JP6581973B2 - 針の挿入及び操縦のためのシステム - Google Patents
針の挿入及び操縦のためのシステム Download PDFInfo
- Publication number
- JP6581973B2 JP6581973B2 JP2016521283A JP2016521283A JP6581973B2 JP 6581973 B2 JP6581973 B2 JP 6581973B2 JP 2016521283 A JP2016521283 A JP 2016521283A JP 2016521283 A JP2016521283 A JP 2016521283A JP 6581973 B2 JP6581973 B2 JP 6581973B2
- Authority
- JP
- Japan
- Prior art keywords
- needle
- patient
- robot
- platform
- robot platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3405—Needle locating or guiding means using mechanical guide means
- A61B2017/3409—Needle locating or guiding means using mechanical guide means including needle or instrument drives
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/304—Surgical robots including a freely orientable platform, e.g. so called 'Stewart platforms'
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/374—NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
- A61B2090/3762—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy using computed tomography systems [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
Description
(i)優しい力を加えることによってロボット針マニピュレーターを患者の体表面に付けるため、及び、
(ii)リアルタイムでロボットの位置を追跡するため
の1つ以上であり得る。
(i)針に所望の姿勢を与える複数の自由度を有するロボットプラットフォームと、
(ii)ロボットプラットフォームに取り付けられたニードルグリッパーであって、針に対してその長手方向に運動を与えるように作動されるニードルグリッパーと
を含み、
前記ニードルグリッパーは針の基部に対して遠位で針の軸を把持するシステムが提供される。
(i)患者に針を位置合わせし且つ挿入するためのロボットプラットフォームと、
(ii)患者への針の挿入位置の近くでロボットプラットフォームを位置合わせするための支持アームと、
(iii)針の挿入位置の近くで患者の体の動きを検出するためのセンサーシステムと
を含み、
前記センサーシステムは、検出された患者の体の動きと協調した針の挿入のために、ロボットプラットフォームのためのコマンドを提供するシステムが更に提供される。
(i)針をその所望の姿勢に位置合わせするために複数の自由度を有するロボットのプラットフォームを設けることと、
(ii)ロボットプラットフォームに取り付けるためのニードルグリッパーを設けることと、
(iii)針の基部から遠位で針の軸を把持するのにニードルグリッパーを使用することと、
(iv)針に対してその長手方向に運動を与えるためにニードルグリッパーを作動させることと
を含む方法を行う。
(i)患者に挿入するために針を位置合わせするためのロボットプラットフォームを設けることと、
(ii)患者への針の挿入位置の近くでロボットプラットフォームを位置合わせするための支持アームを設けることと、
(iii)針の挿入位置の近くで患者の体の動きを検出することと、
(iv)検出された患者の体の動きと協調して針を挿入することができるように、ロボットプラットフォームのためのコマンドを提供するのに検出された体の動きを使用することと
を含むことができる。
Claims (15)
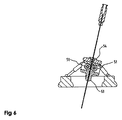
- 患者に針(31)を挿入するため及び前記患者の軟部組織内で前記針を操縦するためのシステムであって、
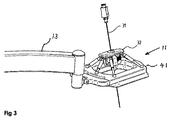
前記針に所望の姿勢を与える複数の自由度を有するロボットプラットフォーム(11)と、
前記ロボットプラットフォームに取り付けられるように且つ前記針の軸をその遠位端で把持するように構成されているニードルグリッパー(71)であって、前記針に対して前記針の長手方向に運動を与えるために作動されるように構成されているニードルグリッパーと
を含み、
前記針(31)が皮膚を貫通した後に患者の体内で動かされているときに前記患者の軟部組織内での前記針(31)の配向角を調整するべく前記ロボットプラットフォームが構成されるように、前記ロボットプラットフォーム(11)及び前記ニードルグリッパー(71)は協調して作動されるように構成され、
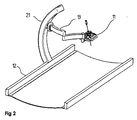
前記ロボットプラットフォーム(11)は、セミアクティブ支持アーム(13)を介してベース要素(12)に連結するように構成されている、システム。 - 前記ニードルグリッパー(71)は、ローラーの協調的な回転が前記針を前記長手方向に移動させるように、前記針(31)の両側に少なくとも1対のローラー(51)を含む、請求項1に記載のシステム。
- 前記針をその軸線回りに回転させるように構成されている針回転機構(54)を更に含む、請求項1又は2に記載のシステム。
- 前記ニードルグリッパー(71)は、前記針が長手方向に自由に移動することを可能にするために、前記針(31)に対するその把持の解除を可能にするように適合されている、請求項1から3のいずれか1項に記載のシステム。
- 前記ロボットプラットフォーム(11)は被作動プラットフォーム(32)とベースプレート(41)とを含み、前記ベースプレートは前記患者の皮膚に位置するように構成されている、請求項1から4のいずれか1項に記載のシステム。
- 前記ロボットプラットフォーム(11)は、パラレル、シリアル及びハイブリッドのロボットプラットフォームのいずれかである、請求項1から5のいずれか1項に記載のシステム。
- 前記セミアクティブ支持アーム(13)は、前記ロボットプラットフォームが前記患者の体と接触したままであるように前記ロボットプラットフォーム(11)に圧力をかけるように構成されている、請求項1から6のいずれか1項に記載のシステム。
- 前記セミアクティブ支持アーム(13)は、前記ロボットプラットフォーム(11)が前記患者の体の動きと共に自由に動くように、その動きが前記患者の体の表面に対して垂直な方向において実質的に拘束されないように構成されている、請求項1から7のいずれか1項に記載のシステム。
- 前記セミアクティブ支持アーム(13)は、前記ロボットプラットフォーム(11)を前記患者の体の所定の位置に拘束するように構成されている、請求項1から8のいずれか1項に記載のシステム。
- 前記患者の体の動きを検出するように構成されているセンサーシステムを更に含む、請求項1から9のいずれか1項に記載のシステム。
- 前記センサーシステムは、検出された前記患者の体の動きと協調した前記針の挿入のために、前記ロボットプラットフォームのためのコマンドを提供する、請求項10に記載のシステム。
- 前記患者の体の動きは呼吸に関連した動きである、請求項10又は11に記載のシステム。
- 前記セミアクティブ支持アーム(13)は、アーチ形支持アーム(21)を介して前記ベース要素(12)に連結されるように構成されている、請求項1から12のいずれか1項に記載のシステム。
- 前記ロボットプラットフォームは、前記針の前記所望の姿勢を達成するために前記被作動プラットフォーム(32)を前記ベースプレート(41)に対して適切に位置決め及び配向することによって前記針を空間内で位置決め及び配向するように適合されている、請求項5に記載のシステム。
- 前記ロボットプラットフォーム(11)の前記複数の自由度及び前記針(31)の軸のその遠位端における前記把持は、前記システムの作業空間が平坦又は平面的であり且つ前記針(31)の長さに依存しないようなものである、請求項1から14のいずれか1項に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361887654P | 2013-10-07 | 2013-10-07 | |
| US61/887,654 | 2013-10-07 | ||
| PCT/IL2014/050891 WO2015052719A1 (en) | 2013-10-07 | 2014-10-07 | Needle steering by shaft manipulation |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016536047A JP2016536047A (ja) | 2016-11-24 |
| JP2016536047A5 JP2016536047A5 (ja) | 2017-11-16 |
| JP6581973B2 true JP6581973B2 (ja) | 2019-09-25 |
Family
ID=52812585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016521283A Active JP6581973B2 (ja) | 2013-10-07 | 2014-10-07 | 針の挿入及び操縦のためのシステム |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US10507067B2 (ja) |
| EP (1) | EP3054868B1 (ja) |
| JP (1) | JP6581973B2 (ja) |
| CN (1) | CN105813585B (ja) |
| CA (1) | CA2926621C (ja) |
| IL (1) | IL244999A0 (ja) |
| WO (1) | WO2015052719A1 (ja) |
Families Citing this family (143)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| WO2012131660A1 (en) | 2011-04-01 | 2012-10-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system for spinal and other surgeries |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US10842461B2 (en) | 2012-06-21 | 2020-11-24 | Globus Medical, Inc. | Systems and methods of checking registrations for surgical systems |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US10646280B2 (en) | 2012-06-21 | 2020-05-12 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US11589771B2 (en) | 2012-06-21 | 2023-02-28 | Globus Medical Inc. | Method for recording probe movement and determining an extent of matter removed |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11963755B2 (en) | 2012-06-21 | 2024-04-23 | Globus Medical Inc. | Apparatus for recording probe movement |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| US11896446B2 (en) | 2012-06-21 | 2024-02-13 | Globus Medical, Inc | Surgical robotic automation with tracking markers |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| WO2013192598A1 (en) | 2012-06-21 | 2013-12-27 | Excelsius Surgical, L.L.C. | Surgical robot platform |
| US11786324B2 (en) | 2012-06-21 | 2023-10-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US10799298B2 (en) | 2012-06-21 | 2020-10-13 | Globus Medical Inc. | Robotic fluoroscopic navigation |
| US10874466B2 (en) | 2012-06-21 | 2020-12-29 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| WO2015052718A1 (en) | 2013-10-07 | 2015-04-16 | Technion Research & Development Foundation Ltd. | Gripper for robotic image guided needle insertion |
| WO2015107099A1 (en) | 2014-01-15 | 2015-07-23 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| EP3104803B1 (en) | 2014-02-11 | 2021-09-15 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| CN106659537B (zh) | 2014-04-24 | 2019-06-11 | Kb医疗公司 | 结合机器人手术系统使用的手术器械固持器 |
| US10828120B2 (en) | 2014-06-19 | 2020-11-10 | Kb Medical, Sa | Systems and methods for performing minimally invasive surgery |
| CN107072673A (zh) | 2014-07-14 | 2017-08-18 | Kb医疗公司 | 用于在骨组织中制备孔的防滑手术器械 |
| US10765438B2 (en) | 2014-07-14 | 2020-09-08 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| JP6803830B2 (ja) | 2014-08-07 | 2020-12-23 | イマジナリス エス.アール.エル. | 改善された操作性を有するx線撮像デバイス |
| CN113017799A (zh) | 2014-11-29 | 2021-06-25 | 赞克特机器人有限公司 | 插入导引件 |
| US11103316B2 (en) | 2014-12-02 | 2021-08-31 | Globus Medical Inc. | Robot assisted volume removal during surgery |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| US10555782B2 (en) | 2015-02-18 | 2020-02-11 | Globus Medical, Inc. | Systems and methods for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| GB2551937B (en) * | 2015-03-26 | 2020-09-02 | Gyrus Acmi Inc | Biopsy sample retention mechanism |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| EP3344179B1 (en) | 2015-08-31 | 2021-06-30 | KB Medical SA | Robotic surgical systems |
| CA2998298A1 (en) | 2015-09-10 | 2017-03-16 | Xact Robotics Ltd. | Systems and methods for guiding the insertion of a medical tool |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| JP6906239B2 (ja) | 2015-12-28 | 2021-07-21 | ザクト ロボティクス リミテッド | 調節可能レジストレーションフレーム |
| CN105832385A (zh) * | 2016-01-07 | 2016-08-10 | 孙龙 | 一种穿刺针的术中滑动定位支撑机构 |
| EP3410941B1 (en) | 2016-02-01 | 2021-12-29 | Imaginalis S.r.l. | Radiological imaging device |
| ITUB20160102A1 (it) * | 2016-02-01 | 2017-08-01 | Imaginalis S R L | Dispositivo di imaging radiologico |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| WO2017179044A1 (en) | 2016-04-15 | 2017-10-19 | Xact Robotics Ltd. | Devices and methods for attaching a medical device to a subject |
| WO2017198313A1 (en) * | 2016-05-20 | 2017-11-23 | Brainlab Ag | Tracking reference fixation support |
| JP7131834B2 (ja) | 2016-05-25 | 2022-09-06 | ザクト ロボティクス リミテッド | 自動挿入装置 |
| US11039893B2 (en) | 2016-10-21 | 2021-06-22 | Globus Medical, Inc. | Robotic surgical systems |
| CN106344160B (zh) * | 2016-11-03 | 2019-09-20 | 河北工业大学 | 一种含有弧形移动副的外科手术机器人 |
| EP3360502A3 (en) | 2017-01-18 | 2018-10-31 | KB Medical SA | Robotic navigation of robotic surgical systems |
| JP2018114280A (ja) | 2017-01-18 | 2018-07-26 | ケービー メディカル エスアー | ロボット外科用システムのための汎用器具ガイド、外科用器具システム、及びそれらの使用方法 |
| EP3351202B1 (en) | 2017-01-18 | 2021-09-08 | KB Medical SA | Universal instrument guide for robotic surgical systems |
| DE102017201440B3 (de) | 2017-01-30 | 2018-05-30 | Fresenius Medical Care Deutschland Gmbh | Kanülierautomat zur Erkennung und Manipulation eines Blutgefäßes, sowie entsprechendes Verfahren |
| DE102017201437A1 (de) | 2017-01-30 | 2018-08-02 | Fresenius Medical Care Deutschland Gmbh | System und Verfahren zur automatisierten Kanülierung |
| DE102017201441A1 (de) | 2017-01-30 | 2018-08-02 | Fresenius Medical Care Deutschland Gmbh | Desinfektionsautomat zur Desinfektion der Haut und Verfahren |
| DE102017201434A1 (de) | 2017-01-30 | 2018-08-02 | Fresenius Medical Care Deutschland Gmbh | Kanülierautomat |
| DE102017201451A1 (de) | 2017-01-30 | 2018-08-02 | Fresenius Medical Care Deutschland Gmbh | Greifervorrichtung für Kanülen |
| DE102017201447A1 (de) | 2017-01-30 | 2018-08-02 | Fresenius Medical Care Deutschland Gmbh | Vorrichtung und Verfahren zum Herstellen und/oder Lösen einer mit einem Fluid durchströmbaren, medizinischen Gewindeverbindung |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| IT201700042542A1 (it) * | 2017-04-18 | 2018-10-18 | Imaginalis S R L | Braccio robotico medicale |
| US10842514B2 (en) | 2017-06-21 | 2020-11-24 | Boston Scientific Limited | Surgical guidance systems, devices, and methods |
| US11135015B2 (en) | 2017-07-21 | 2021-10-05 | Globus Medical, Inc. | Robot surgical platform |
| US10898252B2 (en) | 2017-11-09 | 2021-01-26 | Globus Medical, Inc. | Surgical robotic systems for bending surgical rods, and related methods and devices |
| US11382666B2 (en) | 2017-11-09 | 2022-07-12 | Globus Medical Inc. | Methods providing bend plans for surgical rods and related controllers and computer program products |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| CN111712211B (zh) * | 2018-01-29 | 2023-05-30 | 香港大学 | 用于mri引导的神经外科手术的机器人立体定向系统 |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| CN109091245B (zh) * | 2018-07-05 | 2020-06-02 | 赵楠 | 一种医学麻醉科用麻醉支架 |
| WO2020020432A1 (en) * | 2018-07-23 | 2020-01-30 | Brainlab Ag | Articulated robotic platform |
| EP3628225B1 (de) | 2018-09-26 | 2021-03-31 | Siemens Healthcare GmbH | Verfahren zur aufnahme von bilddaten und medizinisches bildgebungssystem |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| SG10201900302SA (en) * | 2019-01-11 | 2020-08-28 | Biobot Surgical Pte Ltd | A needle guide assembly and method of operating the same |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| RU2715684C1 (ru) * | 2019-03-27 | 2020-03-02 | Общество с ограниченной ответственностью "МРОБОТИКС" (ООО "МРОБОТИКС") | Автономный мобильный модуль роботизированного хирургического инструмента |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| CN110025869B (zh) * | 2019-05-28 | 2021-03-19 | 丛静 | 一种多功能麻醉科辅助麻醉装置 |
| EP3753520A1 (de) * | 2019-06-19 | 2020-12-23 | Karl Storz SE & Co. KG | Medizinische handhabungsvorrichtung zur steuerung einer handhabungsvorrichtung |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| CA3163081A1 (en) | 2019-11-27 | 2021-06-03 | Xact Robotics Ltd. | Planning and real-time updating a 3d trajectory of a medical instrument |
| EP4065030A4 (en) | 2019-11-30 | 2023-04-05 | Xact Robotics Ltd. | ADJUSTABLE COVER FOR AUTOMATED MEDICAL DEVICE |
| CN111227943B (zh) * | 2020-01-23 | 2021-07-06 | 诺创智能医疗科技(杭州)有限公司 | 手术机械臂的控制方法、计算机设备及一种手术机械臂 |
| US11464581B2 (en) | 2020-01-28 | 2022-10-11 | Globus Medical, Inc. | Pose measurement chaining for extended reality surgical navigation in visible and near infrared spectrums |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| EP3871700A1 (en) | 2020-02-26 | 2021-09-01 | Fresenius Medical Care Deutschland GmbH | Disinfection system measuring temperature |
| DE102020110112A1 (de) | 2020-04-10 | 2021-10-14 | Fresenius Medical Care Deutschland Gmbh | Medizinisches Set für Kanülierung |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US20230149112A1 (en) * | 2020-04-29 | 2023-05-18 | Medtronic Navigation, Inc. | System and method for a navigated procedure |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| DE102020114502A1 (de) | 2020-05-29 | 2021-12-02 | Fresenius Medical Care Deutschland Gmbh | Medizinisches Set zum Überwachen eines Patienten mittels Radarwellen |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| US11529738B2 (en) * | 2020-07-02 | 2022-12-20 | NDR Medical Technology Pte. Ltd. | Control system and a method for operating a robot |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| CN112353461A (zh) * | 2020-10-08 | 2021-02-12 | 王洪奎 | Ct实时定位精准穿刺机器人 |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| AU2021376224A1 (en) * | 2020-11-06 | 2023-06-22 | Stryker Corporation | Robotic hand-held surgical instrument systems and methods |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| NL2028425B1 (en) * | 2021-06-10 | 2022-12-20 | Nemo Creativity Holding B V | In-bore positioning system |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| US11918304B2 (en) | 2021-12-20 | 2024-03-05 | Globus Medical, Inc | Flat panel registration fixture and method of using same |
| WO2023137155A2 (en) * | 2022-01-13 | 2023-07-20 | Georgia Tech Research Corporation | Image-guided robotic system and method with step-wise needle insertion |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| AU6534098A (en) | 1997-02-20 | 1998-09-09 | Johns Hopkins University, The | Friction transmission with axial loading and a radiolucent surgical needle driver |
| JP4180689B2 (ja) * | 1997-07-24 | 2008-11-12 | 株式会社半導体エネルギー研究所 | 半導体装置の作製方法 |
| US8004229B2 (en) * | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US7175635B2 (en) * | 2000-03-30 | 2007-02-13 | Siemens Aktiengesellschaft | Medical device with a drive unit for a needle |
| EP1450683A4 (en) | 2001-11-08 | 2009-11-11 | Univ Johns Hopkins Med | SYSTEM AND METHOD FOR ROBOT TARGETING BY FLUOROSCOPY BASED ON IMAGE ENHANCEMENT |
| US20050267359A1 (en) * | 2004-05-27 | 2005-12-01 | General Electric Company | System, method, and article of manufacture for guiding an end effector to a target position within a person |
| WO2006081409A2 (en) | 2005-01-28 | 2006-08-03 | Massachusetts General Hospital | Guidance and insertion system |
| FR2882514B1 (fr) | 2005-02-28 | 2008-02-15 | Inst Nat Sciences Appliq | Dispositif de maintien et de deplacement controle en translation d'un corps allonge |
| US7822458B2 (en) | 2005-05-19 | 2010-10-26 | The Johns Hopkins University | Distal bevel-tip needle control device and algorithm |
| WO2007141784A2 (en) | 2006-06-05 | 2007-12-13 | Technion Research & Development Foundation Ltd. | Controlled steering of a flexible needle |
| DE102008022924A1 (de) | 2008-05-09 | 2009-11-12 | Siemens Aktiengesellschaft | Vorrichtung und Verfahren für einen medizinischen Eingriff |
| US20100023485A1 (en) * | 2008-07-25 | 2010-01-28 | Hung-Yi Cheng Chu | Method of generating audiovisual content through meta-data analysis |
| US9610131B2 (en) * | 2008-11-05 | 2017-04-04 | The Johns Hopkins University | Rotating needle driver and apparatuses and methods related thereto |
| EP2561821A1 (en) | 2011-08-25 | 2013-02-27 | Perfint Healthcare Private Limited | Tool positioning system |
-
2014
- 2014-10-07 US US15/027,438 patent/US10507067B2/en active Active
- 2014-10-07 CN CN201480066546.5A patent/CN105813585B/zh active Active
- 2014-10-07 CA CA2926621A patent/CA2926621C/en active Active
- 2014-10-07 JP JP2016521283A patent/JP6581973B2/ja active Active
- 2014-10-07 EP EP14852135.4A patent/EP3054868B1/en active Active
- 2014-10-07 WO PCT/IL2014/050891 patent/WO2015052719A1/en active Application Filing
-
2016
- 2016-04-07 IL IL244999A patent/IL244999A0/en active IP Right Grant
-
2019
- 2019-12-16 US US16/714,840 patent/US11369444B2/en active Active
-
2022
- 2022-05-24 US US17/751,993 patent/US20220280251A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US10507067B2 (en) | 2019-12-17 |
| JP2016536047A (ja) | 2016-11-24 |
| EP3054868A4 (en) | 2017-05-17 |
| IL244999A0 (en) | 2016-05-31 |
| EP3054868A1 (en) | 2016-08-17 |
| CN105813585A (zh) | 2016-07-27 |
| CN105813585B (zh) | 2020-01-10 |
| EP3054868B1 (en) | 2019-10-02 |
| US20200179066A1 (en) | 2020-06-11 |
| CA2926621C (en) | 2021-05-25 |
| CA2926621A1 (en) | 2015-04-16 |
| US20160249990A1 (en) | 2016-09-01 |
| US20220280251A1 (en) | 2022-09-08 |
| US11369444B2 (en) | 2022-06-28 |
| WO2015052719A1 (en) | 2015-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6581973B2 (ja) | 針の挿入及び操縦のためのシステム | |
| US11344377B2 (en) | Systems and methods for aligning an elongate member with an access site | |
| US11751956B2 (en) | Automated insertion device | |
| ES2344146T3 (es) | Cateter guiado roboticamente. | |
| KR20210137508A (ko) | 의료 시스템 및 응용을 위한 틸트 메커니즘 | |
| KR20210073542A (ko) | 의료 기구를 도킹시키기 위한 시스템 및 방법 | |
| EP3989841A1 (en) | Systems and methods for robotic arm alignment and docking | |
| CN101991901A (zh) | 用于导管的机器人驱动器 | |
| EP3797670B1 (en) | Endoscopic capsule system with haptic feedback | |
| US20230000572A1 (en) | Surgical system and method of controlling surgical manipulator arm | |
| US20210299862A1 (en) | Systems and methods for constrained motion control of medical instruments | |
| US20200107895A1 (en) | Surgical system and patient-side apparatus | |
| US20230011181A1 (en) | Self-aligned docking for a robotic surgical platform | |
| KR20230074803A (ko) | 수술 테이블을 위한 동력 보조식 이동성 | |
| JP2023001158A (ja) | 医師側操作装置および手術システム | |
| EP4125670A1 (en) | Hand-manipulated input device for robotic system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171004 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171004 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181005 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190723 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190902 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6581973 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |