以下、添付図面を参照しながら本実施形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
第1実施形態に係る制御モジュール100は、車両50に設けられる熱交換ユニット10の制御を行うための装置として構成されている。制御モジュール100の説明に先立ち、先ず熱交換ユニット10の構成について説明する。図1及び図2に示されるように、熱交換ユニット10は複数の熱交換器(室外用熱交換器740とラジエータ31)や装置(シャッタ装置20等)を組み合わせてユニット化したものである。熱交換ユニット10は、車両50のエンジンルームER内に設置されている。尚、熱交換ユニット10は、本実施形態のように複数の熱交換器を備える構成であってもよいが、熱交換器を1つだけ備える構成であってもよい。
室外用熱交換器740は、後に説明する車両用空調装置70(図3を参照)の一部を成すものである。室外用熱交換器740は、フロントグリルGRの開口OPからエンジンルームER内に導入された空気と、車両用空調装置70を循環する空調用の冷媒との間での熱交換を行うための熱交換器として構成されている。
ラジエータ31は、内燃機関であるエンジン51を通って循環する冷却水を、空気との熱交換によって冷却するための熱交換器である。ラジエータ31は、室外用熱交換器740の後方側となる位置に配置されている。このため、フロントグリルGRの開口OPからエンジンルームER内に導入された空気は、上記のように室外用熱交換器740を通って冷媒との熱交換に供された後、ラジエータ31を通って冷却水との熱交換に供される。
熱交換ユニット10は、上記のラジエータ31及び室外用熱交換器740に加えて、シャッタ装置20と、電動ファン40と、シュラウド43と、電動膨張弁730と、温水弁32と、を備えている。
シャッタ装置20は、開口OPからエンジンルームER内に導入される空気の流量を調整し、これにより室外用熱交換器740等を通過する空気の流量を調整するための装置である。このようなシャッタ装置20は、所謂「グリルシャッタ」と称されるものである。
シャッタ装置20は、シャッタブレード21と、シャッタアクチュエータ22とを有している。シャッタブレード21は、室外用熱交換器740よりも前方側となる位置において、複数並ぶように配置されている。シャッタブレード21が回転してその開度(以下では、当該開度のことを「シャッタ装置20の開度」とも表記する)が変化すると、シャッタ装置20を通過する空気の流量が変化し、室外用熱交換器740及びラジエータ31のそれぞれを通る空気の流量が変化する。
シャッタアクチュエータ22は、シャッタブレード21を回転させ、その開度を調整するための電動の駆動装置である。シャッタアクチュエータ22は、シャッタブレード21の近傍に設けられている。シャッタアクチュエータ22の動作は後述の制御モジュール100によって制御される。
このように、シャッタ装置20は、その開度を変化させることによって通過する空気の流量を調整し、フロントグリルGRから流入し室外用熱交換器740及びラジエータ31を通過する空気の流量を調整するための装置として構成されている。このようなシャッタ装置20は、本実施形態における「空気制御装置」に該当するものである。
電動ファン40は、室外用熱交換器740及びラジエータ31を通過する空気の流れを作り出すための電動のファンである。電動ファン40は、ラジエータ31よりも後方側となる位置に配置されている。電動ファン40は、空気の流れを作り出すための回転翼41と、回転翼41を回転させるための回転電機であるファンモータ42とによって構成されている。ファンモータ42の回転数が変化すると、フロントグリルGRから流入し室外用熱交換器740及びラジエータ31を通る空気の流量が変化する。このような電動ファン40は、先に説明したシャッタ装置20と共に、「空気制御装置」に該当するものである。
電動ファン40は、単位時間あたりにおける回転翼41の回転数を測定するためのセンサ(不図示)を備えている。当該センサで測定された回転数は、制御モジュール100に送信される。
シュラウド43は、電動ファン40の周囲を後方側から覆うように設けられた部材である。電動ファン40によって引き込まれる空気は、シュラウド43によって室外用熱交換器740及びラジエータ31に効率よく導かれる。
電動膨張弁730は、室外用熱交換器740と共に、車両用空調装置70の一部を成す装置である。後に説明するように、電動膨張弁730は、冷凍サイクルにおいて冷媒の圧力を低下させる膨張弁として機能するものである。電動膨張弁730の開度は制御モジュール100によって制御される。電動膨張弁730によって、室外用熱交換器740を通る経路で循環する冷媒の流れが調整される。このような電動膨張弁730は、本実施形態における「冷媒制御装置」に該当するものである。
温水弁32は、ラジエータ31とエンジン51との間で冷却水が循環する流路(不図示)の途中に設けられた電動の開閉弁である。本実施形態では、温水弁32はラジエータ31と隣接する位置に設けられている。温水弁32が閉状態になると、ラジエータ31に対する冷却水の供給が停止される。温水弁32の動作は制御モジュール100によって制御される。
車両用空調装置70の構成について、図3を参照しながら説明する。車両用空調装置70は、冷媒が循環する冷凍サイクルとして構成されている。車両用空調装置70は、冷媒流路710と、コンプレッサ720と、電動膨張弁750と、室内用熱交換器760と、電動膨張弁730と、室外用熱交換器740と、を備えている。図3に示されるように、車両用空調装置70はその一部(室外用熱交換器740等)が車両50のエンジンルームER内に配置されており、他部(室内用熱交換器760等)が車両50の車室IR内に配置されている。
冷媒流路710は、冷媒を循環させるために環状に配置された配管である。これから説明するコンプレッサ720等は、いずれもこの冷媒流路710に沿って配置されている。
コンプレッサ720は、冷媒を圧送し冷媒流路710において循環させるための装置である。コンプレッサ720が駆動されているときには、コンプレッサ720において圧縮され高温高圧となった冷媒が電動膨張弁750側に向けて送り出される。
電動膨張弁750は、冷媒流路710のうちコンプレッサ720よりも下流側となる位置に設けられている。電動膨張弁750は、当該位置において冷媒流路710の流路断面積を絞ることにより、通過する冷媒の圧力を低下させるものである。電動膨張弁750は不図示の電動アクチュエータによって不図示の弁体を動作させ、その開度を変化させる。
冷媒流路710のうち電動膨張弁750の近傍となる位置には、電動膨張弁750を迂回するように冷媒を流すためのバイパス流路751が設けられている。バイパス流路751の途中には電磁開閉弁752が設けられている。電磁開閉弁752が閉状態のときには、冷媒は電動膨張弁750を通る経路で冷媒流路710を循環する。電磁開閉弁752が開状態のときには、冷媒は電動膨張弁750を殆ど通らず、バイパス流路751を通る経路で冷媒流路710を循環する。
室内用熱交換器760は、冷媒流路710のうち電動膨張弁750よりも下流側となる位置に設けられている。室内用熱交換器760は、車室IRに吹き出される空気と、冷媒流路710を循環する冷媒との間で熱交換を行うための熱交換器である。車両用空調装置70は、室内用熱交換器760において空気を加熱又は冷却することにより車室IR内の空調を行う。
電動膨張弁730は、既に述べたように熱交換ユニット10の一部を成すものであって、冷媒流路710のうち室内用熱交換器760よりも下流側となる位置に設けられている。電動膨張弁730は、当該位置において冷媒流路710の流路断面積を絞ることにより、通過する冷媒の圧力を低下させるものである。電動膨張弁730は電動アクチュエータ730M(図3では不図示、図4を参照)によって不図示の弁体を動作させ、その開度を変化させる。
冷媒流路710のうち電動膨張弁730の近傍となる位置には、電動膨張弁730を迂回するように冷媒を流すためのバイパス流路731が設けられている。バイパス流路731の途中には電磁開閉弁732が設けられている。電磁開閉弁732が閉状態のときには、冷媒は電動膨張弁730を通る経路で冷媒流路710を循環する。電磁開閉弁732が開状態のときには、冷媒は電動膨張弁730を殆ど通らず、バイパス流路731を通る経路で冷媒流路710を循環する。
室外用熱交換器740は、既に述べたように熱交換ユニット10の一部を成すものである。室外用熱交換器740は、冷媒流路710のうち電動膨張弁730よりも下流側となる位置であり、コンプレッサ720よりも上流側となる位置に設けられている。室外用熱交換器740の具体的な構成については後に説明する。
冷媒流路710のうち室外用熱交換器740よりも下流側の部分、具体的には、室外用熱交換器740から排出された直後の冷媒が通る部分には、圧力センサ61と温度センサ62とが設けられている。圧力センサ61は、室外用熱交換器740から排出される冷媒の圧力を測定するためのセンサである。圧力センサ61で測定された冷媒の圧力は、制御モジュール100へと送信される。温度センサ62は、室外用熱交換器740から排出される冷媒の温度を測定するためのセンサである。温度センサ62で測定された冷媒の温度は、制御モジュール100へと送信される。
室外用熱交換器740の近傍には、室外用熱交換器740を通過する空気の風速を測定する風速センサ63が設けられている。風速センサ63で測定された風速は、制御モジュール100へと送信される。
車両用空調装置70によって車室IR内の暖房が行われる際には、電磁開閉弁732が閉状態に切り換えられ、電磁開閉弁752が開状態に切り換えられる。冷媒は、電動膨張弁730を通る経路で冷媒流路710を循環し、電動膨張弁730を通る際においてその温度及び圧力を低下させる。つまり、車室IR内の暖房が行われる際には、電動膨張弁730は冷凍サイクルの「膨張弁」として機能する。
室外用熱交換器740には、電動膨張弁730を通過した低温低圧の冷媒が供給される。室外用熱交換器740では、低温の冷媒によって空気からの吸熱が行われ、これにより内部で冷媒が蒸発する。つまり、車室IR内の暖房が行われる際には、室外用熱交換器740は冷凍サイクルの「蒸発器」として機能する。
室外用熱交換器740を通過した冷媒は、コンプレッサ720において圧縮され、その温度及び圧力を上昇させた状態で下流側に送り出される。高温高圧となった冷媒は、バイパス流路751を経て室内用熱交換器760に供給される。
室内用熱交換器760では、冷媒から空気への放熱が行われ、これにより内部で冷媒が凝縮する。つまり、車室IR内の暖房が行われる際には、室内用熱交換器760は冷凍サイクルの「凝縮器」として機能する。空気は、室内用熱交換器760における熱交換によってその温度を上昇させた後、空調風として車室IR内に吹き出される。
室内用熱交換器760を通過した冷媒は、冷媒流路710を通って再び電動膨張弁730に到達する。図3では、車室IR内の暖房が行われる際において上記のように冷媒が循環する経路が、複数の矢印で示されている。
車両用空調装置70によって車室IR内の冷房が行われる際には、電磁開閉弁732が開状態に切り換えられ、電磁開閉弁752が閉状態に切り換えられる。当該状態においては、冷媒流路710を循環する冷媒は電動膨張弁730をバイパスして流れる一方で、電動膨張弁750を通るようになる。冷媒は、電動膨張弁750を通る際においてその温度及び圧力を低下させる。つまり、車室IR内の冷房が行われる際には、電動膨張弁750が冷凍サイクルの「膨張弁」として機能する。
室内用熱交換器760には、電動膨張弁730を通過した低温低圧の冷媒が供給される。室内用熱交換器760では、低温の冷媒によって空気からの吸熱が行われ、これにより内部で冷媒が蒸発する。つまり、車室IR内の冷房が行われる際には、室内用熱交換器760が冷凍サイクルの「蒸発器」として機能する。
また、室外用熱交換器740では、冷媒から空気への放熱が行われわれ、これにより内部で冷媒が凝縮する。つまり、車室IR内の暖房が行われる際には、室外用熱交換器740は冷凍サイクルの「凝縮器」として機能する。このとき、コンプレッサ720よる冷媒の圧縮が、室外用熱交換器740の下流側ではなく上流側において行われるように、冷媒の流れる経路が不図示の配管や切換え弁等によって予め変更されるような構成としてもよい。
室外用熱交換器740の具体的な構成について、図4を参照しながら説明する。室外用熱交換器740は、一対のタンク741、742と、これらの間に配置されたコア部743とを備えている。タンク741、742は、いずれも上下方向に伸びるように形成された細長い形状の容器である。タンク741、742には、冷媒流路710を循環する冷媒が一時的に貯えられる。
コア部743は、室外用熱交換器740において冷媒と空気との熱交換が行われる部分である。コア部743には、複数のチューブ及びフィン(いずれも不図示)が配置されている。チューブは、例えば断面が扁平形状の管であって、その内部には冷媒が通る流路が形成されている。複数のチューブは、いずれもタンク741とタンク742との間を繋いでおり、互いの主面を対向させた状態で上下に積層されている。
フィンは、金属板を波状に折り曲げることにより形成されたものであって、積層されたそれぞれのチューブの間に配置されている。波状であるフィンのそれぞれの頂部は、チューブの外表面に対して当接しており、且つろう接されている。このため、暖房時において室外用熱交換器740を通過する空気の熱は、チューブを介して冷媒に伝達されるだけでなく、フィン及びチューブを介しても冷媒に伝達される。つまり、フィンによって空気との接触面積が大きくなっており、冷媒と空気との熱交換が効率よく行われる。尚、上記のようなフィン及びチューブを有するコア部743の構成としては公知のものを採用し得るので、その詳細な図示及び説明については省略する。
タンク741及びタンク742の内部空間は、不図示のセパレータによって上下に分かれるように仕切られている。室外用熱交換器740を通る冷媒は、タンク741とタンク742との間を複数回行き来しながら、コア部743における熱交換に供される。
タンク741の側方(コア部743とは反対側)には、モジュレータタンク770が設けられている。モジュレータタンク770は、上下方向に伸びるように形成された細長い形状の容器であって、タンク741と平行に並ぶように配置されている。
モジュレータタンク770とタンク741との間は、接続配管771、772、773によって接続されている。室外用熱交換器740を通る冷媒は、接続配管771、772、773からモジュレータタンク770を経由しながら、上記のようにタンク741とタンク742との間を複数回行き来する。モジュレータタンク770には液相の冷媒が貯えられている。気液混合の状態で流れている冷媒は、モジュレータタンク770を通過する際において気液が分離された状態となる。
本実施形態では、電動膨張弁730の電動アクチュエータ730Mが、モジュレータタンク770の上端に取り付けられている。これにより、電動膨張弁730とモジュレータタンク770とが一体となっている。電動膨張弁730のうち流路断面積を絞るための弁体(不図示)は、電動アクチュエータ730Mの直下となる位置に設けられており、モジュレータタンク770の内部に配置されている。
電動アクチュエータ730Mには、電動アクチュエータ730Mを動作させるための回路基板BD1が設けられている。回路基板BD1には、電動アクチュエータ730Mを動作させるために必要な構成部品の他、制御モジュール100の構成部品も配置されている。つまり、本実施形態に係る制御モジュール100は、冷媒制御装置である電動膨張弁730と一体に構成されている。
図5を参照しながら、制御モジュール100を含む熱交換ユニット10、及びその周囲の構成について説明する。既に述べたように、熱交換ユニット10はその全体が車両50のエンジンルームER内に配置されている。
エンジンルームER内には、熱交換ユニット10における3流体(冷媒、冷却水、空気)の流れを制御するために必要な複数のセンサが配置されている。このようなセンサとしては、既に説明した圧力センサ61や温度センサ62の他に、例えばシャッタ装置20の開度を測定する開度センサ等が挙げられる。それぞれのセンサで測定された値は、電気信号(検知信号)として制御モジュール100に入力される。図5においては、これら複数のセンサが、符号60が付された単一のブロックとして描かれている。以下では、これら複数のセンサのことを総じて「センサ60」とも表記する。
車両50の車室IRには、エンジンECU200と空調ECU300とが配置されている。これらはいずれも、CPU、ROM、RAM、通信インタフェース等を有するコンピュータシステムとして構成されている。
エンジンECU200は、エンジン51の制御を行うための制御装置である。エンジンECU200は、エンジン51とラジエータ31との間で循環する冷却水の流量の調整や、温水弁32の動作制御、シャッタ装置20の開度の調整、及び電動ファン40の回転数の調整等を行う。尚、エンジンECU200によって行われる制御のうち一部の制御(例えばシャッタアクチュエータ22の動作制御)は、制御モジュール100を介して行われる。
エンジンECU200と制御モジュール100との間では、LIN等のネットワークを介した通信が行われる。制御モジュール100は、エンジンECU200から送信される制御信号を受信し、当該制御信号に基づいて各種機器(シャッタアクチュエータ22等)の動作制御を行う。ただし、制御モジュール100は、常に制御信号の通りに各種機器の動作制御を行うのではなく、自らの判断で各種機器の動作制御を行うこともある。
空調ECU300は、車両用空調装置70の制御を行うための制御装置である。空調ECU300は、車両用空調装置70を構成する各種の機器(電動膨張弁730等)のそれぞれの動作を制御することにより、車室IR内の空調を適切に行う。尚、空調ECU300によって行われる制御のうち一部の制御(例えば電動膨張弁730の動作制御)は、制御モジュール100を介して行われる。
空調ECU300と制御モジュール100との間では、LIN等のネットワークを介した通信が行われる。制御モジュール100は、空調ECU300から送信される制御信号を受信し、当該制御信号に基づいて各種機器(電動膨張弁730等)の動作制御を行う。ただし、制御モジュール100は、常に制御信号の通りに各種機器の動作制御を行うのではなく、自らの判断で各種機器の動作制御を行うこともある。
車両50には、各種機器に電力を供給するための電源系統が複数設けられている。図5に示されるように、制御モジュール100には電源系統PL1からの電力が供給されており、エンジンECU200には電源系統PL2からの電力が供給されており、空調ECU300には電源系統PL3からの電力が供給されている。
電源系統PL1は、車両50に設けられたバッテリ(不図示)からの電力が直接供給される電源系統である。このため、車両50のイグニッションスイッチ(不図示)がオンであるかオフであるかに拘らず、制御モジュール100には電源系統PL1からの電力が常に供給されている。
電源系統PL2は、車両50に設けられたオルタネータ(不図示)からの電力が供給される電源系統である。このため、車両50のイグニッションスイッチがオンとされ、エンジン51が動作しているときには、エンジンECU200には電源系統PL2からの電力が供給される。一方、車両50のイグニッションスイッチがオフとされ、エンジン51が停止しているときには、エンジンECU200には電源系統PL2からの電力が供給されない。
電源系統PL3は、電源系統PL1と同様に、車両50に設けられたバッテリからの電力が直接供給される電源系統である。このため、車両50のイグニッションスイッチがオンであるかオフであるかに拘らず、空調ECU300には電源系統PL3からの電力が常に供給されている。
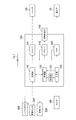
図6を参照しながら、制御モジュール100の構成について説明する。制御モジュール100は、受信部110と、入力部120と、取得部125と、制御部130と、ドライバ141、142と、HUB143とを備えている。
受信部110は、エンジンECU200及び空調ECU300のそれぞれから、各種機器の動作を制御するための制御信号を受信する部分である。当該制御信号は、これまでに説明したシャッタ装置20や電動膨張弁730等の動作を制御するための信号である。尚、本実施形態では、エンジンECU200及び空調ECU300からなる2つのECUから制御信号が送信され、当該制御信号が受信部110によって受信される。このような態様に替えて、単一のECUからの制御信号が、受信部110によって受信されるような態様であってもよい。
本実施形態では、シャッタ装置20の動作を制御するための制御信号、及び温水弁32の動作を制御するための制御信号が、エンジンECU200から送信され受信部110によって受信される。また、電動膨張弁730の動作を制御するための制御信号が空調ECU300から送信され、受信部110によって受信される。つまり、複数の装置の動作を制御するための制御信号が受信部110によって受信される。このような態様に替えて、受信部によって受信される制御信号は単一の装置の動作を制御するためのものであってもよい。
入力部120は、センサ60からのそれぞれの検知信号が入力される部分である。センサ60からの検知信号は、他のECU(電子制御ユニット)を介することなく、センサ60に含まれるそれぞれのセンサから制御モジュール100に対して直接入力される。他のECUを介した通信によるタイムラグが生じないので、制御モジュール100は、各種センサにおける測定値を瞬時に把握することができる。
尚、制御モジュール100は、車両50に設けられた車速センサ201から、車速(車両50の走行速度)を示す検知信号を受信することも可能となっている。ただし、車速センサ201から送信される検知信号は、入力部120に直接入力されるのではなく、エンジンECU200を介して制御モジュール100に入力される。つまり、制御モジュール100は、エンジンECU200との通信によって車両50の走行速度を取得することが可能となっている。このような態様に替えて、車速センサ201からの検知信号が入力部120に直接入力されるような態様であってもよい。
取得部125は、室外用熱交換器740から排出される冷媒の過熱度を取得する部分である。取得部125は、圧力センサ61で測定される冷媒の圧力、及び温度センサ62で測定される冷媒の温度を取得し、これらに基づいて、室外用熱交換器740から排出された直後の冷媒の過熱度を取得する。「過熱度」とは、室外用熱交換器740から排出された冷媒(過熱蒸気)の温度と、当該冷媒と同じ圧力における冷媒の飽和温度との温度差のことであり、所謂「スーパーヒート」とも称されるものである。取得部125で取得された上記の過熱度は制御部130に入力される。
制御モジュール100が備える記憶装置(不図示)には、冷媒の圧力及び温度と過熱度との関係が、予めマップとして記憶されている。取得部125は、圧力センサ61及び温度センサ62のそれぞれの測定値と上記マップとを参照することにより、冷媒の過熱度を算出し取得する。
制御部130は、後述のドライバ141等を介して、シャッタ装置20や電動膨張弁730等、熱交換ユニット10が備える各種機器の動作を制御する部分である。エンジンECU200や空調ECU300から受信された制御信号は、受信部110から制御部130へと入力される。また、センサ60から入力された各種の検知信号は、入力部120から制御部130へと入力される。制御部130は、入力された制御信号及び検知信号に基づいて、シャッタ装置20等の動作を制御する。
ドライバ141は、シャッタ装置20に駆動用電流を供給するための部分である。ドライバ141には、動作用の電力として電源系統PL1からの電力が供給されている。ドライバ141には、シャッタアクチュエータ22に駆動用電流を供給するための回路が形成されている。ドライバ141からシャッタアクチュエータ22への駆動用電流の供給は、制御部130からの信号によって制御される。これにより、シャッタアクチュエータ22の動作が制御され、シャッタ装置20の開度が所定の開度となるように調整される。
ドライバ142は、電動膨張弁730の電動アクチュエータ730Mに駆動用電流を供給するための部分である。ドライバ142には、動作用の電力として電源系統PL1からの電力が供給されている。ドライバ142には、電動アクチュエータ730Mに供給される駆動用電流の大きさを調整するための回路が形成されている。電動アクチュエータ730Mに供給される駆動用電流の大きさは、制御部130からの信号によって調整される。電動アクチュエータ730Mに供給される駆動用電流が大きくなると、電動膨張弁730の開度が大きくなる。電動アクチュエータ730Mに供給される駆動用電流が小さくなると、電動膨張弁730の開度が小さくなる。
HUB143は所謂集線装置である。HUB143には、熱交換ユニット10が備える各種機器の一部に繋がる信号線が接続される。本実施形態では、温水弁32に繋がる信号線がHUB143に接続されている。また、HUB143には、動作用の電力として電源系統PL1からの電力が供給されている。
制御部130は、温水弁32に対して(駆動用の電流ではなく)制御用の信号のみを送信することにより、温水弁32の動作を制御するように構成されている。温水弁32には、その動作を制御するためのドライバ(不図示)が内蔵されている。当該ドライバは、制御部130からHUB143を介して送信される制御用の信号に基づいて動作し、温水弁32の開閉を切り換える。温水弁32が開状態となると、ラジエータ31に対する冷却水の供給が開始される。温水弁32が閉状態となると、ラジエータ31に対する冷却水の供給が停止される。
HUB143に繋がる機器の数は、本実施形態のように1つであってもよく、2つ以上であってもよい。また、HUB143が設けられておらず、熱交換ユニット10が備える各種機器の全てが、本実施形態におけるシャッタ装置20のように、ドライバを介して制御部130に接続されているような態様であってもよい。制御部130と各種機器との間における通信のタイムラグが問題となるような場合には、このような構成の方が好ましい。
上記とは逆に、熱交換ユニット10が備える各種機器の全てが、本実施形態における温水弁32のように、HUB143を介して制御部130に接続されているような態様であってもよい。制御モジュール100や熱交換ユニット10の拡張性に鑑みれば、このような構成の方が好ましい。
ところで、車両用空調装置70の暖房運転中においては、蒸発器である室外用熱交換器740から排出される冷媒の過熱度が小さくなり過ぎてしまうと、下流側にあるコンプレッサ720に液相の冷媒が到達してしまい、コンプレッサ720の動作が妨げられてしまう可能性がある。一方、上記過熱度が大きくなり過ぎてしまうと、電動膨張弁730を通過する冷媒の流路抵抗が大きくなり、冷凍サイクルの動作効率が低下してしまうこととなる。そこで、車両用空調装置70の暖房運転中においては、室外用熱交換器740の出口部分における冷媒の過熱度(つまり、取得部125で取得される過熱度)を所定の目標値に一致させる制御を行う必要がある。以下では、当該制御のことを「過熱度調整制御」とも称する。
過熱度調整制御においては、制御モジュール100は、上位のECU(エンジンECU200や空調ECU300)から送信される制御信号に示される態様とは異なる態様で、シャッタ装置20や電動膨張弁730の動作を制御する。本実施形態における過熱度調整制御の具体的な態様について、図7を参照しながら説明する。
図7に示される一連の処理は、所定の制御周期が経過する毎に、制御モジュール100によって繰り返し実行される処理である。
最初のステップS01では、温度センサ62で測定された温度、すなわち、室外用熱交換器740から排出される冷媒の温度が取得される。ステップS01に続くステップS02では、圧力センサ61で測定された圧力、すなわち、室外用熱交換器740から排出される冷媒の圧力が取得される。
