JP6603560B2 - 圧力補償ユニット - Google Patents
圧力補償ユニット Download PDFInfo
- Publication number
- JP6603560B2 JP6603560B2 JP2015237392A JP2015237392A JP6603560B2 JP 6603560 B2 JP6603560 B2 JP 6603560B2 JP 2015237392 A JP2015237392 A JP 2015237392A JP 2015237392 A JP2015237392 A JP 2015237392A JP 6603560 B2 JP6603560 B2 JP 6603560B2
- Authority
- JP
- Japan
- Prior art keywords
- line
- pressure
- valve
- relief
- pressure compensation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/026—Pressure compensating valves
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
- F15B11/04—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed
- F15B11/05—Systems essentially incorporating special features for controlling the speed or actuating force of an output member for controlling the speed specially adapted to maintain constant speed, e.g. pressure-compensated, load-responsive
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
- F15B11/163—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load for sharing the pump output equally amongst users or groups of users, e.g. using anti-saturation, pressure compensation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
- F15B11/165—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load for adjusting the pump output or bypass in response to demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
- F15B2211/20553—Type of pump variable capacity with pilot circuit, e.g. for controlling a swash plate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/305—Directional control characterised by the type of valves
- F15B2211/30525—Directional control valves, e.g. 4/3-directional control valve
- F15B2211/3053—In combination with a pressure compensating valve
- F15B2211/30555—Inlet and outlet of the pressure compensating valve being connected to the directional control valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3105—Neutral or centre positions
- F15B2211/3111—Neutral or centre positions the pump port being closed in the centre position, e.g. so-called closed centre
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/605—Load sensing circuits
- F15B2211/6051—Load sensing circuits having valve means between output member and the load sensing circuit
- F15B2211/6052—Load sensing circuits having valve means between output member and the load sensing circuit using check valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/605—Load sensing circuits
- F15B2211/6051—Load sensing circuits having valve means between output member and the load sensing circuit
- F15B2211/6055—Load sensing circuits having valve means between output member and the load sensing circuit using pressure relief valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/605—Load sensing circuits
- F15B2211/6051—Load sensing circuits having valve means between output member and the load sensing circuit
- F15B2211/6057—Load sensing circuits having valve means between output member and the load sensing circuit using directional control valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/65—Methods of control of the load sensing pressure
- F15B2211/651—Methods of control of the load sensing pressure characterised by the way the load pressure is communicated to the load sensing circuit
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/65—Methods of control of the load sensing pressure
- F15B2211/654—Methods of control of the load sensing pressure the load sensing pressure being lower than the load pressure
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Fluid-Pressure Circuits (AREA)
Description
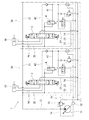
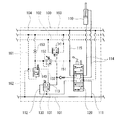
図2に、本発明の第1実施形態に係る圧力補償ユニット2Aを示し、図1にその圧力補償ユニット2Aが複数組み込まれた液圧回路1を示す。図1では、圧力補償ユニット2Aが2つのみ描かれているが、圧力補償ユニット2Aの数は3つ以上であってもよい。
次に、図3を参照して、本発明の第2実施形態に係る圧力補償ユニット2Bを説明する。なお、本実施形態において、第1実施形態と同一構成要素には同一符号を付し、重複した説明は省略する。
本発明は上述した第1および第2実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形が可能である。
2A,2B 圧力補償ユニット
3 制御弁
31 ポンプポート
32 中継ポート
33 給排ポート
34 タンクポート
4 圧力補償弁
41 上流側中継ライン
42 下流側中継ライン
43,44 パイロットライン
51 負荷圧検出ライン
61 逃しライン
62 リリーフ弁
63 絞り
7 切換弁
73 第1パイロットライン
74 第2パイロットライン
81 バイパスライン
82 バイパス弁
Claims (3)
- 複数のアクチュエータのうちの1つのアクチュエータに対する作動液の供給および排出を制御する制御弁であって、ポンプポート、一対の中継ポート、一対の給排ポートおよびタンクポートを有する制御弁と、
上流側中継ラインおよび下流側中継ラインにより前記一対の中継ポートと接続された、前記上流側中継ラインの圧力と信号圧との差圧に応じて作動する圧力補償弁と、
前記下流側中継ラインから分岐する負荷圧検出ラインと、
前記下流側中継ラインと接続された逃しラインであって、リリーフ弁が設けられた逃しラインと、
前記逃しラインに作動液が流れないときは前記信号圧として前記複数のアクチュエータの負荷圧のうちの最高負荷圧を前記圧力補償弁へ導き、前記逃しラインに作動液が流れるときは前記信号圧としてポンプ圧を前記圧力補償弁へ導くように構成された切換弁と、
を備える、圧力補償ユニット。
- 前記逃しラインには、前記リリーフ弁の上流側に絞りが設けられており、
前記切換弁は、第1パイロットラインにより前記下流側中継ラインと接続されているとともに、第2パイロットラインにより前記絞りと前記リリーフ弁の間で前記逃しラインに接続されている、請求項1に記載の圧力補償ユニット。 - 前記圧力補償弁へは、パイロットラインを通じて前記上流側中継ラインの圧力が導かれ、
前記パイロットラインと前記下流側中継ラインとを接続するバイパスラインと、
前記バイパスラインに設けられた、前記バイパスラインに流れる作動液の流量を一定に保つように構成されたバイパス弁と、をさらに備える、請求項1または2に記載の圧力補償ユニット。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015237392A JP6603560B2 (ja) | 2015-12-04 | 2015-12-04 | 圧力補償ユニット |
| CN201680070229.XA CN108291560B (zh) | 2015-12-04 | 2016-11-08 | 压力补偿单元 |
| PCT/JP2016/083083 WO2017094454A1 (ja) | 2015-12-04 | 2016-11-08 | 圧力補償ユニット |
| KR1020187017984A KR102023686B1 (ko) | 2015-12-04 | 2016-11-08 | 압력 보상 유닛 |
| US15/781,180 US10422110B2 (en) | 2015-12-04 | 2016-11-08 | Pressure compensation unit |
| DE112016005554.4T DE112016005554B4 (de) | 2015-12-04 | 2016-11-08 | Druckausgleichseinheit |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015237392A JP6603560B2 (ja) | 2015-12-04 | 2015-12-04 | 圧力補償ユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017101792A JP2017101792A (ja) | 2017-06-08 |
| JP6603560B2 true JP6603560B2 (ja) | 2019-11-06 |
Family
ID=58797064
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015237392A Active JP6603560B2 (ja) | 2015-12-04 | 2015-12-04 | 圧力補償ユニット |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10422110B2 (ja) |
| JP (1) | JP6603560B2 (ja) |
| KR (1) | KR102023686B1 (ja) |
| CN (1) | CN108291560B (ja) |
| DE (1) | DE112016005554B4 (ja) |
| WO (1) | WO2017094454A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10801525B2 (en) | 2018-01-12 | 2020-10-13 | Eaton Intelligent Power Limited | Hydraulic valve with pressure limiter function |
| JP7049213B2 (ja) * | 2018-08-10 | 2022-04-06 | 川崎重工業株式会社 | 建設機械の油圧回路 |
| JP7060112B2 (ja) * | 2018-11-14 | 2022-04-26 | 株式会社島津製作所 | 流体制御装置 |
| CN109630504B (zh) * | 2018-12-26 | 2021-01-26 | 太原理工大学 | 一种带压力补偿的进出油口独立控制系统 |
| JP7257181B2 (ja) * | 2019-02-25 | 2023-04-13 | ナブテスコ株式会社 | 駆動装置及び建設機械 |
| CN110118209B (zh) * | 2019-05-23 | 2023-10-20 | 福州大学 | 保证hb砼泵机稳定工作的换向控制回路系统 |
| CN112064714B (zh) * | 2020-08-26 | 2022-06-03 | 合肥工业大学 | 一种新型液压挖掘机流量控制系统 |
| US11608616B2 (en) * | 2020-09-30 | 2023-03-21 | Kubota Corporation | Hydraulic system for working machine |
| DE102021202207B4 (de) | 2021-03-08 | 2022-12-01 | Hawe Hydraulik Se | Vorwahlventil, Hydraulikventilverband und Hydrauliksteuervorrichtung |
| CN113464514B (zh) * | 2021-07-30 | 2023-06-02 | 湖南三一中型起重机械有限公司 | 集成式电控多路阀及起重机 |
| CN113775592B (zh) * | 2021-11-11 | 2022-01-07 | 太原理工大学 | 数字机械冗余压力补偿流量控制系统 |
| US12523014B2 (en) * | 2024-04-09 | 2026-01-13 | Cnh Industrial America Llc | System and method for controlling hydraulic fluid flow within a work vehicle |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6334308B1 (en) | 1998-03-04 | 2002-01-01 | Komatsu Ltd. | Pressure compensating valve, unloading pressure control valve and hydraulically operated device |
| EP1164297B1 (en) * | 2000-01-25 | 2005-08-31 | Hitachi Construction Machinery Co., Ltd. | Hydraulic driving device |
| WO2005047709A1 (ja) * | 2003-11-14 | 2005-05-26 | Komatsu Ltd. | 建設機械の油圧制御装置 |
| JP2007024103A (ja) * | 2005-07-13 | 2007-02-01 | Hitachi Constr Mach Co Ltd | 油圧駆動装置 |
| US7487707B2 (en) * | 2006-09-27 | 2009-02-10 | Husco International, Inc. | Hydraulic valve assembly with a pressure compensated directional spool valve and a regeneration shunt valve |
| US7854115B2 (en) * | 2008-04-25 | 2010-12-21 | Husco International, Inc. | Post-pressure compensated hydraulic control valve with load sense pressure limiting |
| US9003786B2 (en) * | 2011-05-10 | 2015-04-14 | Caterpillar Inc. | Pressure limiting in hydraulic systems |
| WO2012169676A1 (ko) * | 2011-06-09 | 2012-12-13 | 볼보 컨스트럭션 이큅먼트 에이비 | 건설기계용 유압시스템 |
| US9261115B2 (en) * | 2011-12-09 | 2016-02-16 | Toyota Jidosha Kabushiki Kaisha | Hydraulic control system |
| JP5860711B2 (ja) * | 2012-02-03 | 2016-02-16 | Kyb株式会社 | 流体圧制御装置 |
| CN204344992U (zh) * | 2014-10-17 | 2015-05-20 | 徐工集团工程机械股份有限公司 | 负载敏感多路阀、负载敏感系统及挖掘机 |
| CN107532618B (zh) * | 2015-12-10 | 2019-08-02 | 川崎重工业株式会社 | 油压驱动系统 |
-
2015
- 2015-12-04 JP JP2015237392A patent/JP6603560B2/ja active Active
-
2016
- 2016-11-08 US US15/781,180 patent/US10422110B2/en active Active
- 2016-11-08 KR KR1020187017984A patent/KR102023686B1/ko active Active
- 2016-11-08 DE DE112016005554.4T patent/DE112016005554B4/de active Active
- 2016-11-08 WO PCT/JP2016/083083 patent/WO2017094454A1/ja not_active Ceased
- 2016-11-08 CN CN201680070229.XA patent/CN108291560B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108291560A (zh) | 2018-07-17 |
| DE112016005554T5 (de) | 2018-08-09 |
| KR102023686B1 (ko) | 2019-09-23 |
| DE112016005554B4 (de) | 2021-10-21 |
| US10422110B2 (en) | 2019-09-24 |
| US20180347153A1 (en) | 2018-12-06 |
| JP2017101792A (ja) | 2017-06-08 |
| WO2017094454A1 (ja) | 2017-06-08 |
| KR20180099687A (ko) | 2018-09-05 |
| CN108291560B (zh) | 2019-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6603560B2 (ja) | 圧力補償ユニット | |
| US9550521B2 (en) | Hydraulic steering arrangement | |
| CN104132016B (zh) | 三通流量阀、负载敏感多路阀、液压系统和工程机械 | |
| JP2011256814A (ja) | 建設機械のポンプ吐出量制御回路 | |
| JP2013040641A (ja) | 油圧回路 | |
| JP2018135926A (ja) | 油圧システム | |
| US9835179B2 (en) | Hydraulic valve arrangement | |
| CN106715924A (zh) | 感载阀装置 | |
| CN105221399B (zh) | 带有故障安全功能的油压驱动系统 | |
| CN116771741B (zh) | 液压系统 | |
| KR100998614B1 (ko) | 건설장비용 유압 제어시스템 | |
| CN101016911A (zh) | 非负载敏感型流量自适应油源 | |
| JP7418278B2 (ja) | 油圧制御回路 | |
| JP4895595B2 (ja) | フォークリフト用制御回路 | |
| JP6541545B2 (ja) | ロードセンシング回路とそのバルブ構造 | |
| CN204921522U (zh) | 挖掘机减压节流系统 | |
| JP4791823B2 (ja) | ロードセンシング方式の油圧制御装置に用いられる油圧制御弁 | |
| JP4391930B2 (ja) | ロードセンシング回路 | |
| JP4839928B2 (ja) | 建設機械の油圧制御装置 | |
| JP4778721B2 (ja) | フォークリフト用制御回路 | |
| WO2019220565A1 (ja) | 油圧システム | |
| JP5984720B2 (ja) | アンロード弁装置 | |
| JP4962143B2 (ja) | 油圧駆動装置 | |
| WO2013042192A1 (ja) | 建設機械のポンプ吐出量制御回路 | |
| JP2006316937A (ja) | 作業車両の油圧回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190903 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191011 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6603560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |