JP6555072B2 - 保護制御装置 - Google Patents
保護制御装置 Download PDFInfo
- Publication number
- JP6555072B2 JP6555072B2 JP2015204866A JP2015204866A JP6555072B2 JP 6555072 B2 JP6555072 B2 JP 6555072B2 JP 2015204866 A JP2015204866 A JP 2015204866A JP 2015204866 A JP2015204866 A JP 2015204866A JP 6555072 B2 JP6555072 B2 JP 6555072B2
- Authority
- JP
- Japan
- Prior art keywords
- collision
- threshold
- bicycle
- low output
- output area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000008859 change Effects 0.000 claims description 6
- 238000001514 detection method Methods 0.000 description 21
- 230000004048 modification Effects 0.000 description 17
- 238000012986 modification Methods 0.000 description 17
- YPJMOVVQKBFRNH-UHFFFAOYSA-N 1-(9-ethylcarbazol-3-yl)-n-(pyridin-2-ylmethyl)methanamine Chemical compound C=1C=C2N(CC)C3=CC=CC=C3C2=CC=1CNCC1=CC=CC=N1 YPJMOVVQKBFRNH-UHFFFAOYSA-N 0.000 description 11
- 238000010586 diagram Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 241001465754 Metazoa Species 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 230000001681 protective effect Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 241000282326 Felis catus Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000003112 inhibitor Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/34—Protecting non-occupants of a vehicle, e.g. pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0136—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to actual contact with an obstacle, e.g. to vehicle deformation, bumper displacement or bumper velocity relative to the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R19/00—Wheel guards; Radiator guards, e.g. grilles; Obstruction removers; Fittings damping bouncing force in collisions
- B60R19/02—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects
- B60R19/48—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds
- B60R19/483—Bumpers, i.e. impact receiving or absorbing members for protecting vehicles or fending off blows from other vehicles or objects combined with, or convertible into, other devices or objects, e.g. bumpers combined with road brushes, bumpers convertible into beds with obstacle sensors of electric or electronic type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/34—Protecting non-occupants of a vehicle, e.g. pedestrians
- B60R2021/343—Protecting non-occupants of a vehicle, e.g. pedestrians using deformable body panel, bodywork or components
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
Description
また、上記目的を達成するための第2の発明は、車両と衝突する人物を保護するための保護デバイスが設けられている車両で用いられ、車両の前端部における他の物体との衝突を検知するための衝突センサの出力値を取得する出力値取得部(F1)と、車両の前方に存在する物体についての情報を取得する物体認識部(F2)と、物体認識部が取得している情報に基づいて、車両と衝突する対象である衝突対象及びその相対位置を特定する衝突対象特定部(F31)と、衝突対象特定部が特定している衝突対象の相対位置に基づいて、車両の前端部において衝突対象が一次衝突する位置である衝突位置を推定する衝突位置取得部(F32)と、出力値取得部が取得した出力値に基づいて保護デバイスの動作を制御する動作判定部(F4)と、を備え、前端部のコーナー部が、前端部のうち、他の部分に比べて衝突センサの出力値が抑制される傾向にある部分である低出力エリアに設定されており、動作判定部は、衝突位置取得部が推定した衝突位置が、低出力エリアとなっている場合には、衝突位置が低出力エリアではない場合よりも小さい出力値で保護デバイスを動作させるとともに、衝突位置推定部が推定した衝突位置が、衝突センサが設けられていない部分である場合には、出力値に変化がなくとも保護デバイスを動作させるように構成されていることを特徴とする。
本実施形態における保護装置制御システム100は、図1に示すように、ECU1、カメラ2、衝突センサ3、及び外部保護装置4を備えている。なお、ECUは、Electronic Control Unitの略である。ECU1は、カメラ2、衝突センサ3、及び外部保護装置4のそれぞれと、車両内に構築されたローカルエリアネットワークを介して接続されている。
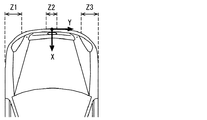
ここでは、図2〜図4を用いて、ROM13に登録されている低出力エリアについて述べる。低出力エリアは、前述の通り、自車両の前端部のうち、他の部分に比べて衝突センサ3の出力値が出にくい部分である。
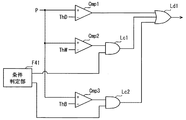
次に、ECU1が備える機能について述べる。ECU1は、CPU11がROM13に格納されている制御プログラムを実行することで実現される機能ブロックとして、図5に示すように、衝突検知部F1、画像認識部F2、衝突対象情報取得部F3、及び、動作判定部F4を備える。また、衝突対象情報取得部F3は、より細かい機能ブロックとして、衝突対象特定部F31、及び、衝突位置取得部F32を備える。なお、ECU1が備える種々の機能ブロックのそれぞれは、一つあるいは複数のIC等によりハードウェア的に実現されてもよい。本実施形態では一例として、動作判定部F4の一部は、ハードウェア的に実現されているものとする。
以上の構成では、衝突位置が低出力エリアとなっていない場合には、衝突センサの出力値Pがデフォルト閾値ThDを超過している場合に、外部保護装置4を動作させる。つまり、デフォルト閾値ThDを動作閾値として採用して、外部保護装置4を動作させるか否かを判定することになる。
衝突対象特定部F31は、衝突対象が乗員付き自転車であると判定している場合には、さらに、画像認識部F2と協働し、自車両に対する当該乗員付き自転車の姿勢に応じた閾値を動作閾値として採用する態様としてもよい(これを変形例1とする)。
上述の実施形態では、衝突位置が低出力エリアである場合に、さらに、歩行者や自転車といった衝突対象の移動体としての種別を考慮して動作閾値を決定する態様を例示したが、これに限らない。例えば、衝突位置が低出力エリアか否かだけに基づいて、動作閾値を選択する態様としてもよい(これを変形例2とする)。
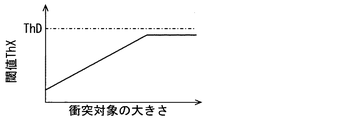
上述の変形例2では、低出力エリア用閾値を固定値とする態様を例示したが、これに限らない。動作判定部F4は画像認識部F2から衝突対象の大きさを示す情報を取得し、低出力エリア用閾値を、衝突対象の大きさに応じた値に動的に調整する態様としてもよい(これを変形例3とする)。衝突対象が大きいほど、衝突の衝撃は大きくなることが期待されるためである。
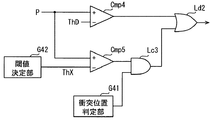
ところで、保護対象とする人物の身長や姿勢、相対位置などによっては、衝突センサ3が衝突を検出することが困難な部分で1次衝突が発生する場合も生じうる。車両の前端部において衝突センサ3が衝突を検出することが困難な部分とは、例えば衝突センサ3が設けられていない部分等であって、具体的には、圧力チャンバ31よりも下方となる部分などである。
以上では、動作判定部F4が備える機能の一部をハードウェア的に実現する態様を例示したが、これに限らない。種々の回路素子に対応する処理は、ソフトウェア的に実現されても良い。また、動作判定部F4が備える機能の一部をソフトウェア的に実現する態様を例示したが、これに限らない。動作判定部F4全体がハードウェア的に実現されてもよい。
Claims (10)
- 車両と衝突する人物を保護するための保護デバイスが設けられている車両で用いられ、
前記車両の前端部における他の物体との衝突を検知するための衝突センサの出力値を取得する出力値取得部(F1)と、
前記車両の前方に存在する物体についての情報を取得する物体認識部(F2)と、
前記物体認識部が取得している情報に基づいて、前記車両と衝突する対象である衝突対象及びその相対位置を特定する衝突対象特定部(F31)と、
前記衝突対象特定部が特定している前記衝突対象の相対位置に基づいて、前記車両の前端部において前記衝突対象が一次衝突する位置である衝突位置を推定する衝突位置取得部(F32)と、
前記出力値取得部が取得した前記出力値が、前記保護デバイスを作動させるための動作閾値よりも大きい値となっている場合に、前記保護デバイスを動作させる動作判定部(F4)と、を備え、
前記前端部のコーナー部が、前記前端部のうち、他の部分に比べて前記衝突センサの出力値が抑制される傾向にある部分である低出力エリアに設定されており、
前記動作判定部は、
前記衝突位置取得部が推定した前記衝突位置が、前記低出力エリアではない場合には、前記動作閾値として所定のデフォルト閾値を採用する一方、
前記衝突位置取得部が推定した前記衝突位置が、前記低出力エリアとなっている場合には、前記デフォルト閾値よりも小さい低出力エリア用閾値を、前記動作閾値として採用するとともに、
前記衝突位置取得部が推定した前記衝突位置が、前記衝突センサが設けられていない部分である場合には、前記出力値に変化がなくとも前記保護デバイスを動作させるように構成されている保護制御装置。 - 車両と衝突する人物を保護するための保護デバイスが設けられている車両で用いられ、
前記車両の前端部における他の物体との衝突を検知するための衝突センサの出力値を取得する出力値取得部(F1)と、
前記車両の前方に存在する物体についての情報を取得する物体認識部(F2)と、
前記物体認識部が取得している情報に基づいて、前記車両と衝突する対象である衝突対象及びその相対位置を特定する衝突対象特定部(F31)と、
前記衝突対象特定部が特定している前記衝突対象の相対位置に基づいて、前記車両の前端部において前記衝突対象が一次衝突する位置である衝突位置を推定する衝突位置取得部(F32)と、
前記出力値取得部が取得した前記出力値に基づいて前記保護デバイスの動作を制御する動作判定部(F4)と、を備え、
前記前端部のコーナー部が、前記前端部のうち、他の部分に比べて前記衝突センサの出力値が抑制される傾向にある部分である低出力エリアに設定されており、
前記動作判定部は、
前記衝突位置取得部が推定した前記衝突位置が、前記低出力エリアとなっている場合には、前記衝突位置が前記低出力エリアではない場合よりも小さい前記出力値で前記保護デバイスを動作させるとともに、
前記衝突位置取得部が推定した前記衝突位置が、前記衝突センサが設けられていない部分である場合には、前記出力値に変化がなくとも前記保護デバイスを動作させるように構成されている保護制御装置。 - 請求項1において、
前記低出力エリア用閾値として、前記衝突対象の移動体としての種別に応じた閾値を備え、
前記衝突対象特定部は、前記物体認識部が取得している情報に基づいて、前記衝突対象の移動体としての種別を判定し、
前記動作判定部は、前記衝突位置が前記低出力エリアである場合には、前記衝突対象の移動体としての種別に応じた閾値を前記動作閾値として採用することを特徴とする保護制御装置。 - 請求項1又は3において、
前記低出力エリア用閾値として、前記低出力エリアに歩行者が衝突した場合を想定した歩行者用閾値を備え、
前記衝突対象特定部は、前記物体認識部が取得している情報に基づいて、前記衝突対象が歩行者であるか否かを判定し、
前記動作判定部は、前記衝突対象が歩行者であって、かつ、前記衝突位置が前記低出力エリアである場合には、前記歩行者用閾値を前記動作閾値として採用することを特徴とする保護制御装置。 - 請求項1、3、及び4の何れか1項において、
前記低出力エリア用閾値として、前記低出力エリアに乗員が乗車している自転車が衝突した場合を想定した自転車用閾値を備え、
前記衝突対象特定部は、前記物体認識部が取得している情報に基づいて、前記衝突対象が、乗員が乗車している自転車である乗員付き自転車であるか否かを判定し、
前記動作判定部は、前記衝突対象が前記乗員付き自転車であって、かつ、前記衝突位置が前記低出力エリアである場合には、前記自転車用閾値を前記動作閾値として採用することを特徴とする保護制御装置。 - 請求項5において、
前記自転車用閾値は、前記低出力エリアに歩行者が衝突した場合を想定して設定される閾値よりも小さい値に設定されていることを特徴とする保護制御装置。 - 請求項5又は6において、
前記自転車用閾値として、
前記低出力エリアにおいて前記乗員付き自転車が、前記車両の進行方向に対して前記乗員付き自転車の進行方向が垂直となる姿勢である横向き姿勢で衝突した場合を想定した横向き用閾値と、
前記低出力エリアにおいて前記乗員付き自転車が、前記車両の進行方向に対して前記乗員付き自転車の進行方向が平行となる姿勢である縦向き姿勢で衝突した場合を想定した閾値であって、前記横向き用閾値よりも小さい縦向き用閾値と、を備え、
前記動作判定部は、
前記衝突対象特定部が特定した前記衝突対象が前記乗員付き自転車である場合には、前記車両に対して前記乗員付き自転車の向きが前記縦向き姿勢となっているか前記横向き姿勢となっているかを判定し、
前記衝突対象としての前記乗員付き自転車が前記横向き姿勢となっている場合には、前記横向き用閾値を前記動作閾値として採用する一方、前記乗員付き自転車が前記縦向き姿勢となっている場合には、前記縦向き用閾値を前記動作閾値として採用することを特徴とする保護制御装置。 - 請求項1において、
前記低出力エリア用閾値は、前記衝突対象の大きさに応じた値が設定されており、
前記衝突対象特定部は、前記物体認識部が取得している情報に基づいて、前記衝突対象の大きさを取得し、
前記動作判定部は、前記衝突対象特定部が取得している前記衝突対象の大きさに応じた前記低出力エリア用閾値を前記動作閾値として採用することを特徴とする保護制御装置。 - 請求項1から8の何れか1項において、
前記前端部において前照灯が配置されている部分、及び、フォグランプが配置されている部分の少なくとも何れか一方が前記低出力エリアに設定されていることを特徴とする保護制御装置。 - 請求項1から9の何れか1項において、
前記衝突センサは、前記前端部において車幅方向に沿って配置されていることを特徴とする保護制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204866A JP6555072B2 (ja) | 2015-10-16 | 2015-10-16 | 保護制御装置 |
| PCT/JP2016/079374 WO2017065045A1 (ja) | 2015-10-16 | 2016-10-04 | 保護制御装置 |
| DE112016004692.8T DE112016004692B4 (de) | 2015-10-16 | 2016-10-04 | Schutzsteuerungsvorrichtung |
| US15/767,963 US20180304849A1 (en) | 2015-10-16 | 2016-10-04 | Protection control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015204866A JP6555072B2 (ja) | 2015-10-16 | 2015-10-16 | 保護制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017074919A JP2017074919A (ja) | 2017-04-20 |
| JP2017074919A5 JP2017074919A5 (ja) | 2017-12-14 |
| JP6555072B2 true JP6555072B2 (ja) | 2019-08-07 |
Family
ID=58517221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015204866A Active JP6555072B2 (ja) | 2015-10-16 | 2015-10-16 | 保護制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20180304849A1 (ja) |
| JP (1) | JP6555072B2 (ja) |
| DE (1) | DE112016004692B4 (ja) |
| WO (1) | WO2017065045A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6802053B2 (ja) * | 2016-12-12 | 2020-12-16 | トヨタ自動車株式会社 | 車両周辺監視装置の搭載構造 |
| JP6749417B2 (ja) * | 2016-12-20 | 2020-09-02 | パイオニア株式会社 | 事故判定装置 |
| JP6690601B2 (ja) | 2017-06-07 | 2020-04-28 | 株式会社デンソー | 保護制御装置 |
| JP6806018B2 (ja) | 2017-09-25 | 2020-12-23 | 株式会社デンソー | 保護制御装置及び保護システム |
| JP6806017B2 (ja) | 2017-09-25 | 2020-12-23 | 株式会社デンソー | 保護制御装置 |
| JP7195219B2 (ja) * | 2019-05-31 | 2022-12-23 | 本田技研工業株式会社 | 衝突予測判定装置、及び交通弱者保護システム |
| JP7125917B2 (ja) * | 2019-05-31 | 2022-08-25 | 本田技研工業株式会社 | 車両用保護装置 |
| KR20210138289A (ko) | 2020-05-12 | 2021-11-19 | 현대모비스 주식회사 | 보행자 보호장치 및 그 제어방법 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004017812A (ja) | 2002-06-17 | 2004-01-22 | Mazda Motor Corp | 車両用衝突保護装置 |
| GB2400353A (en) * | 2003-04-09 | 2004-10-13 | Autoliv Dev | Pedestrian detecting system provided on a motor vehicle |
| KR20040094480A (ko) * | 2003-05-02 | 2004-11-10 | 기아자동차주식회사 | 자동차용 에어백의 전개 제어방법 |
| JP4367088B2 (ja) | 2003-10-29 | 2009-11-18 | 株式会社デンソー | 車両用歩行者判別装置 |
| JP2007118831A (ja) | 2005-10-28 | 2007-05-17 | Denso Corp | 車両用衝突物体判別装置及び歩行者保護装置作動システム |
| JP4434293B2 (ja) * | 2007-07-17 | 2010-03-17 | 株式会社デンソー | 車両用衝突検知装置 |
| JP2010036660A (ja) * | 2008-08-01 | 2010-02-18 | Denso Corp | 車両用衝突保護システム |
| JP4831149B2 (ja) | 2008-09-10 | 2011-12-07 | 株式会社デンソー | 車両用衝突検知装置 |
| JP4873068B2 (ja) * | 2009-11-20 | 2012-02-08 | 株式会社デンソー | 衝突被害軽減装置 |
| US8700257B2 (en) * | 2010-05-13 | 2014-04-15 | Toyota Motor Engineering & Manufacturing North America, Inc. | Control methodology of pedestrian kinematics using the active hood lift system |
| JP5825530B2 (ja) | 2012-11-22 | 2015-12-02 | 株式会社デンソー | 車両用衝突検知装置 |
| JP5907182B2 (ja) * | 2014-01-20 | 2016-04-26 | トヨタ自動車株式会社 | 車両用ポップアップフード装置 |
| JP5949803B2 (ja) * | 2014-02-07 | 2016-07-13 | トヨタ自動車株式会社 | 衝突検出装置 |
| JP6090196B2 (ja) * | 2014-02-10 | 2017-03-08 | トヨタ自動車株式会社 | 歩行者衝突検知センサを備えた車両用バンパ構造 |
| JP6149758B2 (ja) * | 2014-02-21 | 2017-06-21 | トヨタ自動車株式会社 | 歩行者衝突検知システム |
| JP2015204866A (ja) | 2014-04-17 | 2015-11-19 | サミー株式会社 | 遊技機 |
-
2015
- 2015-10-16 JP JP2015204866A patent/JP6555072B2/ja active Active
-
2016
- 2016-10-04 DE DE112016004692.8T patent/DE112016004692B4/de active Active
- 2016-10-04 WO PCT/JP2016/079374 patent/WO2017065045A1/ja active Application Filing
- 2016-10-04 US US15/767,963 patent/US20180304849A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| DE112016004692T5 (de) | 2018-06-28 |
| JP2017074919A (ja) | 2017-04-20 |
| WO2017065045A1 (ja) | 2017-04-20 |
| US20180304849A1 (en) | 2018-10-25 |
| DE112016004692B4 (de) | 2021-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6555072B2 (ja) | 保護制御装置 | |
| JP6337834B2 (ja) | 保護制御装置 | |
| WO2017006532A1 (ja) | 保護制御装置 | |
| US10573180B2 (en) | Vehicle control device and vehicle control method | |
| US9797734B2 (en) | Object recognition apparatus | |
| CN104276121B (zh) | 控制车辆安全参数的系统、车辆和控制安全参数的方法 | |
| EP3041714B1 (en) | System for controlling the deployment of an external safety device | |
| CN109891262B (zh) | 物体探测装置 | |
| CN104709213A (zh) | 用于在大型动物碰撞中保护车辆乘客的设备和方法 | |
| JP2008247111A (ja) | 車両の衝突安全制御システム | |
| JP2012008718A (ja) | 障害物回避装置 | |
| JP2018118615A (ja) | 車両用乗員保護装置及び車両用乗員保護方法 | |
| JP6794972B2 (ja) | 保護制御装置 | |
| JP6409736B2 (ja) | ポップアップ制御装置 | |
| JP2015205640A (ja) | 車両用衝突制御装置 | |
| WO2014171863A1 (en) | System for controlling the deployment of an external safety device | |
| SE1151023A1 (sv) | Förfarande och system för att påverka kollisionskonsekvenser vid ett motorfordon | |
| CN114364578A (zh) | 用于适配个人约束装置的触发算法的方法和用于适配个人约束装置的触发算法的控制装置 | |
| SE1450739A1 (sv) | System for controlling the deployment of an external safetydevice | |
| JP6806018B2 (ja) | 保護制御装置及び保護システム | |
| WO2017138331A1 (ja) | 物体検知装置 | |
| KR101596995B1 (ko) | 차량의 충격완화 방법 | |
| JP7576660B1 (ja) | エアバッグ制御装置 | |
| JP7202790B2 (ja) | 車両用対人保護システム | |
| KR102591195B1 (ko) | 차량 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181120 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190624 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6555072 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |