JP6800565B2 - 適合化予測のために広域的シーンコンテクストを使用する方法およびシステム並びに対応するプログラム、該システムを備えた乗り物 - Google Patents
適合化予測のために広域的シーンコンテクストを使用する方法およびシステム並びに対応するプログラム、該システムを備えた乗り物 Download PDFInfo
- Publication number
- JP6800565B2 JP6800565B2 JP2015127465A JP2015127465A JP6800565B2 JP 6800565 B2 JP6800565 B2 JP 6800565B2 JP 2015127465 A JP2015127465 A JP 2015127465A JP 2015127465 A JP2015127465 A JP 2015127465A JP 6800565 B2 JP6800565 B2 JP 6800565B2
- Authority
- JP
- Japan
- Prior art keywords
- prediction
- context
- vehicle
- information
- traffic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000006978 adaptation Effects 0.000 title claims description 57
- 238000000034 method Methods 0.000 title claims description 50
- 230000006399 behavior Effects 0.000 claims description 94
- 230000033001 locomotion Effects 0.000 claims description 37
- 238000004364 calculation method Methods 0.000 claims description 34
- 238000012545 processing Methods 0.000 claims description 27
- 238000004590 computer program Methods 0.000 claims description 8
- 230000008878 coupling Effects 0.000 claims 2
- 238000010168 coupling process Methods 0.000 claims 2
- 238000005859 coupling reaction Methods 0.000 claims 2
- 230000008859 change Effects 0.000 description 20
- 230000008569 process Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 10
- 238000004891 communication Methods 0.000 description 9
- 230000001133 acceleration Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 6
- 238000013459 approach Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000007796 conventional method Methods 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 230000003542 behavioural effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000008014 freezing Effects 0.000 description 1
- 238000007710 freezing Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4045—Intention, e.g. lane change or imminent movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/408—Traffic behavior, e.g. swarm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/55—External transmission of data to or from the vehicle using telemetry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Analytical Chemistry (AREA)
- Mathematical Physics (AREA)
- Chemical & Material Sciences (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
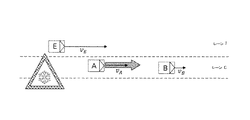
・交通参加者の検出されたコンステレーション(constellation、配置)、たとえば隣接レーン上の2つの乗り物、または
・認識されたインフラストラクチャ要素、たとえば走行方向にある高速道路入り口
B = {レーン − 変更 − 左、レーン − 変更 − 右、追従 − レーン} (3)

Claims (9)
- 少なくとも一つのデータ取得手段および処理手段を備える乗り物のドライバを支援するための方法であって、
前記データ取得手段によって、交通環境を表現するデータを取得するステップと、
前記取得したデータに基づいて間接的インジケータと直接的インジケータとを算出するステップであって、前記間接的インジケータは、対象物体の将来移動挙動が予測される交通シーンに関する情報を与えるものであって且つ予測されるべき前記将来移動挙動が開始される前に観測可能な指標であり、前記直接的インジケータは、変数を提供するものであって、検出対象である挙動が既に開始されたときに且つその場合にのみ観測可能な指標であるステップと、
実際の交通状況について少なくとも一つの対象物体の将来移動挙動を、コンテクストベース予測と物理的予測とを用いて予測することにより、予測情報を生成するステップであって、コンテクストベース予測では、前記少なくとも一つの対象物体が一組の可能性のある将来移動挙動の一つを実行する確率が一組の複数の分類器の重み付け結合により算出され、前記分類器のそれぞれは、間接的インジケータの異なる組み合わせを用いるものであり、前記物理的予測は、前記直接的インジケータに依拠して前記コンテクストベース予測の結果を検証するものであるステップと、
前記予測情報を出力するステップと、
を含む方法において、
前記交通環境を表現する前記データから広域的シーンコンテクストデータを生成するステップであって、広域的シーンコンテクストは、前記予測情報の生成の基礎を構成する交通シーンの中の全ての交通参加者について有効なコンテクストであり、前記広域的シーンコンテクストデータは、前記広域的シーンコンテクストを示すものであるステップと、
前記広域的シーンコンテクストデータに基づき、前記予測情報を前記広域的シーンコンテクストに適合させるための予測適合化情報を、
−前記コンテクストベース予測の状況モデルにおけるそれぞれの間接的インジケータについて、前記予測適合化情報として、前記間接的インジケータのインジケータ値を修正するための変倍値又は前記間接的インジケータの算出に用いられるパラメータについての変倍値であって、それぞれが真に一つの間接的インジケータに対応している変倍値を生成すること、
−前記間接的インジケータの算出の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、
−前記コンテクストベース予測の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、および、
−前記物理的予測の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、
の少なくとも一つを実行することにより生成するステップと、
を備え、
前記予測情報を生成するステップでは、
−前記変倍値により、前記インジケータ値及び又は前記パラメータを修正すること、
−前記予測適合化情報(14)により、前記間接的インジケータの算出の結果を適合させること、
−前記予測適合化情報により、前記コンテクストベース予測の結果を適合させること、および、
−前記予測適合化情報(14)により、前記物理的予測の結果を適合させること、
の少なくとも一つを実行することにより、前記予測情報が適合化される、
ことを特徴とする方法。 - 前記広域的シーンコンテクストデータを生成するステップでは、
前記乗り物に搭載された少なくとも一つの局所センサによって取得されるセンサデータから広域的シーンコンテクストを推定するステップ、および、
前記乗り物の外部から受け取られたデータから前記広域的シーンコンテクストを推定するステップ、
のうちの少なくとも一つを実行することを特徴とする、請求項1に記載の方法。 - センサデータから広域的シーンコンテクストを推定する前記ステップでは、前記少なくとも一つのセンサが他の乗り物の挙動及び又は状態を記録することにより前記広域的シーンコンテクストデータが生成され、該記録された挙動からの交通状態の判定が実行される、
ことを特徴とする、請求項2に記載の方法。 - 乗り物のドライバを支援するためのシステムであって、
交通環境を表現するデータを取得するよう構成された少なくとも一つのデータ取得手段と、
前記取得したデータに基づいて間接的インジケータと直接的インジケータとを算出する手段であって、前記間接的インジケータは、対象物体の将来移動挙動が予測される交通シーンに関する情報を与えるものであって且つ予測されるべき前記将来移動挙動が開始される前に観測可能な指標であり、前記直接的インジケータは、変数を提供するものであって、検出対象である挙動が既に開始されたときに且つその場合にのみ観測可能な指標である手段と、
実際の交通状況について少なくとも一つの対象物体の将来移動挙動を、コンテクストベース予測と物理的予測とを用いて予測することにより、予測情報を生成するよう構成された処理手段であって、コンテクストベース予測では、前記少なくとも一つの対象物体が一組の可能性のある将来移動挙動の一つを実行する確率が一組の複数の分類器の重み付け結合により算出され、前記分類器のそれぞれは、間接的インジケータの異なる組み合わせを用いるものであり、前記物理的予測は、前記直接的インジケータに依拠して前記コンテクストベース予測の結果を検証するものである手段と、
を備えるシステムにおいて、
前記処理手段は、前記交通環境を表現する前記データから広域的シーンコンテクストデータを生成するよう構成され、広域的シーンコンテクストは、前記予測情報の生成の基礎を構成する交通シーンの中の全ての交通参加者について有効なコンテクストであり、前記広域的シーンコンテクストデータは、前記広域的シーンコンテクストを示すものであり、
前記処理手段は、前記広域的シーンコンテクストデータに基づき、前記予測情報を前記広域的シーンコンテクストに適合化させるための予測適合化情報を、
−前記コンテクストベース予測の状況モデルにおけるそれぞれの間接的インジケータについて、前記予測適合化情報として、前記間接的インジケータのインジケータ値を修正するための変倍値又は間接的インジケータの算出に用いられるパラメータについての変倍値であって、それぞれが真に一つの間接的インジケータに対応している変倍値を生成すること、
−前記間接的インジケータの算出の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、
−前記コンテクストベース予測の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、および、
−前記物理的予測の結果を直接的に適合させるよう構成され且つ意図された前記予測適合化情報を生成すること、
の少なくとも一つを実行することにより生成するよう構成され、かつ、
前記処理手段は、
−前記変倍値により、前記インジケータ値及び又は前記パラメータを修正すること、
−前記予測適合化情報(14)により、前記間接的インジケータの算出の結果を適合させること、
−前記予測適合化情報により、前記コンテクストベース予測の結果を適合させること、および、
−前記予測適合化情報(14)により、前記物理的予測の結果を適合させること、
の少なくとも一つを実行することにより、前記予測情報を適合化するよう構成されている、
ことを特徴とする、乗り物のドライバを支援するためのシステム。 - 前記処理手段は、前記乗り物に搭載された少なくとも一つの局所センサによって取得されるセンサデータから広域的シーンコンテクストを推定すること、および、前記乗り物の外部から受け取られたデータから前記広域的シーンコンテクストを推定すること、のうちの少なくとも一つを実行することによって広域的シーンコンテクストデータを生成するよう構成された広域的シーンコンテクスト推定ユニットを備える、
ことを特徴とする、請求項4に記載の、乗り物のドライバを支援するためのシステム。 - 前記広域的シーンコンテクスト推定ユニットは、前記少なくとも一つのセンサが他の乗り物の挙動及び又は状態を記録することにより前記広域的シーンコンテクストデータを生成するよう構成され、該記録された挙動からの交通状態の判定が実行される、
ことを特徴とする、請求項5に記載の、乗り物のドライバを支援するためのシステム。 - 請求項4から6のいずれか1項に記載のドライバ支援システムを備えた乗り物であって、
前記ドライバ支援システムは、当該ドライバ支援システムの出力信号に基づいて前記乗り物の制御に影響を与えるよう構成されている、
ことを特徴とする乗り物。 - コンピュータまたはディジタル信号プロセッサ上で実行されたときに、請求項1から3のいずれか1項に記載のステップを実行するプログラムコード手段を有する、コンピュータプログラム。
- コンピュータまたはディジタル信号プロセッサ上で実行されたときに、請求項1から3のいずれか1項に記載のステップを実行するプログラムコード手段を有するコンピュータプログラムを格納している機械読み取り可能な媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14182749.3A EP2990991A1 (en) | 2014-08-29 | 2014-08-29 | Method and system for using global scene context for adaptive prediction and corresponding program, and vehicle equipped with such system |
| EP14182749.3 | 2014-08-29 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016051467A JP2016051467A (ja) | 2016-04-11 |
| JP2016051467A5 JP2016051467A5 (ja) | 2020-06-18 |
| JP6800565B2 true JP6800565B2 (ja) | 2020-12-16 |
Family
ID=51417210
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015127465A Active JP6800565B2 (ja) | 2014-08-29 | 2015-06-25 | 適合化予測のために広域的シーンコンテクストを使用する方法およびシステム並びに対応するプログラム、該システムを備えた乗り物 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9620008B2 (ja) |
| EP (1) | EP2990991A1 (ja) |
| JP (1) | JP6800565B2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6312304B2 (ja) * | 2014-01-28 | 2018-04-18 | 三菱重工機械システム株式会社 | 位置測定方法、自己位置測定装置及び車載器 |
| JP6103716B2 (ja) * | 2014-06-17 | 2017-03-29 | 富士重工業株式会社 | 車両の走行制御装置 |
| US9836056B2 (en) * | 2015-06-05 | 2017-12-05 | Bao Tran | Smart vehicle |
| US10691958B1 (en) * | 2015-07-30 | 2020-06-23 | Ambarella International Lp | Per-lane traffic data collection and/or navigation |
| KR20170016177A (ko) * | 2015-08-03 | 2017-02-13 | 엘지전자 주식회사 | 차량 및 그 제어방법 |
| JP6429219B2 (ja) * | 2015-08-19 | 2018-11-28 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、および車両制御プログラム |
| JP6316265B2 (ja) * | 2015-12-01 | 2018-04-25 | 本田技研工業株式会社 | 車線変更制御装置 |
| US20170248434A1 (en) * | 2016-02-29 | 2017-08-31 | Blake Dearring Best | Car-top mount with population density estimation |
| DE102016002603A1 (de) * | 2016-03-03 | 2017-09-07 | Audi Ag | Verfahren zur Ermittlung und Bereitstellung einer auf eine vorbestimmte Umgebung bezogenen, Umfelddaten enthaltenden Datenbank |
| KR101786352B1 (ko) * | 2016-05-27 | 2017-11-15 | 현대자동차주식회사 | 우선순위 고려 차선 변경 제어 장치 및 방법 |
| DE102016213660A1 (de) * | 2016-07-26 | 2018-02-01 | Conti Temic Microelectronic Gmbh | Adaptiver Geschwindigkeitsregler mit Fahrzeug zu Fahrzeug Kommunikation |
| JP6415507B2 (ja) * | 2016-09-16 | 2018-10-31 | 三菱電機株式会社 | 車線変更支援装置および車線変更支援方法 |
| US10267911B2 (en) * | 2017-03-31 | 2019-04-23 | Ford Global Technologies, Llc | Steering wheel actuation |
| DE102017004826A1 (de) * | 2017-05-19 | 2018-11-22 | Lucas Automotive Gmbh | System und Verfahren zur Handhabung von Ausnahmeszenarien |
| US20180362047A1 (en) * | 2017-06-19 | 2018-12-20 | Panasonic Intellectual Property Corporation Of America | Information processing device and recording medium |
| CN109901446B (zh) | 2017-12-08 | 2020-07-07 | 广州汽车集团股份有限公司 | 路口通行控制方法、装置及系统 |
| KR102506865B1 (ko) * | 2017-12-13 | 2023-03-08 | 현대자동차주식회사 | 컷인 의도 판단 장치 및 방법 |
| US11130497B2 (en) * | 2017-12-18 | 2021-09-28 | Plusai Limited | Method and system for ensemble vehicle control prediction in autonomous driving vehicles |
| US10583839B2 (en) * | 2017-12-28 | 2020-03-10 | Automotive Research & Testing Center | Method of lane change decision-making and path planning |
| US11822009B2 (en) | 2018-03-28 | 2023-11-21 | Pioneer Corporation | Self-position estimation device, self-position estimation method, program, and recording medium |
| CN110377670B (zh) * | 2018-04-11 | 2021-11-26 | 腾讯大地通途(北京)科技有限公司 | 一种确定道路要素信息的方法、装置、介质及设备 |
| CN111942389A (zh) * | 2019-05-17 | 2020-11-17 | 罗伯特·博世有限公司 | 驾驶辅助系统及其变道确定单元和方法 |
| CN112583872B (zh) * | 2019-09-29 | 2022-05-13 | 华为云计算技术有限公司 | 一种通信方法及装置 |
| US11966852B2 (en) * | 2019-12-11 | 2024-04-23 | Shanghai United Imaging Intelligence Co., Ltd. | Systems and methods for situation awareness |
| CN113542046B (zh) * | 2020-04-21 | 2023-01-10 | 百度在线网络技术(北京)有限公司 | 一种流量预估方法、装置、设备及存储介质 |
| US11608079B2 (en) * | 2020-06-09 | 2023-03-21 | GM Global Technology Operations LLC | System and method to adjust overtake trigger to prevent boxed-in driving situations |
| US11608067B2 (en) * | 2020-08-12 | 2023-03-21 | Honda Motor Co., Ltd. | Probabilistic-based lane-change decision making and motion planning system and method thereof |
| WO2022087879A1 (zh) * | 2020-10-28 | 2022-05-05 | 华为技术有限公司 | 一种场景文件的获取方法以及装置 |
| KR20220056922A (ko) * | 2020-10-28 | 2022-05-09 | 현대자동차주식회사 | 자율주행 제어 장치 및 방법 |
| CN113393669A (zh) * | 2021-06-11 | 2021-09-14 | 阿波罗智联(北京)科技有限公司 | 交通工具的控制方法、装置、设备、介质及程序产品 |
| CN117173913B (zh) * | 2023-09-18 | 2024-02-09 | 日照朝力信息科技有限公司 | 基于不同时段车流量分析的交通控制方法及系统 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6429789B1 (en) * | 1999-08-09 | 2002-08-06 | Ford Global Technologies, Inc. | Vehicle information acquisition and display assembly |
| DE10349881A1 (de) * | 2003-10-25 | 2005-05-25 | Daimlerchrysler Ag | Verfahren und Vorrichtung zur Abstandsregelung |
| DE102004019337A1 (de) * | 2004-04-21 | 2005-11-17 | Siemens Ag | Assistenzsystem für Kraftfahrzeuge |
| DE102005005140A1 (de) * | 2005-02-04 | 2006-08-10 | Daimlerchrysler Ag | Verfahren zur Schätzwertermittlung für eine Fahrzeugumgebungszustandsgröße |
| JP4623057B2 (ja) * | 2007-06-05 | 2011-02-02 | トヨタ自動車株式会社 | 自車両の移動領域取得装置 |
| US8885039B2 (en) * | 2008-07-25 | 2014-11-11 | Lg Electronics Inc. | Providing vehicle information |
| EP2562060B1 (en) | 2011-08-22 | 2014-10-01 | Honda Research Institute Europe GmbH | A method and system for predicting movement behavior of a target traffic object |
| US9146898B2 (en) * | 2011-10-27 | 2015-09-29 | Magna Electronics Inc. | Driver assist system with algorithm switching |
| US9381916B1 (en) * | 2012-02-06 | 2016-07-05 | Google Inc. | System and method for predicting behaviors of detected objects through environment representation |
| EP2845779B1 (en) * | 2013-09-09 | 2018-08-01 | Honda Research Institute Europe GmbH | Driving assistance technique for active vehicle control |
| US9707942B2 (en) * | 2013-12-06 | 2017-07-18 | Elwha Llc | Systems and methods for determining a robotic status of a driving vehicle |
| EP2923911B1 (en) * | 2014-03-24 | 2019-03-13 | Honda Research Institute Europe GmbH | A method and system for predicting movement behavior of a target traffic object |
-
2014
- 2014-08-29 EP EP14182749.3A patent/EP2990991A1/en not_active Ceased
-
2015
- 2015-06-25 JP JP2015127465A patent/JP6800565B2/ja active Active
- 2015-07-29 US US14/812,357 patent/US9620008B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9620008B2 (en) | 2017-04-11 |
| US20160063858A1 (en) | 2016-03-03 |
| JP2016051467A (ja) | 2016-04-11 |
| EP2990991A1 (en) | 2016-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6800565B2 (ja) | 適合化予測のために広域的シーンコンテクストを使用する方法およびシステム並びに対応するプログラム、該システムを備えた乗り物 | |
| US11275382B2 (en) | Autonomous driving system | |
| US11155262B2 (en) | Vehicular mitigation system based on wireless vehicle data | |
| US10737667B2 (en) | System and method for vehicle control in tailgating situations | |
| CN108263382B (zh) | 基于目标车辆的驾驶样式的协同自适应巡航控制系统 | |
| CN108263383B (zh) | 在协同自适应巡航控制系统中控制速度的装置和方法 | |
| CN107867288B (zh) | 用于检测前向碰撞的方法 | |
| JP6375221B2 (ja) | 対象とする交通物体の移動挙動を予測するための方法及びシステム | |
| US20180345961A1 (en) | Vehicular communications network and methods of use and manufacture thereof | |
| US20180037227A1 (en) | System and method for vehicle control in tailgating situations | |
| JP4483589B2 (ja) | 車両用情報提供装置 | |
| CN108282512B (zh) | 用于使用车辆通信进行车辆控制的系统和方法 | |
| JP6219312B2 (ja) | 道路の車線の車線交通路内の車両の位置を決定する方法、並びに2つの車両間の整列及び衝突リスクを検知する方法 | |
| CN108263360B (zh) | 紧随场景下用于车辆控制的系统和方法 | |
| CN108275149B (zh) | 使用车辆通信进行合并辅助的系统和方法 | |
| CN110949375B (zh) | 信息处理系统以及服务器 | |
| CN113548045A (zh) | 用于车辆的紧急制动预备装置 | |
| CN108275152B (zh) | 车辆系统、控制车辆系统的计算机实施的方法和存储介质 | |
| US11697410B2 (en) | Vehicle-to-everything communication-based lane change collision avoidance warning | |
| US20200174474A1 (en) | Method and system for context and content aware sensor in a vehicle | |
| CN113386752A (zh) | 用于确定辅助驾驶系统中最佳巡航车道的方法和装置 | |
| JP2004322772A (ja) | 車載用電子装置 | |
| JP5146431B2 (ja) | 車両走行制御装置及び車両走行制御方法 | |
| CN110606081B (zh) | 移动体辅助系统和移动体辅助方法 | |
| JP2015156089A (ja) | 注意案内システム、方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20170802 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170804 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180215 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200501 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20200501 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6800565 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |