次に、図面を参照して本発明の実施の形態を説明する。図1は、本発明の一実施形態に係る遠隔操作装置46によって走行指示されるロボットトラクタ1の全体的な構成を示す側面図である。図2は、ロボットトラクタ1の平面図である。図3は、ロボットトラクタ1の制御系の主要な構成を示すブロック図である。
本発明の実施の一形態に係る遠隔操作装置(走行指示装置)46は、図1及び図3に示す自律走行・自律作業システム99に用いられるものである。この自律走行・自律作業システム(自律走行システム)99は、トラクタ(作業車両)1と、当該トラクタ1の制御部4と無線通信することによりオペレータがトラクタ1を遠隔操作するための遠隔操作装置46と、を備えて構成される。
この自律走行・自律作業システム99は、圃場内で自律走行及び自律作業を行う1台又は複数台の作業車両により、圃場内における農作業の全部又は一部を行わせるものである。本実施形態では作業車両としてトラクタ1が用いられているが、これに代えて、例えば田植機、コンバイン、土木・建築作業装置、除雪車等を用いることができる。また、乗用型の作業車両を用いることに代えて、歩行型の作業車両を用いることもできる。
本明細書において自律走行とは、図3に示すようにトラクタ1が備える制御部4(具体的には、ECU)によって、当該トラクタ1が走行のために備える構成が制御され、予め定められた経路に沿ってトラクタ1が走行することを意味する。また、本明細書において自律作業とは、トラクタ1が作業のために備える構成が前記制御部4によって制御され、予め定められた経路に沿ってトラクタ1が作業を行うことを意味する。
以下の説明では、自律走行及び自律作業を行うトラクタを「無人トラクタ」又は「ロボットトラクタ」と称し、オペレータが直接操作することにより走行して作業を行うトラクタを「有人トラクタ」と称することがある。圃場内において農作業の一部が無人トラクタにより行われる場合、残りの農作業は有人トラクタにより行われる。単一の圃場において無人トラクタ及び有人トラクタにより農作業を分担して行うことを、農作業の協調作業、追従作業、随伴作業等と称することがある。なお、上記の協調作業には、ある圃場において農作業を無人トラクタが行い、それと同時に別の圃場において農作業を有人トラクタが行うことが含まれても良い。
本実施形態において、無人トラクタと有人トラクタの違いは、オペレータの直接操作の有無であり、トラクタとしての構成は無人と有人とで共通である。即ち、無人トラクタであっても、オペレータが搭乗(乗車)して直接操作することができる(言い換えれば、有人トラクタとして使用することができる)。また、有人トラクタであっても、オペレータが降車して自律走行及び自律作業を行わせることができる(言い換えれば、無人トラクタとして使用することができる)。
初めに、ロボットトラクタ(以下、単に「トラクタ」と称する場合がある。)1について説明する。トラクタ1は、圃場領域内を自律走行することが可能な走行機体(車体部)2を備える。走行機体2には、図1及び図2に示す作業機3が着脱可能に取り付けられている。この作業機3としては、例えば、耕耘機、プラウ、施肥機、草刈機、播種機等の種々の作業機があり、これらの中から必要に応じて所望の作業機3を選択して走行機体2に装着することができる。走行機体2は、装着された作業機3の高さ及び姿勢を変更可能に構成されている。
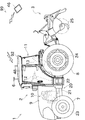
トラクタ1の構成について、図1及び図2を参照してより詳細に説明する。トラクタ1の走行機体2は、図1に示すように、その前部が左右1対の前輪7,7で支持され、その後部が左右1対の後輪8,8で支持されている。
走行機体2の前部にはボンネット9が配置されている。このボンネット9内には、トラクタ1の駆動源であるエンジン10及び燃料タンク(図略)が収容されている。このエンジン10は、例えばディーゼルエンジンにより構成することができるが、これに限るものではなく、例えばガソリンエンジンにより構成しても良い。また、駆動源としては、エンジンに加えて、又はこれに代えて、電気モータを使用しても良い。
ボンネット9の後方には、オペレータが搭乗するためのキャビン11が配置されている。このキャビン11の内部には、オペレータが操向操作するためのステアリングハンドル12と、オペレータが座ることが可能な座席13と、各種の操作を行うための様々な操作装置と、が主として設けられている。ただし、作業車両は、キャビン11付きのものに限るものではなく、キャビン11を備えないものであってもよい。
上記の操作装置としては、図2に示すモニタ装置14、スロットルレバー15、シフトレバー、PTOスイッチ17、PTO変速レバー18、及び複数の油圧変速レバー16等を例として挙げることができる。これらの操作装置は、座席13の近傍、又はステアリングハンドル12の近傍に配置されている。モニタ装置14は、トラクタ1の様々な情報を表示可能に構成されている。スロットルレバー15は、エンジン10の回転速度を設定するためのものである。前記シフトレバーは、トランスミッション22の変速比を変更操作するためのものである。PTOスイッチ17は、トランスミッション22の後端から突出した図略のPTO軸(動力取出軸)への動力の伝達/遮断を切換操作するためのものである。即ち、PTOスイッチがON状態であるときPTO軸に動力が伝達されてPTO軸が回転し、作業機3が駆動される一方、PTOスイッチがOFF状態であるときPTO軸への動力が遮断されてPTO軸が回転せず、作業機3が停止される。PTO変速レバー18は、作業機3に入力される動力の変更操作を行うものであり、具体的にはPTO軸の回転速度の変速操作を行うものである。油圧変速レバー16は、図略の油圧外部取出バルブを切換操作することができる。
また、座席13の右側に配置されたアームレスト19の前部には、主変速レバー27、作業機昇降スイッチ28等の操作装置が設けられている。
主変速レバー27はトラクタ1の走行速度を変更するためのものであり、主変速レバー27を前方に倒すと走行速度が速くなり、後方に倒すと走行速度が遅くなるように構成されている。この主変速レバー27は無段階の操作が可能に構成されており、トラクタ1の走行速度は主変速レバー27の操作量に応じて無段階に変速される。
作業機昇降スイッチ28は、主変速レバー27に設けられた上下操作可能な電気スイッチとして構成されており、作業機3を上昇及び下降させるときに使用される。これにより、作業機3を下降させて耕耘爪25による耕耘作業を開始させたり、上昇させて耕耘作業を終了させたりすることができる。
図1に示すように、走行機体2の下部には、トラクタ1のシャーシ20が設けられている。当該シャーシ20は、機体フレーム21、トランスミッション22、フロントアクスル23、及びリアアクスル24等から構成されている。
機体フレーム21は、トラクタ1の前部における支持部材であって、直接、又は防振部材等を介してエンジン10を支持している。トランスミッション22は、エンジン10からの動力を変化させてフロントアクスル23及びリアアクスル24に伝達する。フロントアクスル23は、トランスミッション22から入力された動力を前輪7に伝達するように構成されている。リアアクスル24は、トランスミッション22から入力された動力を後輪8に伝達するように構成されている。
図3に示すように、トラクタ1は、走行機体2の動作(前進、後進、停止及び旋回等)並びに作業機3の動作(昇降、駆動及び停止等)を制御するための制御部4を備える。制御部4には、ガバナ装置41、変速装置42、及び昇降アクチュエータ44等がそれぞれ電気的に接続されている。
ガバナ装置41は、エンジン10の回転数を調整するものである。ガバナ装置41を制御部4により制御してラック位置を適宜に調整することにより、エンジン10の回転数を所望の回転数にすることができる。
変速装置42は、具体的には例えば可動斜板式の油圧式無段変速装置であり、トランスミッション22に備えられている。変速装置42を制御部4により制御して図略の前記斜板の角度を適宜に調整することにより、トランスミッション22の変速比を所望の変速比にすることができる。
昇降アクチュエータ44は、例えば作業機3を走行機体2に連結している3点リンク機構を動作させることにより、作業機3を退避位置(農作業を行わない位置)又は作業位置(農作業を行う位置)の何れかに上げ下げするものである。なお、本実施形態において作業機3はロータリ耕耘装置として構成されているので、作業機3による農作業は耕耘作業を意味する。昇降アクチュエータ44を制御部4により制御して作業機3を適宜に昇降動作させることにより、所望の高さで作業機3により農作業を行うことができる。
上述のような制御部4を備えるトラクタ1は、オペレータがキャビン11内に搭乗して各種操作をすることにより、当該制御部4によりトラクタ1の各部(走行機体2、作業機3等)を制御して、圃場内を走行しながら農作業を行うことができるように構成されている。加えて、本実施形態のトラクタ1は、オペレータがトラクタ1に搭乗しなくても、遠隔操作装置46により出力される所定の制御信号に基づいて自律走行させることが可能となっている。
具体的には、図3に示すように、トラクタ1は、自律走行を可能とするための各種の構成を備えている。更に、トラクタ1は、測位システムに基づいて自ら(走行機体2)の位置情報を取得するために必要な測位用アンテナ6等の構成を備えている。このような構成により、トラクタ1は、測位システムに基づいて自らの位置情報を取得して、圃場上を自律走行することが可能となっている。
次に、自律走行を可能とするためにトラクタ1が備える構成について詳細に説明する。具体的には、トラクタ1は、図1及び図3に示すように、操舵アクチュエータ43、測位用アンテナ6及び無線通信用アンテナ48等を備える。
操舵アクチュエータ43は、例えば、ステアリングハンドル12の回転軸(ステアリングシャフト)の中途部に設けられ、ステアリングハンドル12の回転角度(操舵角)を調整するものである。予め定められた経路をトラクタ1が(無人トラクタとして)走行する場合、制御部4は、当該経路に沿ってトラクタ1が走行するようにステアリングハンドル12の適切な回動角度を算出し、算出した回動角度でステアリングハンドル12が回動するように操舵アクチュエータ43を制御する。
測位用アンテナ6は、例えば衛星測位システム(GNSS)等の測位システムを構成する測位衛星からの信号を受信するものである。図1に示すように、測位用アンテナ6は、トラクタ1のキャビン11のルーフ92の上面に配置されている。測位用アンテナ6で受信された測位信号は、図3に示す位置情報算出部49に入力される。位置情報算出部49は、トラクタ1の走行機体2(厳密には、測位用アンテナ6)の位置情報を、例えば緯度・経度情報として算出する。当該位置情報算出部49で検出された位置情報は、制御部4に入力されたり、遠隔操作装置46に送信されたりして、自律走行に利用される。
なお、本実施形態ではGNSS−RTK法を利用した高精度の衛星測位システムが用いられているが、これに限られるものではなく、高精度の位置座標が得られる限りにおいて他の測位システムを用いても良い。例えば、相対測位方式(DGPS)、又は静止衛星型衛星航法補強システム(SBAS)を使用することが考えられる。
また、図1及び図2には示されていないが、トラクタ1には、当該トラクタ1の方位角を検出する方位センサ47が取り付けられている。この方位センサ47としては、例えば磁気センサ又はジャイロセンサ等を用いることができる。方位センサ47の検出結果は、トラクタ1の現在の向き(方位角)を示す情報として、上述した位置情報とともに、制御部4に入力されたり、遠隔操作装置46に送信されたりして、自律走行に利用される。
無線通信用アンテナ48は、オペレータが操作する遠隔操作装置46からの信号を受信したり、遠隔操作装置46への信号を送信したりするものである。図1に示すように、無線通信用アンテナ48は、トラクタ1のキャビン11が備えるルーフ92の上面に配置されている。無線通信用アンテナ48で受信した遠隔操作装置46からの信号は、図3に示す無線通信部40で信号処理された後、制御部4に入力される。また、制御部4から遠隔操作装置46に送信する信号は、無線通信部40で信号処理された後、無線通信用アンテナ48から送信されて遠隔操作装置46で受信される。
遠隔操作装置46は、図4に示すように、タッチパネル39を備えるタブレット型のパーソナルコンピュータとして構成される。オペレータは、遠隔操作装置46のディスプレイ(表示部)37に表示された情報(例えば、トラクタ1の現在位置等)を参照して確認することができる。また、オペレータは、上記のタッチパネル39、又は、ディスプレイ37の傍に配置されたハードウェアキー38等を操作して、トラクタ1の制御部4に、トラクタ1を制御するための制御信号を送信することができる。なお、遠隔操作装置46はタブレット型のパーソナルコンピュータに限るものではなく、これに代えて、例えばノート型のパーソナルコンピュータで構成することも可能である。あるいは、前述の協調作業を行うために図11に示すように有人のトラクタ1xを無人のトラクタ1に付随して走行させる場合、有人側のトラクタ1xに搭載されるモニタ装置46xを遠隔操作装置とすることもできる。
次に、遠隔操作装置46によるトラクタ1の操作について、図5を参照して説明する。図5は、遠隔操作装置46のディスプレイ37における表示例を示す図である。
図5には、自律走行するトラクタ1の状態に関する情報等を遠隔操作装置46のディスプレイ37に表示する例が示されている。図5に示すように、ディスプレイ37の画面の左側には、前方カメラ画像領域80と、後方カメラ画像領域81と、が配置されている。画面の右側には、作業情報領域82が配置されている。また、画面の上部には、作業開始/一時停止ボタン83等が配置されている。
前方カメラ画像領域80及び後方カメラ画像領域81には、トラクタ1に搭載された図略のカメラによって撮影された映像が表示される。これにより、オペレータはトラクタ1の周辺の状況を遠方から把握することができる。
作業情報領域82には、圃場60の形状が表示されるとともに、トラクタ1が耕耘作業をしながら自律走行した作業経路(走行経路)63等が表示されている。圃場60は、作業機3による作業が行われる作業領域61と、作業機3による作業が行われない(枕地や無耕作地等の)非作業領域62と、が含まれる。作業経路63は、互いに平行となるように作業領域61に配置された直線状の農作業経路63aと、2本の農作業経路63aを繋ぐように非作業領域62に配置された旋回路63bと、を含むように予め生成される。作業情報領域82には、トラクタ1が既に走行した作業経路63だけでなく、将来走行する予定の作業経路63を表示することもできる。
作業情報領域82の表示内容は、拡大縮小ボタン85を適宜操作することによって、拡大させたり縮小させたりすることができる。また、作業情報領域82において任意の点にオペレータが指等で触れることで、圃場60における特定の位置を指示することもできる。
作業開始/一時停止ボタン83は、トラクタ1に対して自律走行の開始又は自律走行の一時停止を指示するためのものである。トラクタ1が停止している状態で、オペレータが作業開始/一時停止ボタン83に指で触れると、自律走行による作業の開始を指令する制御信号が遠隔操作装置46からトラクタ1の制御部4に送信される。制御部4は、その制御信号に基づいてトラクタ1の自律走行を開始させるとともに、作業機3を適宜のタイミングで昇降して作業を行う。また、トラクタ1の自律走行による作業中に、オペレータが作業開始/一時停止ボタン83に指で触れると、自律走行による作業の一時停止を指令する制御信号が遠隔操作装置46からトラクタ1の制御部4に送信される。制御部4は、その制御信号に基づいてトラクタ1の自律走行及び作業を一時停止させる。
拡大縮小ボタン85及び作業開始/一時停止ボタン83は、何れもディスプレイ37に表示される仮想的なボタンとして構成され、当該ボタンの表示領域に相当するタッチパネル39の位置をオペレータが指で触れることによって操作することができる。
このように構成されたトラクタ1は、遠隔操作装置46を用いるオペレータの指示に基づいて、圃場60上の作業経路63に沿って自律走行しつつ、作業機3による作業を行うことができる。
次に、トラクタ1を自律走行させる作業経路63を生成するために遠隔操作装置46に備えられた構成について説明する。
図3に示すように、遠隔操作装置46は、上述したディスプレイ37の他に、制御部50と、作業車両情報取得部51と、圃場情報取得部52と、作業経路生成部53と、記憶部54と、を備えている。
制御部50は、遠隔操作装置46に備えられた各部を制御するためのものである。制御部50は、作業経路生成部53で生成された作業経路63をディスプレイ37に表示させたり、トラクタ1の現在位置等をディスプレイ37にリアルタイムで表示させたり、作業経路63に沿って自律走行するようにトラクタ1に指示したりことができる。
作業車両情報取得部51は、トラクタ1に関する情報を取得するためのものである。作業車両情報取得部51は、トラクタ1の機種、トラクタ1においてGPSが取り付けられている位置、作業機3のサイズ及び形状、作業機3の位置、トラクタ1の作業中の車速及びエンジン回転数、トラクタ1の旋回中の車速及びエンジン回転数等について、オペレータが遠隔操作装置46を適宜操作することにより指定した内容を取得することができる。作業車両情報取得部51が取得したトラクタ1に関する情報は、記憶部54に記憶される。
圃場情報取得部52は、圃場60に関する情報を取得するためのものである。圃場情報取得部52は、圃場60の位置及び形状、作業領域61の位置及び形状、自律走行させたい開始位置及び終了位置、作業方向等を圃場情報として取得することができるように構成されている。圃場情報取得部52が取得した圃場60に関する情報は、記憶部54に記憶される。
圃場60の位置及び形状の情報は、例えばオペレータがトラクタ1に搭乗して圃場の外周に沿って1回り周回するように運転し、そのときの測位用アンテナ6の位置情報の推移を記録することで、自動的に取得することができる。ただし、圃場60の位置及び形状は、ディスプレイ37に地図を表示させた状態でオペレータが遠隔操作装置46を操作して当該地図上の複数の点を指定することで得られた多角形に基づいて取得することもできる。
作業領域61の位置及び形状の情報は、例えば、ディスプレイ37に圃場60の位置及び形状をグラフィカルに表示させた状態で、オペレータが遠隔操作装置46を操作して圃場60内の複数の点を指定することで得られた多角形に基づいて取得することができる。なお、圃場から作業領域61を除いた領域が非作業領域62となる。
自律走行させたい開始位置及び終了位置は、オペレータが圃場60をディスプレイ37に表示させた状態で、当該圃場60内の点をそれぞれ指定することで得ることができる。
作業方向とは、作業領域61において作業機3により作業を行いながらトラクタ1を走行させる方向を意味する。この作業方向は、例えば、作業領域61をディスプレイ37に表示させた状態で、オペレータが任意の2点を指定することにより得ることができる。
作業経路生成部53は、トラクタ1を自律走行させる経路である作業経路63を生成するためのものである。作業経路生成部53は、記憶部54に記憶された情報(トラクタ1に関する情報及び圃場60に関する情報等)に基づいて、トラクタ1の作業経路63を生成することができる。
オペレータは、トラクタ1に関する情報及び圃場60に関する情報を遠隔操作装置46に入力した後、作業経路63の生成を指示する。このとき、オペレータは、自律走行させるトラクタ1に他のトラクタ(有人トラクタ)1xを随伴させるか否か(即ち、上述の協調作業を行わせるか否か)、協調作業させる場合の互いの位置関係、協調作業するトラクタ1xの作業機3の幅、トラクタ1が旋回路63bにおいて旋回する時にスキップする農作業経路63aの本数、農作業経路63a同士の重複の有無及び重複幅等を指定する。
本実施形態においては、他のトラクタ(有人トラクタ)1xを随伴させる場合の位置関係として、トラクタ1の真後ろを他のトラクタ1xに走行させるか、トラクタ1の左斜め後方を他のトラクタ1xに走行させるか、トラクタ1の右斜め後方を他のトラクタ1xに走行させるか、の何れかを選択することが可能となっている。なお、トラクタ1の真後ろを他のトラクタ1xに走行させる場合、トラクタ1xの作業機3の幅はトラクタ1の作業機の幅と同一であるものとして扱い、オペレータによるトラクタ1xの作業機3の幅の指定を受け付けないものであってもよい。
作業経路生成部53は、オペレータにより作業経路63の作成が指示されると、指定された圃場60内で、指定された開始位置(又はその近傍)を始端とし、指定された終了位置(又はその近傍)を終端とする作業経路63を生成する。この作業経路63は、直線状の農作業経路63aを作業領域61内で互いに平行に配置するとともに、2本の農作業経路63aを互いに繋ぐ旋回路63bを非作業領域62内に配置することにより形成される。なお、農作業経路63aの向きは、オペレータにより指定された作業方向となるように向けられる。
以上の構成により、トラクタ1を自律走行させる作業経路63を生成することができる。生成された作業経路63の情報(始点、終点、始点からトラクタ1が移動すべき方向等を含む。)は、記憶部54に記憶される。
更に、トラクタ1に他のトラクタ(有人トラクタ)1xを随伴させる旨をオペレータが指定した場合は、作業経路生成部53は、当該他のトラクタ1xの走行経路も併せて生成する。トラクタ1の真後ろを他のトラクタ1xが走行する場合、他のトラクタ1xの走行経路は、先行側のトラクタ(無人トラクタ)1の走行経路と一致する。一方、トラクタ1の左斜め後方又は右斜め後方を他のトラクタ1xが走行する場合、他のトラクタ1xの走行経路は、先行側のトラクタ1とは一致しない。生成された他のトラクタ1xの経路の情報(始点、終点、始点からトラクタ1xが移動すべき方向等を含む。)は、記憶部54に記憶される。
作業経路63の生成が完了すると、オペレータは、遠隔操作装置46を適宜操作することにより、記憶部54に記憶された作業経路63の情報をトラクタ1の制御部4に送信する。これにより、トラクタ1が走行すべき作業経路63を制御部4側で取得することができる。
ところで、上記のように生成された作業経路63に沿ってトラクタ1を自律走行させるには、その前段階として、当該作業経路63の始点となる位置にトラクタ1を移動させ、更に、トラクタ1の向きを、作業経路63の始点での向きに合わせる必要がある。本実施形態では、このようにトラクタ1の位置及び向きを合わせる準備作業を、オペレータがトラクタ1に搭乗して直接運転することにより行うこととしている。このとき、遠隔操作装置46の制御部4は、オペレータが行う上記の準備作業を支援するために、ディスプレイ37に適宜の画面を表示することができる。
次に、上記したオペレータの準備作業を支援するために遠隔操作装置46が備える構成を説明する。
図3に示すように、遠隔操作装置46は、位置情報取得部56と、方位角取得部57と、経路開始情報取得部(特定情報取得部)58と、を備えている。
位置情報取得部56は、トラクタ1の現在位置を示す情報を取得する。この現在位置の情報は、トラクタ1の制御部4が備える位置情報算出部49において算出され、無線によって遠隔操作装置46に送信される。位置情報取得部56は、遠隔操作装置46が受信した信号に基づいて、トラクタ1の現在位置(例えば緯度・経度の値)を取得する。
方位角取得部57は、トラクタ1の現在の向き(方位角)を示す情報を取得する。この方位角の情報は、トラクタ1が備える方位センサ47の検出結果により求められ、無線によって遠隔操作装置46に送信される。方位角取得部57は、遠隔操作装置46が受信した信号に基づいて、トラクタ1の現在の向きを取得する。
経路開始情報取得部58は、作業経路生成部53が生成して記憶部54に記憶した作業経路63の情報のうち、少なくとも、当該作業経路63の始点の位置(開始位置情報)、及び、始点から走行機体2を移動させる方向を取得する。
制御部50は、図6等に示すように、位置情報取得部56で取得されたトラクタ1の現在位置と、方位角取得部57で取得されたトラクタ1の現在の向きと、作業経路生成部53に記憶された作業経路63と、をディスプレイ37に表示させることができる。
次に、トラクタ1を作業経路63の開始位置へ移動させる際に、ディスプレイ37において開始位置を示す図形の表示態様が変化する様子について、図6及び図7を参照しながら説明する。図6は、ディスプレイ37においてトラクタ1の現在位置及び現在の向きと自律走行の開始位置とをアイコンで表示した例を示す図である。図7は、開始位置の表示態様が図6の状態から変化した様子を示す図である。
図6及び図7は、トラクタ1を自律走行の開始に適した位置に移動させるオペレータの運転を支援するために、ディスプレイ37の作業情報領域82に表示される画面の例を示している。
図6に示すように、制御部50は、圃場60及び作業領域61を図形で(グラフィカルに)ディスプレイ37に表示するとともに、更に作業経路63を表示する。作業経路63は、上述したように、オペレータの指示により遠隔操作装置46の作業経路生成部53において生成されたものである。更に、制御部50は、トラクタアイコンF1と、無人スタート領域アイコンF2と、をディスプレイ37に表示する。
本実施形態では、トラクタアイコンF1は、トラクタ1を上から見た様子を簡略化した図形とされている。具体的に説明すると、トラクタアイコンF1は、幅を2段階で異ならせたやや細長い形状の図形(画像)とされており、幅が小さい方がトラクタ1の前部を示す。トラクタアイコンF1は、そのほぼ中心位置が、位置情報取得部56が取得した現在のトラクタ1の位置に対応する位置となるように表示される。また、トラクタアイコンF1は、幅の狭い部分の向きが、方位角取得部57が取得した現在のトラクタ1の向きとなるように表示される。なお、トラクタアイコンF1の大きさは、ディスプレイ37に圃場60等を表示するときの縮尺にかかわらず、一定の大きさでディスプレイ37に表示される。以上の表示態様で、トラクタアイコンF1は、トラクタ1の現在位置及び現在の向きを表す。なお、トラクタアイコンF1の大きさを、作業車両情報取得部51により取得されたトラクタ1の機種に応じて、或いは、トラクタ1の機種及び作業機3のサイズ及び形状に応じて、異なる大きさでディスプレイ37に表示することとしてもよい。
トラクタ1の制御部4は、所定の時間間隔で、当該トラクタ1の現在位置及び現在の向きの情報を遠隔操作装置46に繰り返して送信する。遠隔操作装置46の制御部50は、トラクタアイコンF1がディスプレイ37に表示される位置及び向きを、遠隔操作装置46から受信した最新の情報を反映するように更新する。以上により、オペレータは、トラクタ1の現在位置及び現在の向きをほぼリアルタイムに把握することができる。
無人スタート領域アイコンF2は、トラクタアイコンF1を内部に収めることが可能な大きさの青色の円形とされている。無人スタート領域アイコンF2は、非作業領域62内に配置され、経路開始情報取得部58が取得した作業経路63の始端の位置と対応する位置がその円形内に含まれるように表示される。以上の表示態様で、無人スタート領域アイコンF2は、トラクタ1が自律走行を開始する位置(領域)を表す。
オペレータは、遠隔操作装置46を携帯しつつトラクタ1に搭乗し、ディスプレイ37の表示を見ながら当該トラクタ1を運転して、トラクタ1の位置を作業経路63の始端の位置まで運転する。このとき、オペレータは、トラクタ1が作業経路63の始端の位置に到達したときの向きが作業経路63の始端での向き(始端からトラクタ1を移動させる向き、言い換えれば、経路開始情報取得部58により取得された作業方向)と一致するように、運転経路に留意する。なお、作業経路63の始端からトラクタ1を移動させる向きは、ディスプレイ37に表示される作業経路63の向き(例えば矢印表示)に基づいて容易に理解することができる。
上記の運転に伴って、ディスプレイ37に表示されるトラクタアイコンF1は、無人スタート領域アイコンF2に近づいていく。やがて、トラクタ1の現在位置が作業経路63の始端近傍の領域に入ると、トラクタアイコンF1は、無人スタート領域アイコンF2が示す円形の領域の中に進入し、円形に内包されるように表示される。なお、トラクタ1が作業経路63の始端近傍の領域に位置しているか否かは、トラクタ1の現在位置と作業経路63の始端の位置とを比較し、その相違が所定の閾値以内であるか否かによって判定される。
トラクタ1の現在位置が作業経路63の始端近傍の領域に入っており、かつ、トラクタ1の現在の向きが作業経路63の始端での向きと一致している場合、無人スタート領域アイコンF2は消え、その位置に、無人スタート許可アイコンF3が代わりに表示される。なお、上記の向きの一致は、トラクタ1の向きと作業経路63の始端での向きとを比較し、その相違が所定の閾値以内であるか否かによって判定される。
本実施形態において、無人スタート許可アイコンF3は、図7に示すように、無人スタート領域アイコンF2と形状及び大きさが同じで色が異なる(青色の)円形とされている。なお、図6及び図7においては、図面での表現の都合上、色の違いがハッチングの違いで表現されている。即ち、トラクタ1の現在位置が作業経路63の始端と(所定範囲内で)一致しており、かつ、現在の向きが作業経路63の始端での向きと(所定範囲内で)一致している場合、ディスプレイ37の表示において、トラクタアイコンF1を内包する円形が赤色から青色に変化する。これにより、オペレータは、トラクタ1の現在位置及び現在の向きが自律走行を開始するのに適した状態になっていることを、直感的に理解することができる。
有人スタート位置アイコンF4は、トラクタ1と他のトラクタ(有人トラクタ)1xとにより上述の協調作業を行う場合に、トラクタ1に随伴して農作業を行う他のトラクタ(有人トラクタ)1xを配置すべき位置及び向きを示すものである。有人トラクタの経路は、トラクタ1の作業経路63と同様に、作業経路生成部53の計算により求められる。
有人スタート位置アイコンF4は、トラクタアイコンF1と同様に幅を2段階で異ならせたやや細長い形状の図形とされているが、トラクタアイコンF1と容易に区別できるようにするため、その色がトラクタアイコンF1と異なっている。従って、有人スタート位置アイコンF4の画像は、トラクタアイコンF1の画像とも無人スタート領域アイコンF2の画像とも異なる。更に、トラクタアイコンF1と有人スタート位置アイコンF4とはオペレータにより指定された協調作業させる場合の互いの位置関係に応じて、異なる大きさとすることが可能である。具体的には、トラクタ1の左斜め後方又は右斜め後方を他のトラクタ1xに走行させる場合、オペレータにより指定されたトラクタ1の作業機3の幅とトラクタ1xの作業機3の幅とを比較して、その大きさが異なる場合、何れの作業機3の幅が大きいかを示す態様で、アイコンF1とアイコンF4の大きさを異なる大きさとする。一方、オペレータにより指定されたトラクタ1の作業機3の幅とトラクタ1xの作業機3の幅とを比較して、その大きさが同一である場合、或いは、トラクタ1の真後ろを他のトラクタ1xに走行させる場合は、アイコンF1とアイコンF4の大きさを等しくすることで、双方の作業機3の幅が等しいことを示す。有人スタート位置アイコンF4は、有人トラクタの経路の始端の位置に、当該始端における経路の向き(始端からトラクタ1xを移動させるべき向き)を向くように表示される。以上の表示態様で、有人スタート位置アイコンF4は、トラクタ1に随伴する有人トラクタが走行を開始する位置及び向きを表す。本実施形態においてはトラクタ(有人トラクタ)1xの現在位置等は遠隔操作装置46のディスプレイに表示されないが、オペレータは、有人スタート位置アイコンF4が表示される位置及び向きを目安にして当該トラクタ1xを運転することで、トラクタ1xを協調作業に適した位置及び向きに容易に配置することができる。
次に、図8を参照して、トラクタアイコンF1の表示、及び、無人スタート領域アイコンF2及び無人スタート許可アイコンF3の表示切替処理について詳細に説明する。図8は、ロボットトラクタ1の位置及び向きを自律走行の開始に適した状態とするために運転するオペレータの参考情報として、トラクタアイコンF1等をディスプレイ37に表示する処理を示すフローチャートである。
生成された作業経路63が遠隔操作装置46からトラクタ1側に転送された後、当該作業経路63に沿ってトラクタ1を走行させる旨の指示が遠隔操作装置46に対して行われると、遠隔操作装置46は準備支援モードになり、図8の処理が開始される。最初に、位置情報取得部56及び方位角取得部57が、トラクタ1の現在位置及び現在の向きをそれぞれ取得する(ステップS101)。
次に、制御部50は、ステップS101で得られたトラクタ1の現在位置が、作業経路63の始端と一致しているか否かを判定する(ステップS102)。この作業経路63の始端の位置は、上述したように、経路開始情報取得部58によって取得される。トラクタ1の現在位置が作業経路63の始端と一致しない場合、制御部50はディスプレイ37に、作業経路63の始端の位置に無人スタート領域アイコンF2が表示されるように制御する(ステップS103、図6)。
ステップS102の判断で、トラクタ1の現在位置が作業経路63の始端と一致している場合は、制御部50は、ステップS101で得られたトラクタ1の現在の向きが、作業経路63の始端での向きと一致しているか否かを判定する(ステップS104)。この作業経路63の始端での向きは、上述したように、経路開始情報取得部58によって取得される。トラクタ1の現在の向きが作業経路63の始端での向きと一致しない場合、制御部50はディスプレイ37に、作業経路63の始端位置に無人スタート領域アイコンF2が表示されるように制御する(ステップS103)。
ステップS104の判断で、トラクタ1の現在の向きが作業経路63の始端での向きと一致している場合は、制御部50はディスプレイ37に、作業経路63の始端位置に無人スタート許可アイコンF3が表示されるように制御する(ステップS105、図7)。
ディスプレイ37に無人スタート領域アイコンF2を表示した場合も、無人スタート許可アイコンF3を表示した場合も、その後、制御部50はディスプレイ37において、トラクタ1の現在位置に対応する位置に、トラクタアイコンF1を現在の向きで表示する(ステップS106)。その後、処理はステップS101に戻り、上記の処理が繰り返される。
以上により、オペレータは、トラクタ1が自律走行の開始に適した位置及び向きとなっているかを、ディスプレイ37に表示されるトラクタアイコンF1と無人スタート領域アイコンF2(又は無人スタート許可アイコンF3)との位置関係、及び、無人スタート許可アイコンF3が表示されているか否かに基づいて、容易に確認することができる。
オペレータはトラクタ1に搭乗して、遠隔操作装置46のディスプレイに表示されるトラクタアイコンF1及び無人スタート領域アイコンF2等を参照しながら運転し、トラクタ1の位置及び向きを、作業経路63の始端の位置及び当該始端での向きに合わせた状態で、トラクタ1を停止させる。その後、オペレータはトラクタ1から降車する。この状態で、遠隔操作装置46の作業開始/一時停止ボタン83を操作することで、トラクタ1の自律走行を開始させることができる。
なお、上記の協調作業を行う場合は、オペレータはトラクタ1から降車した後に他のトラクタ1xに搭乗して、遠隔操作装置46のディスプレイ37に表示される有人スタート位置アイコンF4を参照しながら運転し、当該トラクタ1xの位置及び向きを、走行すべき経路の始端の位置及び当該始端での向きに合わせた状態で、トラクタ1xを停止させる。この状態で、遠隔操作装置46の作業開始/一時停止ボタン83を操作することで、トラクタ1の自律走行を開始させることができる。その後、オペレータは、自律走行及び自律作業を行うトラクタ1に随伴するようにトラクタ1xを運転し、互いに協調しながら農作業を行う。
次に、自律走行の開始時に遠隔操作装置46に表示される注意メッセージについて、図9又は図10を参照しながら説明する。図9は、トラクタ1の現在位置が自律走行の開始位置と一致していない状態で自律走行を開始させようとした場合の注意メッセージの表示例を示す図である。図10は、トラクタ1の現在の移動方向が自律走行を開始する方向と一致していない状態で自律走行を開始させようとした場合の注意メッセージの表示例を示す図である。
例えば、トラクタ1の位置が作業経路63の始端と一致しない状態で、オペレータが誤操作等により作業開始/一時停止ボタン83を操作することも考えられる。この場合、遠隔操作装置46は自律走行の開始をトラクタ1の制御部4に送信せず、従って、当該制御部4もトラクタ1の自律走行を開始しない。或いは、遠隔操作装置46は自律走行の開始をトラクタ1の制御部4に送信するものの、トラクタ1の位置が作業経路63の始端と一致していないことを、制御部4が特定して自律走行の開始を行わないこととしてもよい。そして、遠隔操作装置46は、図9に示すように、現在のトラクタ1の位置が作業経路63の始端と一致していない旨の注意メッセージ86aをディスプレイ37に表示させる。
また、トラクタ1の位置が作業経路63の始端と一致していても、その向きが作業経路63の始端での向きと一致しない状態で、オペレータが誤操作等により作業開始/一時停止ボタン83を操作することも考えられる。この場合も上記と同様に、遠隔操作装置46は自律走行の開始をトラクタ1の制御部4に送信せず、従って、当該制御部4もトラクタ1の自律走行を開始しない。或いは、遠隔操作装置46は自律走行の開始をトラクタ1の制御部4に送信するものの、トラクタ1の向きが作業経路63の始端での向きと一致していないことを、制御部4が特定して自律走行の開始を行わないこととしてもよい。そして、遠隔操作装置46は、図10に示すように、現在のトラクタ1の向きが作業経路63の始端での向きと一致していない旨の注意メッセージ86bをディスプレイ37に表示させる。
また、遠隔操作装置46は、作業開始/一時停止ボタン83が操作されたときに、上記のほか、自律走行を開始するのに不適である様々な状況を検出することもできる。このような状況としては、例えば、遠隔操作装置46とトラクタ1との間で無線通信が確立されていない場合、トラクタ1のGNSSの初期化が終了していない又は位置情報が正しくない場合、及び、トラクタ1においてパーキングブレーキ又はフットブレーキが作動している場合等が考えられる。この場合、作業開始/一時停止ボタン83が操作されても、遠隔操作装置46は自律走行を開始する指示をトラクタ1の制御部4側に送信せず、状況を具体的に知らせる注意メッセージをディスプレイ37に表示する。これにより、好ましくない状況で自律走行が開始されるのを防止できるので、作業効率を高めることができる。
以上に説明したように、本実施形態の遠隔操作装置46は、位置情報取得部56と、経路開始情報取得部58と、制御部50と、を備える。位置情報取得部56は、走行機体2の現在位置を示す現在位置情報を取得可能である。経路開始情報取得部58は、走行機体2が走行する作業経路63の開始位置を示す開始位置情報を取得可能である。制御部50は、作業経路63に沿った走行機体2の走行を指示可能である。制御部50は、走行機体2の現在位置と前記開始位置とを、互いに異なる表示態様(即ち、トラクタアイコンF1と無人スタート領域アイコンF2)でディスプレイ37に表示する。
これにより、走行機体2の現在位置と作業経路63の開始位置との位置関係を容易に確認することができる。その結果、走行機体2が走行を開始するために必要な準備作業を円滑に行うことができる。
また、本実施形態の遠隔操作装置46においては、制御部50は、走行機体2の現在位置を示す画像としてトラクタアイコンF1をディスプレイ37に表示する。制御部50は、前記開始位置を示す画像として、トラクタアイコンF1とは異なる無人スタート領域アイコンF2をディスプレイ37に表示する。無人スタート領域アイコンF2は、トラクタアイコンF1を内包可能な一定の領域を有する。
これにより、ディスプレイ37において無人スタート領域アイコンF2の領域にトラクタアイコンF1が入って表示されるか否かを目安にして、走行機体2を作業経路63の開始位置に容易に合わせることができる。
また、本実施形態の遠隔操作装置46は、走行機体2の方位角を取得可能な方位角取得部57を備える。経路開始情報取得部58は、作業経路63の開始位置における走行機体2の移動方向を取得可能である。制御部50は、走行機体2の位置と作業経路63の開始位置との相違が閾値内であり、かつ、走行機体2の方位角と作業経路63の開始位置における移動方向との相違が閾値内である場合、前記開始位置を示す画像として、無人スタート領域アイコンF2に代えて、トラクタアイコンF1及び無人スタート領域アイコンF2のうち何れとも異なる無人スタート許可アイコンF3をディスプレイ37に表示する。
これにより、走行機体2の現在位置及び現在の向きが自律走行を開始するために適した状態であることを直感的に確認することができる。
また、本実施形態の遠隔操作装置46においては、制御部50は、他のトラクタ1xが作業経路63又は他の走行経路を走行する場合に、当該他のトラクタ1xが作業経路63又は他の走行経路において走行を開始する位置(開始位置)を示す情報を取得可能である。制御部50は、他のトラクタ1xの開始位置を示す画像として、トラクタアイコンF1及び無人スタート領域アイコンF2のうち何れとも異なる有人スタート位置アイコンF4をディスプレイ37に表示可能である。
これにより、複数の車両が並走する場合、自身の車両以外の車両についても、ディスプレイ37の表示を参考にして、走行を開始するために適切な位置及び向きとなるように容易に移動させることができる。
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
上記の実施形態においては、トラクタ1の現在位置及び現在の向きが、作業経路63の始端の位置及び始端での向きに一致すると、ディスプレイ37に表示される無人スタート領域アイコンF2が無人スタート許可アイコンF3に変化する。しかし、これに限らず、例えば無人スタート領域アイコンF2を点滅しない状態から点滅する状態に変化させたり、無人スタート領域アイコンF2の大きさや形状を変化させたりすることで、その表示態様を変化させてもよい。また、無人スタート領域アイコンF2と無人スタート許可アイコンF3とは、上記のように色だけが異なる画像とすることに代えて、形状等が全く異なる画像としても良い。
トラクタ1の遠隔操作装置46が、随伴する他のトラクタ(有人トラクタ)1xの制御部と例えば無線通信を行うことにより、当該他のトラクタ1xの現在位置及び現在の向きの情報を取得できるように構成することもできる。この場合、有人トラクタの現在位置及び現在の向きを示すアイコンを遠隔操作装置46のディスプレイに表示させると、有人トラクタの位置及び向きについてもオペレータが容易に確認できるので好ましい。この有人トラクタの位置及び向きを示すアイコンは、トラクタ1と容易に区別できるように、トラクタアイコンF1とは異なる画像とすることが好ましい。また、有人スタート位置アイコンF4を円形等の領域を有する画像とし、有人トラクタの現在位置及び現在の向きが有人トラクタの経路の始点及び当該始点での経路の向きと一致する場合に、表示されるアイコンが有人スタート位置アイコンF4から他の画像に切り換わる(例えば、色違いのアイコンに変化する)ように構成しても良い。
上記の実施形態においては、無人スタート領域アイコンF2は円形の領域を有しているが、領域の形状は円形に限定されず、例えば四角形や六角形等の他の形状で表示してもよい。また、トラクタアイコンF1、無人スタート許可アイコンF3、有人スタート位置アイコンF4についても、例えば三角形等の任意の画像を用いることができる。
上記の実施形態において遠隔操作装置46に備えられた構成は、トラクタ1に備えられる構成とすることもできる。その場合、トラクタ1の動作(走行機体2の動作及び作業機3の動作)を制御するための制御部4と自律走行に関する設定等を制御するための制御部50とを別々に設けてもよいし、制御部50が担っていた機能を制御部4が行うようにしてもよい。
遠隔操作装置46に相当する機能を有する操作装置(即ち、圃場60の取得、作業領域61の取得、作業経路63の生成、トラクタ1の現在位置及び現在の向きの表示、作業経路63の始端の位置の表示、及び自律走行の開始指示等を行うことが可能な操作装置)が、トラクタ1の走行機体2に取外し不能に備えられても良い。この場合、遠隔操作装置46を省略することができる。
上記の実施形態においては、トラクタ1を自律走行させる作業経路63を遠隔操作装置46の作業経路生成部53が生成し、当該作業経路63の情報が(始点の位置等を含めて)遠隔操作装置46の記憶部54に記憶された上で、経路開始情報取得部58が記憶部54から取得した当該始点の位置に基づいて、無人スタート領域アイコンF2の表示位置が定められる。しかしながら、無人スタート領域アイコンF2の表示位置(即ち、自律走行を開始する位置)は、トラクタ1の制御部4側で記憶した開始位置情報に基づいたものであっても良い。例えば、遠隔操作装置46側で作成された作業経路63に基づいて自律走行をいったん開始した後に、作業経路63の途中で、給油等のために自律走行を一時的に中断することがある。この場合、トラクタ1の制御部4は、中断した時点での走行機体2の位置等に基づいて、自律走行を再開するのに適した走行機体2の位置及び向きを計算して、トラクタ1側の図略の記憶部に記憶する。そして、トラクタ1が給油を終えて戻り、オペレータが遠隔操作装置46を操作して自律走行の再開を指示した場合、トラクタ1の制御部4は、記憶していた再開時の位置及び向きの情報を無線により送信し、遠隔操作装置46がこれを受信する。遠隔操作装置46の経路開始情報取得部58は、トラクタ1の制御部4から受信した内容に基づいて、作業を再開するのに適した走行機体2の位置及び向きを取得する。遠隔操作装置46の制御部50は、当該位置に基づいてディスプレイ37に無人スタート領域アイコンF2を表示した上で、図8と同様の処理を行う。これにより、走行機体2が自律走行を再開するために適切な位置及び向きである状態をオペレータが直感的に確認することができるので、自律走行を再開するために必要な準備作業を円滑に行うことができる。このように、走行経路の開始位置は、経路の最初の位置であっても良いし、走行を一時中断して再び開始する場合の開始位置(即ち、経路の途中)であっても良い。