ステップS02に続くステップS03では、ステップS01で取得された冷媒の温度、及びステップS02で取得された冷媒の圧力に基づいて、冷媒の過熱度が取得(算出)される。当該処理は、既に述べたように取得部125によって行われる。
ステップS03に続くステップS04では、ステップS03で取得された過熱度について偏差量が、予め設定された所定値よりも小さいか否かが判定される。ここでいう「偏差量」とは、取得部125で取得される過熱度と、過熱度について設定された目標値との差、の絶対値のことである。偏差量の算出は制御部130によって行われる。尚、上記の目標値は、予め空調ECU300によって決定され、制御モジュール100へと送信されていたものである。
過熱度の偏差量が所定値よりも小さい場合には、ステップS05に移行する。ステップS05では、電動膨張弁730の目標開度の算出が行われる。この目標開度は、上記の偏差量を0に近づけるために必要となる電動膨張弁730の開度のことである。目標開度の算出は制御部130によって行われる。
このような目標開度は、例えば、予め作成されたマップを参照することにより算出することができる。また、空調ECU300から送信される電動膨張弁730の開度の目標値に対して、マップに基づき決定された補正値を加算することにより、目標開度が算出されることとしてもよい。
ステップS05に続くステップS06では、電動膨張弁730の開度を、ステップS05で算出された目標開度に一致させるよう、電動膨張弁730(具体的には電動アクチュエータ730M)を駆動する処理が行われる。当該処理は制御部130によって行われる。これにより、電動膨張弁730の開度が目標開度に一致した状態となり、室外用熱交換器740の出口部分における冷媒の過熱度は目標値に近づいて行く。
ステップS04において、過熱度の偏差量が所定値以上であった場合には、ステップS07に移行する。ステップS07では、シャッタ装置20の目標開度の算出が行われる。この目標開度は、上記の偏差量を0に近づけるために必要となるシャッタ装置20の開度のことである。目標開度の算出は制御部130によって行われる。
このような目標開度は、例えば、予め作成されたマップを参照することにより算出することができる。また、エンジンECU200から送信されるシャッタ装置20の開度の目標値に対して、マップに基づき決定された補正値を加算することにより、目標開度が算出されることとしてもよい。
ステップS07に続くステップS08では、シャッタ装置20の開度を、ステップS07で算出された目標開度に一致させるよう、シャッタ装置20(具体的にはシャッタアクチュエータ22)を駆動する処理が行われる。これにより、シャッタ装置20の開度が目標開度に一致した状態となり、室外用熱交換器740の出口部分における冷媒の過熱度は目標値に近づいて行く。
以上のように、本実施形態に係る制御モジュール100では、制御部130が、取得部125で取得される過熱度に基づいてシャッタ装置20(空気制御装置)の動作を制御し、これにより過熱度を調整することが可能となっている。具体的には、取得部125で取得される過熱度が目標値に一致するように、シャッタ装置20の動作を制御することが可能となっている(ステップS07,S08)。
また、制御モジュール100では、制御部130が、取得部125で取得される過熱度に基づいて電動膨張弁730(冷媒制御装置)の動作を制御し、これにより過熱度を調整することも可能となっている。具体的には、取得部125で取得される過熱度が目標値に一致するように、電動膨張弁730の動作を制御することが可能となっている(ステップS05,S06)。
つまり、制御モジュール100では、室外用熱交換器740の出口部分における冷媒の過熱度を調整する過熱度調整制御として、2種類の態様の制御を行うことが可能となっている。一つ目の態様は、空気制御装置であるシャッタ装置20の動作を制御することにより、過熱度を調整するものである(ステップS07,S08)。以下では、このような態様の過熱度調整制御のことを「第1制御」とも称する。もう1つは、冷媒制御装置である電動膨張弁730の動作を制御することにより、過熱度を調整するものである(ステップS05,S06)。以下では、このような態様の過熱度調整制御のことを「第2制御」とも称する。
尚、電動膨張弁730の開度を変化させること、すなわち第2制御を行うことによって冷媒の過熱度を調整する場合には、過熱度の変化速度は比較的小さい。これに対し、室外用熱交換器740を通過する空気の流量を変化させること、すなわち第1制御を行うことによって冷媒の過熱度を調整する場合には、過熱度の変化速度は比較的大きい。
本実施形態では、過熱度の偏差量が所定値よりも小さく、過熱度を大きく変化させる必要が無い場合(ステップS04でYes)には、応答速度の比較的小さな第2制御によって過熱度の調整を行う。一方、過熱度の偏差量が所定値以上であり、過熱度を大きく変化させる必要が有る場合(ステップS04でNo)には、応答速度の比較的大きな第1制御によって過熱度の調整を行う。このように、状況に応じて第1制御と第2制御とを適切に使い分けることにより、過熱度を目標値に一致させることができる。
図8(A)に示されるのは、比較例に係る熱交換ユニット10において、室外用熱交換器74から排出される冷媒の過熱度の時間変化の一例である。この比較例においては、電動膨張弁730の開度を調整する制御のみにより、過熱度を目標値SVに一致させる制御が行われている。また、この比較例では、過熱度の取得や調整のための処理が、制御モジュール100ではなく空調ECU300によって行われる構成となっている。
図8(A)の例では、時刻t0において過熱度が急変しており、目標値SVから値MVまで急激に低下している。このため、空調ECU300は、過熱度が値MVから目標値SVに戻るように、電動膨張弁730の開度が小さくなるよう、電動膨張弁730を動作させる処理を行う。
しかしながら、空調ECU300からの制御信号が制御モジュール100に到達し、電動膨張弁730の開度が変化し始めるまでには、通信のタイムラグが生じる。このため、図8(A)の例では、時刻t0よりも後の時刻t10において、電動膨張弁730の開度が変化し始めている。時刻t0から時刻t10までの期間TM10が、上記のタイムラグに該当する。
時刻t10以降は、電動膨張弁730が動作してその開度が変化していく。これにより、室外用熱交換器740の出口部分における冷媒の過熱度は次第に上昇して行き、時刻t20において目標値SVに一致する。ただし、既に述べたように、電動膨張弁730の開度が変化する際における過熱度の変化速度は比較的小さい。このため、電動膨張弁730が動作し始めた時刻t10から、過熱度が目標値SVに一致する時刻t20までの期間TM21は、比較的長くなっている。
図8(B)に示されるのは、他の比較例に係る熱交換ユニット10において、室外用熱交換器740から排出される冷媒の過熱度の時間変化の一例である。この比較例においては、シャッタ装置20の開度を調整する制御のみにより、過熱度を目標値SVに一致させる制御が行われている。尚、この比較例でも図8(A)の例と同様に、過熱度の取得や調整のための処理が、制御モジュール100ではなく空調ECU300によって行われる構成となっている。
図8(B)の例でも、時刻t0において過熱度が急変しており、目標値SVから値MVまで急激に低下している。このため、空調ECU300は、過熱度が値MVから目標値SVに戻るように、シャッタ装置20の開度が大きくなるよう、シャッタ装置20を動作させる処理を行う。
図8(B)の例でも、空調ECU300からの制御信号が制御モジュール100に到達し、シャッタ装置20の開度が変化し始めるまでには、通信のタイムラグが生じる。このため、やはり時刻t0よりも後の時刻t10において、シャッタ装置20の開度が変化し始めている。時刻t0から時刻t10までの期間TM10が、上記のタイムラグに該当する。
時刻t10以降は、シャッタ装置20が動作してその開度が変化していく。これにより、室外用熱交換器740の出口部分における冷媒の過熱度は次第に上昇して行き、時刻t15において目標値SVに一致する。既に述べたように、シャッタ装置20の開度が変化する際における過熱度の変化速度は比較的大きい。このため、シャッタ装置20が動作し始めた時刻t10から、過熱度が目標値SVに一致する時刻t15までの期間TM22は、図8(A)における期間TM21よりも短くなっている。
図8(C)に示されるのは、本実施形態に係る熱交換ユニット10において、室外用熱交換器740から排出される冷媒の過熱度の時間変化の一例である。図8(C)の例では、第1制御、すなわちシャッタ装置20の開度を調整する制御のみにより、過熱度を目標値SVに一致させる制御が行われている。
図8(C)の例では、図8(A)や図8(B)に示される比較例とは異なり、過熱度の取得や調整のための処理が制御モジュール100によって行われる。つまり、空調ECU300との通信によるタイムラグが生じない。従って、過熱度が急変して値MVまで低下するのとほぼ同時(時刻t0)に、シャッタ装置20の開度を変化させ始めることが可能となっている。その後、時刻t0よりも後の時刻t5において、過熱度が目標値SVに一致している。時刻t0から時刻t5までの期間TM23は、図8(B)における期間TM22と同じ長さの期間となっている。
このように、本実施形態では、図8(A)や図8(B)に示される比較例に比べて、冷媒の過熱度を迅速に変化させ、より短い期間内で目標値SVに一致させることが可能となっている。
以上に説明したような制御モジュール100の機能を、エンジンECU200や空調ECU300のような上位のECUが有するような態様としてもよい。つまり、エンジンECU200等が制御モジュール100として機能するような態様としてもよい。しかしながら、通信のタイムラグや機器の配置等に鑑みれば、本実施形態のように、熱交換ユニット10の制御を担う専用の装置として制御モジュール100が構成されている態様の方が好ましい。
第2実施形態について説明する。以下では、第1実施形態と異なる点についてのみ説明し、第1実施形態と共通する点については適宜説明を省略する。本実施形態では、制御モジュール100によって実行される処理の内容について第1実施形態と異なっており、その他の点については第1実施形態と同じである。本実施形態における過熱度調整制御の具体的な態様について、図9を参照しながら説明する。
図9に示される一連の処理は、所定の制御周期が経過する毎に、制御モジュール100によって繰り返し実行される処理である。当該処理は、図7に示される一連の処理に換えて実行されるものである。
最初のステップS11では、温度センサ62で測定された温度、すなわち、室外用熱交換器740から排出される冷媒の温度が取得される。ステップS11に続くステップS12では、圧力センサ61で測定された圧力、すなわち、室外用熱交換器740から排出される冷媒の圧力が取得される。
ステップS12に続くステップS13では、ステップS11で取得された冷媒の温度、及びステップS12で取得された冷媒の圧力に基づいて、冷媒の過熱度が取得(算出)される。当該処理は、既に述べたように取得部125によって行われる。
ステップS13に続くステップS14では、電動膨張弁730の目標開度の算出が行われる。この目標開度は、既に説明した偏差量を0に近づけるために必要となる電動膨張弁730の開度のことである。目標開度の算出は制御部130によって行われる。
図10に示されるのは、ステップS13で取得された過熱度(横軸)と、ステップS14で算出される目標開度(縦軸)との対応関係である。当該対応関係は、マップとして予め作成され、制御モジュール100の記憶装置に記憶されている。ステップS14では、図10の対応関係に基づいて、電動膨張弁730の目標開度が算出される。
図10に示されるように、取得部125で取得された過熱度が大きくなるほど、目標開度は大きくなる(開放側となる)ように設定される。これにより、室外用熱交換器740における冷媒の温度が上昇し、室外用熱交換器740における吸熱量が小さくなる。その結果、室外用熱交換器740の出口部分における過熱度が小さくなる。
また、取得部125で取得された過熱度が小さくなるほど、目標開度は小さくなる(絞り側となる)ように設定される。これにより、室外用熱交換器740における冷媒の温度が低下し、室外用熱交換器740における吸熱量が大きくなる。その結果、電動膨張弁730の出口部分における過熱度が大きくなる。
ステップS14に続くステップS15では、シャッタ装置20の目標開度の算出が行われる。この目標開度は、既に説明した差量を0に近づけるために必要となるシャッタ装置20の開度のことである。目標開度の算出は制御部130によって行われる。
図11に示されるのは、ステップS13で取得された過熱度(横軸)と、ステップS15で算出される目標開度(縦軸)との対応関係である。当該対応関係は、マップとして予め作成され、制御モジュールの記憶装置に記憶されている。ステップS15では、図11の対応関係に基づいて、シャッタ装置20の目標開度が算出される。
図11に示されるように、取得部125で取得された過熱度が大きくなるほど、目標開度は小さくなる(絞り側となる)ように設定される。これにより、室外用熱交換器740を通過する空気の流量が低下し、室外用熱交換器740における吸熱量が小さくなる。その結果、室外用熱交換器740の出口部分における過熱度が小さくなる。
また、取得部125で取得された過熱度が小さくなるほど、目標開度は大きくなる(開放側となる)ように設定される。これにより、室外用熱交換器740を通過する空気の流量が増加し、室外用熱交換器740における吸熱量が大きくなる。その結果、電動膨張弁730の出口部分における過熱度が大きくなる。
ステップS15に続くステップS16では、電動膨張弁730の開度を、ステップS14で算出された目標開度に一致させるよう、電動膨張弁730(具体的には電動アクチュエータ730M)を駆動する処理が行われる。当該処理は制御部130によって行われる。これにより、電動膨張弁730の開度が目標開度に一致した状態となり、室外用熱交換器740の出口部分における冷媒の過熱度は目標値に近づいて行く。
ステップS16に続くステップS17では、シャッタ装置20の開度を、ステップS15で算出された目標開度に一致させるよう、シャッタ装置20(具体的にはシャッタアクチュエータ22)を駆動する処理が行われる。これにより、シャッタ装置20の開度が目標開度に一致した状態となり、室外用熱交換器740の出口部分における冷媒の過熱度は目標値に近づいて行く。
以上のように、本実施形態に係る制御モジュール100では、室外用熱交換器740を通過する空気の流量を変化させる第1制御(ステップS17)と、電動膨張弁730の開度を変化させる第2制御(ステップS16)とが、並行して行われる。このような態様でも、第1実施形態について説明したものと同様の効果を奏する。また、本実施形態では、第1制御と第2制御とが同時に行われるので、過熱度をより広い範囲で変化させることが可能となっている。このため、車両用空調装置70の運転中における過熱度を更に安定させることができる。
第3実施形態について説明する。以下では、第1実施形態と異なる点についてのみ説明し、第1実施形態と共通する点については適宜説明を省略する。本実施形態では、制御モジュール100によって実行される処理の内容について第1実施形態と異なっており、その他の点については第1実施形態と同じである。本実施形態における過熱度調整制御の具体的な態様について、図12を参照しながら説明する。
図12に示される一連の処理は、所定の制御周期が経過する毎に、制御モジュール100によって繰り返し実行される処理である。当該処理は、図7に示される一連の処理に換えて実行されるものである。
最初のステップS21では、温度センサ62で測定された温度、すなわち、室外用熱交換器740から排出される冷媒の温度が取得される。ステップS21に続くステップS22では、圧力センサ61で測定された圧力、すなわち、室外用熱交換器740から排出される冷媒の圧力が取得される。
ステップS22に続くステップS23では、ステップS21で取得された冷媒の温度、及びステップS22で取得された冷媒の圧力に基づいて、冷媒の過熱度が取得(算出)される。当該処理は、既に述べたように取得部125によって行われる。
ステップS23に続くステップS24では、風速センサ63で測定された風速に基づいて、室外用熱交換器740を通過する空気の風量が算出され取得される。
ステップS24に続くステップS25では、ステップS23で取得された過熱度と、ステップS24で算出された風量とに基づいて、シャッタ装置20の目標開度の算出が行われる。この目標開度は、過熱度をその目標値に近づけるために必要となるシャッタ装置20の開度のことである。目標開度の算出は制御部130によって行われる。
ステップS25に続くステップS26では、シャッタ装置20の開度を、ステップS25で算出された目標開度に一致させるよう(つまり偏差量を0に近づけるよう)、シャッタ装置20(具体的にはシャッタアクチュエータ22)を駆動する処理が行われる。当該処理は制御部130によって行われる。これにより、シャッタ装置20の開度が目標開度に一致した状態となり、室外用熱交換器740の出口部分における冷媒の過熱度は目標値に近づいて行く。
図13に示されるのは、図12で示される上記処理の内容を、所謂ブロック線図として描いたものである。ブロックB1は、室外用熱交換器740の出口部分における過熱度の目標値を示すものである。既に述べたように、当該目標値は空調ECU300によって予め決定され、制御モジュール100に送信されたものである。
ブロックB2は所謂加算器である。ブロックB2では、ブロックB1から入力される過熱度の目標値と、後述のブロックB11から入力される実際の過熱度との偏差が算出され、当該偏差がブロックB3に向けて出力される。
ブロックB3では、上記の偏差に基づいて、室外用熱交換器740を通過する空気の風量についての目標値が算出される。ここでは、予め作成されたマップを算出することにより、上記の偏差を0とするために必要な風量の目標値が算出される。算出された風量の目標値は、ブロックB4に向けて出力される。
ブロックB4は加算器である。ブロックB4では、ブロックB3から入力される風量の目標値と、後述のブロックB13から入力される実際の風量との偏差が算出され、当該偏差がブロックB5に向けて出力される。
ブロックB5では、上記の偏差に基づいて、シャッタ装置20の目標開度が算出される。当該目標開度は、図12のステップS25で算出される目標開度のことである。ブロックB5では、予め作成されたマップを算出することにより、ブロックB4から入力される偏差を0とするために必要な目標開度が算出される。算出された目標開度は、ブロックB7に向けて出力される。
尚、上記のブロックB5では、ブロックB6から入力される電動ファン40の作動状態に基づいて、目標開度が予め補正される。当該処理は制御部130により実行される。「電動ファン40の作動状態」とは、電動ファン40の回転数のことである。ブロックB5では、電動ファン40の回転数が大きくなるほど、シャッタ装置20の開度が小さくなるように、上記の目標開度が補正される。このため、例えば電動ファン40が過回転となっているときに、室外用熱交換器740を通過する空気の風量が大きくなり過ぎてしまい、過熱度が目標値からずれてしまうようなことが防止される。
尚、「電動ファン40の作動状態」として用いられるパラメータは、本実施形態のように電動ファン40の回転数そのものであってもよいが、電動ファン40の回転数を間接的に示すものであってもよい。例えば、ファンモータ42を流れる電流値が、「電動ファン40の作動状態」として用いられてもよい。
このように、本実施形態における制御部130では、室外用熱交換器740に空気を送り込む電動ファン40の回転数に応じて、シャッタ装置20の開度を変化させる制御が行われる。具体的には、制御部130は、電動ファン40の回転数が大きくなるほどシャッタ装置20の開度を小さくするような処理を行う。これにより、電動ファン40の作動状態が変化して空気の風量が変動した場合であっても、過熱度を確実に目標値に近づけることが可能となっている。
ブロックB5で算出されたシャッタ装置20の目標開度は、ブロックB7に入力される。ブロックB7では、シャッタ装置20の開度を目標開度に一致させる処理が行われる。つまり、ブロックB7は、図12のステップS26に示される処理を示すものである。
ブロックB7においてシャッタ装置20の開度が調整された結果、シャッタ装置20及び室外用熱交換器740を通過する空気の風量が変化する。ブロックB8は、このような風量の変化を示すブロックである。また、室外用熱交換器740を通過する空気の風量が変化すると、室外用熱交換器740から排出される冷媒の状態(圧力及び温度)も変化する。ブロックB9は、このように変化する冷媒状態を示すブロックである。
ブロックB10では、上記のように変化した冷媒状態が取得される。具体的には、圧力センサ61によって冷媒の圧力が取得され、温度センサ62によって冷媒の温度が取得される。このように、ブロックB10は、図12のステップS21、S22に示される処理を示すものである。ブロックB10で取得された冷媒の圧力及び温度は、ブロックB11に入力される。
ブロックB11では、冷媒の圧力及び温度に基づいて、室外用熱交換器740の出口部分における冷媒の過熱度が算出され取得される。ブロックB11は、図12のステップS23に示される処理を示すものである。ブロックB11で算出された過熱度はブロックB2に入力され、既に述べたように過熱度の偏差の算出に供される。
ブロックB12では、室外用熱交換器740を通過する空気の風速が、風速センサ63によって取得される。取得された風速はブロックB13に入力される。ブロックB13では、ブロックB12から入力された風速が、室外用熱交換器740を通過する空気の「風量」に変換される。当該風量はブロックB4に入力され、既に述べたように風量の偏差の算出に供される。
以上のように、図13に示される処理は、過熱度を目標値に一致させるためのフィードバックループの内側に、風量を目標値に一致させるためのフィードバックループが形成された処理となっている。このような処理では、風量についての調整が行われることにより、過熱度を更に精度よく制御することが可能となっている。
第4実施形態について説明する。以下では、第3実施形態と異なる点についてのみ説明し、第3実施形態と共通する点については適宜説明を省略する。本実施形態では、制御モジュール100によって実行される処理の一部について第3実施形態と異なっており、その他の点については第3実施形態と同じである。本実施形態における過熱度調整制御の具体的な態様について、図14を参照しながら説明する。
図14に示される一連の処理は、所定の制御周期が経過する毎に、制御モジュール100によって繰り返し実行される処理である。当該処理は、図12に示される一連の処理に換えて実行されるものである。図14に示される一連の処理は、図12に示される一連の処理のうち、ステップS24をステップS31に置き換えて、ステップS25をステップS32に置き換えたものとなっている。図14に示される各ステップのうち、図12に示されるステップと共通するものについては、図12と同一の符号(S21等)が付してある。
ステップS23に続いて実行されるステップS31では、車速センサ201で測定された車速、すなわち、車両50の走行速度が取得される。ステップS31に続くステップS32では、ステップS23で取得された過熱度と、ステップS31で取得された走行速度とに基づいて、シャッタ装置20の目標開度の算出が行われる。この目標開度は、過熱度をその目標値に近づけるために必要となるシャッタ装置20の開度のことである。目標開度の算出は制御部130によって行われる。
図15に示されるのは、図14で示される一連の処理の内容を、所謂ブロック線図として描いたものである。図15に示される各ブロックのうち、図13に示されるブロックと共通するものについては、図13と同一の符号(B1等)が付してある。以下では、図13との相違点についてのみ説明する。
本実施形態では、図13のブロックB3が、ブロックB31に置き換えられている。ブロックB31では、ブロックB3と同様に、室外用熱交換器740を通過する空気の風量についての目標値が算出される。ただし、ブロックB31では、ブロックB4から入力される偏差に加えて、車速センサ201で測定された車速にも基づいて風量の目標値が算出される。図15では、車速センサ201で測定された車速がブロックB32として示されている。ブロックB32は、図14のステップS31に示される処理を示すもの、ということができる。
ブロックB31では、ブロックB32から入力される車速、すなわち車両50の走行速度に基づいて、算出される風量の目標値が補正される。当該処理は制御部130により実行される。具体的には、車両50の走行速度が大きくなるほど、風量の目標値が小さくなるように補正される。また、車両50の走行速度が小さくなるほど、風量の目標値が大きくなるように補正される。算出された風量の目標値は、ブロックB33に入力される。
本実施形態では、図13のブロックB5が、ブロックB33に置き換えられている。本実施形態では、風量の実測値をフィードバックするようなループ(図13のブロックB12、ブロックB13、及びブロックB4)が存在しない。ブロックB33では、ブロックB31から入力される風量の目標値に応じて、シャッタ装置20の目標開度が算出される。つまり、本実施形態では、シャッタ装置20の目標開度がフィードフォワードにより決定される。
ブロックB33では、入力される風量の目標値が大きくなるほど、シャッタ装置20の目標開度が大きな値(開放側の値)として算出される。また、入力される風量の目標値が小さくなるほど、シャッタ装置20の目標開度が小さな値(絞り側の値)として算出される。このような対応関係は、予めマップとして作成され、制御モジュール100の記憶装置に記憶されている。尚、ブロックB33においても、ブロックB6から入力される電動ファン40の作動状態に基づいて、算出される目標開度が補正される。具体的な補正の方法は、図13において説明したものと同じである。
以上のように、本実施形態における制御部130では、車両50の走行速度に応じてシャッタ装置20の開度を変化させる制御が行われる。具体的には、制御部130では、車両50の走行速度が大きくなるほど風量の目標値を低く設定し(ブロックB31)、これによりシャッタ装置20の開度を小さくする(ブロックB33)ような制御が行われる。また、制御部130では、車両50の走行速度が大きくなるほど風量の目標値を低く設定し(ブロックB31)、これによりシャッタ装置20の開度を小さくする(ブロックB33)ような制御が行われる。これにより、車両50の走行速度に応じてフロントグリルGRから流入する風量が変動した場合であっても、過熱度を確実に目標値に近づけることが可能となっている。
以上の説明においては、過熱度調整制御においてその動作が制御される空気制御装置として、シャッタ装置20が用いられる場合の例について説明した。このような態様に替えて、過熱度調整制御における制御対象として電動ファン40が用いられるような態様であってもよい。この場合、過熱度を小さくする必要が有るときは、電動ファン40の回転数を減少させる制御が行われることとなる。逆に、過熱度を大きくする必要が有るときは、電動ファン40の回転数を増加させる制御が行われることとなる。
以上、具体例を参照しつつ本実施形態について説明した。しかし、本開示はこれらの具体例に限定されるものではない。これら具体例に、当業者が適宜設計変更を加えたものも、本開示の特徴を備えている限り、本開示の範囲に包含される。前述した各具体例が備える各要素およびその配置、条件、形状などは、例示したものに限定されるわけではなく適宜変更することができる。前述した各具体例が備える各要素は、技術的な矛盾が生じない限り、適宜組み合わせを変えることができる。