JP6570894B2 - 温度制御方法 - Google Patents
温度制御方法 Download PDFInfo
- Publication number
- JP6570894B2 JP6570894B2 JP2015126769A JP2015126769A JP6570894B2 JP 6570894 B2 JP6570894 B2 JP 6570894B2 JP 2015126769 A JP2015126769 A JP 2015126769A JP 2015126769 A JP2015126769 A JP 2015126769A JP 6570894 B2 JP6570894 B2 JP 6570894B2
- Authority
- JP
- Japan
- Prior art keywords
- temperature
- mounting table
- heat transfer
- heater
- electrostatic chuck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having at least one potential-jump barrier or surface barrier, e.g. PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having at least one potential-jump barrier or surface barrier, e.g. PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic System or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/324—Thermal treatment for modifying the properties of semiconductor bodies, e.g. annealing, sintering
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/404—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by control arrangements for compensation, e.g. for backlash, overshoot, tool offset, tool wear, temperature, machine construction errors, load, inertia
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67098—Apparatus for thermal treatment
- H01L21/67109—Apparatus for thermal treatment mainly by convection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67248—Temperature monitoring
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6831—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using electrostatic chucks
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/6835—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using temporarily an auxiliary support
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45031—Manufacturing semiconductor wafers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/49—Nc machine tool, till multiple
- G05B2219/49057—Controlling temperature of workpiece, tool, probe holder
Description
図1は、処理システム10の一例を示す図である。処理システム10は、例えば図1に示すように、処理装置100および制御装置200を備える。処理装置100は、被処理体の一例である半導体ウエハWに対して、プラズマエッチング、プラズマCVD(Chemical Vapor Deposition)、または熱処理等の所定の処理を行う。制御装置200は、処理装置100に設けられた温度センサ等の各種センサからの情報に基づいて処理装置100を制御し、処理装置100内に搬入された半導体ウエハWに対して処理装置100に所定の処理を実行させる。
図2は、処理装置100の一例を示す断面図である。処理装置100は、例えば図2に示すように、気密に構成された処理チャンバ1を有する。処理チャンバ1は、例えば表面に陽極酸化被膜が施されたアルミニウム等により、略円筒状に形成され、接地されている。処理チャンバ1内には、半導体ウエハWを水平に支持する載置台2が設けられている。
図3は、静電チャック6の上面の一例を示す図である。図4は、図3のA−A断面の一例を示す図である。静電チャック6の外周には、静電チャック6を囲むようにフォーカスリング5が設けられている。半導体ウエハWが載置される静電チャック6の上面は、例えば同心円状に複数の分割領域に分けられている。本実施例において、静電チャック6の上面は、例えば2つの分割領域60aおよび60bに分けられている。なお、以下では、分割領域60aをセンタ領域、分割領域60bをエッヂ領域と呼ぶ場合がある。また、以下では、複数の分割領域60aおよび60bのそれぞれを区別することなく総称する場合に分割領域60と記載する。
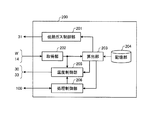
図5は、制御装置200の一例を示すブロック図である。制御装置200は、例えば図5に示すように、伝熱ガス制御部201、取得部202、算出部203、記憶部204、温度制御部205、および処理制御部206を有する。
図7は、補正テーブル2040の作成時における温度測定用ウエハW’および静電チャック6の温度変化の一例を示す図である。図7は、静電チャック6上の一つの分割領域(例えばセンタ領域)に対応する領域の温度測定用ウエハW’および静電チャック6の温度変化の一例を示している。また、以下では、補正テーブル2040のうち、一つの分割領域60における個別テーブル2041の作成処理について説明する。なお、他の分割領域60における個別テーブル2041の作成処理についても同様であるため、他の分割領域60における個別テーブル2041の作成処理については説明を省略する。
Toff=Tr−Tm ・・・(1)
ここで、Tmは、プラズマ生成中の温度測定用ウエハW’の温度を示し、Trは、基準となる温度を示す。
図10は、補正値が適用された場合の温度測定用ウエハW’および静電チャック6の温度変化の一例を示す図である。図10は、静電チャック6上の一つの分割領域(例えばセンタ領域)における温度測定用ウエハW’および静電チャック6の温度変化の一例を示している。また、図10(a)は伝熱ガスの圧力が5Torrの場合、図10(b)は伝熱ガスの圧力が10Torrの場合、図10(c)は伝熱ガスの圧力が20Torrの場合の温度測定用ウエハW’および静電チャックの温度変化の一例をそれぞれ示している。図10において、グラフ80は温度測定用ウエハW’の温度変化を示し、グラフ81は静電チャック6の温度変化を示している。
図11は、実施例1における補正テーブル作成処理の一例を示すフローチャートである。なお、図11に示した処理に先立って、ヒータ電源30は、ヒータ6cへの電力供給を停止あるいは固定しており、静電チャック6は、基材2a内を流通する冷媒により所定温度まで冷却されている。また、温度測定用ウエハW’の温度は室温である。
図12は、実施例1における半導体ウエハWに対する処理の一例を示すフローチャートである。なお、図12に示した処理に先立って、ヒータ電源30は、ヒータ6cへの電力供給を停止あるいは固定しており、静電チャック6は、基材2a内を流通する冷媒により所定温度まで冷却されている。また、半導体ウエハWの温度は室温である。
図14は、実施例2における補正テーブル2043の作成処理の一例を示すフローチャートである。なお、以下に説明する点を除き、図11を用いて説明した補正テーブル2043の作成処理と同様の処理については、同一の符号を付して説明を省略する。
図16は、実施例2における半導体ウエハWに対する処理の一例を示すフローチャートである。なお、以下に説明する点を除き、図12を用いて説明した半導体ウエハWに対する処理と同様の処理については、同一の符号を付して説明を省略する。
なお、上記した各実施例における制御装置200は、例えば図17に示すようなコンピュータ90によって実現される。図17は、制御装置200の機能を実現するコンピュータ90の一例を示す図である。コンピュータ90は、CPU(Central Processing Unit)91、RAM(Random Access Memory)92、ROM(Read Only Memory)93、補助記憶装置94、無線通信機95、通信インターフェイス(I/F)96、入出力インターフェイス(I/F)97、およびメディアインターフェイス(I/F)98を備える。
W’ 温度測定用ウエハ
10 処理システム
100 処理装置
200 制御装置
1 処理チャンバ
2 載置台
2a 基材
2b 流路
6 静電チャック
6a 電極
6b 絶縁体
6c ヒータ
13 直流電源
14 温度測定装置
16 シャワーヘッド
20 温度センサ
22 感温体
23 読取部
201 伝熱ガス制御部
202 取得部
203 算出部
204 記憶部
205 温度制御部
206 処理制御部
30 ヒータ電源
31 伝熱ガス供給部
33 チラーユニット
60 分割領域
Claims (14)
- 載置台の載置面に載置された被処理体の温度を制御する温度制御方法において、
前記載置台を加熱するヒータへの電力供給が停止された状態、あるいはヒータへ供給される電力が固定された状態で、前記載置台の温度とは異なる温度の前記被処理体が載置された前記載置台と前記被処理体との間に伝熱ガスを供給する供給工程と、
前記伝熱ガスを介した前記被処理体と前記載置台との熱交換による前記載置台の温度変化を測定する第1の測定工程と、
前記載置台の温度変化に基づいて補正値を算出する算出工程と、
予め設定された処理レシピにおいて指定された目標温度を、前記補正値によって補正する補正工程と、
前記ヒータへの電力供給を開始し、前記載置台の温度が前記補正値によって補正された目標温度となるように、前記ヒータの電力を制御する制御工程と
を含むことを特徴とする温度制御方法。 - 前記第1の測定工程では、
前記載置台と前記被処理体との間に伝熱ガスが供給されてから第1の時間が経過した第1の時点と、前記第1の時点から第2の時間が経過した第2の時点との間の前記載置台の温度変化の傾きを、前記載置台の温度変化として測定することを特徴とする請求項1に記載の温度制御方法。 - 前記載置台を加熱するヒータへの電力供給が停止された状態、あるいはヒータへ供給される電力が固定された状態で、前記載置台の温度とは異なる温度の温度測定用ウエハが載置された前記載置台と前記温度測定用ウエハとの間に前記伝熱ガスを供給し、前記伝熱ガスを介した前記温度測定用ウエハと前記載置台との熱交換による前記載置台の温度変化を測定した後に、前記載置台の温度が所定の温度となるように前記ヒータの電力を制御して前記温度測定用ウエハの温度を測定する第2の測定工程と、
異なる圧力の前記伝熱ガス毎に、前記第2の測定工程において測定された前記載置台の温度変化に、前記第2の測定工程において測定された前記温度測定用ウエハの温度と基準となる温度との差分に応じた前記補正値を対応付けて補正テーブルを作成する作成工程と
をさらに含み、
前記算出工程では、
前記補正テーブルに基づいて、前記載置台の温度変化に基づく前記補正値を算出することを特徴とする請求項2に記載の温度制御方法。 - 前記供給工程、前記第1の測定工程、前記算出工程、および前記制御工程は、
前記被処理体毎に、前記被処理体に対する処理の実行前に行われることを特徴とする請求項1から3のいずれか一項に記載の温度制御方法。 - 前記伝熱ガスは、前記載置台の載置面に形成された複数の供給口から前記載置台と前記被処理体との間に供給されることを特徴とする請求項1から4のいずれか一項に記載の温度制御方法。
- 前記ヒータは、
前記載置台の上方から見た場合に、前記載置台の内部に、半径の異なる同心円状に複数設けられることを特徴とする請求項1から5のいずれか一項に記載の温度制御方法。 - 前記算出工程では、
それぞれの前記ヒータについて、前記載置台の温度変化に基づく前記補正値を算出し、
前記制御工程では、
それぞれの前記ヒータについて、前記載置台の温度が前記補正値によって補正された目標温度となるように、前記ヒータの電力を制御することを特徴とする請求項6に記載の温度制御方法。 - 載置台の載置面に載置された被処理体の温度を制御する温度制御方法において、
前記載置台を加熱するヒータへの電力供給が停止された状態、あるいはヒータへ供給される電力が固定された状態で、前記載置台の温度とは異なる温度の前記被処理体が載置された前記載置台と前記被処理体との間に第1の圧力の伝熱ガスを供給する供給工程と、
前記伝熱ガスを介した前記被処理体と前記載置台との熱交換による前記載置台の温度変化を測定する第1の測定工程と、
前記載置台の温度変化に基づいて前記伝熱ガスの第2の圧力を算出する第1の算出工程と、
前記ヒータへの電力供給を開始すると共に、前記載置台と前記被処理体との間に供給する前記伝熱ガスの圧力を前記第2の圧力に設定し、前記載置台の温度が予め設定された処理レシピにおいて指定された目標温度となるように、前記ヒータの電力を制御する制御工程と
を含むことを特徴とする温度制御方法。 - 前記第1の測定工程では、
前記載置台と前記被処理体との間に伝熱ガスが供給されてから第1の時間が経過した第1の時点と、前記第1の時点から第2の時間が経過した第2の時点との間の前記載置台の温度変化の傾きを、前記載置台の温度変化として測定することを特徴とする請求項8に記載の温度制御方法。 - 前記載置台を加熱するヒータへの電力供給が停止された状態、あるいはヒータへ供給される電力が固定された状態で、前記載置台の温度とは異なる温度の温度測定用ウエハが載置された前記載置台と前記温度測定用ウエハとの間に前記伝熱ガスを供給し、前記伝熱ガスを介した前記温度測定用ウエハと前記載置台との熱交換による前記載置台の温度変化を測定した後に、前記載置台の温度が所定の温度となるように前記ヒータの電力を制御して前記温度測定用ウエハの温度を測定する第2の測定工程と、
異なる圧力の前記伝熱ガス毎に、前記第2の測定工程において測定された前記載置台の温度変化の傾きに基づいて前記伝熱ガスの圧力と前記温度変化の傾きの値との関係を示す関係式を算出する第2の算出工程と、
前記第2の測定工程において測定された前記温度測定用ウエハの温度が基準温度となる場合の前記載置台の温度変化の傾きの値を目標となる温度変化の傾きの値として算出する第3の算出工程と
をさらに含み、
前記第1の算出工程では、
前記第2の算出工程において算出された前記関係式と、前記第3の算出工程において算出された前記目標となる温度変化の傾きの値とに基づいて、前記第2の圧力を算出することを特徴とする請求項9に記載の温度制御方法。 - 前記供給工程、前記第1の測定工程、前記第1の算出工程、および前記制御工程は、
前記被処理体毎に、前記被処理体に対する処理の実行前に行われることを特徴とする請求項8から10のいずれか一項に記載の温度制御方法。 - 前記伝熱ガスは、前記載置台の載置面に形成された複数の供給口から供給されることを特徴とする請求項8から11のいずれか一項に記載の温度制御方法。
- 前記ヒータは、
前記載置台の上方から見た場合に、前記載置台の内部に、半径の異なる同心円状に複数設けられることを特徴とする請求項8から12のいずれか一項に記載の温度制御方法。 - 前記伝熱ガスの圧力は、前記ヒータが配置された前記載置面の領域毎に独立して制御可能であることを特徴とする請求項13に記載の温度制御方法。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015126769A JP6570894B2 (ja) | 2015-06-24 | 2015-06-24 | 温度制御方法 |
| KR1020160077382A KR102299595B1 (ko) | 2015-06-24 | 2016-06-21 | 온도 제어 방법 |
| TW105119501A TWI736537B (zh) | 2015-06-24 | 2016-06-22 | 溫度控制方法 |
| US15/189,195 US10921773B2 (en) | 2015-06-24 | 2016-06-22 | Temperature control method |
| CN201610475906.8A CN106298447B (zh) | 2015-06-24 | 2016-06-24 | 温度控制方法 |
| US17/149,820 US20210132575A1 (en) | 2015-06-24 | 2021-01-15 | Temperature control method |
| US18/532,330 US20240103482A1 (en) | 2015-06-24 | 2023-12-07 | Temperature control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015126769A JP6570894B2 (ja) | 2015-06-24 | 2015-06-24 | 温度制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017011169A JP2017011169A (ja) | 2017-01-12 |
| JP6570894B2 true JP6570894B2 (ja) | 2019-09-04 |
Family
ID=57602213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015126769A Active JP6570894B2 (ja) | 2015-06-24 | 2015-06-24 | 温度制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US10921773B2 (ja) |
| JP (1) | JP6570894B2 (ja) |
| KR (1) | KR102299595B1 (ja) |
| CN (1) | CN106298447B (ja) |
| TW (1) | TWI736537B (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6554387B2 (ja) * | 2015-10-26 | 2019-07-31 | 東京エレクトロン株式会社 | ロードロック装置における基板冷却方法、基板搬送方法、およびロードロック装置 |
| US20180235110A1 (en) * | 2017-02-16 | 2018-08-16 | Lam Research Corporation | Cooling system for rf power electronics |
| JP6918554B2 (ja) * | 2017-04-06 | 2021-08-11 | 東京エレクトロン株式会社 | 可動体構造及び成膜装置 |
| JP2018206847A (ja) * | 2017-05-31 | 2018-12-27 | 株式会社Kokusai Electric | 半導体装置の製造方法、プログラムおよび基板処理装置 |
| JP7068971B2 (ja) * | 2017-11-16 | 2022-05-17 | 東京エレクトロン株式会社 | プラズマ処理装置、温度制御方法および温度制御プログラム |
| TWI829367B (zh) * | 2017-11-16 | 2024-01-11 | 日商東京威力科創股份有限公司 | 電漿處理裝置、溫度控制方法及溫度控制程式 |
| JP7101023B2 (ja) * | 2018-04-03 | 2022-07-14 | 東京エレクトロン株式会社 | 温調方法 |
| JP7195060B2 (ja) * | 2018-05-17 | 2022-12-23 | 東京エレクトロン株式会社 | 基板処理方法及び基板処理装置 |
| JP6971199B2 (ja) * | 2018-05-31 | 2021-11-24 | 東京エレクトロン株式会社 | 基板処理方法および基板処理装置 |
| JP7202972B2 (ja) * | 2018-06-29 | 2023-01-12 | 東京エレクトロン株式会社 | プラズマ処理装置、プラズマ状態検出方法およびプラズマ状態検出プログラム |
| JP7094804B2 (ja) * | 2018-07-03 | 2022-07-04 | 東京エレクトロン株式会社 | 基板処理装置および基板処理方法 |
| US11087962B2 (en) * | 2018-07-20 | 2021-08-10 | Lam Research Corporation | Real-time control of temperature in a plasma chamber |
| CN111009454A (zh) * | 2018-10-05 | 2020-04-14 | 东京毅力科创株式会社 | 等离子体处理装置、监视方法以及记录介质 |
| US11532461B2 (en) * | 2018-10-23 | 2022-12-20 | Tokyo Electron Limited | Substrate processing apparatus |
| CN109556943B (zh) * | 2018-11-27 | 2021-02-05 | 迈克医疗电子有限公司 | 恒温系统的温度修正方法、装置、分析仪器、存储介质 |
| US11488808B2 (en) * | 2018-11-30 | 2022-11-01 | Tokyo Electron Limited | Plasma processing apparatus, calculation method, and calculation program |
| JP7304188B2 (ja) * | 2019-03-29 | 2023-07-06 | 東京エレクトロン株式会社 | 基板処理方法及び基板処理装置 |
| JP7214562B2 (ja) * | 2019-05-13 | 2023-01-30 | 東京エレクトロン株式会社 | プラズマ処理装置、算出方法および算出プログラム |
| JP7244348B2 (ja) * | 2019-05-13 | 2023-03-22 | 東京エレクトロン株式会社 | プラズマ処理装置、温度制御方法および温度制御プログラム |
| US20220068602A1 (en) * | 2020-09-03 | 2022-03-03 | Tokyo Electron Limited | Temperature estimation apparatus, plasma processing system, temperature estimation method and temperature estimation program |
| KR102520584B1 (ko) * | 2020-10-14 | 2023-04-10 | 세메스 주식회사 | 공정 계측 장치 및 방법 |
| JP2022073471A (ja) | 2020-11-02 | 2022-05-17 | 東京エレクトロン株式会社 | レシピ更新方法 |
| WO2022201409A1 (ja) * | 2021-03-25 | 2022-09-29 | 株式会社日立ハイテク | プラズマ処理装置およびプラズマ処理方法 |
| CN115070605A (zh) * | 2022-06-22 | 2022-09-20 | 北京烁科精微电子装备有限公司 | 一种抛光设备及其工作方法 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001110885A (ja) * | 1999-10-14 | 2001-04-20 | Hitachi Ltd | 半導体処理装置および半導体処理方法 |
| US20060042757A1 (en) * | 2004-08-27 | 2006-03-02 | Seiichiro Kanno | Wafer processing apparatus capable of controlling wafer temperature |
| JP2006080222A (ja) | 2004-09-08 | 2006-03-23 | Hitachi Ltd | ウエハ処理装置 |
| JP2006155169A (ja) * | 2004-11-29 | 2006-06-15 | Omron Corp | 温度制御方法、温度調節器および熱処理システム |
| JP4509820B2 (ja) * | 2005-02-15 | 2010-07-21 | 東京エレクトロン株式会社 | 熱処理板の温度設定方法,熱処理板の温度設定装置,プログラム及びプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP4551256B2 (ja) * | 2005-03-31 | 2010-09-22 | 東京エレクトロン株式会社 | 載置台の温度制御装置及び載置台の温度制御方法及び処理装置及び載置台温度制御プログラム |
| JP4801547B2 (ja) * | 2005-09-30 | 2011-10-26 | 東京エレクトロン株式会社 | 載置台、基板処理装置、プラズマ処理装置、載置台の制御方法、プラズマ処理装置の制御方法、制御プログラム、及び記憶媒体 |
| JP5138195B2 (ja) | 2006-09-26 | 2013-02-06 | 東京エレクトロン株式会社 | 伝熱ガス供給機構および伝熱ガス供給方法、ならびに基板処理装置および基板処理方法 |
| JP4553266B2 (ja) * | 2007-04-13 | 2010-09-29 | 東京エレクトロン株式会社 | 熱処理装置、制御定数の自動調整方法及び記憶媒体 |
| JP5301812B2 (ja) * | 2007-11-14 | 2013-09-25 | 東京エレクトロン株式会社 | プラズマ処理装置 |
| JP5358956B2 (ja) | 2008-01-19 | 2013-12-04 | 東京エレクトロン株式会社 | 載置台装置、処理装置、温度制御方法及び記憶媒体 |
| JP5433171B2 (ja) | 2008-06-16 | 2014-03-05 | 株式会社日立ハイテクノロジーズ | 試料温度の制御方法 |
| JP5397215B2 (ja) * | 2009-12-25 | 2014-01-22 | ソニー株式会社 | 半導体製造装置、半導体装置の製造方法、シミュレーション装置及びシミュレーションプログラム |
| JP5657444B2 (ja) * | 2011-03-23 | 2015-01-21 | 東京エレクトロン株式会社 | 温度測定装置及び温度測定方法 |
| JP5730638B2 (ja) * | 2011-03-28 | 2015-06-10 | 東京エレクトロン株式会社 | 基板処理装置の処理室内構成部材及びその温度測定方法 |
| JP5781803B2 (ja) * | 2011-03-30 | 2015-09-24 | 東京エレクトロン株式会社 | 温度制御方法及びプラズマ処理システム |
| JP5712741B2 (ja) * | 2011-03-31 | 2015-05-07 | 東京エレクトロン株式会社 | プラズマ処理装置、プラズマ処理方法及び記憶媒体 |
| JP5659286B2 (ja) * | 2013-12-06 | 2015-01-28 | 株式会社日立ハイテクノロジーズ | 試料台及びこれを備えたプラズマ処理装置 |
-
2015
- 2015-06-24 JP JP2015126769A patent/JP6570894B2/ja active Active
-
2016
- 2016-06-21 KR KR1020160077382A patent/KR102299595B1/ko active IP Right Grant
- 2016-06-22 US US15/189,195 patent/US10921773B2/en active Active
- 2016-06-22 TW TW105119501A patent/TWI736537B/zh active
- 2016-06-24 CN CN201610475906.8A patent/CN106298447B/zh active Active
-
2021
- 2021-01-15 US US17/149,820 patent/US20210132575A1/en not_active Abandoned
-
2023
- 2023-12-07 US US18/532,330 patent/US20240103482A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN106298447A (zh) | 2017-01-04 |
| KR102299595B1 (ko) | 2021-09-08 |
| US10921773B2 (en) | 2021-02-16 |
| JP2017011169A (ja) | 2017-01-12 |
| US20160378092A1 (en) | 2016-12-29 |
| US20240103482A1 (en) | 2024-03-28 |
| CN106298447B (zh) | 2020-02-07 |
| KR20170000788A (ko) | 2017-01-03 |
| TWI736537B (zh) | 2021-08-21 |
| TW201724395A (zh) | 2017-07-01 |
| US20210132575A1 (en) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6570894B2 (ja) | 温度制御方法 | |
| US20220013387A1 (en) | Substrate processing system and temperature control method | |
| US10375763B2 (en) | Temperature control apparatus, temperature control method and recording medium | |
| JP6594960B2 (ja) | ペデスタルの流体による熱制御 | |
| JP7204595B2 (ja) | 補正情報作成方法、基板処理方法、および基板処理システム | |
| JP2019114612A (ja) | プラズマエッチング装置及びプラズマエッチング方法 | |
| JP2019530208A (ja) | 個別に制御可能なヒータ素子のアレイを有する基板キャリア | |
| TWI808206B (zh) | 電漿蝕刻方法及電漿蝕刻裝置 | |
| JP2019530209A (ja) | ヒータ素子アレイを使用する、基板キャリアの温度測定 | |
| TW202107610A (zh) | 電漿處理裝置、溫度控制方法及溫度控制程式 | |
| US11019285B2 (en) | Calibration method of infrared camera and calibration system of infrared camera | |
| JP6961025B2 (ja) | 基板処理システム | |
| JP2020095020A (ja) | 赤外線カメラの校正方法および赤外線カメラの校正システム | |
| TWI819012B (zh) | 電漿處理裝置、電漿狀態檢測方法及電漿狀態檢測程式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180301 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190807 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6570894 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |