JP6472189B2 - インプリント装置、インプリント方法及び物品の製造方法 - Google Patents
インプリント装置、インプリント方法及び物品の製造方法 Download PDFInfo
- Publication number
- JP6472189B2 JP6472189B2 JP2014165198A JP2014165198A JP6472189B2 JP 6472189 B2 JP6472189 B2 JP 6472189B2 JP 2014165198 A JP2014165198 A JP 2014165198A JP 2014165198 A JP2014165198 A JP 2014165198A JP 6472189 B2 JP6472189 B2 JP 6472189B2
- Authority
- JP
- Japan
- Prior art keywords
- mold
- substrate
- pattern
- imprint
- imprint material
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/0002—Lithographic processes using patterning methods other than those involving the exposure to radiation, e.g. by stamping
Description
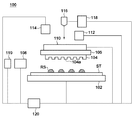
図1、図2及び図3は、本発明の一側面としてのインプリント装置100の構成を示す概略図である。インプリント装置100は、基板上のインプリント材をモールドで成形して基板上にパターンを形成するインプリント処理を行うリソグラフィ装置である。インプリント装置100は、インプリント材として樹脂を採用し、樹脂硬化法として紫外線の照射によって樹脂を硬化させる光硬化法を採用する。
Wsf1=|Wfl1−Wfr1|
Wsf2=|(Wfl1+Wfl2)−(Wfr1+Wfr2)|
Wsf3=|(Wfl1+Wfl2+Wfl3)−(Wfr1+Wfr2+Wfr3)|
ショット領域FFの重心位置BPから各干渉縞の上下の端点の縦方向の距離差Hsf1、Hsf2及びHsf3は、以下の式で求められる。
Hsf1=|Hfu1−Hfd1|
Hsf2=|(Hfu1+Hfu2)−(Hfd1+Hfd2)|
Hsf3=|(Hfu1+Hfu2+Hfu3)−(Hfd1+Hfd2+Hfd3)|
同様に、ショット領域PFの重心位置BPから各干渉縞の左右の端点の横方向の距離差Wsp1、Wsp2及びWsp3は、以下の式で求められる。
Wsp1=|Wpl1−Wpr1|
Wsp2=|(Wpl1+Wpl2)−(Wpr1+Wpr2)|
Wsp3=|(Wpl1+Wpl2+Wpl3)−(Wpr1+Wpr2+Wpr3)|
ショット領域PFの重心位置BPから各干渉縞の上下の端点の縦方向の距離差Hsp1、Hsp2及びHsp3は、以下の式で求められる。
Hsp1=|Hpu1−Hpd1|
Hsp2=|(Hpu1+Hpu2)−(Hpd1+Hpd2)|
Hsp3=|(Hpu1+Hpu2+Hpu3)−(Hpd1+Hpd2+Hpd3)|
但し、図6(a)及び図6(b)では、ショット領域FF及びFPのいずれにおいても、干渉パターンが3つの干渉縞を含んでいるが、干渉縞の数は限定されるものではない。干渉パターに含まれる全ての干渉縞に対して、各干渉縞の左右の端点の横方向の距離差及び各干渉縞の上下の端点の縦方向の距離差を求めるべきである。
処理部118は、モールド104と樹脂RSとの剥離状態に関する情報として、基板上の硬化した樹脂RSからモールド104が剥離するまでに要した時間(剥離時間)を求めてもよい。検出部116は、基板上の硬化した樹脂RSからモールド104を剥離している間において複数の干渉パターンを検出する。従って、処理部118は、移動部110によるモールド104の上方向への移動を開始したときを開始時刻、検出部116によって干渉パターンが検出されなくなったときを終了時刻として特定し、その間の時間を剥離時間として求めることができる。
処理部118は、モールド104と樹脂RSとの剥離状態に関する情報として、基板上の硬化した樹脂RSからモールド104が剥離するときに要する力(離型力)を求めてもよい。基板上の硬化した樹脂RSからモールド104が剥離する際に検出される干渉パターンは、上述したように、モールド104が変形することでモールド104と基板STとの間に生じるギャップによって発生する。従って、干渉パターンに含まれる干渉縞の間隔は、モールド104と基板STとの間のギャップの変化量を表し、更には、モールド104の変形量を表している。
第1乃至第3の実施形態では、処理部118は、検出部116によって検出された干渉パターンに基づいて、モールド104と樹脂RSとの剥離状態に関する情報を求めている。但し、処理部118は、検出部116によって検出された干渉パターンと、基準となる基準干渉パターンとを比較することで、モールド104と樹脂RSとの剥離状態に関する情報を求めてもよい。基準干渉パターンは、例えば、基板上の硬化した樹脂RSからモールド104が正常に剥離されたときに得られる干渉パターンである。また、基準干渉パターンは、これまでのインプリント処理で検出部116によって検出された干渉パターンであってもよい。
第1乃至第4の実施形態では、処理部118は、モールド104と樹脂RSとの剥離状態に関する情報として、1つの情報(モールド104の変形量、剥離時間、剥離位置、離型力など)を求めている。但し、処理部118は、これらの情報の全て、或いは、これらの情報のうち幾つかの情報を求めてもよい。この場合、制御部120は、処理部118によって求められたモールド104と樹脂RSとの剥離状態に関する複数の情報のそれぞれについて、基板上の硬化した樹脂RSからモールド104が正常に剥離されたかを評価する。そして、かかる複数の情報のうち1つでもモールド104が正常に剥離されていないと評価した場合には、制御部120は、基板STの次のショット領域に対するインプリント処理を停止する。この際、制御部120は、基板上の硬化した樹脂RSからモールド104が正常に剥離されていない旨をアラームなどで通知してもよい。また、制御部120は、モールド104のパターン面104aに対する界面活性剤の塗布が不十分であると評価して、塗布部119によってモールド104のパターン面104aに界面活性剤を塗布してもよい。なお、制御部120は、基板STの次のショット領域に対するインプリント処理を停止することなく、モールド104の移動速度を変更してもよい。
物品としてのデバイス(半導体デバイス、磁気記憶媒体、液晶表示素子等)の製造方法について説明する。かかる製造方法は、インプリント装置100を用いてパターンを基板(ウエハ、ガラスプレート、フィルム状基板等)に形成する工程を含む。かかる製造方法は、パターンを形成された基板を処理する工程を更に含む。当該処理ステップは、当該パターンの残膜を除去するステップを含みうる。また、当該パターンをマスクとして基板をエッチングするステップなどの周知の他のステップを含みうる。本実施形態における物品の製造方法は、従来に比べて、物品の性能、品質、生産性及び生産コストの少なくとも1つにおいて有利である。
Claims (11)
- 基板上にモールドを用いてインプリント材のパターンを形成するインプリント装置であって、
前記インプリント材を硬化させる硬化部と、
前記モールドと前記基板とを相対的に移動させる移動部と、
前記モールドで反射された光と前記基板で反射された光のパターンを検出する検出部と、
前記移動部によって前記モールドと前記基板との間隔を広げることで前記基板上の硬化したインプリント材から前記モールドを剥離している間において前記検出部によって検出されたパターンに基づいて、前記モールドと前記インプリント材との剥離状態に関する情報を求める処理部と、
を有し、
前記検出部は、前記光のパターンに含まれる複数の干渉縞を検出し、
前記処理部は、前記情報として、前記複数の干渉縞の間隔に基づいて、前記基板上の硬化したインプリント材から前記モールドを剥離している間における前記モールドの変形量を求めることを特徴とするインプリント装置。 - 前記処理部は、前記複数の干渉縞の間隔に基づいて、前記基板上の硬化したインプリント材から前記モールドを剥離している間における前記基板と前記モールドとの傾きを求めることを特徴とする請求項1に記載のインプリント装置。
- 前記処理部によって求められた前記情報に基づいて、前記基板上の硬化したインプリント材から前記モールドが正常に剥離されたかどうかを評価する制御部を更に有することを特徴とする請求項1又は2に記載のインプリント装置。
- 前記処理部は、前記複数の干渉縞の間隔に基づいて、前記モールドのパターン面に界面活性剤が均一に塗布されたかどうかを評価する制御部を更に有することを特徴とする請求項1又は2に記載のインプリント装置。
- 前記制御部は、前記基板上の硬化したインプリント材から前記モールドが正常に剥離されていないと評価した場合に、前記検出部によって検出されたパターンと前記基板の基準位置とのずれに基づいて、前記基板と前記モールドとの傾きを補正することを特徴とする請求項3に記載のインプリント装置。
- 前記制御部は、前記基板上の硬化したインプリント材から前記モールドが正常に剥離されていないと評価した場合に、前記検出部によって検出されたパターンに含まれる干渉縞の間隔に基づいて、前記基板上の硬化したインプリント材から前記モールドを剥離するときの速度を補正することを特徴とする請求項3に記載のインプリント装置。
- 前記制御部は、前記基板上の硬化したインプリント材から前記モールドが正常に剥離されていないと評価した場合に、前記基板の次のショット領域に前記モールドを用いてインプリント材のパターンを形成する処理を停止することを特徴とする請求項3に記載のインプリント装置。
- 前記制御部によって前記基板上の硬化したインプリント材から前記モールドが正常に剥離されていないと評価された場合に、前記モールドのパターン面に界面活性剤を塗布する塗布部を更に有することを特徴とする請求項7に記載のインプリント装置。
- 前記制御部は、前記基板上の硬化したインプリント材から前記モールドが正常に剥離していないと評価した場合に、前記基板の次のショット領域に前記モールドを用いてインプリント材のパターンを形成する処理において、前記移動部によって前記モールドと前記基板とを相対的に移動させるときの移動速度を、前記モールドが正常に剥離されていないときの移動速度よりも遅くすることを特徴とする請求項3に記載のインプリント装置。
- 基板上にモールドを用いてインプリント材のパターンを形成するインプリント方法であって、
前記モールドと前記基板との間隔を広げることで前記基板上の硬化したインプリント材から前記モールドを剥離させる工程と、
前記剥離させる工程において、前記モールドで反射された光と前記基板で反射された光のパターンに含まれる複数の干渉縞を検出する工程と、
前記複数の干渉縞の間隔に基づいて、前記基板上の硬化したインプリント材から前記モールドを剥離している間における前記モールドの変形を求める工程と、
を有することを特徴とするインプリント方法。 - 請求項1乃至9のうちいずれか1項に記載のインプリント装置を用いて基板上にパターンを形成する工程と、
前記工程で前記パターンを形成された前記基板を加工する加工工程と、
を有し、前記加工工程により加工された前記基板から物品を製造することを特徴とする物品の製造方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014165198A JP6472189B2 (ja) | 2014-08-14 | 2014-08-14 | インプリント装置、インプリント方法及び物品の製造方法 |
| CN201510490307.9A CN106200260B (zh) | 2014-08-14 | 2015-08-11 | 压印装置及物品的制造方法 |
| US14/824,325 US10514599B2 (en) | 2014-08-14 | 2015-08-12 | Imprint apparatus and method of manufacturing article |
| KR1020150114433A KR101940365B1 (ko) | 2014-08-14 | 2015-08-13 | 임프린트 장치 및 물품 제조 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014165198A JP6472189B2 (ja) | 2014-08-14 | 2014-08-14 | インプリント装置、インプリント方法及び物品の製造方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016042501A JP2016042501A (ja) | 2016-03-31 |
| JP2016042501A5 JP2016042501A5 (ja) | 2017-09-07 |
| JP6472189B2 true JP6472189B2 (ja) | 2019-02-20 |
Family
ID=55301500
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014165198A Active JP6472189B2 (ja) | 2014-08-14 | 2014-08-14 | インプリント装置、インプリント方法及び物品の製造方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10514599B2 (ja) |
| JP (1) | JP6472189B2 (ja) |
| KR (1) | KR101940365B1 (ja) |
| CN (1) | CN106200260B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6659104B2 (ja) * | 2014-11-11 | 2020-03-04 | キヤノン株式会社 | インプリント方法、インプリント装置、型、および物品の製造方法 |
| JP6700936B2 (ja) * | 2016-04-25 | 2020-05-27 | キヤノン株式会社 | インプリント装置、インプリント方法、および物品の製造方法 |
| JP6762853B2 (ja) * | 2016-11-11 | 2020-09-30 | キヤノン株式会社 | 装置、方法、及び物品製造方法 |
| JP7150535B2 (ja) * | 2018-09-13 | 2022-10-11 | キヤノン株式会社 | 平坦化装置、平坦化方法及び物品の製造方法 |
| JP7431694B2 (ja) | 2020-07-28 | 2024-02-15 | キヤノン株式会社 | 情報処理装置、膜形成装置、物品の製造方法、およびプログラム |
| JP7361831B2 (ja) * | 2021-07-30 | 2023-10-16 | キヤノン株式会社 | 情報処理装置、成形装置、成形方法及び物品の製造方法 |
| TW202319213A (zh) * | 2021-07-30 | 2023-05-16 | 日商佳能股份有限公司 | 資訊處理設備、成型設備、成型方法及物品製造方法 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7060774B2 (en) * | 2002-02-28 | 2006-06-13 | Merck Patent Gesellschaft | Prepolymer material, polymer material, imprinting process and their use |
| US6871558B2 (en) * | 2002-12-12 | 2005-03-29 | Molecular Imprints, Inc. | Method for determining characteristics of substrate employing fluid geometries |
| US7157036B2 (en) | 2003-06-17 | 2007-01-02 | Molecular Imprints, Inc | Method to reduce adhesion between a conformable region and a pattern of a mold |
| JP4217551B2 (ja) * | 2003-07-02 | 2009-02-04 | キヤノン株式会社 | 微細加工方法及び微細加工装置 |
| JP4721393B2 (ja) * | 2003-08-15 | 2011-07-13 | キヤノン株式会社 | 近接場露光方法 |
| CN102360162B (zh) | 2007-02-06 | 2015-08-26 | 佳能株式会社 | 刻印方法和刻印装置 |
| US7914717B2 (en) * | 2007-04-19 | 2011-03-29 | Konica Minolta Holdings, Inc. | Molding device with releasing mechanism and method for controlling the same |
| US8945444B2 (en) * | 2007-12-04 | 2015-02-03 | Canon Nanotechnologies, Inc. | High throughput imprint based on contact line motion tracking control |
| JP5517423B2 (ja) | 2008-08-26 | 2014-06-11 | キヤノン株式会社 | インプリント装置及びインプリント方法 |
| US8652393B2 (en) * | 2008-10-24 | 2014-02-18 | Molecular Imprints, Inc. | Strain and kinetics control during separation phase of imprint process |
| US8309008B2 (en) * | 2008-10-30 | 2012-11-13 | Molecular Imprints, Inc. | Separation in an imprint lithography process |
| JP5173944B2 (ja) | 2009-06-16 | 2013-04-03 | キヤノン株式会社 | インプリント装置及び物品の製造方法 |
| JP5669377B2 (ja) * | 2009-11-09 | 2015-02-12 | キヤノン株式会社 | インプリント装置及び物品の製造方法 |
| JP5451450B2 (ja) * | 2010-02-24 | 2014-03-26 | キヤノン株式会社 | インプリント装置及びそのテンプレート並びに物品の製造方法 |
| JP5632633B2 (ja) | 2010-03-26 | 2014-11-26 | キヤノン株式会社 | インプリント装置、インプリント方法及び物品の製造方法 |
| JP6004738B2 (ja) * | 2011-09-07 | 2016-10-12 | キヤノン株式会社 | インプリント装置、それを用いた物品の製造方法 |
| JP5938218B2 (ja) * | 2012-01-16 | 2016-06-22 | キヤノン株式会社 | インプリント装置、物品の製造方法およびインプリント方法 |
| JP6029494B2 (ja) | 2012-03-12 | 2016-11-24 | キヤノン株式会社 | インプリント方法およびインプリント装置、それを用いた物品の製造方法 |
| JP6180131B2 (ja) | 2012-03-19 | 2017-08-16 | キヤノン株式会社 | インプリント装置、それを用いた物品の製造方法 |
| JP2014033050A (ja) * | 2012-08-02 | 2014-02-20 | Toshiba Corp | インプリントシステム及びインプリント方法 |
| JP6282069B2 (ja) * | 2013-09-13 | 2018-02-21 | キヤノン株式会社 | インプリント装置、インプリント方法、検出方法及びデバイス製造方法 |
-
2014
- 2014-08-14 JP JP2014165198A patent/JP6472189B2/ja active Active
-
2015
- 2015-08-11 CN CN201510490307.9A patent/CN106200260B/zh active Active
- 2015-08-12 US US14/824,325 patent/US10514599B2/en active Active
- 2015-08-13 KR KR1020150114433A patent/KR101940365B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016042501A (ja) | 2016-03-31 |
| US10514599B2 (en) | 2019-12-24 |
| CN106200260A (zh) | 2016-12-07 |
| CN106200260B (zh) | 2020-01-21 |
| KR101940365B1 (ko) | 2019-01-18 |
| US20160046065A1 (en) | 2016-02-18 |
| KR20160021053A (ko) | 2016-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6472189B2 (ja) | インプリント装置、インプリント方法及び物品の製造方法 | |
| JP6552329B2 (ja) | インプリント装置、インプリントシステム及び物品の製造方法 | |
| US9915868B2 (en) | Imprint apparatus, imprint method, and article manufacturing method | |
| JP6120678B2 (ja) | インプリント方法、インプリント装置及びデバイス製造方法 | |
| US8550801B2 (en) | Imprint apparatus and method | |
| US10416553B2 (en) | Imprint method, imprint apparatus, and article manufacturing method | |
| TWI629709B (zh) | 壓印設備、壓印方法及製造產品的方法 | |
| US10751920B2 (en) | Imprint apparatus and method for producing article | |
| JP6512840B2 (ja) | インプリント装置及び方法、並びに物品の製造方法 | |
| JP6012209B2 (ja) | インプリント装置及び物品の製造方法 | |
| JP2012134466A (ja) | インプリント装置、及びそれを用いた物品の製造方法 | |
| JP6315904B2 (ja) | インプリント方法、インプリント装置及びデバイスの製造方法 | |
| JP6450105B2 (ja) | インプリント装置及び物品製造方法 | |
| US10908519B2 (en) | Alignment mark, imprinting method, manufacturing method of semiconductor device, and alignment device | |
| JP7278828B2 (ja) | 成形方法、成形装置、インプリント方法、および物品の製造方法 | |
| TWI709161B (zh) | 壓印裝置及物品的製造方法 | |
| JP6381721B2 (ja) | インプリント方法、インプリント装置及びデバイス製造方法 | |
| US20150146207A1 (en) | Detection apparatus, imprint apparatus, and method of manufacturing article | |
| JP6351412B2 (ja) | インプリント装置及び方法、物品の製造方法、並びにプログラム | |
| JP7361831B2 (ja) | 情報処理装置、成形装置、成形方法及び物品の製造方法 | |
| US20240066786A1 (en) | Nanofabrication method with correction of distortion within an imprint system | |
| JP2016207724A (ja) | インプリント装置、インプリント方法、および物品製造方法 | |
| JP2023006689A (ja) | 平坦化装置、および物品製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170725 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170725 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180601 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180724 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190122 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6472189 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |