JP6719084B2 - 回転打撃工具 - Google Patents
回転打撃工具 Download PDFInfo
- Publication number
- JP6719084B2 JP6719084B2 JP2016188779A JP2016188779A JP6719084B2 JP 6719084 B2 JP6719084 B2 JP 6719084B2 JP 2016188779 A JP2016188779 A JP 2016188779A JP 2016188779 A JP2016188779 A JP 2016188779A JP 6719084 B2 JP6719084 B2 JP 6719084B2
- Authority
- JP
- Japan
- Prior art keywords
- hammer
- spindle
- guide groove
- rotation axis
- main
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
- B25B21/02—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose with means for imparting impact to screwdriver blade or nut socket
- B25B21/026—Impact clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B21/00—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose
- B25B21/02—Portable power-driven screw or nut setting or loosening tools; Attachments for drilling apparatus serving the same purpose with means for imparting impact to screwdriver blade or nut socket
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D16/00—Portable percussive machines with superimposed rotation, the rotational movement of the output shaft of a motor being modified to generate axial impacts on the tool bit
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
Description
本発明者らは、特許文献1に開示されるダブルハンマ構成に変更を加えることで、工具本体に伝達される回転軸線方向の振動を低減させる技術を想到するに至った。
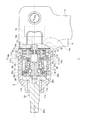
ユーザによる操作スイッチ4の引き操作により駆動部10が回転駆動すると、動力伝達機構12を介してキャリア16およびスピンドル11が回転する。スピンドル11の回転力は、スピンドル11の第1案内溝11bと主ハンマ20の第1係合溝20bの間に嵌め込まれた鋼球19を介して主ハンマ20に伝達され、主ハンマ20および副ハンマ21が一体となって回転する。
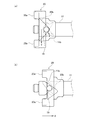
図8(b)は、回転打撃機構のC−C断面図を示す。図8(b)では、ばね部材23や遊星歯車14などの図示を省略している。この状態で3つの鋼球17がそれぞれ第2案内溝16aの最後部に位置している。
図8(c)は、回転打撃機構のD−D断面図を示す。第2案内溝16aは、鋼球17が配置されている最後部から、前方に傾斜する2つの傾斜溝を有している。
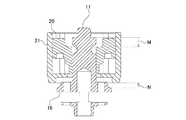
本発明のある態様の回転打撃工具(1)は、駆動部(10)と、駆動部により回転されるスピンドル(11)と、スピンドルの回転軸線を中心に回転可能且つ回転軸線方向に移動可能な主ハンマ(20)と、スピンドル側の第1案内溝(11b)と主ハンマ側の第1係合溝(20b)との間に第1鋼球(19)を配置した第1カム構造と、主ハンマにより回転打撃力が加えられるアンビル(22)と、主ハンマと一体に回転可能な副ハンマ(21)と、第1案内溝の後方側に設けられて第1案内溝が形成されたスピンドルの部分より大きい外径を有する大径部(16)と、大径部側の第2案内溝(16a)と副ハンマ側の第2係合溝(21f)との間に第2鋼球(17)を配置した第2カム構造とを備える。この態様の回転打撃工具は、主ハンマが回転軸線方向に移動すると、副ハンマが主ハンマの移動方向とは逆方向に移動するように構成される。
Claims (8)
- 駆動部と、前記駆動部により回転されるスピンドルと、前記スピンドルの回転軸線を中心に回転可能且つ回転軸線方向に移動可能な主ハンマと、前記スピンドル側の第1案内溝と前記主ハンマ側の第1係合溝との間に第1鋼球を配置した第1カム構造と、前記主ハンマにより回転打撃力が加えられるアンビルと、前記主ハンマと一体に回転可能な副ハンマと、前記第1案内溝の後方側に設けられて前記第1案内溝が形成された前記スピンドルの部分より大きい外径を有する大径部と、前記大径部側の第2案内溝と前記副ハンマ側の第2係合溝との間に第2鋼球を配置した第2カム構造と、を備え、
前記主ハンマが回転軸線方向に移動すると、前記副ハンマが前記主ハンマの移動方向とは逆方向に移動するように構成されたことを特徴とする回転打撃工具。 - 前記大径部は、前記スピンドルの後端側に位置して動力伝達用の歯車を収容するキャリアである、
ことを特徴とする請求項1に記載の回転打撃工具。 - 前記スピンドルは、前記第1案内溝が形成された小径部と、前記第2案内溝が形成された前記大径部とを有する、
ことを特徴とする請求項1に記載の回転打撃工具。 - 前記主ハンマの質量よりも前記副ハンマの質量が大きい、
ことを特徴とする請求項1から3のいずれかに記載の回転打撃工具。 - 前記第2案内溝における前記第2鋼球の回転軸線方向の可動域は、前記第1案内溝における前記第1鋼球の回転軸線方向の可動域よりも小さい、
ことを特徴とする請求項1から4のいずれかに記載の回転打撃工具。 - 前記第2鋼球の回転軸線方向の可動域と前記第1鋼球の回転軸線方向の可動域との比は、前記主ハンマの質量と前記副ハンマの質量との比に実質的に等しく設定される、
ことを特徴とする請求項5に記載の回転打撃工具。 - 前記副ハンマは、前記主ハンマを収容する、
ことを特徴とする請求項1から6のいずれかに記載の回転打撃工具。 - 前記第1鋼球および前記第2鋼球は、同じ大きさを有する、
ことを特徴とする請求項1から7のいずれかに記載の回転打撃工具。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016188779A JP6719084B2 (ja) | 2016-09-27 | 2016-09-27 | 回転打撃工具 |
| PCT/JP2017/024810 WO2018061387A1 (ja) | 2016-09-27 | 2017-07-06 | 回転打撃工具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016188779A JP6719084B2 (ja) | 2016-09-27 | 2016-09-27 | 回転打撃工具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018051659A JP2018051659A (ja) | 2018-04-05 |
| JP6719084B2 true JP6719084B2 (ja) | 2020-07-08 |
Family
ID=61760457
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016188779A Active JP6719084B2 (ja) | 2016-09-27 | 2016-09-27 | 回転打撃工具 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6719084B2 (ja) |
| WO (1) | WO2018061387A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12415259B2 (en) | 2023-08-02 | 2025-09-16 | Black & Decker Inc. | Impact power tool and impact mechanism |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06190741A (ja) * | 1992-10-27 | 1994-07-12 | Matsushita Electric Works Ltd | インパクトレンチ |
| JP4457170B1 (ja) * | 2009-06-03 | 2010-04-28 | 株式会社空研 | インパクトレンチ |
| JP6027946B2 (ja) * | 2013-06-12 | 2016-11-16 | パナソニック株式会社 | インパクトレンチ |
| JP2016055401A (ja) * | 2014-09-12 | 2016-04-21 | パナソニックIpマネジメント株式会社 | インパクト回転工具 |
| JP6397325B2 (ja) * | 2014-12-22 | 2018-09-26 | 株式会社Tjmデザイン | 回転工具 |
-
2016
- 2016-09-27 JP JP2016188779A patent/JP6719084B2/ja active Active
-
2017
- 2017-07-06 WO PCT/JP2017/024810 patent/WO2018061387A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018051659A (ja) | 2018-04-05 |
| WO2018061387A1 (ja) | 2018-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6832509B2 (ja) | 回転打撃工具 | |
| US10668602B2 (en) | Impact rotary tool | |
| JP6027946B2 (ja) | インパクトレンチ | |
| JP6341283B2 (ja) | 打撃工具 | |
| JP5583500B2 (ja) | 打撃工具 | |
| EP2439021B1 (en) | Impact wrench | |
| US7048075B2 (en) | Power tool | |
| US20150158155A1 (en) | Rotary impact tool | |
| JP6607502B2 (ja) | インパクト回転工具 | |
| JP6719084B2 (ja) | 回転打撃工具 | |
| WO2018061389A1 (ja) | 回転打撃工具 | |
| JP2009172732A (ja) | インパクト回転工具 | |
| WO2018142742A1 (ja) | 回転打撃工具 | |
| WO2018061388A1 (ja) | 回転打撃工具 | |
| JP2014151421A (ja) | インパクト工具 | |
| JP2013022691A (ja) | インパクト回転工具 | |
| JP2018051712A (ja) | 電動工具 | |
| JP2010036282A (ja) | 電動工具 | |
| JP2024142590A (ja) | インパクト工具 | |
| JP2018051713A (ja) | 電動工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180416 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200428 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200528 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6719084 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |