JP6756166B2 - 力覚センサーユニットおよびロボット - Google Patents
力覚センサーユニットおよびロボット Download PDFInfo
- Publication number
- JP6756166B2 JP6756166B2 JP2016122748A JP2016122748A JP6756166B2 JP 6756166 B2 JP6756166 B2 JP 6756166B2 JP 2016122748 A JP2016122748 A JP 2016122748A JP 2016122748 A JP2016122748 A JP 2016122748A JP 6756166 B2 JP6756166 B2 JP 6756166B2
- Authority
- JP
- Japan
- Prior art keywords
- force sensor
- arm
- robot
- sensor unit
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/16—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring several components of force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
- G01L5/0076—Force sensors associated with manufacturing machines
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40586—6-DOF force sensor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
Description
一端部と、他端部と、前記一端部と前記他端部との間に位置する側部とを有し、前記一端部と前記他端部と前記側部とによって囲まれた空間内に前記力覚センサーを収納している筐体と、
ロボットが有するロボットアームに対して取り付け可能である第1取付部と、前記第1取付部と異なる位置で、前記筐体の前記一端部に対して着脱可能に取り付けられている第2取付部と、を有する取付部材と、
前記力覚センサーに接続され、前記筐体内から前記筐体外に引き出された配線と、を有し、
前記第1取付部には、前記ロボットアームに対する位置決めをする位置決め部が設けられており、
前記配線の一部は、前記側部の周方向に沿わされていることを特徴とする。
このような本発明の力覚センサーユニットによれば、位置決め部を有することで、取付部材をロボットアームに対して精度よく取り付けることができ、よって、筐体をロボットアームに対して精度よく取り付けることができる。また、本発明の力覚センサーユニットによれば、配線の一部が力覚センサーを収納している筐体の側部に沿った状態で配置されているため、配線の変形または変位(特に、一端部と他端部とを結ぶ線分としての中心線X1に沿った方向の変位)により力覚センサーの測定(検出)に与える影響を低減することができる。このようなことから、ロボットアームに対する取り付け方に起因する力覚センサーの精度の低下を低減することができ、また、個体差のばらつきを低減することができる。
前記第1位置決め部材は、前記第1取付部の中心部に設けられており、
前記第2位置決め部材は、前記第1位置決め部材よりも前記第1取付部の外側に設けられていることが好ましい。
これにより、ロボットアームに対する取付部材および筐体の周方向における位置決めを的確に行うことができる。
これにより、筐体と取付部材との位置合わせを容易かつ的確に行うことができ、よって、ロボットアームに対する取付部材を介した筐体の位置決めを容易かつ的確に行うことができる。
これにより、側部に対する配線の位置を規制しつつ、配線の一部を側部に固定することができる。よって、配線の変位によって生じる力覚センサーの測定(検出)に与える影響をより低減することができる。
前記配線の一部は、前記凹部に沿って配置されていることが好ましい。
これにより、筐体の一端部と他端部とを結ぶ線分としての中心線X1に沿った方向における変位を低減でき、配線の変位により力覚センサーの測定(検出)に与える影響をより低減することができる。
これにより、筐体の一端部と他端部とを結ぶ線分としての中心線X1に沿った方向における変位を低減でき、配線の変位により力覚センサーの測定(検出)に与える影響をより低減することができる。
前記第2部位には、前記配線の一部が挿通可能な孔が形成されていることが好ましい。
これにより、第2部位によって配線の一部の位置を規制することができ、配線の変位を低減できる。このため、配線の変位により力覚センサーの測定(検出)に与える影響をより低減することができる。特に、このような構成の第1取付部を有する取付部材は、水平多関節ロボットに適用する場合に有効である。
このような本発明のロボットによれば、本発明の力覚センサーユニットを有しているため、力覚センサーユニットのロボットアームに対する取り付け方に起因する力覚センサーの精度の低下が低減され、また、個体差のばらつきが低減されたロボットを提供することができる。
1.ロボットシステム
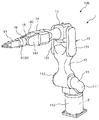
図1は、本発明の第1実施形態に係るロボットを示す斜視図である。図2は、図1に示すロボットおよび制御装置のシステム構成図である。図3は、図1に示すロボットの模式図である。なお、以下では、図1中の下側(基台110側)を「基端側」、その反対側(ロボットアーム10の先端側)を「先端側」と言う。また、図1の上下方向を「鉛直方向」とし、左右方向を「水平方向」とする。
ロボット1は、いわゆる6軸の垂直多関節ロボットであり、対象物の把持、搬送および組立て等の作業を行うことができる。
〈基台〉
図1に示す基台110は、ロボット1が作業する作業領域内の所定の箇所に取り付ける部分であり、ロボットアーム10を支持している。また、本実施形態では、基台110内には、制御装置2が内蔵されている。なお、制御装置2は、ロボット1にその一部または全部が内蔵されていてもよく、また、ロボット1とは、別体で設けられていてもよい。
ロボットアーム10は、第1アーム11(アーム)と、第2アーム12(アーム)と、第3アーム13(アーム)と、第4アーム14(アーム)と、第5アーム15(アーム)と、第6アーム16(アーム)とを有する。第1アーム11は、基台110の上端部に接続されている。第1アーム11と第2アーム12と第3アーム13と第4アーム14と第5アーム15と第6アーム16とは、基端側から先端側に向かってこの順に連結されている。
図1に示す力覚センサーユニット3は、力覚センサー30を有する。力覚センサー30としては、並進3軸方向の力成分と、回転3軸回りのモーメント成分の6成分を同時に検出することができる6軸力覚センサーを用いることができる。そのため、力覚センサーユニット3によれば、ハンド91を介して受ける力やモーメントを検出することができる。なお、力覚センサーユニット3については後に詳述する。
図1に示すハンド91は、力覚センサーユニット3に接続されている角柱状をなす接続部と、接続部の力覚センサーユニット3に接続されている面と反対の面に設けられた2つ(一対)のフィンガーとを有する。このハンド91は、制御装置2の制御によって、フィンガーを開閉することにより対象物の把持およびその開放を行う。
制御装置2は、例えば、CPU(Central Processing Unit)、RAM(Random Access Memory)およびROM(Read Only Memory)等を備えるパーソナルコンピューター(PC)等で構成されている。また、制御装置2は、駆動制御部21と、処理部22と、記憶部23とを有する。駆動制御部21は、例えば、力覚センサー30から入力された検出結果(信号)に基づいて、複数の駆動部120の駆動(例えば、角速度や回転角度等)をそれぞれ独立して制御する機能を有する。処理部22は、各種信号(検出結果を含む)を基に各種演算等を行う機能を有する。記憶部23は、駆動部120の駆動(ロボット1の作動)を制御するプログラムや、各種信号等を記録する機能を有する。
次に、力覚センサーユニットについて詳述する。
[力覚センサー]
前述したように、本実施形態では、力覚センサー30として、外力(モーメントを含む)を検出する機能を有する6軸力覚センサーを用いている。なお、力覚センサー30は、6軸力覚センサーに限らず、3軸力覚センサーであってもよい。また、力覚センサー30は、ひずみゲージ方式、静電容量方式、水晶圧電素子方式等のいかなる方式のものを用いてもよい。
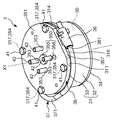
図5〜図7に示す筐体31は、内部空間を有する本体部32と、本体部32に接続された付属部(アタッチメント)33とを有する。
図5に示すように、ハンド側取付部材34は、板状をなし、その平面視形状が筐体31の他端部312の平面視形状に対応している。
図6に示すように、取付部材35は、板状をなし、その平面視形状が筐体31の一端部311の平面視形状に対応している。
図5および図6に示すように、支持部材36は、配線37の一部が挿通される挿通孔361を有する円筒状をなす部材である。この支持部材36の側方の一部は、前述した筐体31の切り欠き部357に固定(接続)されている。これにより、挿通孔361の長手方向が筐体31の周方向に沿うようにして支持部材36が筐体31に取り付けられる。そのため、この支持部材36によれば、配線37の一部が側部313に沿った状態を維持することができる。
配線37は、力覚センサー30に電気的に接続され、筐体31内から貫通孔315を通って筐体31外に引き出され、筐体31の側部313に引き回されている。より具体的には、図5に示すように、配線37の一部が、凹部314に沿って筐体31の側部313に巻かれ、支持部材36の挿通孔361に挿通されている。これにより、この貫通孔315から支持部材36までの間の側部313に巻かれている配線37の一部である巻回部371は、側部313の周方向に沿って配置される。また、配線37の一端部には、コネクター370が設けられている。図4に示すように、コネクター370は、ロボットアーム10が備えるコネクターに接続され、図示しない配線を介して制御装置2に電気的に接続される。これにより、力覚センサー30は、制御装置2に電気的に接続される。
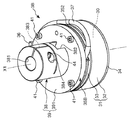
図10は、本発明の第2実施形態に係るロボットを示す斜視図である。図11は、図10に示す力覚センサーユニットをロボットアーム側に設けられた取付部材から見た斜視図である。図12は、図10に示す力覚センサーユニットの側面図である。
図10に示すロボットシステム100Aは、本発明のロボットの一例であるロボット1Aと、ロボット1Aの作動を制御する制御装置2とを有する。
ロボット1Aは、いわゆる6軸の垂直多関節ロボットであり、基台110Aと、ロボットアーム10A(マニピュレーター)と、力覚センサーユニット3Aとを有する。
ロボットアーム10Aは、第1アーム11A(アーム)と、第2アーム12A(アーム)と、第3アーム13A(アーム)と、第4アーム14A(アーム)と、第5アーム15A(アーム)と、第6アーム16A(アーム)とを有する。
図11および図12に示す力覚センサーユニット3Aは、前述した力覚センサーユニット3が有する雄ネジ42よりも小さい雄ネジ42Aを用いていること以外は同様の構成である。このように、用いるロボットの種類等によって、ロボットアーム10Aにネジ留めする雄ネジ42Aの種類を変更してもよい。
図13は、本発明の第3実施形態に係るロボットを示す斜視図である。図14は、図13に示す力覚センサーユニットをロボットアーム側に設けられた取付部材から見た斜視図である。図15は、図13に示す力覚センサーユニットの側面図である。図16は、配線の取り付け方を説明するための図である。図17は、図13に示すロボットが有するスプラインシャフトの先端部を示す図である。
図13に示すロボットシステム100Bは、本発明のロボットの一例であるロボット1Bと、ロボット1Bの作動を制御する制御装置2とを有する。
ロボット1Bは、いわゆる水平多関節ロボット(スカラロボット)である。
ロボットアーム10Bは、第1アーム17と、第2アーム18と、作業ヘッド190に設けられたスプラインシャフト19(アーム)とを有する。
図14および図15に示すように、力覚センサーユニット3Bは、第1取付部39を有する取付部材35Bを備えている。第1取付部39は、第1部位391(上面)と、第1部位391から突出した第2部位38とを有する。
Claims (6)
- 力覚センサーと、
一端部と、他端部と、前記一端部と前記他端部との間に位置し、筒状をなす側部と、を有し、前記一端部と前記他端部と前記側部とによって囲まれた空間内に前記力覚センサーを収納している筐体と、
ロボットが有するロボットアームに対して取り付けられる第1取付面と、前記筐体の前記一端部に対して着脱可能に取り付けられている第2取付面と、を有する取付部材と、
前記第1取付面から突出した凸状をなす第1位置決め部材を有する位置決め部と、
前記力覚センサーに接続されており、前記筐体内から前記筐体外に引き出され、前記側部の周方向に沿って前記筐体に取り付けられている配線と、を有することを特徴とする力覚センサーユニット。 - 前記位置決め部は、前記第1取付面から突出した凸状をなす第2位置決め部材を有し、
前記取付部材の厚さ方向から見た平面視で、前記第1位置決め部材は、前記第1取付部の中心部に設けられており、
前記取付部材の厚さ方向から見た平面視で、前記第2位置決め部材は、前記第1位置決め部材よりも前記第1取付面の外側に設けられている請求項1に記載の力覚センサーユニット。 - 前記筐体および前記取付部材は、切欠き部を有する請求項1または2に記載の力覚センサーユニット。
- 前記配線が挿通している挿通孔を有し、前記側部に設けられ、前記配線を前記側部に対して支持する支持部材を有する請求項1ないし3のいずれか1項に記載の力覚センサーユニット。
- 前記側部には、前記筐体の外部に向かって解放した凹部が形成されており、
前記配線は、前記凹部に沿っている請求項1ないし4のいずれか1項に記載の力覚センサーユニット。 - 請求項1ないし5のいずれか1項に記載の力覚センサーユニットと、当該力覚センサーユニットが取り付けられた前記ロボットアームとを有することを特徴とするロボット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122748A JP6756166B2 (ja) | 2016-06-21 | 2016-06-21 | 力覚センサーユニットおよびロボット |
| US15/627,951 US10209152B2 (en) | 2016-06-21 | 2017-06-20 | Force sensor unit and robot arm including a wire cable routed from inside a casing to outside of the casing |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016122748A JP6756166B2 (ja) | 2016-06-21 | 2016-06-21 | 力覚センサーユニットおよびロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017226031A JP2017226031A (ja) | 2017-12-28 |
| JP2017226031A5 JP2017226031A5 (ja) | 2019-07-11 |
| JP6756166B2 true JP6756166B2 (ja) | 2020-09-16 |
Family
ID=60660123
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016122748A Active JP6756166B2 (ja) | 2016-06-21 | 2016-06-21 | 力覚センサーユニットおよびロボット |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10209152B2 (ja) |
| JP (1) | JP6756166B2 (ja) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7058929B2 (ja) * | 2015-10-27 | 2022-04-25 | キヤノン株式会社 | 駆動装置、ロボット装置、制御方法、物品の製造方法、制御プログラム、および記録媒体 |
| JP6752576B2 (ja) * | 2016-01-13 | 2020-09-09 | キヤノン株式会社 | 駆動機構、ロボット装置、駆動機構の制御方法、ロボット装置の制御方法、物品の製造方法、制御プログラム、記録媒体、及び支持部材 |
| EP3379222B1 (en) | 2017-03-22 | 2020-12-30 | Methode Electronics Malta Ltd. | Magnetoelastic based sensor assembly |
| JP7305298B2 (ja) * | 2017-11-28 | 2023-07-10 | キヤノン株式会社 | 力センサ、力センサの制御方法、ロボットシステム、ロボットシステムの制御方法、ロボットシステムを用いた物品の製造方法、制御プログラム及び記録媒体 |
| US11084342B2 (en) | 2018-02-27 | 2021-08-10 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11014417B2 (en) | 2018-02-27 | 2021-05-25 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| WO2019168565A1 (en) | 2018-02-27 | 2019-09-06 | Methode Electronics,Inc. | Towing systems and methods using magnetic field sensing |
| US11491832B2 (en) | 2018-02-27 | 2022-11-08 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11221262B2 (en) | 2018-02-27 | 2022-01-11 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| US11135882B2 (en) | 2018-02-27 | 2021-10-05 | Methode Electronics, Inc. | Towing systems and methods using magnetic field sensing |
| JP6462946B1 (ja) * | 2018-10-03 | 2019-01-30 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP6488057B1 (ja) * | 2018-12-18 | 2019-03-20 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP6918368B2 (ja) * | 2018-12-18 | 2021-08-11 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP6941402B1 (ja) * | 2019-02-13 | 2021-09-29 | 株式会社トライフォース・マネジメント | 力覚センサ |
| JP2020196059A (ja) * | 2019-05-31 | 2020-12-10 | セイコーエプソン株式会社 | ロボット |
| JP7319105B2 (ja) * | 2019-06-27 | 2023-08-01 | ファナック株式会社 | 回転軸構造およびロボット |
| CN110561473B (zh) * | 2019-09-19 | 2024-04-23 | 佛山职业技术学院 | 一种可防线束滑落的机械手 |
| CA3221375A1 (en) * | 2021-05-25 | 2022-12-01 | Kinova Inc. | Force sensor assembly for articulated mechanism |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6444510A (en) * | 1987-08-13 | 1989-02-16 | Omron Tateisi Electronics Co | Robot control device |
| US4821584A (en) * | 1988-03-15 | 1989-04-18 | The United States Of America As Represented By The United States Department Of Energy | Piezoelectric film load cell robot collision detector |
| US5490427A (en) * | 1994-10-17 | 1996-02-13 | Fanuc Usa Corporation | Six axis force sensor employing multiple shear strain gages |
| DE10223670A1 (de) * | 2002-05-28 | 2003-12-18 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zum Bewegen eines Handhabungssystems |
| DE102008010281B4 (de) * | 2008-02-21 | 2011-07-14 | Otto Bock Healthcare Products Gmbh | Sensoreinrichtung |
| US9895813B2 (en) * | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| JP5489538B2 (ja) * | 2009-06-03 | 2014-05-14 | キヤノン株式会社 | 力覚センサ |
| JP2011200943A (ja) * | 2010-03-24 | 2011-10-13 | Canon Inc | 力制御ロボット |
| JP5875382B2 (ja) * | 2011-02-15 | 2016-03-02 | キヤノン株式会社 | 力覚センサ、ロボット装置、ロボットハンド及び検出装置 |
| DE102012202181A1 (de) * | 2012-02-14 | 2013-08-29 | Kuka Roboter Gmbh | Verfahren zum Ermitteln eines Drehmoments und Industrieroboter |
| JP6168868B2 (ja) * | 2012-06-29 | 2017-07-26 | キヤノン株式会社 | 力覚センサ及び力覚センサを備えたロボットアーム |
| JP6051678B2 (ja) * | 2012-08-22 | 2016-12-27 | セイコーエプソン株式会社 | センサーデバイス、センサーモジュール、力検出装置およびロボット |
| JP6332900B2 (ja) * | 2012-08-31 | 2018-05-30 | セイコーエプソン株式会社 | ロボットシステム及びロボット制御装置 |
| CN105865670B (zh) * | 2015-02-09 | 2020-09-25 | 精工爱普生株式会社 | 力检测装置以及机器人 |
| JP2016161310A (ja) * | 2015-02-27 | 2016-09-05 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| JP6752576B2 (ja) * | 2016-01-13 | 2020-09-09 | キヤノン株式会社 | 駆動機構、ロボット装置、駆動機構の制御方法、ロボット装置の制御方法、物品の製造方法、制御プログラム、記録媒体、及び支持部材 |
-
2016
- 2016-06-21 JP JP2016122748A patent/JP6756166B2/ja active Active
-
2017
- 2017-06-20 US US15/627,951 patent/US10209152B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10209152B2 (en) | 2019-02-19 |
| US20170363490A1 (en) | 2017-12-21 |
| JP2017226031A (ja) | 2017-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6756166B2 (ja) | 力覚センサーユニットおよびロボット | |
| JP6504864B2 (ja) | ロボット制御方法、ロボット装置、プログラム、記録媒体及び物品の製造方法 | |
| CN108463315B (zh) | 驱动机构、机器人臂、机器人系统和制造产品的方法 | |
| US10195744B2 (en) | Control device, robot, and robot system | |
| JP6730352B2 (ja) | ケーブルクランプおよびロボット | |
| US20150266185A1 (en) | Robot and robot system | |
| KR102076907B1 (ko) | 로봇 매니퓰레이터 | |
| KR101801302B1 (ko) | 로봇 핸드 및 이를 이용하는 작업용 로봇 시스템 | |
| JP2007152528A (ja) | 関節装置、関節装置を用いたフィンガーユニット、及び、ユニバーサルロボットハンド | |
| JP7343349B2 (ja) | ロボット、測定用治具、およびツール先端位置の決定方法 | |
| JP2019042853A (ja) | 画像情報処理装置、把持システム、および画像情報処理方法 | |
| US11498218B2 (en) | Robot | |
| JPH03281188A (ja) | 指に回転体を有するロボットの把持装置 | |
| JP7374737B2 (ja) | 検出装置、駆動装置、駆動装置の制御方法、ロボット装置、ロボット装置の制御方法、検出方法、ロボット装置を用いた物品の製造方法、プログラム及び記録媒体 | |
| US11400583B2 (en) | Robot | |
| US11458616B2 (en) | Robot | |
| JP7154748B2 (ja) | ロボットシステム、物品の製造方法、制御方法、制御プログラム、及び記録媒体 | |
| JP2617489B2 (ja) | 関節センサー | |
| KR102033908B1 (ko) | 역감제시장치 | |
| CN112643683B (zh) | 示教方法 | |
| JP2020179483A (ja) | ロボット | |
| US20180200892A1 (en) | Robot | |
| JP2002283268A (ja) | スライド式チャックおよびスライド式チャックの制御方法ならびにスライド式チャックの制御ソウフトウェアの記録媒体 | |
| US20230347530A1 (en) | Robot hand | |
| JP2023061648A (ja) | ロボットシステム、ロボットシステムの制御方法、ロボットシステムを用いた物品の製造方法、遮蔽板、制御プログラムおよび記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190610 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190610 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200728 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200722 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200810 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6756166 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |