以下、本実施形態を図面に基づいて説明する。図1〜図10は本実施形態に係る眼鏡枠形状測定装置、眼鏡枠形状測定用治具の構成について説明する図である。なお、本実施形態においては、眼鏡枠形状測定装置1の奥行き方向(眼鏡が配置された際の眼鏡フレームの前後方向)をZ方向、奥行き方向に垂直(眼鏡が配置された際の眼鏡フレームの左右方向)な平面上の水平方向をX方向、鉛直方向(眼鏡が配置された際の眼鏡フレームの左右方向)をY方向として説明する。
なお、本実施形態における眼鏡枠形状測定装置1には、眼鏡フレームFは、上下を逆さにした状態で配置される。すなわち、眼鏡枠形状測定装置1に眼鏡フレームが配置された場合に、眼鏡フレームFの左右リムFL,FRの上端が下側、眼鏡フレームFの左右リムFL,FRの下端が上側となる。もちろん、本実施形態の眼鏡枠形状測定装置1においては、眼鏡フレームFが上下逆さに配置される構成を例に挙げて説明するがこれに限定されない。例えば、眼鏡形状測定装置1は、眼鏡フレームFが上下逆さで無い状態(装用者に装用される状態)で配置される構成であってもよい。また、例えば、眼鏡形状測定装置1は、眼鏡フレームFの左右リムFL,FRが装置の下方向(テンプル部分が上方向)に向けて配置されるような構成であってもよいし、眼鏡フレームFの左右リムFL,FRが装置の上方向に向けて配置されるような構成であってもよい。
<概要>
本発明の実施形態に係る眼鏡枠形状測定装置1の概要について説明する。例えば、本実施形態に関わる眼鏡枠形状測定装置1は、テンプル調整手段(テンプル調整ユニット)30、測定手段(測定ユニット)100、眼鏡フレーム保持ユニット(眼鏡フレーム保持手段)500、制御手段(制御部)50等を備える。
例えば、眼鏡フレーム保持ユニット500は、眼鏡フレームFを保持するために用いられる。
例えば、測定ユニット100は、眼鏡フレーム保持ユニット500に保持された眼鏡フレームFのリムの輪郭をトレースしてリムの形状を測定するために用いられる。
例えば、テンプル調整ユニット30は、眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接し、左右のテンプルFTL,FTRの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルFTL,FTRの間の幅を変更させる。例えば、幅を変更するとは、幅を広げる構成、幅を狭くする構成等が挙げられる。
例えば、テンプル調整ユニット30としては、左右のテンプルFTL,FTRのそれぞれの少なくとも一部に当接する左右の当接部35L,35Rと、左右の当接部35L,35Rの少なくともいずれか一方の当接部の位置を移動させる当接部移動手段と、を備える構成が挙げられる。このように、左右のテンプルFTL,FTRの幅を種々の幅に変更することが可能となることによって、装用者の個々の頭幅に応じた眼鏡フレームFの変形状態を再現することが可能となる。これによって、装用者によって、眼鏡装用時の眼鏡フレームFの変形状態が異なる場合であっても、装用者毎の眼鏡フレームFの変形状態を容易に再現することが可能となる。
また、例えば、テンプル調整手段30としては、左右のテンプルFTL,FTRのそれぞれの少なくとも一部に当接する左右の当接部35L,35Rであって、左右の当接部35L,35R間の距離が所定の距離で設定された左右の当接部35L,35Rを備える構成が挙げられる。このようなに、左右のテンプルFTL,FTRの幅が所定の幅に変更されることによって、装用者が眼鏡(眼鏡フレームF)を装用した状態と近い状態の眼鏡フレームFの変形状態を容易に再現することが可能となる。
例えば、当接部移動手段は、手動にて調整される構成が挙げられる。この場合、例えば、操作者が操作部(例えば、回転ノブ、スライダー、駆動スイッチ等)を有し、操作部が操作されることによって、当接部の位置が移動される構成を用いてもよい。
また、例えば、当接部移動手段は、自動で調整される構成が挙げられる。この場合、例えば、眼鏡フレームを装用する被検者(装用者)の頭幅情報を取得する取得手段を備え、当接部移動手段(例えば、制御部50)は、取得手段によって取得された頭幅情報に基づいて、左右の当接部35L,35Rの少なくともいずれか一方の当接部を左右方向に移動させる構成を用いてもよい。なお、例えば、取得手段としては、頭幅情報を入力可能な構成であってもよいし、他の装置によって取得された頭幅情報を受信する構成であってもよい。このように、頭幅情報に基づいて、自動的にテンプルの幅が変更されることによって、容易にスムーズに測定を行うことができる。
例えば、当接部35(左右の当接部35L,35R)は、眼鏡フレームFの左右のテンプルFTL,FTRの耳かけ部分と当接するように配置される構成であってもよい。このように、当接部35が耳かけ部分と当接するように配置されることによって、眼鏡フレームFを眼鏡枠形状測定装置1に設置した際に、実際に装用者が眼鏡フレームFを装用した状態と近い状態を再現することができる。操作者は、この状態の下で、左右のテンプルFTL,FTRの幅を変更させることによって、実際に装用者が眼鏡を装用した状態とより近い状態での眼鏡フレームの変形状態を再現することができる。
例えば、上記記載のようなテンプル調整ユニット30によって、眼鏡フレームFの左右のテンプルFTL,FTRの幅を変更し、リムの形状が測定される。例えば、測定ユニット100は、テンプル調整ユニット30によって、左右のテンプルFTL,FTRの位置が変更された状態(例えば、広げられた状態)での、眼鏡フレームのリムの測定を開始し、眼鏡フレームのリム輪郭をトレースすることによって、リムの形状を測定する。このように、左右のテンプルFTL,FTRの間の幅を変更させる構成を設けることによって、装用者が眼鏡フレームFを装用した際に、眼鏡フレームFが変形することを考慮して眼鏡フレームFの形状を測定することが可能となる。これによって、装用状態に近い状態での測定結果を取得することができ、眼鏡フレームFが変形することを考慮した測定結果(例えば、FPD、そり角等)を取得することができる。
なお、上記のように眼鏡枠形状測定装置1に設けられたテンプル調整ユニット30は、眼鏡フレームFに取り付けられる眼鏡枠形状測定用治具80に設けられてもよい。例えば、眼鏡フレームFに取り付けられる眼鏡枠形状測定用治具80は、眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接し、左右のテンプルFTL,FTRの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルFTL,FTRの間の幅を変更させるテンプル調整ユニット30を備えるようにしてもよい。このような構成とすることによって、テンプル調整ユニット30を備えていない眼鏡枠形状測定装置にであっても、眼鏡フレームFが変形することを考慮した測定結果を取得することができる。
なお、上記のような眼鏡枠形状測定装置1を眼鏡レンズ加工装置が備える構成としてもよい。このような、構成とすることによって、リムの形状測定と、眼鏡レンズの加工を一体の装置で行うことが可能となるため、眼鏡レンズ加工までの動作をスムーズに行うことができる。
<実施例>
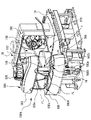
本開示の典型的な実施例の1つについて、図面を参照して説明する。以下、図1は、本体カバーを取り除いた状態における眼鏡枠形状測定装置の概略構成図である。例えば、本実施例において、眼鏡枠形状測定装置1は、眼鏡フレーム保持ユニット(眼鏡フレーム保持手段)500と、測定ユニット(測定手段)100と、テンプル調整ユニット(テンプル調整手段)30と、を有する。
<フレーム保持ユニット>
例えば、眼鏡フレーム保持ユニット(以下、フレーム保持ユニットと記載)500は、眼鏡フレームFを所定の測定状態で保持するために用いられる。例えば、フレーム保持ユニット500は、本体ベース10の前側に配置されている。例えば、測定ユニット100は、フレーム保持ユニット500によって保持されたフレームFのリムの輪郭をトレースしてリムの三次元形状を測定するために用いられる。例えば、測定ユニット100の主要な機構は、本体ベース10に配置され、フレーム保持ユニット500によって保持された眼鏡フレームFの後側(装用者の眼が位置する側)に位置する。
例えば、テンプル調整ユニット30は、眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接され、左右のテンプルの間の幅を変更させるために用いられる。例えば、テンプル調整ユニット30は、本体ベース10に配置され、フレーム保持ユニット500によって保持された眼鏡フレームFの後側に位置する。また、例えば、テンプル調整ユニット30は、測定ユニット100の干渉しないように設置されている。例えば、テンプル調整ユニット30は、測定ユニット100の駆動領域と干渉しないように設置される。より詳細には、例えば、テンプル調整ユニット30は、測定ユニット100と干渉しないように、測定ユニット100の周囲に設置される構成が挙げられる。また、例えば、テンプル調整ユニット30は、測定ユニット100と干渉しないように、測定ユニット100の前後方向(Z方向)のスペースに設置される構成が挙げられる。
例えば、本実施例において、フレーム保持ユニット500は、リム保持ユニット(リム保持手段)500A等を備える。例えば、リム保持ユニット500Aは、左右のリムFL,FRにおける少なくとも一部を保持する構成を有する。例えば、リム保持ユニット500Aは、第1スライダー503、第2スライダー505、ガイド部508、クランプ部580A,580B、回転ノブ570等を備える。例えば、第1スライダー503及び第2スライダー505は、左右のリムFL,FRを眼鏡フレーム配置時に上下方向から挟み込んで保持するために、上下方向(Y方向)に移動される。例えば、ガイド部508は、第1スライダー503及び第2スライダー505を上下方向に移動可能にガイドする。例えば、ガイド機構508は、横方向である左右方向(X方向)の中央部に配置されている。
なお、本実施例において、リム保持ユニット500Aは、眼鏡フレームFをY方向から眼鏡フレームFを挟み込むように、第1スライダー503が上側に配置され、第2スライダー505が下側に配置されているがこれに限定されない。例えば、リム保持ユニット500Aは、X方向又は斜め方向(Y方向とZ方向の間の方向)から眼鏡フレームFを挟み込む構成であっても良い。なお、本実施例においては、フレーム保持ユニット500として、リムを保持するリム保持ユニット500Aを例に挙げているがこれに限定されない。フレーム保持ユニット500は、眼鏡フレームFを保持できる構成であればよい。例えば、フレーム保持ユニット500は、眼鏡フレームFのテンプル部分で眼鏡フレームFを保持するテンプル保持ユニットであってもよいし、眼鏡フレームFのブリッジ部分で眼鏡フレームFを保持するブリッジ保持ユニットであってもよい。また、例えば、フレーム保持ユニット500は、リム保持ユニット500A、テンプル保持ユニット、ブリッジ保持ユニット等のいずれかを組み合わせて用いる構成であってもよい。
例えば、第1スライダー503は、カバー503aを有し、第2スライダー505に対向するカバー503aの面(例えば、図1では、カバー503aの下面)が左右リムの下端に当接する。また、第2スライダー505は、カバー505aを有し、第1スライダー503に対向するカバー505aの面(例えば、図1では505aの上面)が左右リムの上端に当接する。もちろん、第1スライダー503及び第2スライダー505に当接される眼鏡フレームFの左右リムの上端と下端は、上下が逆に配置される構成であっても良い。
例えば、クランプ部(クランプ機構)580A,580Bは、左右のリムFL,FRを、前ピン及び後ピンによって前後方向からクランプするために用いられる。クランプ部580A,580Bは、左右リムFL,FRの上部及び下部の少なくとも何れか一方の前後方向の位置を規制する。例えば、クランプ部580Aは、右リムFRを前後方向からクランプするための一対の前ピン582a及び後ピン582bを有する。例えば、前ピン582a及び後ピン582bは、少なくとも一方のピンが他方のピンに向けて移動することによって、前ピン582a及び後ピン582bの間隔が変更される。なお、クランプ部580Bは、上記のクランプ部580Aと左右対称であるので、各部材には同符号を付し、その説明は省略する。このように、クランプ部580A,580Bによって、例えば、左右リム(FL、FR)の下部(下端)がクランプ部580A,580Bのそれぞれの前ピン及び後ピンによって保持され、リムの前後方向の位置が規制される。
例えば、第1スライダー503の上部には、回転ノブ570が設けられている。例えば、回転ノブ570は、クランプ部(クランプ機構)580A,580Bを駆動させるために用いられる。例えば、回転ノブ570は、クランプ部580A,580Bと、ギア等を介して接続されている。例えば、操作者が、回転ノブ570を時計回り又は反時計回りに回転することによって、クランプ部580Aにおける前ピン582a及び後ピン582bの少なくとも一方のピンが移動される。また、クランプ部580Bにおいてもクランプ部580Aと同様に、回転ノブ570の回転によって前ピン及び後ピンの少なくとも一方のピンが移動される(例えば、特開2015−007536号公報参照)。
なお、本実施例においては、操作者が回転ノブ570を回転することにより、クランプ機構580A、580Bを駆動するものとしたが、これに限定されない。クランプ機構580A、580Bの駆動手段としては、クランプ機構580A、580Bが駆動できる構成であればよい。例えば、クランプ機構580A、580Bは、操作者によって直接移動される構成としてもよい。また、例えば、クランプ機構580A、580Bは、モータによって駆動される構成としてもよい。
なお、本実施例においては、リムの前後方向の位置を規制する構成として、上記クランプ機構580A及び580Bの構成を例に挙げて説明したがこれに限定されない。周知の機構が使用されても良い。例えば、左右リムの前後方向を固定する機構としては、V字状の溝を持つ当接部材(規制部材)を左右リム用にそれぞれ設ける構成でも良い。
<測定ユニット>
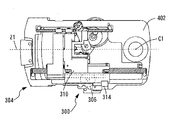
図2〜図4は、測定ユニット100の構成について説明する図である。図2は、測定ユニット100を上方から見た図である。図3は、本体ベース10を省いた状態の円弧動ベース402を上から見た図である。図4は、回転ユニット200及び回旋ユニット120を側面から見た図である例えば、測定ユニット100は、テンプル調整ユニット30と干渉しないように設置される。より詳細には、例えば、測定ユニット100は、測定ユニット100と干渉しないように、テンプル調整ユニット30の内側のスペースに設置される構成が挙げられる。なお、テンプル調整ユニット30が駆動可能(移動可能)な構成の場合には、測定ユニット100は、測定ユニット100の駆動範囲と、テンプル調整ユニット30の駆動範囲とが、干渉しない位置に設置される。また、例えば、測定ユニット100は、テンプル調整ユニット30と干渉しないように、テンプル調整ユニット30の前後方向(Z方向)のスペースに設置される構成が挙げられる。
例えば、本実施例において、測定ユニット100は、測定子110と、測定子軸112と、測定子移動ユニット108と、回転ユニット200と、前後移動ユニット300と、を備える。測定子110は、眼鏡フレームFのリム(FR、FL)の溝(図示を略す)に挿入される。測定子110は、測定子軸112の先端に取り付けられている。測定子移動ユニット108は、測定子110を径方向に移動させるために構成されている。例えば、測定子移動ユニット108によって、測定子110は、回転軸Z1の付近から離れる方向及び回転軸Z1の付近に近づく方向に移動される。例えば、回転ユニット200は、回転軸Z1を中心に測定子移動ユニット108を回転するために構成されている。例えば、回転軸Z1は、測定子110の先端110aがリムの輪郭に沿ってリムをトレースするように、リムの輪郭内を通るように設定されている。例えば、回転ユニット200は、フレーム保持ユニット500に保持されたリム(FR、FL)の後側に配置されている。例えば、前後移動ユニット300は、フレームFの前後方向におけるリムの変化に沿って測定子110がリムをトレースするように、前後方向における測定子110の位置を変化させるために構成されている。
本実施例において、例えば、測定子移動ユニット108は、回転軸Z1に対して非平行に設定された回旋軸A1を中心にして測定子軸112をリムの径方向に回旋させるための回旋ユニット120を備える。なお、測定子移動ユニット108としては、回旋ユニット120の構成に限定されない。測定子移動ユニット108は、測定子110を径方向に移動させることが可能な構成であればよい。例えば、回転軸Z1に垂直な平面(測定基準面S1)に平行に直線移動する構成であっても良い。また、例えば、回転軸Z1に垂直な平面(測定基準面S1)に平行に回転移動する構成であっても良い。
また、例えば、測定ユニット100は、フレーム保持ユニット500に保持されたフレームFの右リムFRを測定するための第1測定位置と、他方の左リムFLを測定するための第2測定位置と、の間で回転ユニット200等を移動する左右移動ユニット400を備える。例えば、左右移動ユニット400は、円弧動ベース402、モータ404等を備える。例えば、回転ユニット200等が配置された円弧動ベース402は、モータ404の駆動によって、軸C1(縦軸)を中心に回転される。例えば、軸C1(縦軸)は、回転ユニット200よりさらに後方で、Y方向に延びている。例えば、軸C1は、フレーム保持ユニット500の横方向(X方向)の中心を通って前後方向(Z方向)に延びる中心線L1の位置に設定されている。これにより、回転ユニット200は軸C1を中心にして左右方向に移動され、回転軸Z1の測定位置が右リムFRを測定するための第1測定位置と、他方の左リムFLを測定するための第2測定位置と、の間で切換えられる。なお、左右移動ユニット400は、左右方向に平行(直線的)に回転ユニット200(ベース402)を移動する構成であってもよい。
例えば、図3に示されるように、前後移動ユニット300は、回転ユニット200が搭載される前後動ベース310と、前後動ベース310を回転軸Z1の方向に移動可能にガイドするガイド機構304と、モータ306と、等を備える。回転ユニット200(前後動ベース310)は、ガイド機構304にガイドされ、モータ306の駆動によって測定位置と退避位置とに移動される。また、前後移動ユニット300は、回転軸Z1方向における前後動ベース310の移動位置を検知するためのセンサ314を備える。センサ314の検知情報は、回転軸Z1方向における測定子110の移動位置の検知に利用される。
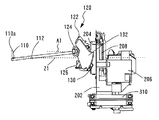
例えば、図4に示されるように、前後動ベース310上に保持ブロック202が固定されている。例えば、保持ブロック202には、回転ベース204が回転軸Z1を中心に回転可能に保持されている。例えば、回転ベース204は、保持ブロック202に固定されたモータ206によって、ギヤ等から構成される回転伝達機構208を介して回転軸Z1の回りに回転される。例えば、回転ベース204には、回旋ユニット120が搭載されている。例えば、回転ベース204には、固定ブロック122が配置される。例えば、固定ブロック122には、測定子軸支持部材124が回旋軸A1を中心にして回転可能に保持されている。測定子軸支持部材124に測定子軸112の基部が取り付けられている。測定子軸112が回旋軸A1を中心にして回旋されることにより、測定子110は回転軸Z1から円弧運動として径方向に移動される。測定子軸支持部材124は、測定子110の先端が回転軸Z1から離れる方向に回転されるように、測定圧付与手段の一例であるバネ(付勢部材)126によって付勢力が与えられる構成となっている。
ここで、回旋軸A1は、回転軸Z1に対して或る角度β(図2参照)で傾斜して設定されている。例えば、角度βは45度である構成が挙げられる。もちろん、角度βは、45度に限定されない。例えば、角度βは90度(回転軸Z1に対して回転軸Z1に直交し構成)であっても良い。回旋軸A1が回転軸Z1に対して傾斜していることにより、測定子110の先端が回転軸Z1から離れるに従って、測定基準面S1(回転軸Z1に直交する平面)に対する測定子110の先端方向の傾斜角が大きくなる。これにより、高カーブフレームのリムから測定子110が外れ難くなり、高カーブフレームのリムの輪郭をスムーズにトレースできる。なお、測定基準面S1の基準位置は、フレーム保持ユニット500の所定位置(例えば、基準平面S1が第2スライダー505側の前ピン582a及び後ピン582bの中央を通る位置)とされる。
例えば、測定子軸支持部材124には、センサ板132が取り付けられている。また、固定ブロック122には、動径方向における測定子110の位置を検知するための検知ユニットの例であるセンサ130が取り付けられている。センサ130はセンサ板132に形成された指標を検知することで、測定子軸112の回旋状態を検知し、その検知結果に基づいて、測定子110の位置を検知する。また、バネ126の付勢力に抗して測定子軸112の測定子110を回転軸Z1の付近に移動させる移動機構140が、前後動ベース310に設けられている。
なお、測定ユニット100の構成は、例えば、特開2011−12899号公報、特開2000−304530号、特開2014−21069号公報、特開2015−7664号公報等の周知のものが使用でき、その構成は特に問わない。
<テンプル調整ユニット>
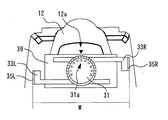
図5は、テンプル調整ユニット30について説明する図である。例えば、テンプル調整ユニット30は、眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接し、左右のテンプルFTL,FTRの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルFTL,FTRの間の幅を変更させる。
なお、本実施例において、テンプル調整ユニット30としては、眼鏡フレームFの左右のテンプルFTL,FTRの双方に当接し、眼鏡フレームを保持する構成を例に挙げて説明する。もちろん、上記記載のように、テンプル調整ユニット30は、眼鏡フレームFの左右のテンプルFTL,FTRの一方のみに当接し、眼鏡フレームFを保持する構成であってもよい。この場合、例えば、眼鏡フレームFの左右のテンプルFTL,FTRの一方の周囲を取り囲むように保持することによって、上下左右方向(XY方向)を規制する構成であってもよい。
例えば、テンプル調整ユニット30は、回転ノブ31、支柱32、移動部33、当接部35、ガイド部36、ギア37、支持部39等を備える。
例えば、回転ノブ31は、操作者によって操作される。例えば、支柱32は、回転ノブ31の下に固定されている。例えば、支柱32には、ギア37が固定されている。
例えば、移動部33は、左側のテンプルFTLに用いるための左側移動部33Lと、右側のテンプルFTRに用いるための右側移動部33Rと、を備える。例えば、左右の移動部33L,33Rには、ギア37と噛み合うギア部分が形成されている。
例えば、当接部35は、左右のテンプルFTL,FTRのそれぞれの少なくとも一部に当接する。例えば、当接部35は、左側のテンプルFTLの少なくとも一部に当接する左側当接部35Lと、右側のテンプルFTRの少なくとも一部に当接する右側当接部35Rと、を備える。例えば、左側移動部33Lには、左側当接部35Lが固定されている。例えば、右側移動部33Rには、右側当接部35Rが固定されている。例えば、左右の当接部35L,35Rは、眼鏡フレームFの左右のテンプルFTL,FTRの内側に当接する。
なお、実施例においては、移動部33と、当接部35と、が別の部材である場合を例に挙げて説明しているが、これに限定されない。移動部33と、当接部35と、が一体的に形成されているものであってもよい。なお、当接部35は、左右のテンプルFTL,FTRの少なくとも一部に当接するものであればよい。例えば、当接部35は、左右のテンプルFTL,FTRのそれぞれ全体に当接するものであってもよいし、左右のテンプルFTL,FTRそれぞれの一部分(例えば、耳かけ部、ヒンジ等)に当接するものであってもよい。もちろん、左右のテンプルFTL,FTRで、左右の当接部35L,35Rの構成が異なる構成であってもよい。なお、本実施例においては、当接部35は、眼鏡フレームFの左右のテンプルFTL,FTRの耳かけ部分と当接するように配置されている。このように、当接部35が耳かけ部分と当接するように配置されることによって、眼鏡フレームFを眼鏡枠形状測定装置1に設置した際に、実際に、装用者が眼鏡(眼鏡フレームF)を装用した状態と近い状態(眼鏡フレームFが装用者の耳部分で保持された状態)を再現することができる。すなわち、操作者は、この状態の下で、テンプルの幅の変更をさせることによって、実際に装用者が眼鏡を装用した状態とより近い状態での眼鏡フレームFの変形状態を再現することができる。
例えば、ガイド部36は、支持部39に固定され、左右の移動部33L,33Rをフレーム保持ユニット500の横方向(X方向)に移動可能にガイドするために用いられる。例えば、ガイド部36には、左側移動部33Lが取り付けられる左側ガイド部36Lと、右側移動部33Rが取り付けられる右側ガイド部33Rと、を備える。例えば、支持部39は、本体ベース10に固定される。なお、本実施例におけるガイド部36は、左右の移動部33L,33Rをスライドさせる機構を用いているがこれに限定されない。左右の移動部33L,33Rを所定の方向にガイド可能な構成であればよい。例えば、左右の移動部33L,33Rと噛み合うようなギア機構の構成を用いてもよい。
図6は、テンプル調整ユニット30の動作について説明する模式図である。例えば、図6(a)と図6(b)は、テンプル調整ユニット30の調整状態がそれぞれ異なる場合の一例を示す図である。例えば、本実施例において、操作者によって、回転ノブ31が回転されることによって、支柱32及び支柱32に固定されたギア37が回転する。ギア37が回転されることによって、ギア37と噛み合った左右の移動部33L,33Rは、左右のガイド部36L,36Rに沿ってX方向に移動される。これによって、左右の当接部35L,35Rの間の距離Wが変更される。すなわち、左右の当接部35L,35Rに、左右のテンプルFTL,FTRが当接されていた場合に、左右のテンプルの間の幅を調整することが可能となる。なお、回転ノブ31の操作によって左右の移動部33L,33Rを移動させるための伝達機構の構成としては、ギアを用いた構成に限定されない。回転ノブ31の回転が左右の移動部33L,33Rに伝達される構成であればよい。例えば、伝達機構としては、ベルト、弾性部材等を用いる構成であってもよい。
例えば、本実施例において、テンプル調整ユニット30では、回転ノブ31の回転方向(正回転と逆回転)の切り換えによって、左右の当接部35L,35R(左右の移動部33L,33R)の移動方向が変更される。例えば、本実施例においては、回転ノブ31が正回転をした場合に、左側移動部33Lが左方向(A方向)に移動され、右側移動部33Rが右方向(B方向)に移動される(図6(a)の状態から図6(b)の状態へと変更される)。また、例えば、本実施例においては、回転ノブ31が逆回転をした場合に、左側移動部33Lが右方向(B方向)に移動され、右側移動部33Rが左方向(A方向)に移動される(図6(b)の状態から図6(a)の状態へと変更される)。もちろん、回転ノブ31の回転方向に対する移動部35の移動方向が、本実施例の構成とは異なる構成であってもよい。
図7は、本体カバーが取り付けられた場合における眼鏡枠形状測定装置1の一部(後側)を上方向から見た概略構成図である。例えば、本体カバー12の上面には、指標(マーク)12aが付されている。例えば、回転ノブ31の上面には、左右の当接部35L,35Rの間の距離(幅)Wを設定するための指標31aが付されている。例えば、指標31aとしては、目盛と数値が付される。例えば、目盛の所定の間隔毎に、数値が付されている。例えば、数値は、左右の当接部35L,35Rの間の幅Wの値を示している。
例えば、操作者は、指標12aに対して、指標31aの所望の数値に対応する目盛を一致させるように、回転ノブ31を回転させる。これによって、左右の当接部35L,35Rの間の幅Wが変更される。例えば、操作者が幅Wを16cmに設定した場合には、16の数値に対応する目盛が、指標12aと一致するように、回転ノブ31を回転させる。なお、本実施例においては、操作者は、指標31a(目盛と数値)によって、幅Wの設定値を認識することができる構成を例に挙げているがこれに限定されない。例えば、表示部(例えば、モニタ)を設けて、表示部に幅Wに関する情報が表示されるようにしてもよい。例えば、表示部には、設定された幅Wの値が表示されてもよいし、指標31a(目盛と数値)が電子的に表示されてもよい。もちろん、表示部としては、別の表示部(例えば、ディスプレイ60)が兼用されてもよいし、別途、専用の表示部が設けられる構成であってもよい。また、本実施例において、回転ノブ31に指標31a(目盛と数値)が付されている構成を例に挙げて説明しているがこれに限定されない。指標31aは、回転ノブとは別の位置に表示される構成であってもよい。例えば、回転ノブ31の周辺に付されている構成であってもよい。また例えば、表示部等に表示される構成であってもよい。
なお、本実施例においては、手動によって、テンプル調整ユニット30の左右の当接部35L,35Rの間の幅Wを変更する構成を例に挙げて説明しているがこれに限定されない。テンプル調整ユニット30の左右の当接部35L,35Rの間の幅Wは、モータ等の電動機構を用いて、自動で幅Wが調整可能な構成としてもよい。この場合、例えば、左右の当接部35L,35R(左右の移動部33L,33R)の少なくとも一方の移動は、位置センサ等によって、左右の移動部33L,33Rの位置を検出することで制御する構成を用いてもよい。また、例えば、例えば、左右の当接部35L,35R(左右の移動部33L,33R)の少なくとも一方の移動は、モータの回転量等を検知することによって、制御する構成を用いてもよい。
このような構成によって、テンプル調整ユニット30は、左右の当接部35L,35Rの間の幅Wを変更することが可能となる。これによって、テンプル調整ユニット30に、眼鏡フレームFを設置した場合に、眼鏡フレームFの左右のテンプルFTL,FTRの間の幅を変更することが可能となる。
なお、本実施例において、左右の当接部35L,35Rは、眼鏡フレームFの左右のテンプルFTL,FTRの内側に当接する構成としているが、これに限定されない。例えば、左右の当接部35L,35Rは、眼鏡フレームFの左右のテンプルFTL,FTRの外側と当接する構成であってもよい。この場合、例えば、テンプル調整ユニット30としては、左右の当接部35L,35Rが左右のテンプルFTL,FTRを保持する構成を有し、左右のテンプルFTL,FTRの少なくとも一方を外側方向に向けて移動させる構成(例えば、引っ張る構成等)、左右のテンプルFTL,FTRの少なくとも一方を内側方向に向けて移動させる構成(例えば、押し込む構成等)であってもよい。
なお、本実施例におけるテンプル調整ユニット30では、左右の当接部35L,35Rの間の幅を変更するために、左右の当接部35L,35R(左右の移動部33L,33R)の両方が移動する構成を例に挙げて説明したがこれに限定されない。例えば、本実施例において、左右の当接部35L,35Rの少なくともいずれか一方の当接部の位置が移動される構成であればよい。例えば、左右の当接部35L,35Rの一方のみが移動される構成であってもよい。
<制御手段>
図8は、眼鏡枠形状測定装置1に関する制御ブロック図である。制御部50には、不揮発性メモリ(記憶手段)52、ディスプレイ60、等が接続されている。
例えば、制御部50は、CPU(プロセッサ)、RAM、ROM等を備える。制御部50のCPUは、各部(例えば、各センサ314、130)及び各ユニットの駆動手段(例えば、各モータ404、306、206)等、装置全体の制御を司る。また、例えば、制御部50は、各種演算(例えば、各センサからの出力信号等に基づいてリムの三次元形状の演算等)を行う演算手段(演算ユニット)として機能する。RAMは、各種情報を一時的に記憶する。制御部50のROMには、装置全体の動作を制御するための各種プログラム、初期値等が記憶されている。なお、制御部50は、複数の制御部(つまり、複数のプロセッサ)によって構成されてもよい。不揮発性メモリ(記憶手段)52は、電源の供給が遮断されても記憶内容を保持できる非一過性の記憶媒体である。例えば、ハードディスクドライブ、フラッシュROM、眼鏡枠形状測定装置1に着脱可能に装着されるUSBメモリ等を不揮発性メモリ(メモリ)52として使用することができる。
例えば、本実施例において、ディスプレイ60は、タッチパネル式のディスプレイが用いられる。すなわち、本実施例において、ディスプレイ60がタッチパネルであるため、ディスプレイ60が操作部(操作ユニット)として機能する。この場合、制御部50はディスプレイ60が持つタッチパネル機能により入力信号を受け、ディスプレイ60の図形及び情報の表示等を制御する。もちろん、眼鏡枠形状測定装置1に操作部が設けられる構成としてもよい。この場合、例えば、操作部には、例えば、マウス、ジョイスティック、キーボード、タッチパネル等の少なくともいずれかを用いればよい。もちろん、ディスプレイ60と、操作部と、の双方が用いられ、眼鏡枠形状測定装置1が操作される構成としてもよい。なお、本実施例においては、ディスプレイ60が操作部として機能するとともに、別途、操作部62が備えられた構成を例に挙げて説明する。
<制御動作>
以上のような構成を持つ装置の動作を説明する。操作者は、フレーム保持ユニット500に眼鏡フレームFを保持させる。操作者が回転ノブ570と共に第1スライダー503を持ち上げると、第2スライダー505が連動して下方に下がり、眼鏡フレームFの左リムFL及び右リムFRを挿入する空間が開く。操作者はフレームFの後側(左テンプルFTL及び右テンプルFTR)が測定ユニット100の回転ユニット200側に向くように、第1スライダー503及び第2スライダー505の間に挟みこむ。また、操作者は右リムFR及び左リムFLを前ピン582a及び後ピン582bの間に位置させる。操作者によって第1スライダー503が下げられると、これに連動して第2スライダー505が上昇し、フレームF(左リムFL及び右リムFR)が第1スライダー503の対向面と第2スライダー505の対向面との間に保持される。その後、操作者によって回転ノブ570が回転させることによって、クランプ機構580A及び580Bが作動され、4箇所に配置された前ピン582a及び後ピン582bによって左リムFL及び右リムFRがクランプされる。
次いで、操作者は、予め、測定しておいた装用者の頭幅に基づいて、テンプル調整ユニット30の調整を行う。なお、例えば、頭幅の測定方法としては、触覚計等を用いて測定することができる。例えば、操作者は、左右のテンプルFTL,FTRの耳かけ部分を左右の当接部35L,35Rと当接させた状態で、回転ノブ31を回転させる。操作者は、測定しておいた装用者の頭幅と、左右の当接部35L,35Rの間の幅Wと、が一致するように、回転ノブ31を回転させる。これによって、左右の当接部35L,35Rと当接する眼鏡フレームFの左右のテンプルFTL,FTRの位置が変更され、眼鏡フレームFが変形される。なお、左右の当接部35L,35Rの幅Wが、変形前の眼鏡フレームFの左右のテンプルFTL,FTRの幅よりも小さい場合には、眼鏡フレームFは変形しない。このようにして、眼鏡フレームFが変形した状態で保持される。すなわち、装用者が眼鏡(眼鏡フレームF)を装用した際に、眼鏡フレームFが変形することを考慮した状態での測定が可能となる。
例えば、操作者は、テンプル調整ユニット30によって、左右のテンプルFTL,FTRの幅が変更された状態で、眼鏡フレームFのリムの測定を開始し、眼鏡フレームFのリム輪郭をトレースすることによって、リムの形状を測定する。すなわち、眼鏡装用時における眼鏡フレームFの変形状態を再現した状態で眼鏡フレームFが保持させることができたら、測定ユニット100によるリムの形状測定の段階に移行する。操作者は、ディスプレイ60を操作し、リムの測定を開始させる。例えば、リムの測定は、右リムから測定が開始される。もちろん。左リムから測定が開始される構成であってもよい。
例えば、制御部50は、前後移動ユニット300の駆動を制御し、退避位置に置かれていた回転ユニット200及び測定子110等を測定開始の初期位置まで移動させる。なお、例えば、測定開始の初期位置は、測定子110が右リムの下端側の前ピン582aと後ピン582bとの中央位置に設定されている。もちろん、測定開始の初期位置は、任意の位置に設定することができる。制御部50は、移動機構140を制御して測定子軸112の回旋の固定を解除し、バネ126の付勢力によって測定子110の先端をリムの溝に挿入させる。
その後、例えば、制御部50は、リムをトレースするために、回転ユニット200のモータ206を駆動し、回転ベース204を回転軸Z1の回りに回転させる。回転ベース204の回転により回旋ユニット120と共に、測定子軸112及び測定子110が回転軸Z1の回りに回転される。これによって、測定子110がリムの周方向に移動される。すなわち、リムの輪郭が測定子110によってトレースされる。トレース時の測定子軸112の回旋状態はセンサ130によって検知される。また、回転軸Z1方向におけるリムの変化に追従して測定子110が前後方向(回転軸Z1方向)に移動される。この前後移動は、センサ314によって検知される。例えば、制御部50は、センサ130の検知信号に基づき、回転ベース204の回転角毎に基準位置(回転軸Z1の位置)からのリムの動径長rnを得る。例えば、回転ベース204の或る回転角(θn)における動径長(rn)は、測定子軸112の回旋角と、回旋中心から測定子110の先端までの距離(これは既知である)と、等に基づいて演算される。また、例えば、制御部50はセンサ314の検知信号に基づいて回転ベースの回転角(θn)毎に、回転軸Z1方向の右リムFRの位置(zn)を得る。そして、制御部50は、回転ベース204を1回転させることにより、リムの全周の三次元形状データ(rn,zn,θn)(n=1,2,3、・・・,N)を取得する。
右リムFRの測定が終了すると、制御部50は、左右移動ユニット400のモータ404の駆動を制御し、左リムFLの測定用の所定位置に円弧動ベース402及び回転ユニット200を移動する。その後、制御部50は、測定ユニット200の各モータを制御し、右リムFRの測定と同様にして、左リムの全周の三次元形状データを取得する。右リムFR及び左リムFLの測定結果(トレース結果)は、メモリ52に記憶される。
以上のようにして、眼鏡装用時における眼鏡フレームFの変形状態を再現した状態でのリムの形状を取得することができる。すなわち、眼鏡フレームFが変形することを考慮した測定結果(例えば、反り角、FPD(フレームPD)等)を取得することができる。また、眼鏡フレームFが変形することを考慮した測定結果に基づいて、より精度よくレンズ加工のための加工データを取得することができる。
図9は、三次元形状データに基づいて各種パラメータを算出方法について説明する図である。図9において、FR1は、右リムFRの三次元形状データであり、FL1は左リムFLの三次元形状データである。二次元玉型FTR1は右リムFRの二次元玉型(動径)データであり、二次元玉型FTL1は左リムFLの二次元玉型(動径)データであり、それぞれの動径をXYの直交軸データで表したものである。すなわち、二次元玉型FTR1及び二次元玉型FTL1は、それぞれ三次元形状FR1及びFL1を眼鏡フレームFの正面方向のXY平面に投影した形状である。
例えば、右リムFRの玉型FTR1において、点ARは、X方向の耳側端(図10上の最も右側)の位置を示す。例えば、右リムFRの玉型FTR1において、点BRは、X方向の鼻側端(図10上の最も左側)の位置を示す。例えば、右リムFRの玉型FTR1において、点CRは、Y方向の上端の位置を示す。例えば、右リムFRの玉型FTR1において、点DRは、Y方向の下端の位置を示す。例えば、右リムFRの玉型FTR1において、FCRは、これらの点AR・BR・CR・DRの幾何中心(ボクシング中心)を示している。例えば、データムラインDLは、この幾何中心FCRを通るX方向のラインを示している。例えば、点V1Rは、右リムFRの三次元形状データFR1において、データムラインDL上に位置するX方向の鼻側の位置を示している。例えば、点V2Rは、データムラインDL上に位置するX方向の耳側の位置を示している。例えば、点V1Rと点V2Rを結ぶ線分をTARとし、線分TARとX軸方向とが成す角を角度αR1とする。なお、この角度αR1は、右リムFのフレーム反り角度として算出される。
例えば、本実施例において、左リムFLについても、右リムFRと同様な考え方の演算により、左リムFLの玉型FTL1における、幾何中心FCL、左リムFLのフレーム反り角度αL1が算出される。なお、例えば、フレーム(リム)の反り角度としては、角度αR1と角度αL1との平均値α1として求めることができる。なお、例えば、図10において、点BLは、左リムFLの玉型FTL1において、X方向の鼻側端(図10上のFTL1の最も右側)の点である。その他の右リムFRに対する左リムFLの同一要素には、右リムFRに使用されている各符号の「R」を「L」に書き直し、その説明は省略する。
例えば、幾何中心間距離FPDは、右リムFRの中心FCRと左リムFLの中心FCLとのX方向の座標位置の差によって取得される。また、眼鏡レンズの加工データの基礎として使用するために、右リムFR及び左リムFLのそれぞれの三次元形状データに基づいて、右リムFRの溝及び左リムFLの溝の三次元周長値データ(周長値データ)が求められる。
例えば、制御部50は、二次元玉型(FTR1とFTL1の両方、又は一方)、幾何中心間距離FPD、フレーム反り角(反り角度)α1(αR1、αL1)、周長値のデータを取得し、メモリ52に記憶させる。このように、測定ユニット200によって測定された二次元玉型(FTR1、FTL1)は、眼鏡フレームFの右リム及び左リムを所定方向(例えば、正面方向D1)に投影したときの形状として得られる。
例えば、取得したフレーム反り角α1(αR1、αL1)を用いることによって、眼鏡フレームFを装用する装用者のアイポイント位置(二次元玉型(二次元玉型形状)に対するレンズの光学中心の位置関係)を、より精度よく決定することができる。例えば、制御部50は、右リムFRの形状について、データムラインDL上の点V1Rと点V2Rとを結ぶ線分TARの垂直二等分線の方向を新たなZ方向とし、右リムFRの三次元形状データFR1を新たなZ方向に直交するXY平面に投影した形状として取得する。制御部50は、装用者の瞳孔間距離PDの位置を、XY平面上の二次元玉型形状に投影した位置として求めることにより、二次元玉型に対するアイポイント位置を取得することができる。
以上のように、左右のテンプルの間の幅を変更させる構成を設けることによって、装用者が眼鏡(眼鏡フレーム)を装用した際に、眼鏡フレームが変形することを考慮して眼鏡フレームの形状を測定することが可能となる。これによって、装用状態に近い状態での測定結果を取得することができ、眼鏡フレームが変形することを考慮した測定結果(例えば、FPD、そり角等)を取得することができる。すなわち、眼鏡レンズの周縁加工のためのより適切なデータを取得することができる。なお、ハイカーブフレーム(そり角が大きい眼鏡フレーム)の場合には、装用者が眼鏡を装用した際における、眼鏡フレームの変形量が大きくなる。このため、特に、眼鏡フレームが、ハイカーブフレームの場合には、本開示の技術が有用となる。
また、本実施例のように、テンプル調整ユニット30をテンプルの幅を種々の幅に変更することが可能な構成とすることによって、装用者の個々の顔幅に応じた眼鏡フレームの変形状態を再現することが可能となる。これによって、装用者によって、眼鏡装用時の眼鏡フレームの変形状態が異なる場合であっても、装用者毎の眼鏡フレームの変形状態を容易に再現することが可能となる。
<変容例>
なお、本実施例において、テンプル調整ユニット30は、左右のテンプルFTL,FTRの間の幅を任意の幅に変更可能な構成を例に挙げて説明しているが、これに限定されない。例えば、テンプル調整ユニット30は、左右のテンプルFTL,FTRの間の幅を所定の幅(予め設定された幅)にのみ変更可能な構成としてもよい。この場合、例えば、テンプル調整ユニット30は、左右のテンプルFTL,FTRのそれぞれの少なくとも一部に当接し、左右の当接部間の距離が所定の距離で設定された左右の当接部35L,35Rを備える構成が挙げられる。また、例えば、左右のテンプルFTL,FTRを差し込むための差し込み部位(例えば、凹部等)を設け、差し込む部位に左右のテンプルFTL,FTRを差し込むことで、左右のテンプルFTL,FTRの間の幅を変更する構成が挙げられる。なお、例えば、左右の当接部35L,35Rの間の幅は、人の平均的な頭幅等で設定される構成が挙げられる。このように、左右のテンプルFTL,FTRの幅が所定の幅に変更されることによって、容易な構成で、装用者が眼鏡(眼鏡フレーム)を装用した状態と近い状態の眼鏡フレームの変形状態を容易に再現することが可能となる。
なお、本実施例においては、操作者がテンプル調整ユニット30を操作して、左右のテンプルFTL,FTRの間の幅を調整する構成を例に挙げて説明しているが、これに限定されない。例えば、眼鏡フレームを装用する被検者の頭幅情報を取得する取得手段を設け、取得手段によって取得された顔幅情報に基づいて、左右の当接部の少なくともいずれか一方の当接部を左右方向に移動させる構成としてもよい。より詳細な一例としては、制御部50は、取得された顔幅情報に基づいて、左右の当接部35L,35R(左右の移動部33L,33R)を移動させるためのモータ等を制御し、左右の当接部35L,35R(左右の移動部33L,33R)の少なくともいずれか一方の当接部を左右方向に移動させる。なお、頭幅情報を取得する取得手段としては種々の構成のものを適用することができる。例えば、取得手段としては、頭幅情報を受信する構成であってもよい。また、例えば、取得手段としては、頭幅測定手段等によって頭幅を測定する構成であってもよい。また、例えば、取得手段としては、頭幅入力手段等が操作者によって操作され、頭幅が入力される構成であってもよい。上記のような構成とすることによって、頭幅情報に基づいて、自動的に左右のテンプルFTL,FTRの間の幅が変更されるため、容易にスムーズに測眼鏡フレームの測定を行うことができる。
なお、本実施例において、テンプル調整ユニット30としては、回転ノブ31の回転によって、左右のテンプルFTL,FTRの間の幅を任意の幅に変更可能な構成を例に挙げて説明しているが、これに限定されない。操作者による操作によって、左右のテンプルFTL,FTRの間の幅を変更可能な構成であればよい。例えば、左右の当接部35L,35R(左右の移動部33L,33R)の少なくとも一方を直接的に移動させる構成であってもよい。この場合、例えば、左右の当接部35L,35R(左右の移動部33L,33R)に、レバー等を設け、操作者が、レバーをX方向にスライドさせることによって、左右の当接部35L,35R(左右の移動部33L,33R)の少なくとも一方がスライドされる構成であってもよい。また、例えば、左右のテンプルFTL,FTRを差し込むための差し込み部位(例えば、凹部等)が、所定の間隔毎に設けられており、操作者が任意の差し込む部位に左右のテンプルFTL,FTRを差し込むことで、左右のテンプルFTL,FTRの間の幅を変更する構成であってもよい。
なお、本実施例においては、テンプル調整ユニット30において、左右のテンプルFTL,FTRの間の幅を任意の幅に変更可能な構成を例に挙げて説明しているが、これに限定されない。左右のテンプルFTL,FTRの間の幅の変更が、段階的に設定されている構成であってもよい。例えば、左右のテンプルFTL,FTRの間の幅が段階的に設定されており、各幅には対応する項目が付される。例えば、項目には、一般男性(例えば、60歳以下の男性)、一般女性(例えば、60歳以下の女性)、高齢者男性(例えば、60歳以上の男性)、高齢者女性(例えば、60歳以上の女性)等の項目が設定される。操作者は、この項目から所望の項目を選択することによって、左右のテンプルFTL,FTRの間の幅が変更される。なお、上記記載のように年齢毎に段階的に幅を設定する場合には、例えば、その年齢に対応する装用者の平均的な頭幅等から設定される。例えば、一般男性の幅を設定する場合には、一般的な60歳以下の男性の頭幅の平均値等を参考にして設定される。
なお、本実施例においては、テンプル調整ユニット30が眼鏡枠形状測定装置1に設けられている構成を例に挙げて説明したがこれに限定されない。テンプル調整ユニット30が備えられていない眼鏡枠形状測定装置においても、本開示の技術は適用可能である。
例えば、眼鏡フレームFに取り付けられる眼鏡枠形状測定用治具を用いる構成であってもよい。図10は、眼鏡枠形状測定用治具の一例を示す図である。例えば、眼鏡枠形状測定用治具80は、テンプル調整ユニット(テンプル調整手段)85を備える。例えば、テンプル調整ユニット85は、眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接し、左右のテンプルFTL,FTRの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルFTL,FTRの間の幅を変更させる。本実施例における、テンプル調整ユニット85には、目盛部87が備えられている。例えば、操作者は、目盛部87の目盛を確認することで、テンプル調整ユニット85における左右の当接部88L,88Rの間の幅の値を認識することができる。例えば、目盛部87は、ガイド部を兼用しており、ガイド部に目盛が付されている。例えば、当接部88L,88Rは、目盛部(ガイド部)87に沿って移動する。すなわち、当接部88L,88Rは、移動部を兼ねる。これによって、左右の当接部88L,88Rの間の幅が変更される。例えば、当接部88L,88Rは、左右のテンプルFTL,FTRを把持可能な構成となっている。なお、眼鏡枠形状測定用治具80のテンプル調整ユニット85の構成は上記構成に限定されない。本実施例における眼鏡枠形状測定用治具80のテンプル調整ユニット85には、上記記載のテンプル調整ユニット30の種々の構成を適用することができる。
眼鏡枠形状測定用治具80を使用する場合、操作者は、眼鏡枠形状測定用治具80を眼鏡フレームFに装着する。操作者は、眼鏡枠形状測定用治具80のテンプル調整ユニット85を眼鏡フレームFの左右のテンプルFTL,FTRの少なくとも一方に当接させ、左右のテンプルの少なくとも一方のテンプルの位置を移動させることによって、左右のテンプルFTL,FTRの間の幅を変更させる。この状態で、操作者は、眼鏡枠形状測定装置に眼鏡フレームFを配置し、測定を開始する。これによって、テンプル調整ユニットが備えられていない眼鏡枠形状測定装置においても、装用者が眼鏡(眼鏡フレーム)を装用した際に、眼鏡フレームが変形することを考慮した眼鏡フレームの形状を測定することが可能となる。
なお、本実施例における眼鏡形状枠測定装置が眼鏡レンズ加工装置に備えられている構成であってもよい。例えば、眼鏡レンズ加工装置としては、眼鏡レンズをレンズチャック軸に保持して回転するレンズ回転手段と、加工具回転軸に取り付けられた加工具を回転する加工具回転手段と、を備える。例えば、眼鏡レンズの周縁を鏡面加工する眼鏡レンズ加工装置において、眼鏡レンズ加工装置の制御部は、眼鏡枠形状測定装置によって取得されたリムの形状情報に基づいて、レンズ回転手段と加工具回転手段を制御して、眼鏡レンズの周縁加工を行う。なお、眼鏡レンズ加工装置の制御部としては、眼鏡枠形状測定装置の制御部が兼用される構成であってもよいし、別途、眼鏡レンズ加工装置の各種制御を行うための制御部が設けられる構成であってもよい。