柱状部材の一例である。メインベース10からZ軸方向に伸びる基板位置決めピン10gの先端部10hと、基板位置決めピン10gの基部10g1との間には、段差部10iが形成されている。基板位置決めピン10gの先端部10hが、基板20に形成される位置決め孔20aに挿入されたとき、基板20の下面20-1と段差部10iとの間には、隙間が形成される。同様に、メインベース10からZ軸方向に伸びる基板位置決めピン10jの先端部10kと、基板位置決めピン10jの基部10j1との間には、段差部10lが形成されている。基板位置決めピン10jの先端部10kが、基板20に形成される位置決め孔20bに挿入されたとき、基板20の下面20-1と段差部10lとの間には、隙間が形成される。このように、2本の基板位置決めピン10g,10jを用いた場合、基板20のZ軸方向と直交する方向の位置は規定される。しかしながら、段差部10i及び段差部10lのそれぞれから基板20までの間に隙間が形成されるため、2本の基板位置決めピン10g,10jによっては、基板20のZ軸方向の位置が規定されることはない。
メインベース10の基部60は、例えば、一体的に成型されたアルミダイキャストの部材であり、平面視で略正方形の板状の部材である。基部60は、プレート部の一例である。基部60は、モータ200の上面に取り付けられる。
図3に示す開口部10-1は、基部60を厚さ方向(Z軸方向)に貫通している。開口部10-1には、主軸ギア1が挿通される。開口部10-1は、第1貫通孔の一例である。
図4、図5、図10、図11などに示すように、壁部70は、壁部71及び壁部72を有する。壁部70は、軸4を支持すると共に板バネ11を固定する機能を有する。壁部71は、基部60の上面に一体的に設けられ、基部60からZ軸正方向に伸びる。壁部70は、平面視で、基部60の上面全体の内、X軸方向の中央よりも第1辺301側、かつ、Y軸方向の中央よりも第4辺304側の領域に設けられる。壁部71は、X軸正方向側に位置する取付面10adと、X軸方向に貫通するねじ孔10aeとを有する。図1、図14、及び図15に示すように、取付ねじ16が、ケース15の孔15dに挿通され、ねじ孔10aeにねじ留めされることによって、壁部71の取付面10adにケース15の内面が当接し固定される。
図5に示すように、壁部72は、平面視で、基部60の上面全体の内、X軸方向の中央よりも第1辺301側、かつ、Y軸方向の中央よりも第3辺303側の領域に設けられる。壁部72は、壁部71に接続されると共に、壁部71から第3辺303の中央付近に向かって伸びる。壁部72の第3辺303側の端部は、柱10sに接続される。壁部72に接続される柱10sは、メインベース10のX軸方向の中央寄りの位置に設けられると共に、メインベース10の第3辺303寄りの位置に設けられる。このように、壁部72は、壁部71から柱10sに向かって伸びる。すなわち、壁部72は、平面視で、X軸及びY軸のそれぞれに対して、斜めの方向に伸びる。
図11に示すように、板バネ11の取付部11bに形成された孔11cにねじ12が挿通され、メインベース10の壁部72に形成されたねじ孔10fへ、ねじ留めされる。これにより、板バネ11の取付部11bが、壁部72に形成された板バネ取付面10eに当接して、板バネ11が壁部72に固定される。壁部72は、板バネ11が固定される固定部として機能する。この時、図5及び図6に示すように、軸4が挿入された中間ギア2の摺動部2eには、板バネ11の摺動部11aが当接する。
図6に示される取付角度θについて説明する。主軸ギア1のウォームギア部1dは、ウォームホイール部2aにかみ合わされているため、主軸ギア1のウォームギア部1dの回転に伴って、中間ギア2には、軸4の他端4bから軸4の一端4aに向かう方向、又は、軸4の一端4aから軸4の他端4bに向かう方向に、第1スラスト力が発生する。さらに、ウォームギア部2bの、副軸ギア5のウォームホイール部5aへのかみ合いによっても、中間ギア2には、軸4の他端4bから軸4の一端4aに向かう方向、又は、軸4の一端4aから軸4の他端4bに向かう方向に、第2スラスト力が発生する。このように、第1スラスト力及び第2スラスト力が発生した場合でも、主軸ギア1のウォームギア部1dの回転量を副軸ギア5のウォームホイール部5aへ正確に伝達するためには、軸4の軸方向Tdへの中間ギア2の移動を抑制する必要がある。板バネ11は、軸4の一端4aから軸4の他端4bに向かう方向に、中間ギア2に付勢力を与える。板バネ11により発生する付勢力は、軸4の他端4bから軸4の一端4aに向かう方向の第1スラスト力と第2スラスト力とを合計した力よりも、高い値に設定されている。
図6において、取付角度θは、軸4に中間ギア2が挿入されていない状態で、メインベース10の壁部72へ固定された板バネ11の基部11dと、軸4の一端4aが挿入される壁部72の孔10aが形成された面の中間ギア2側の側面73とが成す角度に等しい。なお、本実施の形態における側面73と軸4は直交する角度となっているが、この限りでなくとも良い。この取付角度θは、中間ギア2を軸4へ組み込んだ際、中間ギア2の摺動部2eに板バネ11の摺動部11aが当接して板バネ11が所定量たわむことで、中間ギア2に対して軸4の軸方向Tdへの付勢力を適切に与えるような角度に設定されている。よって、板バネ11が軸4の一端4a側から軸4の他端4b側に向かう方向へ中間ギア2を付勢することによって、軸4の他端4bから軸4の一端4aに向かう方向の第1スラスト力と第2スラスト力とを合計した力による中間ギア2の移動が抑制される。その結果、副軸ギア5の回転精度の低下を防ぐことができる。なお、付勢力が大きくなるほど、図6に示される中間ギア2が回転する際の摺動抵抗が増加してしまう。そのため、中間ギア2が回転する際の摺動抵抗を必要最小限にしながら、スラスト力による中間ギア2の移動を抑制できるような充分な付勢力が発生するように、取付角度θを適切な値に設定することが望ましい。このように取付角度θを適切な値に設定するためには、板バネ11が取り付けられる板バネ取付面10eの面精度を高めると共に、壁部70の基部60への取付角度の誤差を小さくする必要がある。
本実施の形態に係るアブソリュートエンコーダ100では、メインベース10がアルミダイキャストで形成されているため、例えば板金によって、個別に製作された基部60と壁部70とが互いに組み合わされる場合に比べて、壁部70の基部60への取付角度の誤差を小さくでき、板バネ取付面10eの面精度が高くなる。その結果、板バネ11の壁部72への取付角度θの誤差が小さくなり、付勢力の管理が容易化される。
図10に示すように、メインベース10は、3本のねじ14が、メインベース10に形成された3箇所の孔に挿通され、モータ200に形成されたねじ孔にねじ留めされることによって固定される。メインベース10からZ軸正方向に伸びる柱10q、柱10m及び柱10sのZ軸正方向先端側には、それぞれ、ねじ孔10v、ねじ孔10u及びねじ孔10wが形成される。各々のねじ孔10v、ねじ孔10u及びねじ孔10wには、図2に示す基板20に形成される孔20c、孔20e及び孔20dへ挿通された基板取付ねじ13がそれぞれねじ留めされる。これにより、柱10q、柱10m及び柱10sのそれぞれの上端面10r、上端面10p及び上端面10tが、図12に示す基板20の下面20-1と接する。基板20の下面20-1は、基板20が有するZ軸方向の2つの基板面の内、メインベース10と向き合う面である。その結果、基板20のZ軸方向の位置が規定される。
図1、図14から図16などに示されるように、ケース15は、上面部15-1、第1側面部15A、第2側面部15B、第3側面部15C、及び第4側面部15Dを備え、一面が開口している箱形状の部材である。ケース15は、例えば樹脂製であり、一体成型された部材である。上面部15-1は、箱形状の部材の底部に相当する。上面部15-1は、図2に示される基板20の上面20-2と向き合う面である。基板20の上面20-2は、基板20の下面20-1側とは反対側の基板面である。第1側面部15Aは、上面部15-1のX軸正方向側の辺部から、Z軸負方向に伸びる板状部材である。第2側面部15Bは、上面部15-1のX軸負方向側の辺部から、Z軸負方向に伸びる板状部材である。第3側面部15Cは、上面部15-1のY軸負方向側の辺部から、Z軸負方向に伸びる板状部材である。第4側面部15Dは、上面部15-1のY軸正方向側の辺部から、Z軸負方向に伸びる板状部材である。ケース15を平面視した形状は、モータ200を平面視した形状に対応した矩形状である。ケース15の内側の空間には、アブソリュートエンコーダ100が備える複数の部品が収容される。
図15に示すように、ケース15は、ツメ15a、ツメ15b、ツメ15c、孔15d、凹部15e、凹部15f、凹部15g、コネクタケース部15h、及び開口部15iを有する。ツメ15aは、第4側面部15DのZ軸負方向の端部寄りに設けられる。ツメ15aは、第3側面部15Cと向き合うように、第4側面部15DからY軸負方向に伸びる。ツメ15aは、図14に示すメインベース10に設けられた凹部10aaに掛け合わされる。ツメ15bは、第3側面部15CのZ軸負方向の端部寄りに設けられる。ツメ15bは、第4側面部15Dと向き合うように、第3側面部15CからY軸正方向に伸びる。ツメ15bは、図14に示すメインベース10に設けられた凹部10abに掛け合わされる。ツメ15cは、第2側面部15BのZ軸負方向の端部寄りに設けられる。ツメ15cは、第1側面部15Aと向き合うように、第2側面部15BからX軸負方向に伸びる。ツメ15cは、図14に示すメインベース10に設けられた凹部10acに掛け合わされる。
図15に示される凹部15e、凹部15f及び凹部15gは、図2に示される3つの基板取付ねじ13のそれぞれの頭部との干渉を避けるために、ケース15の上面5-1の一部がZ軸正方向に向かって窪むように形成された窪みである。
コネクタケース部15hは、図2に示されるコネクタ24を覆うために、ケース15の上面5-1の一部がZ軸正方向に向かって窪むように形成された窪みである。平面視したときのコネクタケース部15hの底面の形状は、長方形である。コネクタケース部15hは、上面5-1の内、X軸方向の中央よりも第1側面部15A側、かつ、Y軸方向の中央付近の領域に設けられる。またコネクタケース部15hは、当該領域の内、第1側面部15A寄りの部分に設けられる。
開口部15iは、コネクタケース部15hの底面と第1側面部15Aとの間に形成される。コネクタケース部15hの底面と向き合うように、図2に示されるコネクタ24が配置される。コネクタ24は、例えば、雌型コネクタであり、コネクタ24には、外部配線の一端に設けられる雄型コネクタが挿入される。当該雄型コネクタは、図15に示す開口部15iを介して、コネクタケース部15hに配置されたコネクタ24に挿入される。これにより、コネクタ24に設けられる導電性端子に、外部配線の一端に設けられる雄型コネクタの導電性端子が電気的に接続される。その結果、外部配線の他端に接続される外部装置とコネクタ24とが電気的に接続され、アブソリュートエンコーダ100と外部装置との間で信号の伝送が可能となる。
また、コネクタケース部15hが第1側面部15A寄りの位置に設けられることによって、図2に示すように、コネクタ24を平面視したときの位置は、モータ200を平面視したときのコネクタ400の位置と等しくなる。このようにアブソリュートエンコーダ100を構成することによって、コネクタ24に設けられる導電性ピンに電気的に接続される外部配線が引き出される位置を、コネクタ400に設けられる導電性ピンに電気的に接続される外部配線が引き出される位置に近づけることができる。従って、これらの外部配線を、アブソリュートエンコーダ100とモータ200との近くで、1つに束ねることができ、このようにした束ねられた配線群を、外部機器まで引き回すことが容易になる。
図13に示すように、基板20の下面20-1には、磁気センサ40、磁気センサ50、マイコン21、双方向性ドライバ22、及びラインドライバ23が設けられる。基板20の下面20-1は、磁気センサ40及び磁気センサ50のマウント面である。前述したように、基板20の下面20-1には、柱10qの上端面10r、柱10mの上端面10p、及び柱10sの上端面10tが接する。そして、図4に示すように、柱10q、柱10m及び柱10sは、メインベース10を平面視したときの互いの離隔距離の差が小さくなるように、メインベース10に設けられている。例えば、柱10qは、メインベース10のY軸方向の中央付近において、第2辺302寄りに設けられる。柱10qは壁部80と一体化されている。柱10mは、第1辺301と第4辺304とが交わる角部の近くに設けられる。柱10sは、メインベース10のX軸方向の中央付近において、第3辺303寄りに設けられる。柱10sは壁部70及び基板位置決めピン10gと一体化されている。このように、柱10q、柱10m及び柱10sが設けられることによって、基板20に設けられた磁気センサ40及び磁気センサ50のそれぞれのZ軸方向の位置を正確に規定できる。なお、柱10q、柱10m及び柱10sは、メインベース10においてX-Y平面方向において、それぞれできるだけ離れた場所に形成すると、基板20の位置をより安定して保持することができる。
本実施の形態に係るアブソリュートエンコーダ100では、メインベース10がダイキャストで形成されている。そのため、例えば板金によってメインベース10の基部60を製作し、柱10q、柱10m、柱10s、基板位置決めピン10g、基板位置決めピン10j、壁部70、壁部80などを個別に製作して組み立てた場合に比べて、各部品間の位置精度が向上する。また、製作時の部品点数が少なくなることによって、アブソリュートエンコーダ100の構造を簡素化でき、組立が容易となって製造時間を短縮することができ、アブソリュートエンコーダ100の信頼性を高めることができる。
磁気センサ40は、主軸角度センサの一例である。磁気センサ40は、永久磁石9の真上に所定の間隔を隔てて配置されている。磁気センサ40は、主軸ギア1と共に回転する永久磁石9の回転による永久磁石9から発生する磁束の変化を検出することにより、対応する主軸ギア1の回転角度を検出及び特定し、特定した回転角度を示す角度情報を、デジタル信号として出力する。
磁気センサ50は、角度センサの一例である。また、副軸ギア5は、第2従動歯車であるウォームホイール部5aの回転に従って回転する回転体である。磁気センサ50は、永久磁石8の真上に所定の間隔を隔てて配置されている。磁気センサ50は、副軸ギア5と共に回転する永久磁石8の回転による永久磁石8から発生する磁束の変化を検出することにより、対応する副軸ギア5の回転角度を検出及び特定し、特定した回転角度を示す角度情報を、デジタル信号として出力する。
磁気センサ40及び磁気センサ50のそれぞれは、例えば、磁束の変化を検知する検知素子と、この検知素子の出力に基づいて回転角度を表すデジタル信号を出力する演算回路と、を備える。検知素子は、例えばホールエレメント、GMR(Giant Magneto Resistive)エレメントなどの磁界検知要素を複数組み合わせたものでもよい。磁界検知要素の数量は例えば4つである。
主軸ギア1のウォームギア部1dの条数が4であり、中間ギア2のウォームホイール部2aの歯数が20である場合には、減速比は5である。すなわち、主軸ギア1が5回転すると中間ギア2は1回転する。また、中間ギア2のウォームギア部2bの条数が1であり、副軸ギア5のウォームホイール部5aの歯数が18である場合には、減速比は18である。すなわち、中間ギア2が18回転すると副軸ギア5は1回転する。従って、主軸ギア1が90回転すると、中間ギア2は90÷5=18回転し、副軸ギア5は18÷18=1回転する。
主軸ギア1と副軸ギア5には、それぞれ一体となって回転する永久磁石9及び8が設けられている。そのため、それぞれに対応した磁気センサ40及び磁気センサ50が、主軸ギア1と副軸ギア5の回転角度を検出することにより、モータ軸201の回転量を特定できる。主軸ギア1が1回転すると、副軸ギア5は、1/90回転、すなわち4度回転する。このため、副軸ギア5の回転角度が4度未満の場合、主軸ギア1の回転量は1回転未満であり、副軸ギア5の回転角度が4度以上8度未満のとき、主軸ギア1の回転量は1回転以上かつ2回転未満である。このようにアブソリュートエンコーダ100では、副軸ギア5の回転角度に応じて主軸ギア1の回転数を特定できる。特にアブソリュートエンコーダ100は、ウォームギア部1dとウォームホイール部2aとの減速比と、ウォームギア部2bとウォームホイール部5aとの減速比とを利用することにより、主軸ギア1の回転数が複数回転であっても、主軸ギア1の回転数を特定できる。
マイコン21、双方向性ドライバ22、ラインドライバ23、及びコネクタ24は、基板20に実装されている。マイコン21、双方向性ドライバ22、ラインドライバ23、及びコネクタ24は、基板20上のパターン配線によって電気的に接続されている。
マイコン21は、CPU(Central Processing Unit:中央演算処理装置)で構成され、磁気センサ40及び磁気センサ50のそれぞれから出力される回転角度を表すデジタル信号を取得し、主軸ギア1の回転量を演算する。
双方向性ドライバ22は、コネクタ24に接続される外部装置との間で双方向の通信を行う。双方向性ドライバ22は、操作信号などのデータを差動信号に変換して外部装置との間で通信を行う。ラインドライバ23は、回転量を表すデータを差動信号に変換し、差動信号をコネクタ24に接続される外部装置にリアルタイムで出力する。コネクタ24には、外部装置のコネクタが接続される。
図21は、マイコン21の機能構成を示す図である。図21に示すマイコン21の各ブロックは、マイコン21としてのCPUがプログラムを実行することによって実現されるファンクション(機能)を表したものである。
マイコン21は、回転角取得部21p、回転角取得部21q、テーブル処理部21b、回転量特定部21c、及び出力部21eを備える。回転角取得部21qは、磁気センサ40から出力された信号をもとに主軸ギア1の回転角度Aqを取得する。回転角度Aqは、主軸ギア1の回転角度を示す角度情報である。回転角取得部21pは、磁気センサ50から出力された信号をもとに副軸ギア5の回転角度Apを取得する。回転角度Apは、副軸ギア5の回転角度を示す角度情報である。テーブル処理部21bは、回転角度Apと、回転角度Apに対応する主軸ギア1の回転数とを格納した対応関係テーブルを参照して、取得した回転角度Apに対応する主軸ギア1の回転数を特定する。回転量特定部21cは、テーブル処理部21bによって特定された主軸ギア1の回転数と、取得した回転角度Aqとに応じて主軸ギア1の複数回転にわたる回転量を特定する。出力部21eは、特定された主軸ギア1の複数回転にわたる回転量を、当該回転量を示す情報に変換して出力する。
以上に説明したように、本実施の形態に係るアブソリュートエンコーダ100では、図5などに示すように、副軸ギア5が中間ギア2の主軸ギア1側とは反対側に設けられているため、永久磁石8及び永久磁石9のそれぞれに対応していない磁気センサに影響を与える磁気干渉の発生を低減できる。このように、アブソリュートエンコーダ100は、磁気干渉の発生を低減できる構造を採用することによって、アブソリュートエンコーダ100を平面視したときの寸法を相対的に小さくできる。従って、アブソリュートエンコーダ100の小型化を図りながら、磁気センサ40及び磁気センサ50のそれぞれによる磁束の検出精度の低下を防ぐことができる。
また本実施の形態に係るアブソリュートエンコーダ100では、メインベース10の上面と平行に配置される中間ギア2が、メインベース10の四辺に対して斜めに伸びており、さらに中間ギア2に対して主軸ギア1と副軸ギア5とが、互いに中間ギア2の反対側に設けられている。このため、メインベース10の上面の全体領域の内、一部の狭い領域に主軸ギア1、中間ギア2、及び副軸ギア5を配置でき、水平方向に対するアブソリュートエンコーダ100の寸法を小さくできる。
また、本実施の形態に係るアブソリュートエンコーダ100では、ウォームホイール部2aの外径と、ウォームギア部2bの外径とは、可能な範囲で小さな値に設定されている。これにより、アブソリュートエンコーダ100のZ軸方向(高さ方向)における寸法を小さくできる。
このように、本実施の形態に係るアブソリュートエンコーダ100によれば、主軸ギア1の回転量の検出精度の低下を防ぎながら、Z軸方向の寸法と、Z軸方向と直交する方向の寸法とを小さくできるという効果を奏する。
また、本実施の形態に係るアブソリュートエンコーダ100では、壁部80及び壁部72のそれぞれに固定又は挿入された軸4に対して、中間ギア2が軸支、すなわち回転可能に支持されているが、中間ギア2を軸支できれば、中間ギア2の支持方法はこれに限定されない。
例えばアブソリュートエンコーダ100は、軸4の一端4aが壁部72に形成された孔10aに挿入され、軸4の他端4bが壁部80に形成された孔10bに圧入で固定されるように構成される。さらに、アブソリュートエンコーダ100は、ベアリング3の外輪3aが中間ギア2に形成される圧入部2dに圧入で固定され、ベアリング3の内輪3bに軸4が圧入で固定されるように構成してもよい。これにより、軸4に固定された中間ギア2の軸方向Tdへの移動が制限される。このようにアブソリュートエンコーダ100を構成した場合でも、中間ギア2が軸4によって回転自在に支持される。さらに、壁部72及び壁部80によって軸4の軸方向Tdへの移動が制限されると共に、軸4に固定されるベアリング3の内輪3bによって中間ギア2の軸方向Tdへの移動も制限される。従って、板バネ11が不要になる。
他にも、例えばアブソリュートエンコーダ100は、図6に示すベアリング3を用いずに、軸4に中間ギア2が固定された状態で、壁部72及び壁部80の少なくとも一方に設けられた不図示のベアリングによって、軸4が回転自在に支持されるように構成してもよい。
不図示のベアリングの外輪が壁部72又は壁部80に固定され、内輪に軸4の一端4a又は他端4bが挿入された場合、軸4に中間ギア2が固定され、軸4は不図示のベアリングに軸支されていることから、軸4と中間ギア2は一体となって回転することが可能となる。この場合、軸4はベアリングの内輪に固定されてはおらず、内輪に挿入されているだけなので、軸4は中間ギア2と共に軸方向Tdへ移動可能となっている。その為、中間ギア2を軸方向Tdへ付勢し、位置を規定する為の板バネ11が必要となる。
あるいは、不図示のベアリングの外輪が壁部72又は壁部80に固定され、不図示の内輪に軸4の一端4a又は他端4bが圧入されてもよい。この時、軸4に固定された中間ギア2の軸方向Tdへの移動が制限される。そのため、不図示のベアリングによって軸4に固定される中間ギア2が回転可能に支持されるだけでなく、軸4の軸方向Tdへの移動が制限されるため、中間ギア2の軸方向Tdへの移動も制限される。従って、板バネ11が不要になる。
なお、図8に示すように、第1従動歯車であるウォームホイール部2aの直径Dは、第1駆動歯車であるウォームギア部1dの軸方向高さH以下である。
なお、以上の実施の形態に示した構成は、本発明の内容の一例を示すものであり、別の公知の技術と組み合わせることも可能であるし、本発明の要旨を逸脱しない範囲で、構成の一部を省略、変更することも可能である。
本国際特許出願は2018年11月30日に出願した日本国特許出願第2018-225877号に基づきその優先権を主張するものであり、日本国特許出願第2018-225877号の全内容を本願に援用する。
1 主軸ギア、1a 第1筒状部、1b 第2筒状部、1c 連通部、1d ウォームギア部、1e 底面、1f 圧入部、1g 底面、1h 磁石保持部、2 中間ギア、2a ウォームホイール部、2b ウォームギア部、2c 軸受部、2d 圧入部、2e 摺動部、2f 底面、2g 貫通孔、3 ベアリング、3a 外輪、3b 内輪、3c 側面、3d 側面、4 軸、4a 一端、4b 他端、5 副軸ギア、5-1 上面、5a ウォームホイール部、5b 貫通孔、6 マグネットホルダ、6a マグネット保持部、6b 軸部、6c ヘッド、7 ベアリング、7a 外輪、7b 内輪、8 永久磁石、8a 表面、9 永久磁石、9a 上面、9b 下面、10 メインベース、10-1 開口部、10-2 下面、10a 孔、10aa,10ab,10ac 凹部、10ad 取付面、10ae ねじ孔、10b 孔、10c 当接面、10d ベアリングホルダー部、10da 下部、10db 上部、10dc 内周面、10e 板バネ取付面、10f ねじ孔、10g 基板位置決めピン、10g1 基部、10h 先端部、10i 段差部、10j 基板位置決めピン、10j1 基部、10k 先端部、10l 段差部、10m 柱、10p 上端面、10q 柱、10r 上端面、10s 柱、10t 上端面、10u,10v,10w ねじ孔、1 板バネ、11a 摺動部、11b 取付部、11c 孔、11d 基部、12 ねじ、13 基板取付ねじ、14 ねじ、15 ケース、15-1 上面部、15A 第1側面部、15B 第2側面部、15C 第3側面部、15D 第4側面部、15a,15b,15c ツメ、15d 孔、15e,15f,15g 凹部、15h コネクタケース部、15i 開口部、16 取付ねじ、20 基板、20-1 下面、20-2 上面、20a,20b 位置決め孔、20c,20d,20e 孔、21 マイコン、21b テーブル処理部、21c 回転量特定部、21e 出力部、21p,21q 回転角取得部、22 双方向性ドライバ、23 ラインドライバ、24 コネクタ、40 磁気センサ、40a 表面、50 磁気センサ、50a 表面、60 基部、70 壁部、71 壁部、72 壁部、73 側面、80 壁部、100 アブソリュートエンコーダ、200 モータ、201 モータ軸、202 筐体、202a 切り欠き部、301 第1辺、302 第2辺、303 第3辺、304 第4辺、400 コネクタ、Td 中間ギア2または軸4の軸方向、D ウォームホイール部2aの直径、H ウォームギア部1dの軸方向高さ。
Claims (10)
- 主軸の回転に従って回転する第1駆動歯車と、
前記第1駆動歯車にかみ合う第1従動歯車と、
前記第1従動歯車と同軸上に設けられ、前記第1従動歯車の回転に従って回転する第2駆動歯車と、
平面視で前記第1従動歯車及び前記第2駆動歯車に対して前記第1駆動歯車とは反対側に設けられ、前記第2駆動歯車にかみ合う第2従動歯車と、
前記第2従動歯車の回転に従って回転する回転体の回転角を検知する角度センサと、
を備える、アブソリュートエンコーダ。 - 前記主軸の回転角を検知する主軸角度センサをさらに備える、請求項1に記載のアブソリュートエンコーダ。
- 前記第1駆動歯車はウォームギアであり、
前記第1従動歯車はウォームホイールであり、
前記第1従動歯車の外径は前記第1駆動歯車の外径より小さい、請求項1又は2に記載のアブソリュートエンコーダ。 - 前記第1従動歯車の直径は、前記第1駆動歯車の軸方向高さ以下である請求項1又は2に記載のアブソリュートエンコーダ。
- プレート部の表面上で前記第1従動歯車及び前記第2駆動歯車を保持する保持部を有するメインベースをさらに備え、
前記第1従動歯車及び前記第2駆動歯車の軸方向は、前記プレート部の厚さ方向に対して垂直であり、
前記第1駆動歯車及び前記第2従動歯車の軸方向は、前記第1従動歯車及び前記第2駆動歯車の軸方向に対して垂直である、請求項1から4の何れか一項に記載のアブソリュートエンコーダ。 - 前記保持部は、前記プレート部の表面に設けられ、前記プレート部と一体である、請求項5に記載のアブソリュートエンコーダ。
- 前記プレート部は平面視で矩形状であり、
前記第1従動歯車及び前記第2駆動歯車の軸は、前記プレート部の四辺に対して斜め方向に伸びている、請求項5又は6に記載のアブソリュートエンコーダ。 - 前記第1従動歯車及び前記第2駆動歯車が前記第1駆動歯車及び前記第2従動歯車の回転によって受ける前記第1従動歯車及び前記第2駆動歯車の軸方向に生じる力よりも大きな付勢力であって、前記軸方向に生じる力とは反対方向の付勢力を、前記第1従動歯車及び前記第2駆動歯車に与える弾性部材をさらに備える、請求項5から7の何れか一項に記載のアブソリュートエンコーダ。
- 前記保持部は、前記弾性部材が固定される固定部を備える、請求項8に記載のアブソリュートエンコーダ。
- 前記プレート部と向き合う基板面を有し、前記基板面に前記角度センサ及び前記主軸の回転角を検知する主軸角度センサが設けられる基板と、
前記プレート部と一体に設けられ、前記プレート部から前記基板に向かって伸び、先端部が基板を支持する複数の柱状部材と、
をさらに備える、請求項5から9の何れか一項に記載のアブソリュートエンコーダ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/295,201 US11561117B2 (en) | 2018-11-30 | 2019-11-21 | Absolute encoder for detecting rotation angle |
| CN201980078235.3A CN113167602B (zh) | 2018-11-30 | 2019-11-21 | 绝对编码器 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018225877A JP7137449B2 (ja) | 2018-11-30 | 2018-11-30 | アブソリュートエンコーダ |
| JP2018-225877 | 2018-11-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020110901A1 true WO2020110901A1 (ja) | 2020-06-04 |
Family
ID=70852982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/045610 WO2020110901A1 (ja) | 2018-11-30 | 2019-11-21 | アブソリュートエンコーダ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11561117B2 (ja) |
| JP (1) | JP7137449B2 (ja) |
| CN (1) | CN113167602B (ja) |
| TW (1) | TWI796532B (ja) |
| WO (1) | WO2020110901A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7316075B2 (ja) * | 2019-03-28 | 2023-07-27 | ミネベアミツミ株式会社 | アブソリュートエンコーダ |
| JP7441061B2 (ja) * | 2020-01-31 | 2024-02-29 | ミネベアミツミ株式会社 | アブソリュートエンコーダ、アブソリュートエンコーダの角度誤差情報出力プログラム、アブソリュートエンコーダの角度誤差情報出力方法 |
| KR20230084877A (ko) * | 2021-12-06 | 2023-06-13 | 삼성전기주식회사 | 회전체 감지 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09291982A (ja) * | 1996-04-24 | 1997-11-11 | Matsushita Electric Ind Co Ltd | バックラッシュ除去装置 |
| JP2004077483A (ja) * | 2002-08-19 | 2004-03-11 | Stegmann Gmbh & Co Kg | マルチターン・角度測定器 |
| US20110247440A1 (en) * | 2008-10-31 | 2011-10-13 | William Lyle Warke | Worm gear clutch mechanism |
| JP2013002571A (ja) * | 2011-06-17 | 2013-01-07 | Ricoh Co Ltd | 駆動装置及びこれを備えた画像形成装置 |
| JP2018087774A (ja) * | 2016-11-29 | 2018-06-07 | ミネベアミツミ株式会社 | アブソリュートエンコーダ、回転量を特定する方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0496019U (ja) | 1991-01-14 | 1992-08-20 | ||
| DE19855960A1 (de) * | 1998-12-04 | 2000-06-08 | Bosch Gmbh Robert | Vorrichtung und Verfahren zur Messung der Winkellage eines drehbaren Körpers |
| JP3920113B2 (ja) * | 2002-03-05 | 2007-05-30 | アルプス電気株式会社 | 回転角検出装置 |
| US7922181B2 (en) * | 2006-03-09 | 2011-04-12 | Honda Motor Co., Ltd. | Vehicle height adjusting system |
| JP2007298291A (ja) * | 2006-04-27 | 2007-11-15 | Tokai Rika Co Ltd | 回転角度検出装置 |
| US7841231B2 (en) * | 2006-07-25 | 2010-11-30 | Lg Innotek Co., Ltd. | Steering angle sensing apparatus and method thereof |
| JP2008202762A (ja) * | 2007-02-22 | 2008-09-04 | Aisin Ai Co Ltd | 磁気センサ装置を備えた変速機 |
| KR101333604B1 (ko) | 2007-04-19 | 2013-11-28 | 고쿠사이 게이소쿠키 가부시키가이샤 | 만능 시험 장치, 직동 액추에이터, 및 비틀림 시험 장치 |
| JP5256174B2 (ja) * | 2009-11-19 | 2013-08-07 | 山洋電気株式会社 | 磁気式アブソリュートエンコーダ |
| JP6050649B2 (ja) * | 2012-10-22 | 2016-12-21 | 日本電産サンキョー株式会社 | ギアードモータ |
| JP5862616B2 (ja) | 2013-07-17 | 2016-02-16 | ウシオ電機株式会社 | 光配向用偏光光照射装置及び光配向用偏光光照射方法 |
| JP5701351B2 (ja) * | 2013-09-03 | 2015-04-15 | 株式会社ツバキE&M | 直交型ギアモータ |
| US10415670B2 (en) * | 2017-05-09 | 2019-09-17 | Astronova, Inc. | Worm drive |
-
2018
- 2018-11-30 JP JP2018225877A patent/JP7137449B2/ja active Active
-
2019
- 2019-11-21 WO PCT/JP2019/045610 patent/WO2020110901A1/ja active Application Filing
- 2019-11-21 US US17/295,201 patent/US11561117B2/en active Active
- 2019-11-21 CN CN201980078235.3A patent/CN113167602B/zh active Active
- 2019-11-27 TW TW108143080A patent/TWI796532B/zh active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09291982A (ja) * | 1996-04-24 | 1997-11-11 | Matsushita Electric Ind Co Ltd | バックラッシュ除去装置 |
| JP2004077483A (ja) * | 2002-08-19 | 2004-03-11 | Stegmann Gmbh & Co Kg | マルチターン・角度測定器 |
| US20110247440A1 (en) * | 2008-10-31 | 2011-10-13 | William Lyle Warke | Worm gear clutch mechanism |
| JP2013002571A (ja) * | 2011-06-17 | 2013-01-07 | Ricoh Co Ltd | 駆動装置及びこれを備えた画像形成装置 |
| JP2018087774A (ja) * | 2016-11-29 | 2018-06-07 | ミネベアミツミ株式会社 | アブソリュートエンコーダ、回転量を特定する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113167602B (zh) | 2023-08-15 |
| JP2020085866A (ja) | 2020-06-04 |
| TW202028700A (zh) | 2020-08-01 |
| US11561117B2 (en) | 2023-01-24 |
| TWI796532B (zh) | 2023-03-21 |
| JP7137449B2 (ja) | 2022-09-14 |
| CN113167602A (zh) | 2021-07-23 |
| US20220018690A1 (en) | 2022-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110869708B (zh) | 绝对编码器 | |
| WO2020203466A1 (ja) | 減速機構及びアブソリュートエンコーダ | |
| WO2020110901A1 (ja) | アブソリュートエンコーダ | |
| JP7316077B2 (ja) | アブソリュートエンコーダ | |
| JP2023133628A (ja) | アブソリュートエンコーダ | |
| JP2024026598A (ja) | アブソリュートエンコーダ | |
| WO2020203199A1 (ja) | アブソリュートエンコーダ | |
| JP7277190B2 (ja) | アブソリュートエンコーダ | |
| WO2020196533A1 (ja) | アブソリュートエンコーダ | |
| CN116964417A (zh) | 绝对编码器 | |
| JP7303655B2 (ja) | アブソリュートエンコーダ | |
| JP7202239B2 (ja) | アブソリュートエンコーダ | |
| JP4460048B2 (ja) | 磁気式エンコーダ | |
| JP2008111808A (ja) | トルク検知センサ | |
| JP2009276241A (ja) | 回転角検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19891217 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19891217 Country of ref document: EP Kind code of ref document: A1 |