JP6546395B2 - 3dモデルを作成するためのデータを人から取得するための方法及びシステム - Google Patents
3dモデルを作成するためのデータを人から取得するための方法及びシステム Download PDFInfo
- Publication number
- JP6546395B2 JP6546395B2 JP2014540279A JP2014540279A JP6546395B2 JP 6546395 B2 JP6546395 B2 JP 6546395B2 JP 2014540279 A JP2014540279 A JP 2014540279A JP 2014540279 A JP2014540279 A JP 2014540279A JP 6546395 B2 JP6546395 B2 JP 6546395B2
- Authority
- JP
- Japan
- Prior art keywords
- jaw
- person
- data set
- arch
- lower jaw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- IMHGNFUFJBYBKG-INFAEJQFSA-N CC[C@H](C1)[C@@H](C2)C2C1N Chemical compound CC[C@H](C1)[C@@H](C2)C2C1N IMHGNFUFJBYBKG-INFAEJQFSA-N 0.000 description 1
Images































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C13/00—Dental prostheses; Making same
- A61C13/0003—Making bridge-work, inlays, implants or the like
- A61C13/0004—Computer-assisted sizing or machining of dental prostheses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C19/00—Dental auxiliary appliances
- A61C19/04—Measuring instruments specially adapted for dentistry
- A61C19/05—Measuring instruments specially adapted for dentistry for determining occlusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C9/00—Impression cups, i.e. impression trays; Impression methods
- A61C9/004—Means or methods for taking digitized impressions
- A61C9/0046—Data acquisition means or methods
- A61C9/0053—Optical means or methods, e.g. scanning the teeth by a laser or light beam
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16B—BIOINFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR GENETIC OR PROTEIN-RELATED DATA PROCESSING IN COMPUTATIONAL MOLECULAR BIOLOGY
- G16B5/00—ICT specially adapted for modelling or simulations in systems biology, e.g. gene-regulatory networks, protein interaction networks or metabolic networks
Description
本願は、参照によりその全体を本明細書に援用する、2011年11月15日に出願された米国仮特許出願第61/560,117号の優先権の利益を主張する。
本開示は、一般に構造モデリング用のデータを取得することに関する。より詳細には、本開示は、人の顎及び骨弓のモデルを作成する際に使用するデータを取得することに関する。
患者の顎運動を追跡するために、以前は患者の頭部の3Dモデリングが使用されてきた。Sachdeva等への米国特許第7,717,708号は、歯列矯正治療計画の方法を開示する。患者の共通の頭蓋顔面解剖構造を表す2組以上のデジタルデータが異なる撮像装置から得られる。そのデータセットは、患者の顔の視覚的外観を表すデータ、及び患者の骨弓の3D画像を表すデータを含み得る。前者はカラーデジタルカメラによって得ることができる一方、後者は光学3Dスキャナによって得ることができる。データセットは、患者及び内部構造の面を表すために重ね合わせることができる。ソフトウェアが、頭蓋顔面解剖構造の合成3D表現を表示し、例えば咀嚼中や咬合中の顎などの特徴の解剖学的位置の変化をシミュレートすることができる。その表現を用いて歯列矯正器具を作り出しても良い。
本明細書に開示する一部の実施形態は、3Dモデルを作成する際に有用なデータを取得する従来の方法の少なくとも1つの不利点を回避し又は軽減する。
次に、本開示の実施形態を添付図面を参照して専ら例として説明する。
人によっては、自然な咬合位を定めるのに十分な歯列が無い場合がある。これらの人のうちで、習慣的な咬合位(「習慣的位置」)が徐々に定められる場合がある。習慣的位置が確立される場合、その位置は歯の治療を計画するときの便利な基準点である。その結果、習慣的位置は、歯冠や充填材を用いて1本の歯を修復するための開始点として、更には歯の修復の象限として使用される場合がある。しかし、習慣的位置は必ずしも最適で安定した神経筋咬合ではない。1組の義歯を習慣的位置に基づかせることは、必ずしも頭蓋骨に対する下顎の関係の最適化、最適な顔の美容、又は最適な歯の美しさ(歯形態及び歯構成)を促進しない。
安静位とは、下顎閉鎖の等張経路に沿った(直立姿勢位置における頭部に対する垂直の、前後方向の、及び横方向の)上顎に対する空間内の下顎の位置である。安静位では、下顎を動かす伸筋及び下制筋を含む顎筋系が、最小限の電気的活動を働かせる位置において姿勢保持される。安静位を保つのに必要な顎筋系によるエネルギ消費量は、下顎のヒンジの経路に沿った他の位置に比べて最も小さい。安静位では、人の顆頭が中間的な、抑制されていない位置にある。
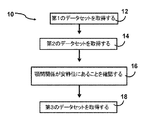
図1は、人からデータを取得する方法10の流れ図である。この方法は、第1のデータセットを取得するステップ12と、第2のデータセットを取得するステップ14と、人の顎間関係が安静位にあることを確認するステップ16と、第3のデータセットを取得するステップ18とを含む。第1のデータセットは、人の上顎骨弓及び下顎骨弓のモデリングを助ける。骨弓は、組織(例えば歯肉組織、軟組織、又は角化組織)及び構造(例えば義歯及び生歯)をそれぞれ含む。骨弓は、歯槽堤(突起又は縁とも呼ばれる)をそれぞれ含む。上顎義歯を有さない上顎の歯の無い人では、上顎骨弓が口蓋及び上顎顎堤だけを含む。下顎義歯を有さない下顎の歯の無い人では、下顎骨弓が下顎顎堤だけを含む。
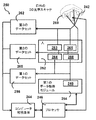
図3は、人52からデータを取得するためのシステム50の概略図である。人52は、上顎63、上顎骨弓64、下顎65、及び下顎骨弓66を有する。システム50は、第1のデータセット56を取得するための第1のデータ取得モジュール54と、第2のデータセット60及び第3のデータセット62を取得するための第2のデータ取得モジュール58とを含む。第1のデータ取得モジュール54の一例、及び第2のデータ取得モジュール58の2つの例を以下に示す。但し、第1のデータセット56、第2のデータセット60、及び第3のデータセット62を取得することができる、例示したもの以外の装置が本明細書に示す例と代替可能である。第2のデータセット60及び第3のデータセット62は、第2のデータ取得モジュール58について示す例の何れかによってそれぞれ取得することができ、単一の第2のデータ取得モジュール58を使用することはシステムの費用を下げることができる。或いは、第2のデータセット60及び第3のデータセット62は、別個の第2のデータ取得モジュール58を用いてそれぞれ取得することができる。第2のデータ取得モジュール58を2つ使用する場合、それぞれの第2のデータ取得モジュール58は同種の装置の一例とすることができ、又はそれぞれの第2のデータ取得モジュール58は異なる装置でも良い。或いは、第1のデータ取得モジュール54及び第2のデータ取得モジュール58の他の例を、本明細書に示す例と組み合わせて、互いに組み合わせて、又はその両方により使用することができる。
図4は、第1のデータ取得モジュールが光学3D口内スキャナ155である、システム150の概略図である。第1のデータセット156を取得するために、口内スキャナ155及び関連ソフトウェアを用いて上顎骨弓164及び下顎骨弓166を走査する。システム150に適した口内スキャナの例には、a.tron3D gmbh bluescan-I(商標)3D intraoral scanner、Planmeca Oy PlanScan(商標)digital impression scanner、Sirona CEREC Omnicam、Slrona CEREC Bluecam、Cadent iTero(商標)digital impression system、及び3M(商標)True Definition Scannerが含まれる。
図7は、第2のデータ取得モジュールが、第2のデータセット260及び第3のデータセット262を取得するために、遠近法による(perspective)口の外側から人の頭部を走査するための3D光学スキャナ259(「口外スキャナ」)である、システム250の概略図である。口外スキャナの例には、Creaform Inc. VlUscan(商標)color laser scanner、Northern Digital Inc. VircaSCAN(商標)handheld 3D laser scanner、及び3D3 Solutions HDI Advance 3D Scannerなどの構造化された白色光撮像スキャナが含まれる。一実施形態では、上顎骨弓264及び下顎骨弓266の印象を取り、その印象を3D光学スキャナ259で走査することにより、第1のデータセット256セットを取得するために、3D光学スキャナ259を使用することができる。印象から模型を作ることができ、3D光学スキャナ259を用いて模型を走査し、第1のデータセット256を取得する。
図12は、第2のデータ取得モジュールが3D超音波スキャナ361である、システム350の概略図である。3D超音波スキャナ361は、第2のデータセット360及び第3のデータセット362を取得するために使用することができる。
人が安静位にあるかどうかを確認する方法は歯科専門家の間で知られており、どんな適切な方法も適用することができる。人に「エマ」と言わせること、噛ませること、自らの下顎を後方に引かせることなどの単純な方法が適している場合がある。安静位における人のモデルを作成するためのデータの取得時期を決定するには、安静位を判定するより客観的且つ再現可能な方法がより適している。習慣的位置と安静位とはしばしば近い場合があるので、安静位を判定するより客観的且つ再現可能な方法が、データの取得時期を決定するのにより適している。
本明細書に開示する方法及びシステムは、現存する如何なる歯科的特徴も欠く(即ち上顎骨弓又は下顎骨弓に歯が無く、上顎骨弓が顎堤及び口蓋だけであり、下顎骨弓が顎堤だけである)人に適用することができる。この方法及びシステムは、人にも適用することができ、現存する歯科的特徴を有し得る。現存する歯科的特徴は義歯によって例示されるが、例えば生歯も含み得る。歯科的特徴が着脱式の義歯である場合、それらの義歯は第2のデータセット及び第3のデータセットの取得中に所定の位置に留まり得る。例えば歯の治療を計画するための3Dモデルを作成するアプリケーションに第2のデータセット及び第3のデータセットを適用するとき、歯科的特徴を明らかにすることができる。
図25は、第1のデータセット、第2のデータセット、及び第3のデータセットから3Dモデルを作成するステップ326を含む、方法310の流れ図である。図26は、第1のデータセット1156、第2のデータセット1160、及び第3のデータセット1162から作成された3Dモデル1172を含む、システム1150の概略図である。3Dモデル1172は、上顎1163、上顎骨弓1164、下顎1165、及び下顎骨弓1166を含む人1152の頭部のモデルである。
図31は、3Dモデルを作成するステップ426に由来する、3Dモデルの操作及び解析428を含む方法410の流れ図である。図32は、3Dモデルの操作及び解析の成果1687を含む、システム1650の概略図である。3Dモデル1672の操作及び解析は、安静位以外の顎間関係を推定すること、及び3Dモデル1672の特徴間の関係を測定することを含み得る。
安静位の経験的データに基づく人の頭部の3Dモデルを使用することにより、義歯を設計する際に存在し得る幾つかの潜在的な誤差要因が回避される:
−顎間空間を露出するために人の唇を動かすこと、
−咬合採得材が注入され、加硫され、硬化される間、一貫した顎間関係を人が保つこと、
−印象を形成するために、或る程度の寸法不安定性を有し得る印象材(例えば石膏、アルギン酸塩、ポリビニルシロキサン、又はポリエーテル)を使用すること、
−加硫し、硬化するときに或る程度の寸法不安定性を招く、縮む石膏と共に歯科用モデルを所定の位置に懸濁させること、及び
−装着中に、例えば咬合採得中に圧縮され得る、人の骨弓上にある咬合堤又は咬合阻止器を使用すること。
実施形態の完全な理解を与えるために、先の説明の中で数多くの詳細を説明目的で記載した。但し、これらの具体的詳細が必須ではないことが当業者に明らかになる。他の例では、理解を不明瞭にしないために、良く知られている電気的構造及び回路をブロック図形式で示している。例えば、本明細書に記載の実施形態をソフトウェアルーチン、ハードウェア回路、ファームウェア、又はそれらの組合せとして実装するのかに関する具体的詳細は示していない。
Claims (61)
- 人の3Dモデルを作成するためのデータを前記人から取得するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の第2のデータセットを取得するステップと、
前記人の顎筋系によるエネルギ使用量のモニター結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認するステップと、
前記顎間関係が前記生理的安静位にあるとき、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の第3のデータセットを取得するステップと
を実行することを含み、
前記顎間関係が前記生理的安静位にあることを確認するステップが、前記顎筋系を疲弊させるステップを含む、方法。 - 前記プロセッサが、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の前記第3のデータセットを取得するステップを更に含み、前記顎間関係が更に前記生理的安静位以外の位置にある、請求項1に記載の方法。
- 前記顎間関係が変化する間、前記第3のデータセットの少なくとも一部がリアルタイムで取得される、請求項2に記載の方法。
- 前記顎間関係が前記生理的安静位にあることを確認するステップが、前記人の顎筋系による前記エネルギ使用量をモニタするステップを含む、請求項1に記載の方法。
- 前記人の顎筋系による前記エネルギ使用量が最小値に達したときに前記第3のデータセットが取得される、請求項4に記載の方法。
- 前記第3のデータセット内にエネルギ使用量が含まれる、請求項4に記載の方法。
- 前記第2のデータセット内にエネルギ使用量が含まれる、請求項4に記載の方法。
- 前記顎筋系によるエネルギ使用量をモニタするステップが、筋電計によって前記顎筋系をモニタするステップを含む、請求項4に記載の方法。
- 前記顎筋系を疲弊させるステップが、疲弊するまで前記顎筋系を刺激するステップを含む、請求項1に記載の方法。
- 疲弊するまで前記顎筋系を刺激するステップが、経皮電気神経刺激により前記顎筋系を刺激するステップを含む、請求項9に記載の方法。
- 3Dモデルを作成するためのデータを人から取得するためのシステムであって、
前記人の上顎骨弓及び前記人の下顎骨弓の第1のデータセットを取得するための第1のセンサを含む第1のモジュールと、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の第2のデータセットを取得するためであり、かつ、前記人の顎間関係が生理的安静位にある場合、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の第3のデータセットを取得するための第2のセンサを含む第2のモジュールと、
前記第1のモジュール及び前記第2のモジュールを制御するために、前記第1のモジュール及び前記第2のモジュールと動作可能に通信するプロセッサと、
前記人の顎筋系のエネルギ使用量をモニタする第3のセンサを含む第3のモジュールと
を含む、システム。 - 前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを記憶するために、前記第1のモジュール、前記第2のモジュール、及び前記プロセッサと動作可能に通信するコンピュータ可読媒体を更に含む、請求項11に記載のシステム。
- 前記第1のモジュールが口内の光学3Dスキャナである、請求項11に記載のシステム。
- 前記第2のモジュールが3D光学スキャナである、請求項11に記載のシステム。
- 前記第2のモジュールが3D超音波スキャナである、請求項11に記載のシステム。
- 前記第3のモジュールが筋電計である、請求項11に記載のシステム。
- 前記第3のモジュールが前記プロセッサと動作可能に通信し、条件が満たされるとき、前記プロセッサが前記第2のモジュールに前記第3のデータセットを取得させるように構成される、請求項11に記載のシステム。
- 前記条件が前記顎筋系による前記エネルギ使用量が最小値に達したことである、請求項17に記載のシステム。
- 前記エネルギ使用量が最小値に達することは、前記顎筋系が疲弊しており前記顎間関係が前記安静位にあることを示す、請求項18に記載のシステム。
- 前記顎筋系による前記エネルギ使用量が最少値に達したことを確認するように前記プロセッサが更に構成される、請求項18に記載のシステム。
- 前記第2のモジュールが、前記第3のデータセットを取得できるデータ取得位置に固定される、請求項18に記載のシステム。
- 前記第2のデータセットが前記データ取得位置から取得されても良く、前記プロセッサが前記第2のモジュールに前記第2のデータセットを取得させるように更に構成される、請求項21に記載のシステム。
- 前記第3のデータセットが前記第3のモジュールによって更に取得される、請求項11に記載のシステム。
- 前記第2のデータセットが前記第3のモジュールによって更に取得される、請求項11に記載のシステム。
- 3Dモデルを作成するためのデータを人から取得するためのシステムであって、
前記人の上顎骨弓及び前記人の下顎骨弓の第1のデータセットを取得するための第1のセンサを含む第1のモジュールと、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の第2のデータセットを取得するためであり、かつ、前記人の顎間関係が生理的安静位にある場合、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の第3のデータセットを取得するための第2のセンサを含む第2のモジュールと、
前記第1のモジュール及び前記第2のモジュールを制御するために、前記第1のモジュール及び前記第2のモジュールと動作可能に通信するプロセッサと、
前記人の顎筋系を疲弊させるための筋肉疲弊モジュールと
を含む、システム。 - 前記第1のモジュール、前記第2のモジュール及び前記プロセッサと動作可能に通信し、前記第1のデータセット、前記第2のデータセット及び前記第3のデータセットを格納するコンピュータ可読媒体を更に含む、請求項25に記載のシステム。
- 前記第1のモジュールが口内の光学3Dスキャナである、請求項25に記載のシステム。
- 前記第2のモジュールが3D光学スキャナである、請求項25に記載のシステム。
- 前記第2のモジュールが3D超音波スキャナである、請求項25に記載のシステム。
- 前記筋肉疲弊モジュールが経皮電気神経刺激モジュールである、請求項25に記載のシステム。
- 前記筋肉疲弊モジュールが、前記筋肉疲弊モジュールからのフィードバックを制御し受け取るための前記プロセッサと動作可能に通信する、請求項25に記載のシステム。
- 3Dモデルを作成するためのデータを人から取得するためのシステムであって、
前記人の上顎骨弓及び前記人の下顎骨弓の第1のデータセットを取得するための第1のセンサを含む第1のモジュールと、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の第2のデータセットを取得するためであり、かつ、前記人の顎間関係が生理的安静位にある場合、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の第3のデータセットを取得するための第2のセンサを含む第2のモジュールと、
前記第1のモジュール及び前記第2のモジュールを制御するために、前記第1のモジュール及び前記第2のモジュールと動作可能に通信するプロセッサと、
前記人の顎筋系のエネルギ使用量をモニタするための第3のセンサを含む第3のモジュールと、
前記顎筋系を疲弊させるための筋肉疲弊モジュールと
を含む、システム。 - 前記第3のモジュールが前記プロセッサと動作可能に通信し、前記顎筋系のエネルギ使用量が、前記顎筋系が疲弊していることを示す最小エネルギ使用量にあるとき、前記プロセッサが前記第2のモジュールに前記第3のデータを取得させるように構成され、前記顎間関係が前記安静位にある、請求項32に記載のシステム。
- 前記筋肉疲弊モジュールが、前記筋肉疲弊モジュールからのフィードバックを制御し受け取るための前記プロセッサと動作可能に通信する、請求項33に記載のシステム。
- 人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の第1のデータセットを取得するための命令と、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の第2のデータセットを取得するための命令と、
前記人の顎間関係が生理的安静位にあることを前記人の顎筋系によるエネルギ使用量のモニター結果に基づいて確認するための命令と、
前記顎間関係が前記生理的安静位にあるときに、前記人の上顎の少なくとも一部分及び前記人の下顎の少なくとも一部分の第3のデータセットを取得するための命令を含むコンピュータ可読媒体であって、
前記顎間関係が前記生理的安静位にあることを確認することが、前記顎筋系を疲弊させることを含む、コンピュータ可読媒体。 - 前記顎間関係が前記生理的安静位以外の位置にあるときに、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の前記第3のデータセットを取得するための命令を更に含む、請求項35に記載のコンピュータ可読媒体。
- 人の頭部の3Dモデルを作成するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系によるエネルギ使用量のモニター結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記頭部の関節運動可能な3Dモデルを描画するステップと
を実行することを含む、方法。 - 人の頭部の中心咬合位置を推定するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系によるエネルギ使用量のモニター結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記頭部の関節運動可能な3Dモデルを描画するステップと、
前記関節運動可能な3Dモデルの顎間関係に関する安静の咬合高径を求め、前記関節運動可能な3Dモデルの下顎を、前記安静の咬合高径から1mmから4mmの間縦に閉じた咬合高径に配置し、推定中心咬合位置をもたらすステップと
を実行することを含む、方法。 - 人用の歯科器具を作成するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系によるエネルギ使用量のモニター結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記人の頭部の関節運動可能な3Dモデルを描画するステップと、
前記関節運動可能な3Dモデルの顎間関係に関する安静の咬合高径を求め、前記関節運動可能な3Dモデルの下顎を、前記安静の咬合高径から1mmから4mmの間縦に閉じた咬合高径に配置し、推定中心咬合位置をもたらすステップと、
前記推定中心咬合位置に基づいて歯科器具を作成するステップと
を実行することを含む、方法。 - 前記歯科器具が義歯である、請求項39に記載の方法。
- 前記義歯が総義歯である、請求項40に記載の方法。
- 人の3Dモデルを作成するためのデータを前記人から取得するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリングを助ける第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記人の下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリングを助ける第2のデータセットを取得するステップと、
前記人の顎筋系が疲弊しているという結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認するステップと、
前記顎間関係が前記生理的安静位にあるとき、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリングを助ける第3のデータセットを取得するステップと
を実行することを含む、方法。 - 前記プロセッサが、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の前記第3のデータセットを取得するステップを更に含み、前記顎間関係が更に前記生理的安静位以外の位置にある、請求項42に記載の方法。
- 前記顎間関係が変化する間、前記第3のデータセットの少なくとも一部がリアルタイムで取得される、請求項43に記載の方法。
- 前記顎間関係が前記生理的安静位にあることを確認するステップが、前記人の顎筋系による前記エネルギ使用量をモニタするステップを含む、請求項42に記載の方法。
- 前記人の顎筋系による前記エネルギ使用量が最小値に達したときに前記第3のデータセットが取得される、請求項45に記載の方法。
- 前記第3のデータセット内にエネルギ使用量が含まれる、請求項45に記載の方法。
- 前記第2のデータセット内にエネルギ使用量が含まれる、請求項45に記載の方法。
- 前記顎筋系によるエネルギ使用量をモニタするステップが、筋電計によって前記顎筋系をモニタするステップを含む、請求項45に記載の方法。
- 前記顎間関係が前記生理的安静位にあることを確認するステップが、前記顎筋系を疲弊させるステップを含む、請求項42に記載の方法。
- 前記顎筋系を疲弊させるステップが、疲弊するまで前記顎筋系を刺激するステップを含む、請求項50に記載の方法。
- 疲弊するまで前記顎筋系を刺激するステップが、経皮電気神経刺激により前記顎筋系を刺激するステップを含む、請求項51に記載の方法。
- 前記顎間関係が前記生理的安静位にあることを確認するステップが、前記顎筋系によるエネルギ使用量をモニタするステップを含む、請求項50に記載の方法。
- 前記人の顎筋系による前記エネルギ使用量が最小値に達したときに前記第3のデータセットが取得される、請求項53に記載の方法。
- 人の顎間関係が生理的安静位にあることを、前記人の顎筋系によるエネルギ使用量のモニター結果を使用した前記人の顎筋系が疲弊しているという結果に基づいて確認し、前記顎間関係が前記生理的安静位にあるときに、前記人の上顎の少なくとも一部分及び前記人の下顎の少なくとも一部分の構造モデリングを助ける第1のデータセットを取得するための命令を含むコンピュータ可読媒体であって、コンピュータ可読媒体。
- 前記上顎の少なくとも一部分及び前記上顎を前記上顎骨弓に関係させるための前記人の上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記人の下顎骨弓の少なくとも一部分の構造モデリングを助ける第2のデータセットを取得するための命令を更に含む、請求項55に記載のコンピュータ可読媒体。
- 人の頭部の3Dモデルを作成するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系が疲弊しているという結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記頭部の関節運動可能な3Dモデルを描画するステップと
を実行することを含む、方法。 - 人の頭部の中心咬合位置を推定するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系が疲弊しているという結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記頭部の関節運動可能な3Dモデルを描画するステップと、
前記関節運動可能な3Dモデルの顎間関係に関する安静の咬合高径を求め、前記関節運動可能な3Dモデルの下顎を、前記安静の咬合高径から1mmから4mmの間縦に閉じた咬合高径に配置し、推定中心咬合位置をもたらすステップと
を実行することを含む、方法。 - 人用の歯科器具を作成するために、プロセッサを含むシステムにおいて実施される方法であって、前記プロセッサが、
前記人の上顎骨弓の少なくとも一部分及び前記人の下顎骨弓の少なくとも一部分の構造モデリング用の第1のデータセットを取得するステップと、
前記人の上顎の少なくとも一部分及び前記上顎を上顎骨弓に関係させるための前記人の前記上顎骨弓の少なくとも一部分の構造モデリング、並びに前記下顎の少なくとも一部分及び前記下顎を前記下顎骨弓に関係させるための前記下顎骨弓の少なくとも一部分の構造モデリング用の第2のデータセットを取得するステップと、
前記人の顎筋系が疲弊しているという結果に基づいて、前記人の顎間関係が生理的安静位にあることを確認し、前記上顎の少なくとも一部分及び前記下顎の少なくとも一部分の構造モデリング用の第3のデータセットを取得するステップであって、前記顎間関係が前記生理的安静位にある、第3のデータセットを取得するステップと、
前記第1のデータセット、前記第2のデータセット、及び前記第3のデータセットを組み合わせて前記生理的安静位にある前記人の頭部の関節運動可能な3Dモデルを描画するステップと、
前記関節運動可能な3Dモデルの顎間関係に関する安静の咬合高径を求め、前記関節運動可能な3Dモデルの下顎を、前記安静の咬合高径から1mmから4mmの間縦に閉じた咬合高径に配置し、推定中心咬合位置をもたらすステップと、
前記推定中心咬合位置に基づいて歯科器具を作成するステップと
を実行することを含む、方法。 - 前記歯科器具が義歯である、請求項59に記載の方法。
- 前記義歯が総義歯である、請求項60に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161560117P | 2011-11-15 | 2011-11-15 | |
| US61/560,117 | 2011-11-15 | ||
| PCT/CA2012/050811 WO2013071435A1 (en) | 2011-11-15 | 2012-11-15 | Method and system for acquiring data from an individual for preparing a 3d model |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019025824A Division JP6775621B2 (ja) | 2011-11-15 | 2019-02-15 | 3dモデルを作成するためのデータを人から取得するための方法及びシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015501663A JP2015501663A (ja) | 2015-01-19 |
| JP2015501663A5 JP2015501663A5 (ja) | 2016-01-07 |
| JP6546395B2 true JP6546395B2 (ja) | 2019-07-17 |
Family
ID=48428899
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014540279A Active JP6546395B2 (ja) | 2011-11-15 | 2012-11-15 | 3dモデルを作成するためのデータを人から取得するための方法及びシステム |
| JP2019025824A Active JP6775621B2 (ja) | 2011-11-15 | 2019-02-15 | 3dモデルを作成するためのデータを人から取得するための方法及びシステム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019025824A Active JP6775621B2 (ja) | 2011-11-15 | 2019-02-15 | 3dモデルを作成するためのデータを人から取得するための方法及びシステム |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US20140372084A1 (ja) |
| EP (2) | EP3348229B1 (ja) |
| JP (2) | JP6546395B2 (ja) |
| KR (1) | KR101975626B1 (ja) |
| CN (1) | CN104039266B (ja) |
| AU (1) | AU2012339539B2 (ja) |
| CA (1) | CA2855645C (ja) |
| ES (1) | ES2669210T3 (ja) |
| HK (1) | HK1202406A1 (ja) |
| WO (1) | WO2013071435A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5676325B2 (ja) * | 2010-08-10 | 2015-02-25 | 伊藤 秀文 | 情報処理装置、情報処理方法、及びプログラム |
| KR20160100367A (ko) * | 2013-12-19 | 2016-08-23 | 트리스페라 덴탈 아이엔씨. | 무치악 사람의 교합을 레코드하기 위한 방법 및 시스템 |
| WO2015123759A1 (en) | 2014-02-21 | 2015-08-27 | Trispera Dental Inc. | Augmented reality dental design method and system |
| EP3139855B1 (en) | 2014-05-09 | 2021-11-03 | 3Shape A/S | Scanning of edentulous patients |
| CN105224764B (zh) * | 2015-10-22 | 2019-01-29 | 上海理工大学 | 骨骼建模与仿真方法 |
| CN107349021B (zh) * | 2016-05-10 | 2019-06-04 | 无锡时代天使医疗器械科技有限公司 | 基于热压膜成型工艺的壳状牙科器械制作工艺的压膜角度优化方法 |
| EP3471658B1 (en) * | 2016-06-21 | 2020-08-05 | Clearcorrect Operating, LLC | System and method for maximum intercuspation articulation |
| US10304190B2 (en) * | 2016-06-29 | 2019-05-28 | 3M Innovative Properties Company | Virtual model of articulation from intra-oral scans |
| CN108968911A (zh) * | 2017-05-31 | 2018-12-11 | 三纬国际立体列印科技股份有限公司 | 自动口腔扫描机 |
| US11033361B2 (en) * | 2017-10-19 | 2021-06-15 | Ormco Corporation | Methods for orthodontic treatment planning with augmented visual analysis |
| CN108852291B (zh) * | 2018-05-11 | 2021-03-23 | 漯河医学高等专科学校 | 一种手持式口腔三维扫描装置及扫描方法 |
| CN109589180B (zh) * | 2018-11-15 | 2020-12-01 | 浙江中医药大学 | 一种静止状态下记录咬合关系的方法 |
| US11776116B1 (en) * | 2019-04-17 | 2023-10-03 | Terrence J. Kepner | System and method of high precision anatomical measurements of features of living organisms including visible contoured shapes |
| JP6788291B1 (ja) | 2019-06-03 | 2020-11-25 | 株式会社イクシス | 点検支援システム |
| KR20210088946A (ko) * | 2020-01-07 | 2021-07-15 | 주식회사 메디트 | 데이터 정합을 통한 3차원 모델 생성 장치 및 방법 |
| EP4018965B1 (en) * | 2020-12-24 | 2023-12-27 | Lastruttura S.p.A. | Method for determining the normal static and dynamic intramaxillary ratios of a patient |
| KR102623248B1 (ko) * | 2021-03-05 | 2024-01-10 | 주식회사 메디트 | 데이터 처리 방법 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2067976U (zh) * | 1990-06-18 | 1990-12-26 | 石家庄铁路分局石家庄铁路医院 | 正中位测定仪 |
| JP3469268B2 (ja) * | 1993-03-16 | 2003-11-25 | 有限会社デンタルシンクタンク | 下顎位計測・表示方法 |
| US6152731A (en) * | 1997-09-22 | 2000-11-28 | 3M Innovative Properties Company | Methods for use in dental articulation |
| US7234937B2 (en) * | 1999-11-30 | 2007-06-26 | Orametrix, Inc. | Unified workstation for virtual craniofacial diagnosis, treatment planning and therapeutics |
| EP1301140B2 (en) * | 2000-04-19 | 2017-07-05 | OraMetrix, Inc. | Bending machine for a medical device |
| US9421074B2 (en) * | 2001-04-13 | 2016-08-23 | Orametrix, Inc. | Unified three dimensional virtual craniofacial and dentition model and uses thereof |
| US7717708B2 (en) | 2001-04-13 | 2010-05-18 | Orametrix, Inc. | Method and system for integrated orthodontic treatment planning using unified workstation |
| US8021147B2 (en) * | 2001-04-13 | 2011-09-20 | Orametrix, Inc. | Method and system for comprehensive evaluation of orthodontic care using unified workstation |
| US7362890B2 (en) * | 2001-05-24 | 2008-04-22 | Astra Tech Inc. | Registration of 3-D imaging of 3-D objects |
| MXPA05003936A (es) * | 2002-10-15 | 2005-06-17 | Allergan Inc | Terapias y procedimientos odontologicos con toxina botulinica. |
| US9642685B2 (en) * | 2003-07-17 | 2017-05-09 | Pentron Clinical Technologies, Llc | Digital technologies for planning and carrying out dental restorative procedures |
| US7474932B2 (en) * | 2003-10-23 | 2009-01-06 | Technest Holdings, Inc. | Dental computer-aided design (CAD) methods and systems |
| JP4365764B2 (ja) * | 2004-10-18 | 2009-11-18 | アイチ・マイクロ・インテリジェント株式会社 | 顎位置測定装置、センサユニット、及び顎位置測定方法 |
| WO2006092800A2 (en) * | 2005-03-03 | 2006-09-08 | Cadent Ltd. | System and method for scanning an intraoral cavity |
| CN1833617A (zh) * | 2006-04-13 | 2006-09-20 | 上海交通大学 | 计算机辅助生成定位板的制作方法 |
| CN100569195C (zh) * | 2006-09-15 | 2009-12-16 | 李晓峰 | 可描述牙齿咬合关系的精细个性化头颅模型的制造方法 |
| BRPI0720906B8 (pt) * | 2007-01-10 | 2021-06-22 | Nobel Biocare Services Ag | método e sistema para planejar um procedimento restaurativo dental e sistema de computador para realizar o método |
| GB0707454D0 (en) * | 2007-04-18 | 2007-05-23 | Materialise Dental Nv | Computer-assisted creation of a custom tooth set-up using facial analysis |
| US20100124731A1 (en) * | 2008-11-18 | 2010-05-20 | Ibur, Llc | Dental device and method for linking physical and digital data for diagnostic, treatment planning, patient education, communication, manufacturing, and data transfer purposes |
| JP5495415B2 (ja) * | 2008-12-16 | 2014-05-21 | 株式会社吉田製作所 | 下顎前歯部運動追尾システム、下顎前歯部運動追尾装置および顎関節雑音分析装置 |
| KR101707910B1 (ko) * | 2010-01-15 | 2017-02-17 | 얼라인 테크널러지, 인크. | 치과 임플란트 관련 시술에 유용한 방법, 시스템 및 액세서리 |
| DK3583910T3 (da) * | 2010-02-25 | 2022-09-05 | 3Shape As | Dynamisk virtuel artikulator |
| JP2011177451A (ja) * | 2010-03-03 | 2011-09-15 | Gc Corp | 歯科診断システム及び歯科治療システム |
| DE102010036436A1 (de) * | 2010-03-29 | 2011-09-29 | Degudent Gmbh | Verfahren und Anordnung zum Bilden eines Dentalmodells |
| US9872745B2 (en) * | 2012-02-14 | 2018-01-23 | 3Shape A/S | Modeling a digital design of a denture |
| EP2908767B1 (en) * | 2012-10-18 | 2018-12-05 | 3Shape A/S | System and method of designing a dental component |
-
2012
- 2012-11-15 AU AU2012339539A patent/AU2012339539B2/en not_active Ceased
- 2012-11-15 CA CA2855645A patent/CA2855645C/en active Active
- 2012-11-15 JP JP2014540279A patent/JP6546395B2/ja active Active
- 2012-11-15 ES ES12850614.4T patent/ES2669210T3/es active Active
- 2012-11-15 EP EP18156358.6A patent/EP3348229B1/en active Active
- 2012-11-15 EP EP12850614.4A patent/EP2779939B1/en active Active
- 2012-11-15 US US14/356,582 patent/US20140372084A1/en not_active Abandoned
- 2012-11-15 WO PCT/CA2012/050811 patent/WO2013071435A1/en active Application Filing
- 2012-11-15 CN CN201280061791.8A patent/CN104039266B/zh active Active
- 2012-11-15 KR KR1020147016347A patent/KR101975626B1/ko active IP Right Grant
-
2015
- 2015-03-19 HK HK15102836.7A patent/HK1202406A1/xx unknown
-
2019
- 2019-02-15 JP JP2019025824A patent/JP6775621B2/ja active Active
-
2021
- 2021-09-30 US US17/489,825 patent/US20220015878A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019103834A (ja) | 2019-06-27 |
| AU2012339539B2 (en) | 2017-07-06 |
| CA2855645A1 (en) | 2013-05-23 |
| US20140372084A1 (en) | 2014-12-18 |
| WO2013071435A1 (en) | 2013-05-23 |
| EP2779939B1 (en) | 2018-02-14 |
| CN104039266A (zh) | 2014-09-10 |
| JP2015501663A (ja) | 2015-01-19 |
| CN104039266B (zh) | 2016-11-09 |
| EP3348229A1 (en) | 2018-07-18 |
| EP2779939A4 (en) | 2015-12-30 |
| HK1202406A1 (en) | 2015-10-02 |
| KR101975626B1 (ko) | 2019-05-07 |
| KR20140105473A (ko) | 2014-09-01 |
| CA2855645C (en) | 2020-06-23 |
| US20220015878A1 (en) | 2022-01-20 |
| EP3348229B1 (en) | 2020-03-11 |
| EP2779939A1 (en) | 2014-09-24 |
| ES2669210T3 (es) | 2018-05-24 |
| AU2012339539A1 (en) | 2014-07-03 |
| JP6775621B2 (ja) | 2020-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6775621B2 (ja) | 3dモデルを作成するためのデータを人から取得するための方法及びシステム | |
| CN111315316B (zh) | 设计牙科修复体时用于模拟咬合的动态虚拟咬合器的使用方法及其数据载体 | |
| US11772331B2 (en) | System and method for producing dental solutions incorporating a guidance package | |
| JP4468871B2 (ja) | 歯科診療支援方法及びシステム | |
| WO2012140021A2 (en) | Modeling and manufacturing orthodontic appliances | |
| CA2761914A1 (en) | Method and apparatus for preparing denture | |
| CN113412098B (zh) | 数字三维牙齿模型牙科系统 | |
| ES2962213T3 (es) | Procedimiento de animación de modelos de las arcadas mandibular y maxilar de un paciente en una relación intermaxilar corregida | |
| Donitza | Creating the perfect smile: prosthetic considerations and procedures for optimal dentofacial esthetics | |
| Khan et al. | Frequency of gingival display during smiling and comparison of biometric measurements in subjects with and without gingival display | |
| KR101862820B1 (ko) | 틀니 제조방법 | |
| Lauren et al. | 4D clinical imaging for dynamic CAD | |
| Bassetti | The Vertical Dimension in prosthesis and orthognathodontics: Integration between function and aesthetics | |
| Levine et al. | Esthetic diagnosis: a three-step analysis | |
| JP6341842B2 (ja) | 咬合2平面の決定方法およびそのプログラム | |
| Ré et al. | Reconstruction of the curve of Spee | |
| Daccache et al. | Effect of stabilization of patients on the accuracy and scanning time of maxillary dentate quadrants: A clinical study | |
| Azeez | Digital versus Conventional Impression in Complete Denture | |
| EP3216010A1 (en) | Three dimensional imaging of the motion of teeth and jaws | |
| Ali | Treatment Options for Patients with Loss of vertical Dimension | |
| CN116269850A (zh) | 一种自动化排牙方法、装置、设备及存储介质 | |
| CHOUKSEY et al. | PROSTHODONTICS: ACHIEVING QUALITY ESTHETIC DENTISTRY AND INTEGRATED COMPREHENSIVE CARE | |
| Negm et al. | Reliability of CBCT digital models in measurement of the curve of Spee | |
| Lauren et al. | Research Article 4D Clinical Imaging for Dynamic CAD | |
| Mark et al. | 4D Clinical Imaging for Dynamic CAD |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170606 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180531 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20181015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190215 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20190423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190603 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190621 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6546395 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |