JP6395348B2 - 回転位置検出装置 - Google Patents
回転位置検出装置 Download PDFInfo
- Publication number
- JP6395348B2 JP6395348B2 JP2013011187A JP2013011187A JP6395348B2 JP 6395348 B2 JP6395348 B2 JP 6395348B2 JP 2013011187 A JP2013011187 A JP 2013011187A JP 2013011187 A JP2013011187 A JP 2013011187A JP 6395348 B2 JP6395348 B2 JP 6395348B2
- Authority
- JP
- Japan
- Prior art keywords
- brush
- contact piece
- phase
- brushes
- phase contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
- Lens Barrels (AREA)
Description
I=bt3/12 …(2)
σ=3Eδh/L2 …(3)
上式(1)乃至(3)において、Fは押圧力、Eはヤング率、Iは断面二次モーメント、δはブラシのチャージ量、Lは支点から荷重点の長さ、bはブラシ板幅、tはブラシ板厚、σは曲げ応力、hは中立軸からの距離(t/2)である。
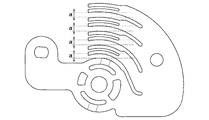
2 位相基板
2a 信号パターン
3 位相接片
3b,3c ブラシ
3d 接点
3e ベース部
4 押さえ板
Claims (3)
- 回転操作部材と、
ブラシを有し、前記回転操作部材の回転操作によって回転する位相接片と、
前記回転操作部材の回転操作によって、前記ブラシが摺動する複数の信号パターンを有する位相基板と、
前記位相接片が加締められた状態で固定される押さえ板と、を備え、
前記ブラシは、前記位相接片のベース部から前記位相接片の回転方向の一方向に延出形成される第1のブラシと、前記回転操作部材の半径方向でその先端部が前記第1のブラシの先端部と前記半径方向に対向するように前記半径方向に交互に配置されて、前記位相接片のベース部から前記回転方向の前記第1のブラシと反対方向に延出形成される第2のブラシとを有し、
前記第1のブラシおよび前記第2のブラシの根元部分の板幅を略同一にするとともに、前記第1のブラシおよび前記第2のブラシの各接点から前記位相接片の前記押さえ板との固定位置までの距離を略同一とし、かつ前記各接点が前記半径方向に一直線上に並んで配置され、
前記第1のブラシおよび前記第2のブラシの各接点を前記複数の信号パターンに接触させる前の状態において、互いに前記回転方向の逆方向に延出形成されて前記半径方向に対向する前記第1のブラシおよび前記第2のブラシは、前記各接点より先端側の最先端部がそれぞれ前記押さえ板側に曲げられることで、前記第1のブラシの最先端部が前記位相接片の回転軸の軸方向において前記第2のブラシより前記位相基板側に突出しないようにして前記第1のブラシの最先端部を前記第2ブラシにより保護し、前記第2のブラシの最先端部が前記位相接片の回転軸の軸方向において前記第1のブラシより前記位相基板側に突出しないようにして前記第2のブラシの最先端部を前記第1のブラシにより保護するように配置されていることを特徴とする回転位置検出装置。 - 前記位相接片は、複数の前記第1のブラシと複数の前記第2のブラシを有し、
前記複数の第1のブラシと前記複数の第2のブラシは、前記第1のブラシと前記第2のブラシが前記半径方向に交互に配置されていることを特徴とする請求項1に記載の回転位置検出装置。 - 回転位置検出装置を備える電子機器であって、
前記回転位置検出装置として、請求項1または2に記載の回転位置検出装置を備えることを特徴とする電子機器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013011187A JP6395348B2 (ja) | 2013-01-24 | 2013-01-24 | 回転位置検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013011187A JP6395348B2 (ja) | 2013-01-24 | 2013-01-24 | 回転位置検出装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2014142276A JP2014142276A (ja) | 2014-08-07 |
| JP2014142276A5 JP2014142276A5 (ja) | 2016-03-10 |
| JP6395348B2 true JP6395348B2 (ja) | 2018-09-26 |
Family
ID=51423682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013011187A Active JP6395348B2 (ja) | 2013-01-24 | 2013-01-24 | 回転位置検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6395348B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7013223B2 (ja) * | 2017-12-13 | 2022-02-15 | キヤノン株式会社 | 電子ダイヤル装置を有する電子機器 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS49147535U (ja) * | 1973-04-18 | 1974-12-19 | ||
| JPS5836101Y2 (ja) * | 1979-10-18 | 1983-08-15 | 松下電器産業株式会社 | 接点装置 |
| JPS5720103U (ja) * | 1980-07-07 | 1982-02-02 | ||
| JPS5895004U (ja) * | 1981-12-21 | 1983-06-28 | アルプス電気株式会社 | 電気部品のスライダ− |
| JPS58713A (ja) * | 1982-04-23 | 1983-01-05 | Canon Inc | 機械的変位量検出装置 |
| JPH0514484Y2 (ja) * | 1987-01-16 | 1993-04-19 | ||
| JPH0536246Y2 (ja) * | 1987-02-05 | 1993-09-14 | ||
| JP2691922B2 (ja) * | 1988-12-23 | 1997-12-17 | キヤノン株式会社 | 位置検出装置 |
| JP2670236B2 (ja) * | 1994-01-21 | 1997-10-29 | アルプス電気株式会社 | スライド型可変抵抗器 |
| JP2006071314A (ja) * | 2004-08-31 | 2006-03-16 | Nikon Corp | 位置検出器 |
-
2013
- 2013-01-24 JP JP2013011187A patent/JP6395348B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014142276A (ja) | 2014-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8440928B2 (en) | Rotary electronic component | |
| JP2007123459A (ja) | 回転型電気部品 | |
| JP6395348B2 (ja) | 回転位置検出装置 | |
| JP5317595B2 (ja) | 電子機器 | |
| JP5814676B2 (ja) | スライドスイッチ、及びスライドスイッチを備える電子機器 | |
| JP2008198359A (ja) | 接続端子及びこれを用いた電気部品。 | |
| JP2009009798A (ja) | 多方向入力装置 | |
| JP4425005B2 (ja) | 基板への電子部品取付構造 | |
| WO2004106867A1 (ja) | 液面検出装置 | |
| JP7340490B2 (ja) | シートベルト着脱検出スイッチ | |
| US10714284B2 (en) | Dial apparatus and imaging apparatus | |
| JP2009009799A (ja) | 多方向入力装置 | |
| JP6376837B2 (ja) | 回転式電子部品 | |
| JP2004103288A (ja) | 回転操作型電気部品 | |
| TWI636477B (zh) | 旋轉式電子零件 | |
| KR20130002936A (ko) | 스위치 | |
| JP4425325B2 (ja) | 基板への電子部品取付構造 | |
| JP3714535B2 (ja) | Pgaソケット | |
| JP5584589B2 (ja) | 多方向入力装置 | |
| JP2008108911A (ja) | 回転型可変抵抗器 | |
| JP7187066B2 (ja) | 回転式電子部品用摺動子 | |
| JP3187325U (ja) | 多方向入力装置 | |
| JPH11337429A (ja) | 回転操作型電子部品の検査装置及び検査方法 | |
| JP6658379B2 (ja) | 荷重検出装置 | |
| JP2021131419A (ja) | 操作ユニット及び電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160120 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160120 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170801 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180313 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180328 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180731 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180828 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6395348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |