JP6660496B2 - 測定装置、測定方法およびプログラム - Google Patents
測定装置、測定方法およびプログラム Download PDFInfo
- Publication number
- JP6660496B2 JP6660496B2 JP2019021501A JP2019021501A JP6660496B2 JP 6660496 B2 JP6660496 B2 JP 6660496B2 JP 2019021501 A JP2019021501 A JP 2019021501A JP 2019021501 A JP2019021501 A JP 2019021501A JP 6660496 B2 JP6660496 B2 JP 6660496B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- illuminometer
- measuring device
- dimensional
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 52
- 238000005259 measurement Methods 0.000 claims description 192
- 230000008569 process Effects 0.000 claims description 21
- 238000004364 calculation method Methods 0.000 claims description 15
- 238000005286 illumination Methods 0.000 claims description 4
- 238000012545 processing Methods 0.000 description 19
- 238000004891 communication Methods 0.000 description 15
- 230000006870 function Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 6
- 238000002271 resection Methods 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 5
- 230000008602 contraction Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 3
- 230000001678 irradiating effect Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000011426 transformation method Methods 0.000 description 1
Images









Description
(概要)
図1には、実施形態における照度の測定を行なう作業の概要が示されている。この例では、作業者100が、測定ユニット200を用いて予め定められた測定点における照度を測定する。図1には、作業者100が測定ユニット200および端末300を持って移動し、3カ所において測定を行なう場合の例が概念的に示されている。
(測定ユニット)
測定ユニット200は、棒状の支持ポール201、支持ポール201の先端に固定された反射プリズム202、反射プリズム202の上に固定された照度計203を備えている。支持ポール201は、伸縮が可能であり、反射プリズム202および照度計203の高さの位置を作業者が希望する位置に調整できる構造を有している。支持ポール210を伸縮させる機構は、作業者が手動で行う構造が採用されている。この伸縮を行う機構として、各種のアクチュエータや電動モータを用いることもできる。
位置測定装置400は、測定用レーザ光を周囲に向かって走査しつつ照射する。この測定用レーザ光が反射プリズム202に当たるとそこで反射され、その反射光が位置測定装置400で受光される。位置測定装置400は、測定用レーザ光の照射方向と伝搬時間とから位置測定装置400からの反射プリズム202の方向と距離を算出する。この結果、位置測定装置400に対する反射プリズム202の相対的な位置関係が判明する。ここで、位置測定装置400の位置を予め定めておくことで、反射プリズム202の位置の情報が得られる。この例では、後述する車両のヘッドライトおよびテールライトの測定を行う想定フィールド(測定が行われる場所)における位置測定装置400の位置を予め決めておく。例えば、上述した測定フィールドには当該測定フィールド内での位置が明確な基準点が一または複数設けられており、この基準点に位置測定装置400を設置することで、当該測定フィールドにおける位置測定装置400の位置を予め既知点とすることができる。なお、位置測定装置400の位置を予め高精度GNSS装置等を用いて測定する方法も可能である。
図1に戻り、作業者100は、端末300を携帯している。端末は、携帯型の汎用コンピュータとして利用可能な市販のタブレットであり、CPU、メモリおよび各種のインターフェースを備えている。端末300としては、汎用のコンピュータを利用する以外に専用の端末を用意し、それを用いてもよい。作業者100は、端末300を用いて照度の測定に係る作業を行う。
位置測定装置400は、ターゲットである図1の反射プリズム202の位置を測定し、その情報を端末300に無線通信で送信する。端末300は、予め定めた測定予定位置と位置測定装置400が測定した反射プリズム202の測定位置とを比較し、その位置関係を算出する。また、反射プリズム202の測定予定位置と実際に測定した測定位置との位置関係が端末300の表示部307にグラフィカルに表示される(図4参照)。
図4に端末300(図3参照)の表示部307に表示されるGUI画面(UI画面)の一例を示す。図4に示す画面を用いたGUIの制御は、GUI制御部306において行われる。図4(A)には、その時点における反射プリズム202の位置を基準とした測定予定位置の方向(方位)、測定予定位置までの水平方向の距離、および垂直方向の距離が表示されている。図4の場合、その時点における反射プリズム202に位置から、右斜め前方45°の方向に水平距離で12m、垂直方向に+1.2mの位置に測定予定位置がある状態が示されている。なお、詳細は後述するが、端末300は、姿勢センサを有し、図4の表示画面の向きを周囲環境に合った向きとなるように表示が制御されている。すなわち、端末300の向きによらず、表示される矢印が常に測定予定位置の方向を向くように矢印の表示が制御されている。
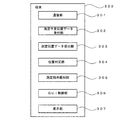
図5には、処理の手順の一例を示すフローチャートが示されている。図5の処理を実行するためのプログラムは、端末300内のメモリに記憶されている。このプログラムは、適当な記憶媒体に記憶させ、そこから提供される形態であってもよい。これは、図5や図9の処理についても同じである。
上記の例によれば、端末の表示部に測定すべき位置への誘導を促す表示が行われるので、照度計203の位置の特定に係る作業を効率化できる。
(初めに)
本実施形態は、第1の実施形態において、位置測定装置400の位置のデータを取得する技術に関する。第1の実施形態では、最初に測定フィールドにおける位置測定装置400の位置を決め、その位置データを取得する必要がある。位置測定装置400の設置位置が予め決められている場合、第1の実施形態の方法で問題はないが、位置測定装置400の設置位置が予め決められていない場合、位置決めのための作業が必要となる。本実施形態によれば、位置測定装置400の位置を決める作業の負担が軽減される。
本実施形態では、図3の端末300の代わりに図8に示す端末310を利用する。端末310は、図3の端末300に点群位置データ取得部311、三次元モデル作成部312、三次元モデルマッチング部313および位置測定装置の位置算出部314を追加した構成を有する。図8において、図3と共通する部分の機能は、図3の場合と同じである。また、機能部をソフトウェア的に構成するのか、専用のハードウェアで構成するのかに関する点も図3の場合と同じである。
この例では、位置測定装置400の測定フィールドにおける位置を決める処理が以下のようにして行われる。図9に処理の手順の一例を示す。この処理では、まず、位置測定装置400を測定フィールド内の適切な位置に設置する(図6(B)参照)。この際、位置測定装置400から車両600が見え、且つ、格子状に設定された測定予定位置601が見える位置に位置測定装置400を設置する。この時点で位置測定装置400の測定フィールドにおける位置は不明あるいは不明確であってもよい。この状態で以下の処理が開始される。
照度に加えて、色度や波長分布特性等のデータの測定を行うこともできる。また、通信用の電磁波(例えば、無線LANの電波)の測定、ガンマ線等の放射線の測定、視認できない紫外領域や赤外領域の光の測定、高圧送電線や高圧電気設備が発生する電磁波の測定といった技術に本発明を利用することができる。
Claims (9)
- 照度計による照度の測定を行う候補となる測定予定位置の三次元位置と位置測定装置によって測定された前記照度計の三次元位置との関係を表示装置に表示するための制御を行う制御部を備えることを特徴とする測定装置。
- 前記制御部は、前記測定予定位置への方向と距離を表示する制御を行うことを特徴とする請求項1に記載の測定装置。
- 前記測定予定位置と前記測定された前記照度計の三次元位置との間の距離が予め定めた値以下となった段階で報知表示を行う制御を行う報知制御部を備えることを特徴とする請求項1または2に記載の測定装置。
- 前記照度計が測定する照明光の発生源を備えた対象物の点群位置データを取得する点群位置データ取得部と、
前記測定予定位置と前記対象物との位置関係および前記点群位置データに基づいて作成された前記対象物の三次元モデルに基づき、前記対象物に対する前記位置測定装置の位置を算出する位置算出部と
を備えることを特徴とする請求項1〜3のいずれか一項に記載の測定装置。 - 前記位置測定装置は、レーザスキャナの機能を有し、
前記点群位置データは、前記レーザスキャナの機能によって得られることを特徴とする請求項4に記載の測定装置。 - 前記位置算出部は、前記対象物と前記三次元モデルの対応関係に基づき、前記対象物に対する前記位置測定装置の位置を算出することを特徴とする請求項4または5に記載の測定装置。
- 前記位置算出部は、
前記対象物と前記三次元モデルの対応関係から前記三次元モデルを構成する複数の点の位置を求める処理と、
該処理で求めた前記複数の点の座標に基づく後方交会法により前記位置測定装置の位置を求める処理と
を行うことを特徴とする請求項6に記載の測定装置。 - 照度計による照度の測定を行う候補となる測定予定位置の三次元位置と位置測定装置によって測定された前記照度計の三次元位置との関係を表示装置に表示するための制御を行う制御ステップを備えることを特徴とする測定方法。
- コンピュータに読み取らせて実行させるプログラムであって、
コンピュータに
照度計による照度の測定を行う候補となる測定予定位置の三次元位置と位置測定装置によって測定された前記照度計の三次元位置との関係を表示装置に表示するための制御を行う制御ステップを実行させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019021501A JP6660496B2 (ja) | 2019-02-08 | 2019-02-08 | 測定装置、測定方法およびプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019021501A JP6660496B2 (ja) | 2019-02-08 | 2019-02-08 | 測定装置、測定方法およびプログラム |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015197594A Division JP6482447B2 (ja) | 2015-10-05 | 2015-10-05 | 測定装置、測定方法およびプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019090830A JP2019090830A (ja) | 2019-06-13 |
| JP6660496B2 true JP6660496B2 (ja) | 2020-03-11 |
Family
ID=66836259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019021501A Active JP6660496B2 (ja) | 2019-02-08 | 2019-02-08 | 測定装置、測定方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6660496B2 (ja) |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08178615A (ja) * | 1994-12-21 | 1996-07-12 | Nosakubutsu Seiiku Kanri Syst Kenkyusho:Kk | 移動体の位置検出装置及び誘導装置 |
| JPH109951A (ja) * | 1996-06-26 | 1998-01-16 | Toenec Corp | 移動式照度測定装置 |
| JP4708558B2 (ja) * | 2000-12-27 | 2011-06-22 | 株式会社トプコン | 位置誘導装置 |
| JP2002341031A (ja) * | 2001-05-11 | 2002-11-27 | Daiei Dream Kk | レーザレーダを用いた三次元モデルの作成方法及び三次元スキャナシステム |
| JP3837552B2 (ja) * | 2003-07-08 | 2006-10-25 | 国立大学法人名古屋大学 | 移動式光環境測定装置 |
| JP4263549B2 (ja) * | 2003-07-23 | 2009-05-13 | 株式会社トプコン | 測量誘導装置 |
| JP5620200B2 (ja) * | 2010-09-06 | 2014-11-05 | 株式会社トプコン | 点群位置データ処理装置、点群位置データ処理方法、点群位置データ処理システム、および点群位置データ処理プログラム |
| EP2431708A1 (de) * | 2010-09-16 | 2012-03-21 | Leica Geosystems AG | Geodätisches Vermessungssystem mit in einer Fernbedieneinheit integrierter Kamera |
| DE102012223928A1 (de) * | 2012-12-20 | 2014-06-26 | Hilti Aktiengesellschaft | Verfahren und Vorrichtung zum Bestimmen der Ortskoordinaten eines Zielobjektes |
| JP2015161586A (ja) * | 2014-02-27 | 2015-09-07 | ダイハツ工業株式会社 | 車両用前照灯の明るさ評価方法 |
-
2019
- 2019-02-08 JP JP2019021501A patent/JP6660496B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019090830A (ja) | 2019-06-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6482447B2 (ja) | 測定装置、測定方法およびプログラム | |
| JP6527804B2 (ja) | 電磁波の測定装置、電磁波の測定方法およびプログラム | |
| JP5599524B2 (ja) | レーザトラッカによる寸法データの自動計測 | |
| US9677755B1 (en) | Controlling three-dimensional lighting arrangements | |
| US10802145B2 (en) | Measuring device, measuring method, and programs therefor | |
| EP3226029A1 (en) | Laser scanner with referenced projector | |
| JP2020165717A (ja) | 点群データ処理方法および点群データ処理装置 | |
| NL1036517C2 (nl) | Inrichting en werkwijze voor het uitzetten van contouren of werken en een meetinrichting en aanwijsinrichting ingericht voor gebruik hierbij. | |
| JP6660496B2 (ja) | 測定装置、測定方法およびプログラム | |
| JP2017026411A (ja) | 照度測定システム | |
| JP2013023960A (ja) | トンネル施工情報投影システム | |
| JP2017078688A (ja) | 測定装置、測定方法および測定用プログラム | |
| JP7149506B2 (ja) | 投影システム、投影装置及び投影方法 | |
| US11725939B2 (en) | System and method for controlling a light projector in a construction site | |
| EP2922371B1 (en) | Techniques and photographical user interface for controlling solid-state luminaire with electronically adjustable light beam distribution | |
| JP2022152629A (ja) | 測量システム及び点群データ取得方法及び点群データ取得プログラム | |
| JP2020056765A (ja) | 測量データ処理装置、測量データ処理方法、測量データ処理用プログラム | |
| WO2023008305A1 (ja) | 測設点編集方法、測設点編集装置及び測設点編集プログラム | |
| CN113776520B (zh) | 地图构建、使用方法、装置、机器人和介质 | |
| US11436792B2 (en) | Three-dimensional stage mapping | |
| JP2021099287A (ja) | 照明評価システム、照明評価方法及びプログラム | |
| CN116399311A (zh) | 一种建筑规划设计应用的测量装置 | |
| JP2023100945A (ja) | 測量装置、測量方法および測量用プログラム | |
| JP2023087915A (ja) | パラボラアンテナ調整システム | |
| CN111238533A (zh) | 智能校准系统、方法、装置、电子设备及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6660496 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |