JP6639082B2 - リソグラフィ装置、リソグラフィ方法、および物品製造方法 - Google Patents
リソグラフィ装置、リソグラフィ方法、および物品製造方法 Download PDFInfo
- Publication number
- JP6639082B2 JP6639082B2 JP2014231051A JP2014231051A JP6639082B2 JP 6639082 B2 JP6639082 B2 JP 6639082B2 JP 2014231051 A JP2014231051 A JP 2014231051A JP 2014231051 A JP2014231051 A JP 2014231051A JP 6639082 B2 JP6639082 B2 JP 6639082B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- axis
- substrate
- measurement
- mark
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 23
- 238000004519 manufacturing process Methods 0.000 title claims description 9
- 238000005259 measurement Methods 0.000 claims description 77
- 239000000758 substrate Substances 0.000 claims description 29
- 230000003287 optical effect Effects 0.000 claims description 17
- 238000012545 processing Methods 0.000 claims description 8
- 238000001459 lithography Methods 0.000 claims description 6
- 230000001678 irradiating effect Effects 0.000 claims description 5
- 238000006073 displacement reaction Methods 0.000 claims description 4
- 238000010586 diagram Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000005530 etching Methods 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 238000000059 patterning Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000004441 surface measurement Methods 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7046—Strategy, e.g. mark, sensor or wavelength selection
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70775—Position control, e.g. interferometers or encoders for determining the stage position
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
Description
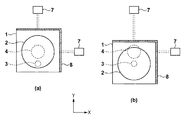
図1は本発明に係る露光装置を示す図である。露光装置は、図1に示すように、ウエハ(基板)2を保持して移動可能なウエハステージ(ステージ)1、投影光学系4、ウエハ2に形成されたアライメントマーク(マーク)を検出するスコープ(検出器)3、及び、制御部Cを備える。露光装置は、スコープ3によるアライメントマークの計測結果を基に、露光時のウエハステージ1の位置決めを行う。なお、本実施形態では、リソグラフィ装置として、光源6からの光でレチクル(マスク)5を照明し、照明されたレチクル5のパターンをウエハ2に投影して露光する露光装置を用いる。しかし、本発明では、インプリント装置、荷電粒子線描画装置をリソグラフィ装置として使用可能である。
図3〜5の(a)は、事前に低倍率でウエハ2のステージ1に対するZ軸(第1軸)周りの回転θZを計測する計測(第1計測)の様子を示している。図3〜5の(b)は、第1計測の後、ウエハ2のステージ1に対するZ軸周りの回転角度Δθを計測した後、露光処理時に使用するショット領域のX軸、Y軸(第2軸)方向の位置を取得するための高倍率のアライメント計測(第2計測)を行う様子を示す。第2計測は、観察視野が狭い高倍率でマークを観察するため、その狭い観察視野にマークが入るようにするためのステージ1の移動量を、低倍率の第1計測を行うことによって求めている。
X=rcos(θ+Δθ)=rcosθcosΔθ−rsinθsinΔθ=X0cosΔθ−Y0sinΔθ
Y=rsin(θ+Δθ)=rsinθcosΔθ+rcosθsinΔθ=Y0cosΔθ+X0sinΔθ
すなわち、ステージ1に対してウエハ2がΔθだけ回転ずれがあることによって、マークのX、Y座標は、以下の示すΔX、ΔYだけシフトずれする。
ΔX=X−X0=X0(1−cosΔθ)−Y0sinΔθ
ΔY=Y−Y0=Y0(1−cosΔθ)+X0sinΔθ
したがって、ウエハ2がステージ1に対してΔθだけ回転ずれしていても、図5(b)のようにマークがΔX、ΔYの分だけシフトずれしていると推定してステージ1を回転させずにシフト移動すれば、マークを第2計測の高倍率の観察視野内に入れうる。図5の(b)に示される第1実施形態の第2計測では、ステージ1の走り方向10は計測器の検出光の光軸方向と直交する。したがって、第1実施形態の第2計測では、アッベ誤差の影響がウエハ2の回転ずれ量に左右されることなく高倍率のアライメント計測を行うことができる。
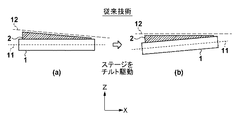
図8〜10の(a)は、事前に低倍率でウエハ2表面のY軸(第1軸)周りの回転θYを計測する計測(第1計測)の様子を示している。ここでは、Y軸周りの回転θYを計測する場合について説明するがX軸周りの回転θXを計測する場合についても同様である。ウエハ2表面のX軸、Y軸周りの回転θX、θYは、ウエハ2表面のチルトと呼ばれる。図8〜10の(b)は、第1計測の後、ウエハ2表面のY軸周りの回転を計測した後、露光処理時に使用するショット領域の位置を取得するための高倍率のアライメント計測(第2計測)を行う様子を示している。第2計測では、観察視野が狭い高倍率でマークを観察する。第2計測では、マークの位置を高精度に計測するため、スコープ3からの検出光をマークのZ軸(第2軸)方向における位置に合焦させる必要がある。したがって、図8に示されるように、ウエハ2表面のチルトがない場合には、第1計測の後第2計測を行う前にステージ1をY軸周りに回転駆動(チルト駆動)する必要はない。
物品としてのデバイス(半導体集積回路デバイス、液晶表示デバイス、MEMS等)の製造方法は、前述した露光装置を用いて基板(ウエハ、ガラスプレート、フィルム状基板等)にパターンを転写(形成)するステップを含む。さらに、該製造方法は、パターンを転写された前記基板をエッチングするステップを含みうる。なお、パターンドメディア(記録媒体)や光学素子などの他の物品を製造する場合には、該製造方法は、エッチングステップの代わりに、パターンを転写された前記基板を加工する他の加工ステップを含みうる。
Claims (7)
- 基板の上に投影光学系を介して光を照射してパターンを形成するリソグラフィ装置であって、
前記基板を保持して移動可能なステージと、
光を照射して、前記基板に形成されたマークの位置を計測するスコープと、
前記スコープにより計測された前記マークの位置に基づいて前記パターンの形成を行うように前記ステージの移動を制御する制御部と、を備え、
前記制御部は、
前記スコープにより、前記投影光学系の光軸に沿う第1方向における、前記基板に形成された第1マークの位置である第1位置を計測する第1計測を行い、
前記計測された第1位置に基づいて、前記第1方向に垂直な平面内において互いに直交するX軸およびY軸の少なくともいずれかの軸である第1軸の軸周りに関する前記基板の前記ステージに対する回転ずれの量を算出し、
前記算出された回転ずれの量に基づいて、前記第1方向における、前記基板に形成された第2マークの位置である第2位置を推定し、
前記推定された第2位置に基づいて、前記ステージを、前記X軸の周りおよび前記Y軸の周りに回転させることなく前記第1方向に移動させた後に、前記スコープにより、前記第1方向における前記第2マークの位置である第3位置を計測する第2計測を行う
ことを特徴とするリソグラフィ装置。 - 前記基板には前記第1マークが複数形成されており、
前記制御部は、前記第1計測において、前記複数の第1マークそれぞれの位置を計測することにより前記第1位置を複数得ることを特徴とする請求項1に記載のリソグラフィ装置。 - 前記制御部は、前記スコープにより第1倍率で前記第1計測を行い、前記スコープにより前記第1倍率より高い第2倍率で前記第2計測を行うことを特徴とする請求項1または2に記載のリソグラフィ装置。
- 前記X軸または前記Y軸の方向における前記ステージの位置を計測する計測器をさらに備え、前記制御部は、前記スコープにより計測された前記マークの位置および前記計測器により計測された前記ステージの位置に基づいて前記ステージを移動して前記パターンを形成することを特徴とする請求項1ないし3のいずれか1項に記載のリソグラフィ装置。
- 前記ステージは、バーミラーを含み、前記計測器は、前記バーミラーの面の位置を計測する干渉計を含むことを特徴とする請求項4に記載のリソグラフィ装置。
- ステージに保持された基板の上に投影光学系を介して光を照射してパターンを形成するリソグラフィ方法であって、
スコープにより光を照射して、前記投影光学系の光軸に沿う第1方向における、前記基板に形成された第1マークの位置である第1位置を計測する第1計測工程と、
前記第1計測工程で計測された前記第1位置に基づいて、前記第1方向に垂直な平面内において互いに直交するX軸およびY軸の少なくともいずれかの軸である第1軸の軸周りに関する前記基板の前記ステージに対する回転ずれの量を算出する算出工程と、
前記算出工程で算出された前記回転ずれの量に基づいて、前記第1方向における、前記基板に形成された第2マークの位置である第2位置を推定する推定工程と、
前記推定工程で推定された前記第2位置に基づいて、前記ステージを、前記X軸の周りおよび前記Y軸の周りに回転させることなく前記第1方向に移動させた後に、前記スコープにより、前記第1方向における前記第2マークの位置である第3位置を計測する第2計測工程と、
前記第2計測工程で計測された前記第3位置に基づいて前記ステージを移動させた後に前記パターンを形成する形成工程と、
を含むことを特徴とするリソグラフィ方法。 - 請求項1ないし5のいずれか1項に記載のリソグラフィ装置を用いて基板にパターンを形成する工程と、
前記パターンが形成された前記基板を加工する工程と、
を含み、前記加工された基板から物品を製造することを特徴とする物品製造方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014231051A JP6639082B2 (ja) | 2014-11-13 | 2014-11-13 | リソグラフィ装置、リソグラフィ方法、および物品製造方法 |
| US14/935,761 US10036967B2 (en) | 2014-11-13 | 2015-11-09 | Lithography apparatus, lithography method, and article manufacturing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014231051A JP6639082B2 (ja) | 2014-11-13 | 2014-11-13 | リソグラフィ装置、リソグラフィ方法、および物品製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016096228A JP2016096228A (ja) | 2016-05-26 |
| JP2016096228A5 JP2016096228A5 (ja) | 2017-12-28 |
| JP6639082B2 true JP6639082B2 (ja) | 2020-02-05 |
Family
ID=55961569
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014231051A Active JP6639082B2 (ja) | 2014-11-13 | 2014-11-13 | リソグラフィ装置、リソグラフィ方法、および物品製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10036967B2 (ja) |
| JP (1) | JP6639082B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109950133B (zh) * | 2019-03-14 | 2021-07-27 | 北京大学深圳研究生院 | 一种便于识别的碳化硅外延片圆片制备方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2694868B2 (ja) * | 1987-08-31 | 1997-12-24 | 株式会社ニコン | 位置検出方法及び装置 |
| JP3450580B2 (ja) | 1996-03-26 | 2003-09-29 | キヤノン株式会社 | 露光装置および露光方法 |
| JPH10209029A (ja) * | 1997-01-21 | 1998-08-07 | Nikon Corp | アライメント系を備える露光装置 |
| JP2000156336A (ja) * | 1998-11-20 | 2000-06-06 | Nikon Corp | アライメント方法及び露光装置 |
| JP4434372B2 (ja) * | 1999-09-09 | 2010-03-17 | キヤノン株式会社 | 投影露光装置およびデバイス製造方法 |
| JP2003092248A (ja) * | 2001-09-17 | 2003-03-28 | Canon Inc | 位置検出装置、位置決め装置及びそれらの方法並びに露光装置及びデバイスの製造方法 |
| DE10315086B4 (de) * | 2003-04-02 | 2006-08-24 | Infineon Technologies Ag | Verfahren und Vorrichtung zum Ausrichten von Halbleiterwafern bei der Halbleiterherstellung |
| JP4449457B2 (ja) | 2004-01-05 | 2010-04-14 | 株式会社ニコン | 露光装置及び露光方法 |
| TWI574304B (zh) * | 2006-09-01 | 2017-03-11 | 尼康股份有限公司 | Mobile body driving method and moving body driving system, pattern forming method and apparatus, exposure method and apparatus, component manufacturing method, and correcting method |
| JP5264406B2 (ja) * | 2008-10-22 | 2013-08-14 | キヤノン株式会社 | 露光装置、露光方法およびデバイスの製造方法 |
-
2014
- 2014-11-13 JP JP2014231051A patent/JP6639082B2/ja active Active
-
2015
- 2015-11-09 US US14/935,761 patent/US10036967B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016096228A (ja) | 2016-05-26 |
| US10036967B2 (en) | 2018-07-31 |
| US20160139515A1 (en) | 2016-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014131082A5 (ja) | リソグラフィ投影装置、オフセットを決定するための方法、露光方法、並びにデバイス製造方法 | |
| US9829794B2 (en) | Exposure apparatus, and method of manufacturing device | |
| TWI587101B (zh) | 微影裝置及曝光方法 | |
| JP2018072541A (ja) | パターン形成方法、基板の位置決め方法、位置決め装置、パターン形成装置、及び、物品の製造方法 | |
| JP2002050560A (ja) | ステージ装置、計測装置及び計測方法、露光装置及び露光方法 | |
| NL2021272A (en) | Methods of determining a mechanical property of a layer applied to a substrate, control system for a lithographic apparatus and lithographic apparatus | |
| JP2019086709A (ja) | 露光システム、露光方法、及び表示用パネル基板の製造方法 | |
| US10444635B2 (en) | Lithographic method and apparatus | |
| US9941177B2 (en) | Pattern accuracy detecting apparatus and processing system | |
| JPH1050604A (ja) | 位置管理方法及び位置合わせ方法 | |
| JP6639082B2 (ja) | リソグラフィ装置、リソグラフィ方法、および物品製造方法 | |
| JP2012133122A (ja) | 近接露光装置及びそのギャップ測定方法 | |
| JPH0353770B2 (ja) | ||
| JP2005011976A (ja) | 位置検出方法 | |
| US9366637B2 (en) | Method for establishing distortion properties of an optical system in a microlithographic measurement system | |
| JP2013149928A5 (ja) | ||
| JP2013149928A (ja) | リソグラフィー装置および物品を製造する方法 | |
| JPH1083954A (ja) | 露光装置 | |
| US7782441B2 (en) | Alignment method and apparatus of mask pattern | |
| JP2009170559A (ja) | 露光装置およびデバイス製造方法 | |
| JP2005285916A (ja) | アライメントマークの位置測定方法 | |
| JP2009054962A (ja) | 位置決め検出装置 | |
| JPH10308434A (ja) | 位置決め装置、ミラー曲り検出方法、位置決め方法およびデバイス製造方法 | |
| JP2016100541A (ja) | マスクステージ及びステージ装置 | |
| TW202147476A (zh) | 高度量測方法及高度量測系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171108 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180904 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181022 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191224 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6639082 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |