JP6785656B2 - カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス - Google Patents
カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス Download PDFInfo
- Publication number
- JP6785656B2 JP6785656B2 JP2016534794A JP2016534794A JP6785656B2 JP 6785656 B2 JP6785656 B2 JP 6785656B2 JP 2016534794 A JP2016534794 A JP 2016534794A JP 2016534794 A JP2016534794 A JP 2016534794A JP 6785656 B2 JP6785656 B2 JP 6785656B2
- Authority
- JP
- Japan
- Prior art keywords
- target position
- symbol
- image
- intervention
- instrument
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003780 insertion Methods 0.000 title claims description 14
- 230000037431 insertion Effects 0.000 title claims description 14
- 210000003484 anatomy Anatomy 0.000 claims description 38
- 238000000034 method Methods 0.000 claims description 35
- 230000007246 mechanism Effects 0.000 claims description 6
- 230000008569 process Effects 0.000 claims description 5
- 239000013307 optical fiber Substances 0.000 description 16
- 238000001356 surgical procedure Methods 0.000 description 15
- 239000000835 fiber Substances 0.000 description 12
- 238000003384 imaging method Methods 0.000 description 12
- 238000001574 biopsy Methods 0.000 description 11
- 230000008859 change Effects 0.000 description 11
- 238000005452 bending Methods 0.000 description 8
- 230000036544 posture Effects 0.000 description 8
- 230000037361 pathway Effects 0.000 description 7
- 230000001960 triggered effect Effects 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 5
- 238000002591 computed tomography Methods 0.000 description 4
- 239000012636 effector Substances 0.000 description 4
- 238000012014 optical coherence tomography Methods 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 230000000712 assembly Effects 0.000 description 3
- 238000000429 assembly Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 210000004072 lung Anatomy 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 239000011295 pitch Substances 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 230000001225 therapeutic effect Effects 0.000 description 3
- 206010028980 Neoplasm Diseases 0.000 description 2
- 230000004397 blinking Effects 0.000 description 2
- 210000001072 colon Anatomy 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 210000002216 heart Anatomy 0.000 description 2
- 238000003331 infrared imaging Methods 0.000 description 2
- 210000000936 intestine Anatomy 0.000 description 2
- 210000003734 kidney Anatomy 0.000 description 2
- 238000002595 magnetic resonance imaging Methods 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000002071 nanotube Substances 0.000 description 2
- 238000002432 robotic surgery Methods 0.000 description 2
- 230000005477 standard model Effects 0.000 description 2
- 238000001931 thermography Methods 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 238000001069 Raman spectroscopy Methods 0.000 description 1
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005253 cladding Methods 0.000 description 1
- 238000005352 clarification Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000003759 clinical diagnosis Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000002651 drug therapy Methods 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 238000002675 image-guided surgery Methods 0.000 description 1
- 238000002329 infrared spectrum Methods 0.000 description 1
- 230000003434 inspiratory effect Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000000608 laser ablation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 238000001454 recorded image Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 210000002345 respiratory system Anatomy 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 235000019640 taste Nutrition 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 238000002211 ultraviolet spectrum Methods 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- 238000012800 visualization Methods 0.000 description 1
- 230000001755 vocal effect Effects 0.000 description 1
- 201000009482 yaws Diseases 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
- A61B5/066—Superposing sensor position on an image of the patient, e.g. obtained by ultrasound or x-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
- A61B5/743—Displaying an image simultaneously with additional graphical information, e.g. symbols, charts, function plots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments
- A61B2010/045—Needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M2025/0166—Sensors, electrodes or the like for guiding the catheter to a target zone, e.g. image guided or magnetically guided
Description
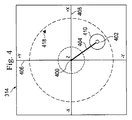
一実施形態では、患者の解剖学的構造内に介入器具を案内する方法は、患者の解剖学的構造内の標的位置を処理するステップと、患者の解剖学的構造内の第1の位置における介入器具のチップ部分の位置を受信するステップとを含む。この方法はまた、第1の位置と標的位置との間の3次元距離を測定するステップと、標的位置を表すシンボル及び介入器具のチップ部分を表すシンボルを表示するステップとを含む。
本発明の追加の態様、特徴、及び利点は、以下の詳細な説明から明らかになるであろう。
例えば、カテーテルの先端チップ姿勢の履歴が、時間間隔に亘って保存される場合に、姿勢履歴を使用して、その時間間隔に亘ってこのデバイスの形状を再構築することができる。別の例として、過去の姿勢、位置、又は向きデータは、呼吸等の交互に行われる動作サイクルに従った器具の既知の点として保存することができる。この保存データを使用して、カテーテルに関する形状情報を開発することができる。あるいはまた、カテーテルに沿って配置されたEMセンサー等の一連の位置センサーを、形状検知のために使用することができる。あるいはまた、手術中に器具上のEMセンサー等の位置センサーからの履歴データを使用して、特に解剖学的経路が略静止している場合には、器具の形状を表すことができる。あるいはまた、外部磁場により制御される位置又は向きを有する無線装置を、形状検出のために使用することができる。その位置の履歴を使用して、ナビゲートする経路の形状を判定することができる。

Claims (15)
- システムであって、当該システムは:
患者の解剖学的構造内に介入器具を案内するためのコンピュータ実行可能命令を含む非一時的なコンピュータ可読媒体を有しており、前記コンピュータ実行可能命令は:
前記患者の解剖学的構造内の標的位置を処理するための命令と;
前記患者の解剖学的構造内の位置における介入器具のチップ部分の位置を受信するための命令と;
前記チップ部分の位置と前記標的位置との間の3次元距離を測定するための命令と;
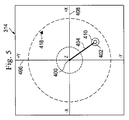
前記標的位置を表すシンボル、前記介入器具の前記チップ部分を表すシンボル、及び前記介入器具のチップ部分を表すシンボルと前記標的位置を表すシンボルとの間に延び、前記介入器具の前記チップ部分と前記標的位置との間の方向を表すシンボルを表示するための命令と;
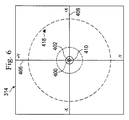
前記チップ部分の機構の展開に関して、前記介入器具の長手方向軸線回りの回転配置を示す回転補助シンボルを表示するための命令と;を含む、
システム。 - 前記チップ部分の位置と前記標的位置との間の方向を示すシンボルは、直線状のシンボルである、
請求項1に記載のシステム。 - 前記3次元距離の挿入距離の成分を表すシンボルを表示するための命令をさらに含む、
請求項1に記載のシステム。 - 前記挿入距離の成分を表すシンボルは、前記標的位置を表すシンボルと同心である、
請求項3に記載のシステム。 - 前記挿入距離の成分を表すシンボルは、前記チップ部分を表すシンボルと同心である、
請求項3に記載のシステム。 - 前記挿入距離の成分を表すシンボルのサイズが、拡大縮小可能である、
請求項3に記載のシステム。 - 前記チップ部分の位置と前記標的位置との間の前記3次元距離を変化させる際に、前記挿入距離の成分を表すシンボルのサイズを変更するための命令をさらに含む、
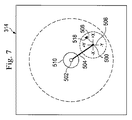
請求項3に記載のシステム。 - 前記表示するための命令は、前記標的位置及び前記チップ部分を表すシンボルを2次元座標系に表示することを含む、
請求項1に記載のシステム。 - 前記標的位置及び前記チップ部分を表すシンボルをディスプレイの第1のウィンドウに表示するための命令と、2次的な案内画像を前記ディスプレイの第2のウィンドウに表示するための命令とをさらに含む、
請求項1に記載のシステム。 - 第1のウィンドウ内の前記シンボルは、第2のウィンドウ内の前記2次的な案内画像と回転によって位置合わせされる、
請求項9に記載のシステム。 - 前記チップ部分を前記標的位置に向けて導くための方向案内情報を第2のウィンドウに表示するための命令をさらに含む、
請求項9に記載のシステム。 - 前記2次的な案内画像は、内視鏡カメラ画像又は仮想内視鏡画像である、
請求項9に記載のシステム。 - 前記2次的な案内画像は、前記標的位置にマークを含む前記患者の解剖学的構造の手術前画像又は仮想経路画像である、
請求項9に記載のシステム。 - 前記チップ部分を前記標的位置に向けて導くための方向案内情報を提供するための命令をさらに含み、前記方向案内情報は、触覚フィードバックを含む、
請求項1に記載のシステム。 - 前記チップ部分を前記標的位置に向けて導くための方向案内情報を提供するための命令をさらに含み、前記方向案内情報は、音声フィードバックを含む、
請求項1に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361866327P | 2013-08-15 | 2013-08-15 | |
| US61/866,327 | 2013-08-15 | ||
| PCT/US2014/050715 WO2015023665A1 (en) | 2013-08-15 | 2014-08-12 | Graphical user interface for catheter positioning and insertion |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019109989A Division JP6793780B2 (ja) | 2013-08-15 | 2019-06-13 | カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016529999A JP2016529999A (ja) | 2016-09-29 |
| JP2016529999A5 JP2016529999A5 (ja) | 2017-09-14 |
| JP6785656B2 true JP6785656B2 (ja) | 2020-11-18 |
Family
ID=52468625
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016534794A Active JP6785656B2 (ja) | 2013-08-15 | 2014-08-12 | カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス |
| JP2019109989A Active JP6793780B2 (ja) | 2013-08-15 | 2019-06-13 | カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019109989A Active JP6793780B2 (ja) | 2013-08-15 | 2019-06-13 | カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11800991B2 (ja) |
| EP (1) | EP3033132B1 (ja) |
| JP (2) | JP6785656B2 (ja) |
| KR (1) | KR102356881B1 (ja) |
| CN (2) | CN105451802B (ja) |
| WO (1) | WO2015023665A1 (ja) |
Families Citing this family (223)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| CN104688281B (zh) | 2006-06-13 | 2017-04-19 | 直观外科手术操作公司 | 微创手术系统 |
| US9232959B2 (en) | 2007-01-02 | 2016-01-12 | Aquabeam, Llc | Multi fluid tissue resection methods and devices |
| ES2769535T3 (es) | 2008-03-06 | 2020-06-26 | Aquabeam Llc | Ablación de tejido y cauterización con energía óptica transportada en una corriente de fluido |
| US8218847B2 (en) | 2008-06-06 | 2012-07-10 | Superdimension, Ltd. | Hybrid registration method |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20110282357A1 (en) | 2010-05-14 | 2011-11-17 | Intuitive Surgical Operations, Inc. | Surgical system architecture |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US8827948B2 (en) | 2010-09-17 | 2014-09-09 | Hansen Medical, Inc. | Steerable catheters |
| US20120191079A1 (en) | 2011-01-20 | 2012-07-26 | Hansen Medical, Inc. | System and method for endoluminal and translumenal therapy |
| CN104203078B (zh) | 2012-02-29 | 2018-04-20 | 普罗赛普特生物机器人公司 | 自动化图像引导的组织切除和处理 |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US10874466B2 (en) | 2012-06-21 | 2020-12-29 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US10646280B2 (en) | 2012-06-21 | 2020-05-12 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US10799298B2 (en) | 2012-06-21 | 2020-10-13 | Globus Medical Inc. | Robotic fluoroscopic navigation |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US10842461B2 (en) | 2012-06-21 | 2020-11-24 | Globus Medical, Inc. | Systems and methods of checking registrations for surgical systems |
| US11786324B2 (en) | 2012-06-21 | 2023-10-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11896446B2 (en) | 2012-06-21 | 2024-02-13 | Globus Medical, Inc | Surgical robotic automation with tracking markers |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US11589771B2 (en) | 2012-06-21 | 2023-02-28 | Globus Medical Inc. | Method for recording probe movement and determining an extent of matter removed |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US9566414B2 (en) | 2013-03-13 | 2017-02-14 | Hansen Medical, Inc. | Integrated catheter and guide wire controller |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US9283046B2 (en) | 2013-03-15 | 2016-03-15 | Hansen Medical, Inc. | User interface for active drive apparatus with finite range of motion |
| US10849702B2 (en) | 2013-03-15 | 2020-12-01 | Auris Health, Inc. | User input devices for controlling manipulation of guidewires and catheters |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| TR201907266T4 (tr) | 2013-03-15 | 2019-06-21 | Massachusetts Gen Hospital | İnhalasyon için nitrik oksit gaz sentezi. |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| WO2014201165A1 (en) | 2013-06-11 | 2014-12-18 | Auris Surgical Robotics, Inc. | System for robotic assisted cataract surgery |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| EP3060157B1 (en) * | 2013-10-24 | 2019-12-11 | Auris Health, Inc. | System for robotic-assisted endolumenal surgery |
| EP2923669B1 (en) | 2014-03-24 | 2017-06-28 | Hansen Medical, Inc. | Systems and devices for catheter driving instinctiveness |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US11188285B2 (en) | 2014-07-02 | 2021-11-30 | Covidien Lp | Intelligent display |
| US9633431B2 (en) | 2014-07-02 | 2017-04-25 | Covidien Lp | Fluoroscopic pose estimation |
| US9603668B2 (en) | 2014-07-02 | 2017-03-28 | Covidien Lp | Dynamic 3D lung map view for tool navigation inside the lung |
| US10772489B2 (en) | 2014-07-09 | 2020-09-15 | Acclarent, Inc. | Guidewire navigation for sinuplasty |
| US10463242B2 (en) * | 2014-07-09 | 2019-11-05 | Acclarent, Inc. | Guidewire navigation for sinuplasty |
| US9737371B2 (en) | 2014-09-30 | 2017-08-22 | Auris Surgical Robotics, Inc. | Configurable robotic surgical system with virtual rail and flexible endoscope |
| AU2015336055B2 (en) | 2014-10-20 | 2020-07-16 | The General Hospital Corporation | Systems and methods for the synthesis of nitric oxide |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US9986983B2 (en) | 2014-10-31 | 2018-06-05 | Covidien Lp | Computed tomography enhanced fluoroscopic system, device, and method of utilizing the same |
| KR20160067714A (ko) * | 2014-12-04 | 2016-06-14 | 주식회사 엘지화학 | 코폴리카보네이트 및 이를 포함하는 물품 |
| WO2016116821A1 (en) * | 2015-01-22 | 2016-07-28 | Koninklijke Philips N.V. | Robotic control of an endovascular deployment device with optical shape sensing feedback |
| US10499996B2 (en) | 2015-03-26 | 2019-12-10 | Universidade De Coimbra | Methods and systems for computer-aided surgery using intra-operative video acquired by a free moving camera |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| US10504239B2 (en) | 2015-04-13 | 2019-12-10 | Universidade De Coimbra | Methods and systems for camera characterization in terms of response function, color, and vignetting under non-uniform illumination |
| US20180132944A1 (en) * | 2015-05-18 | 2018-05-17 | Koninklijke Philips N.V. | Intra-procedural accuracy feedback for image-guided biopsy |
| CN107924459B (zh) * | 2015-06-24 | 2021-08-27 | 埃达技术股份有限公司 | 用于肾结石去除程序的交互式3d镜放置和测量的方法和系统 |
| US10702226B2 (en) | 2015-08-06 | 2020-07-07 | Covidien Lp | System and method for local three dimensional volume reconstruction using a standard fluoroscope |
| US10716525B2 (en) | 2015-08-06 | 2020-07-21 | Covidien Lp | System and method for navigating to target and performing procedure on target utilizing fluoroscopic-based local three dimensional volume reconstruction |
| US10674982B2 (en) | 2015-08-06 | 2020-06-09 | Covidien Lp | System and method for local three dimensional volume reconstruction using a standard fluoroscope |
| EP3349649B1 (en) | 2015-09-18 | 2022-03-09 | Auris Health, Inc. | Navigation of tubular networks |
| ITUB20155218A1 (it) | 2015-10-16 | 2017-04-16 | Alberto Micco | Sistema per guidare dispositivi medici |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| AU2017237252A1 (en) | 2016-03-25 | 2018-10-11 | The General Hospital Corporation | Delivery systems and methods for electric plasma synthesis of nitric oxide |
| JP7232051B2 (ja) * | 2016-03-31 | 2023-03-02 | コーニンクレッカ フィリップス エヌ ヴェ | カテーテル配置のための画像誘導ロボット |
| US10478254B2 (en) | 2016-05-16 | 2019-11-19 | Covidien Lp | System and method to access lung tissue |
| KR102387222B1 (ko) | 2016-06-30 | 2022-04-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 안내식 시술 중에 안내 정보를 디스플레이하기 위한 그래픽 사용자 인터페이스 |
| US11612384B2 (en) | 2016-06-30 | 2023-03-28 | Intuitive Surgical Operations, Inc. | Graphical user interface for displaying guidance information in a plurality of modes during an image-guided procedure |
| KR102549728B1 (ko) | 2016-07-14 | 2023-07-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격조작 의료 시스템 내의 온스크린 메뉴들을 위한 시스템들 및 방법들 |
| US11037464B2 (en) | 2016-07-21 | 2021-06-15 | Auris Health, Inc. | System with emulator movement tracking for controlling medical devices |
| US10154799B2 (en) * | 2016-08-12 | 2018-12-18 | Elucent Medical, Inc. | Surgical device guidance and monitoring devices, systems, and methods |
| US11071596B2 (en) | 2016-08-16 | 2021-07-27 | Insight Medical Systems, Inc. | Systems and methods for sensory augmentation in medical procedures |
| WO2018063528A1 (en) * | 2016-08-16 | 2018-04-05 | Insight Medical Systems, Inc. | Systems for sensory augmentation in medical procedures |
| US10398514B2 (en) | 2016-08-16 | 2019-09-03 | Insight Medical Systems, Inc. | Systems and methods for sensory augmentation in medical procedures |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| JP7029932B2 (ja) * | 2016-11-04 | 2022-03-04 | グローバス メディカル インコーポレイティッド | 器具類の深さを測定するためのシステム及び方法 |
| US11653853B2 (en) * | 2016-11-29 | 2023-05-23 | Biosense Webster (Israel) Ltd. | Visualization of distances to walls of anatomical cavities |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| WO2018129532A1 (en) * | 2017-01-09 | 2018-07-12 | Intuitive Surgical Operations, Inc. | Systems and methods for registering elongate devices to three dimensional images in image-guided procedures |
| US11793579B2 (en) | 2017-02-22 | 2023-10-24 | Covidien Lp | Integration of multiple data sources for localization and navigation |
| EP4163253A1 (en) | 2017-02-27 | 2023-04-12 | Third Pole, Inc. | Systems and methods for generating nitric oxide |
| RU2020113418A (ru) | 2017-02-27 | 2020-10-05 | Cёрд Поул, Инк. | Системы и способы получения оксида азота в амбулаторных условиях |
| MX2020010523A (es) | 2017-02-27 | 2021-02-09 | Third Pole Inc | Sistemas y metodos para generar oxido nitrico. |
| EP3596657A4 (en) | 2017-03-14 | 2021-01-13 | Universidade De Coimbra | SYSTEMS AND METHODS FOR 3D REGISTRATION OF CURVES AND SURFACES USING VARIOUS LOCAL INFORMATION |
| AU2018244318B2 (en) | 2017-03-28 | 2023-11-16 | Auris Health, Inc. | Shaft actuating handle |
| JP6704510B2 (ja) * | 2017-03-29 | 2020-06-03 | 富士フイルム株式会社 | 光音響画像生成装置 |
| US10239038B2 (en) | 2017-03-31 | 2019-03-26 | The General Hospital Corporation | Systems and methods for a cooled nitric oxide generator |
| CN108990412B (zh) | 2017-03-31 | 2022-03-22 | 奥瑞斯健康公司 | 补偿生理噪声的用于腔网络导航的机器人系统 |
| JP7314052B2 (ja) | 2017-04-07 | 2023-07-25 | オーリス ヘルス インコーポレイテッド | 患者イントロデューサのアライメント |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| US11937880B2 (en) | 2017-04-18 | 2024-03-26 | Intuitive Surgical Operations, Inc. | Graphical user interface for monitoring an image-guided procedure |
| EP3613057A4 (en) * | 2017-04-18 | 2021-04-21 | Intuitive Surgical Operations, Inc. | GRAPHIC USER INTERFACE FOR PLANNING A PROCEDURE |
| WO2018195946A1 (zh) * | 2017-04-28 | 2018-11-01 | 深圳迈瑞生物医疗电子股份有限公司 | 一种超声图像显示方法、设备及存储介质 |
| JP7189939B2 (ja) * | 2017-05-05 | 2022-12-14 | ストライカー・ユーロピアン・オペレーションズ・リミテッド | 手術ナビゲーションシステム |
| CN110603599A (zh) * | 2017-05-09 | 2019-12-20 | 波士顿科学医学有限公司 | 手术室装置、方法和系统 |
| US11529129B2 (en) | 2017-05-12 | 2022-12-20 | Auris Health, Inc. | Biopsy apparatus and system |
| EP3624668A4 (en) | 2017-05-17 | 2021-05-26 | Auris Health, Inc. | EXCHANGEABLE WORK CHANNEL |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| WO2019005872A1 (en) | 2017-06-28 | 2019-01-03 | Auris Health, Inc. | INSTRUMENT INSERTION COMPENSATION |
| US10699448B2 (en) | 2017-06-29 | 2020-06-30 | Covidien Lp | System and method for identifying, marking and navigating to a target using real time two dimensional fluoroscopic data |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| USD905104S1 (en) | 2017-07-06 | 2020-12-15 | Biosense Webster (Israel) Ltd. | Display screen or portion thereof with icon |
| FR3071396B1 (fr) * | 2017-09-22 | 2022-01-21 | Koelis | Dispositif de guidage d’instrument medical et procede correspondant |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| WO2019075074A1 (en) | 2017-10-10 | 2019-04-18 | Covidien Lp | SYSTEM AND METHOD FOR IDENTIFICATION AND MARKING OF A TARGET IN A THREE-DIMENSIONAL FLUOROSCOPIC RECONSTRUCTION |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11219489B2 (en) | 2017-10-31 | 2022-01-11 | Covidien Lp | Devices and systems for providing sensors in parallel with medical tools |
| EP3684282B1 (en) | 2017-12-06 | 2024-02-21 | Auris Health, Inc. | Systems to correct for uncommanded instrument roll |
| JP7314136B2 (ja) * | 2017-12-08 | 2023-07-25 | オーリス ヘルス インコーポレイテッド | 医療器具のナビゲーションおよびターゲット用のシステムおよび方法 |
| US11510736B2 (en) | 2017-12-14 | 2022-11-29 | Auris Health, Inc. | System and method for estimating instrument location |
| EP3684283A4 (en) | 2017-12-18 | 2021-07-14 | Auris Health, Inc. | METHODS AND SYSTEMS FOR MONITORING AND NAVIGATION OF INSTRUMENTS IN LUMINAL NETWORKS |
| US11026751B2 (en) * | 2017-12-28 | 2021-06-08 | Cilag Gmbh International | Display of alignment of staple cartridge to prior linear staple line |
| US11887236B2 (en) | 2018-01-02 | 2024-01-30 | Koninklijke Philips N.V. | Animated position display of an OSS interventional device |
| KR20190094075A (ko) * | 2018-01-15 | 2019-08-12 | 가천대학교 산학협력단 | 소화기관 내시경 시스템 |
| WO2019139356A1 (ko) * | 2018-01-15 | 2019-07-18 | 가천대학교 산학협력단 | 소화기관 내시경 시스템 |
| US10893842B2 (en) | 2018-02-08 | 2021-01-19 | Covidien Lp | System and method for pose estimation of an imaging device and for determining the location of a medical device with respect to a target |
| US10905498B2 (en) | 2018-02-08 | 2021-02-02 | Covidien Lp | System and method for catheter detection in fluoroscopic images and updating displayed position of catheter |
| US10930064B2 (en) | 2018-02-08 | 2021-02-23 | Covidien Lp | Imaging reconstruction system and method |
| MX2020008464A (es) | 2018-02-13 | 2020-12-07 | Auris Health Inc | Sistema y metodo para accionar instrumento medico. |
| KR20200139199A (ko) | 2018-03-28 | 2020-12-11 | 아우리스 헬스, 인코포레이티드 | 가변 굽힘 강성 프로파일을 갖는 의료 기구 |
| EP3773131A4 (en) | 2018-03-28 | 2021-12-15 | Auris Health, Inc. | LOCATION SENSOR RECORDING SYSTEMS AND METHODS |
| US10827913B2 (en) | 2018-03-28 | 2020-11-10 | Auris Health, Inc. | Systems and methods for displaying estimated location of instrument |
| WO2019222495A1 (en) | 2018-05-18 | 2019-11-21 | Auris Health, Inc. | Controllers for robotically-enabled teleoperated systems |
| EP3801190A4 (en) | 2018-05-30 | 2022-03-02 | Auris Health, Inc. | SYSTEMS AND METHODS FOR SENSOR-BASED BRANCH LOCATION PREDICTION |
| CN110831481B (zh) | 2018-05-31 | 2022-08-30 | 奥瑞斯健康公司 | 管状网络的基于路径的导航 |
| JP7214757B2 (ja) | 2018-05-31 | 2023-01-30 | オーリス ヘルス インコーポレイテッド | 生理学的ノイズを検出する管腔網のナビゲーションのためのロボットシステム及び方法 |
| WO2019232236A1 (en) | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Image-based airway analysis and mapping |
| EP3813714A4 (en) | 2018-06-07 | 2022-02-09 | Auris Health, Inc. | HIGH FORCE INSTRUMENT ROBOTIC MEDICAL SYSTEMS |
| US11094221B2 (en) | 2018-06-21 | 2021-08-17 | University Of Utah Research Foundation | Visual guidance system and method for posing a physical object in three dimensional space |
| KR20210024484A (ko) | 2018-06-28 | 2021-03-05 | 아우리스 헬스, 인코포레이티드 | 풀리 공유를 통합한 의료 시스템 |
| US11304692B2 (en) * | 2018-07-16 | 2022-04-19 | Cilag Gmbh International | Singular EMR source emitter assembly |
| US11705238B2 (en) | 2018-07-26 | 2023-07-18 | Covidien Lp | Systems and methods for providing assistance during surgery |
| US11071591B2 (en) | 2018-07-26 | 2021-07-27 | Covidien Lp | Modeling a collapsed lung using CT data |
| CN112804946A (zh) | 2018-08-07 | 2021-05-14 | 奥瑞斯健康公司 | 将基于应变的形状感测与导管控制相结合 |
| CN112566584A (zh) | 2018-08-15 | 2021-03-26 | 奥瑞斯健康公司 | 用于组织烧灼的医疗器械 |
| CN112566567A (zh) | 2018-08-17 | 2021-03-26 | 奥瑞斯健康公司 | 双极医疗器械 |
| US11612438B2 (en) * | 2018-09-05 | 2023-03-28 | Point Robotics Medtech Inc. | Navigation system and method for medical operation by a robotic system using a tool |
| US11864849B2 (en) | 2018-09-26 | 2024-01-09 | Auris Health, Inc. | Systems and instruments for suction and irrigation |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| KR20210073542A (ko) | 2018-09-28 | 2021-06-18 | 아우리스 헬스, 인코포레이티드 | 의료 기구를 도킹시키기 위한 시스템 및 방법 |
| US11944388B2 (en) | 2018-09-28 | 2024-04-02 | Covidien Lp | Systems and methods for magnetic interference correction |
| WO2020076447A1 (en) | 2018-10-08 | 2020-04-16 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| US11877806B2 (en) | 2018-12-06 | 2024-01-23 | Covidien Lp | Deformable registration of computer-generated airway models to airway trees |
| US11045075B2 (en) | 2018-12-10 | 2021-06-29 | Covidien Lp | System and method for generating a three-dimensional model of a surgical site |
| KR20200071392A (ko) | 2018-12-11 | 2020-06-19 | 삼성메디슨 주식회사 | 초음파 영상 장치, 그 제어 방법, 및 컴퓨터 프로그램 제품 |
| US11801113B2 (en) | 2018-12-13 | 2023-10-31 | Covidien Lp | Thoracic imaging, distance measuring, and notification system and method |
| US11617493B2 (en) | 2018-12-13 | 2023-04-04 | Covidien Lp | Thoracic imaging, distance measuring, surgical awareness, and notification system and method |
| US11950863B2 (en) | 2018-12-20 | 2024-04-09 | Auris Health, Inc | Shielding for wristed instruments |
| US11357593B2 (en) | 2019-01-10 | 2022-06-14 | Covidien Lp | Endoscopic imaging with augmented parallax |
| EP3682836A1 (en) * | 2019-01-21 | 2020-07-22 | Koninklijke Philips N.V. | Assisting in moving an insertion element within an object |
| CN113347938A (zh) | 2019-01-25 | 2021-09-03 | 奥瑞斯健康公司 | 具有加热和冷却能力的血管密封器 |
| US11625825B2 (en) | 2019-01-30 | 2023-04-11 | Covidien Lp | Method for displaying tumor location within endoscopic images |
| US11925333B2 (en) | 2019-02-01 | 2024-03-12 | Covidien Lp | System for fluoroscopic tracking of a catheter to update the relative position of a target and the catheter in a 3D model of a luminal network |
| US11564751B2 (en) | 2019-02-01 | 2023-01-31 | Covidien Lp | Systems and methods for visualizing navigation of medical devices relative to targets |
| US11744643B2 (en) | 2019-02-04 | 2023-09-05 | Covidien Lp | Systems and methods facilitating pre-operative prediction of post-operative tissue function |
| CN113613566A (zh) | 2019-03-25 | 2021-11-05 | 奥瑞斯健康公司 | 用于医疗缝合的系统和方法 |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| US11819285B2 (en) | 2019-04-05 | 2023-11-21 | Covidien Lp | Magnetic interference detection systems and methods |
| JP2022532654A (ja) | 2019-05-15 | 2022-07-15 | サード ポール,インコーポレイテッド | 一酸化窒素を生成するシステム及び方法 |
| WO2020232397A1 (en) | 2019-05-15 | 2020-11-19 | Third Pole, Inc. | Electrodes for nitric oxide generation |
| WO2020263629A1 (en) | 2019-06-27 | 2020-12-30 | Auris Health, Inc. | Systems and methods for a medical clip applier |
| CN114025700A (zh) | 2019-06-28 | 2022-02-08 | 奥瑞斯健康公司 | 控制台叠加以及其使用方法 |
| US11109928B2 (en) | 2019-06-28 | 2021-09-07 | Auris Health, Inc. | Medical instruments including wrists with hybrid redirect surfaces |
| JP2022544554A (ja) | 2019-08-15 | 2022-10-19 | オーリス ヘルス インコーポレイテッド | 複数の屈曲部を有する医療デバイス |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| US11269173B2 (en) | 2019-08-19 | 2022-03-08 | Covidien Lp | Systems and methods for displaying medical video images and/or medical 3D models |
| US11207141B2 (en) | 2019-08-30 | 2021-12-28 | Auris Health, Inc. | Systems and methods for weight-based registration of location sensors |
| US11147633B2 (en) | 2019-08-30 | 2021-10-19 | Auris Health, Inc. | Instrument image reliability systems and methods |
| US11864935B2 (en) | 2019-09-09 | 2024-01-09 | Covidien Lp | Systems and methods for pose estimation of a fluoroscopic imaging device and for three-dimensional imaging of body structures |
| US11931111B2 (en) | 2019-09-09 | 2024-03-19 | Covidien Lp | Systems and methods for providing surgical guidance |
| CN110742690A (zh) * | 2019-09-12 | 2020-02-04 | 东南大学苏州医疗器械研究院 | 一种用于配置内窥镜的方法及终端设备 |
| US11627924B2 (en) | 2019-09-24 | 2023-04-18 | Covidien Lp | Systems and methods for image-guided navigation of percutaneously-inserted devices |
| CN114502094A (zh) | 2019-09-26 | 2022-05-13 | 奥瑞斯健康公司 | 用于碰撞检测和避免的系统和方法 |
| US11737845B2 (en) | 2019-09-30 | 2023-08-29 | Auris Inc. | Medical instrument with a capstan |
| US11737835B2 (en) | 2019-10-29 | 2023-08-29 | Auris Health, Inc. | Braid-reinforced insulation sheath |
| JP2023509321A (ja) * | 2019-12-12 | 2023-03-08 | コーニンクレッカ フィリップス エヌ ヴェ | 内視鏡処置のためのガイド下解剖学的構造操作 |
| US11622698B2 (en) | 2019-12-19 | 2023-04-11 | Biosense Webster (Israel) Ltd. | Selecting cursor locations on medical image using directions from distal end of probe |
| US11744667B2 (en) | 2019-12-30 | 2023-09-05 | Cilag Gmbh International | Adaptive visualization by a surgical system |
| US11832996B2 (en) | 2019-12-30 | 2023-12-05 | Cilag Gmbh International | Analyzing surgical trends by a surgical system |
| US11776144B2 (en) | 2019-12-30 | 2023-10-03 | Cilag Gmbh International | System and method for determining, adjusting, and managing resection margin about a subject tissue |
| KR20220122703A (ko) * | 2019-12-30 | 2022-09-02 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 해부학적 경계에 대한 접근을 나타내기 위한 시스템 및 방법 |
| US11896442B2 (en) | 2019-12-30 | 2024-02-13 | Cilag Gmbh International | Surgical systems for proposing and corroborating organ portion removals |
| US11284963B2 (en) | 2019-12-30 | 2022-03-29 | Cilag Gmbh International | Method of using imaging devices in surgery |
| US11759283B2 (en) | 2019-12-30 | 2023-09-19 | Cilag Gmbh International | Surgical systems for generating three dimensional constructs of anatomical organs and coupling identified anatomical structures thereto |
| US11219501B2 (en) | 2019-12-30 | 2022-01-11 | Cilag Gmbh International | Visualization systems using structured light |
| US11648060B2 (en) | 2019-12-30 | 2023-05-16 | Cilag Gmbh International | Surgical system for overlaying surgical instrument data onto a virtual three dimensional construct of an organ |
| EP4084722A4 (en) | 2019-12-31 | 2024-01-10 | Auris Health Inc | ALIGNMENT INTERFACES FOR PERCUTANE ACCESS |
| CN114901200A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 高级篮式驱动模式 |
| KR20220123076A (ko) | 2019-12-31 | 2022-09-05 | 아우리스 헬스, 인코포레이티드 | 경피 접근을 위한 정렬 기법 |
| CN114901194A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 解剖特征识别和瞄准 |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| WO2021142472A1 (en) | 2020-01-11 | 2021-07-15 | Third Pole, Inc. | Systems and methods for nitric oxide generation with humidity control |
| US11380060B2 (en) | 2020-01-24 | 2022-07-05 | Covidien Lp | System and method for linking a segmentation graph to volumetric data |
| US11847730B2 (en) | 2020-01-24 | 2023-12-19 | Covidien Lp | Orientation detection in fluoroscopic images |
| CN111281544B (zh) * | 2020-02-26 | 2023-05-12 | 陕西中医药大学 | 体内医疗器械自动引导机器人系统及其自动引导方法 |
| CN111544113A (zh) * | 2020-04-03 | 2020-08-18 | 艾瑞迈迪医疗科技(北京)有限公司 | 手术导航中的靶点跟踪及距离动态图形化显示方法及装置 |
| EP4167920A1 (en) | 2020-06-18 | 2023-04-26 | Third Pole, Inc. | Systems and methods for preventing and treating infections with nitric oxide |
| EP4171427A1 (en) | 2020-06-29 | 2023-05-03 | Auris Health, Inc. | Systems and methods for detecting contact between a link and an external object |
| US11357586B2 (en) | 2020-06-30 | 2022-06-14 | Auris Health, Inc. | Systems and methods for saturated robotic movement |
| EP4171428A1 (en) | 2020-06-30 | 2023-05-03 | Auris Health, Inc. | Robotic medical system with collision proximity indicators |
| US11950950B2 (en) | 2020-07-24 | 2024-04-09 | Covidien Lp | Zoom detection and fluoroscope movement detection for target overlay |
| US11634891B2 (en) * | 2020-10-08 | 2023-04-25 | Deere & Company | System and method for navigating an operator to couple a self-propelled vehicle with an attachment implement therefor |
| KR102605924B1 (ko) * | 2021-04-29 | 2023-11-24 | 자이메드 주식회사 | 병변 위치 판단 방법 및 이를 위한 내시경 시스템 |
| WO2022231365A1 (ko) * | 2021-04-29 | 2022-11-03 | 자이메드 주식회사 | 내시경 기구 및 이를 이용한 병변 위치 판단 방법 및 시스템 |
| US20230053189A1 (en) * | 2021-08-11 | 2023-02-16 | Terumo Cardiovascular Systems Corporation | Augmented-reality endoscopic vessel harvesting |
| CN114099006B (zh) * | 2021-11-24 | 2023-05-26 | 重庆金山医疗机器人有限公司 | 一种器械与内窥镜距离提示方法 |
| WO2023131878A1 (en) * | 2022-01-05 | 2023-07-13 | Libra Science Ltd. | Automatic guiding for human performance of a medical procedure |
| US20240074725A1 (en) * | 2022-09-01 | 2024-03-07 | Biosense Webster (Israel) Ltd. | Safety alert based on 4d intracardiac echo (ice) catheter tracking |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3589505B2 (ja) * | 1995-06-09 | 2004-11-17 | 株式会社日立メディコ | 3次元画像処理表示装置 |
| US5638819A (en) | 1995-08-29 | 1997-06-17 | Manwaring; Kim H. | Method and apparatus for guiding an instrument to a target |
| AU709081B2 (en) * | 1996-02-15 | 1999-08-19 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| AU1616497A (en) | 1997-02-13 | 1998-09-08 | Super Dimension Ltd. | Six-degree tracking system |
| GB9713018D0 (en) | 1997-06-20 | 1997-08-27 | Secr Defence | Optical fibre bend sensor |
| US6490474B1 (en) * | 1997-08-01 | 2002-12-03 | Cardiac Pathways Corporation | System and method for electrode localization using ultrasound |
| US6671538B1 (en) * | 1999-11-26 | 2003-12-30 | Koninklijke Philips Electronics, N.V. | Interface system for use with imaging devices to facilitate visualization of image-guided interventional procedure planning |
| US20010034530A1 (en) * | 2000-01-27 | 2001-10-25 | Malackowski Donald W. | Surgery system |
| DE10037491A1 (de) | 2000-08-01 | 2002-02-14 | Stryker Leibinger Gmbh & Co Kg | Verfahren zum dreidimensionalen Visualisieren von Strukturen im Körperinneren |
| AU2001292836A1 (en) * | 2000-09-23 | 2002-04-02 | The Board Of Trustees Of The Leland Stanford Junior University | Endoscopic targeting method and system |
| US7599730B2 (en) | 2002-11-19 | 2009-10-06 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| WO2004070577A2 (en) * | 2003-02-04 | 2004-08-19 | Z-Kat, Inc. | Interactive computer-assisted surgery system and method |
| US20060013523A1 (en) | 2004-07-16 | 2006-01-19 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US7781724B2 (en) | 2004-07-16 | 2010-08-24 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US7772541B2 (en) | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20060052689A1 (en) * | 2004-08-14 | 2006-03-09 | Scouten Charles W | Digital stereotaxic manipulator with interfaces for use with computerized brain atlases |
| US7967742B2 (en) | 2005-02-14 | 2011-06-28 | Karl Storz Imaging, Inc. | Method for using variable direction of view endoscopy in conjunction with image guided surgical systems |
| US9492240B2 (en) | 2009-06-16 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US8568299B2 (en) | 2006-05-19 | 2013-10-29 | Intuitive Surgical Operations, Inc. | Methods and apparatus for displaying three-dimensional orientation of a steerable distal tip of an endoscope |
| EP2135575A1 (de) * | 2008-06-16 | 2009-12-23 | BrainLAB AG | Instrumentenausrichtungsverfahren mit freier Referenz |
| US20100076305A1 (en) | 2008-06-25 | 2010-03-25 | Deutsches Krebsforschungszentrum Stiftung Des Offentlichen Rechts | Method, system and computer program product for targeting of a target with an elongate instrument |
| JP2010035831A (ja) * | 2008-08-05 | 2010-02-18 | Hitachi Medical Corp | 医用画像診断装置 |
| US8632468B2 (en) | 2009-02-25 | 2014-01-21 | Koninklijke Philips N.V. | Method, system and devices for transjugular intrahepatic portosystemic shunt (TIPS) procedures |
| US10004387B2 (en) | 2009-03-26 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Method and system for assisting an operator in endoscopic navigation |
| JP5661264B2 (ja) * | 2009-09-03 | 2015-01-28 | 株式会社日立メディコ | X線ナビゲーション装置 |
| US8860757B2 (en) | 2009-12-14 | 2014-10-14 | Smith & Nephew, Inc. | Visualization guided ACL localization system |
| WO2011102012A1 (ja) | 2010-02-22 | 2011-08-25 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US8900131B2 (en) | 2011-05-13 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
| EP3488803B1 (en) * | 2012-02-03 | 2023-09-27 | Intuitive Surgical Operations, Inc. | Steerable flexible needle with embedded shape sensing |
-
2014
- 2014-08-12 US US14/910,601 patent/US11800991B2/en active Active
- 2014-08-12 CN CN201480045422.9A patent/CN105451802B/zh active Active
- 2014-08-12 CN CN201910268867.8A patent/CN109954196B/zh active Active
- 2014-08-12 EP EP14836490.4A patent/EP3033132B1/en active Active
- 2014-08-12 KR KR1020167003490A patent/KR102356881B1/ko active IP Right Grant
- 2014-08-12 JP JP2016534794A patent/JP6785656B2/ja active Active
- 2014-08-12 WO PCT/US2014/050715 patent/WO2015023665A1/en active Application Filing
-
2019
- 2019-06-13 JP JP2019109989A patent/JP6793780B2/ja active Active
-
2023
- 2023-09-26 US US18/475,052 patent/US20240008762A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019162512A (ja) | 2019-09-26 |
| KR20160051738A (ko) | 2016-05-11 |
| EP3033132A1 (en) | 2016-06-22 |
| US11800991B2 (en) | 2023-10-31 |
| CN105451802B (zh) | 2019-04-19 |
| JP2016529999A (ja) | 2016-09-29 |
| EP3033132A4 (en) | 2017-04-26 |
| CN105451802A (zh) | 2016-03-30 |
| WO2015023665A1 (en) | 2015-02-19 |
| CN109954196B (zh) | 2021-11-09 |
| JP6793780B2 (ja) | 2020-12-02 |
| US20160183841A1 (en) | 2016-06-30 |
| US20240008762A1 (en) | 2024-01-11 |
| KR102356881B1 (ko) | 2022-02-03 |
| CN109954196A (zh) | 2019-07-02 |
| EP3033132B1 (en) | 2021-01-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6793780B2 (ja) | カテーテルの位置付け及び挿入のためのグラフィカル・ユーザインターフェイス | |
| US11871898B2 (en) | Systems and methods for interventional procedure planning | |
| US20200107899A1 (en) | Systems and methods for adaptive input mapping | |
| CN109452930B (zh) | 用于使用减小的搜索空间的医疗设备的配准系统和方法 | |
| US20210100627A1 (en) | Systems and methods related to elongate devices | |
| KR20220065894A (ko) | 수술중 세그먼트화를 위한 시스템 및 방법 | |
| WO2016018648A1 (en) | Systems and methods for planning multiple interventional procedures | |
| US20230000354A1 (en) | Systems and methods for medical procedures using optical coherence tomography sensing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160216 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170807 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170807 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180515 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181009 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181213 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190613 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190621 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20190809 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6785656 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |