JP6369399B2 - センサ出力補正装置 - Google Patents
センサ出力補正装置 Download PDFInfo
- Publication number
- JP6369399B2 JP6369399B2 JP2015129176A JP2015129176A JP6369399B2 JP 6369399 B2 JP6369399 B2 JP 6369399B2 JP 2015129176 A JP2015129176 A JP 2015129176A JP 2015129176 A JP2015129176 A JP 2015129176A JP 6369399 B2 JP6369399 B2 JP 6369399B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- zero point
- vehicle
- unit
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
- G01C19/5776—Signal processing not specific to any of the devices covered by groups G01C19/5607 - G01C19/5719
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/265—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network constructional aspects of navigation devices, e.g. housings, mountings, displays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/028—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure
- G01D3/032—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure affecting incoming signal, e.g. by averaging; gating undesired signals
Description
また、上記目的を達成するための第2の発明は、車両に搭載されてあって、車両に作用する所定の物理状態量を検出するセンサの検出値を逐次取得する検出値取得部(F1)と、車両の前方又は後方を撮影する車載カメラの撮影画像に対して画像認識処理を施すことで得られる、道路上に設けられた区画線の曲率を、車両が走行している道路である走行路の曲率として取得する曲率取得部(F3)と、車両が停車中であるか走行中であるかを判定する停車判定部(F2)と、曲率取得部が取得している曲率が、走行路を直線状の道路と近似することができる所定の近似閾値以下となっている場合に検出値取得部によって取得されたセンサの検出値に基づいて、センサの現在のゼロ点に相当する値であるゼロ点相当値を特定するとともに、停車判定部によって車両は停車していると判定されている間に検出値取得部によって取得された検出値に基づいてゼロ点相当値を逐次特定するゼロ点特定部(F5)と、ゼロ点特定部が特定したゼロ点相当値に対する信頼度を評価する信頼度評価部(F7)と、ゼロ点特定部が特定したゼロ点相当値を用いて、センサの検出値から当該センサに生じているゼロ点のずれに由来する誤差を除去するための補正値を決定する補正値決定部(F6)と、を備え、補正値決定部は、ゼロ点特定部が新たに特定したゼロ点相当値である新規特定値と、現在採用している補正値とを重み付け加算することで補正値を算出するものであって、新規特定値に対して信頼度評価部が評価した信頼度が高い程、重み付け加算において新規特定値に付与する重みを大きくし、信頼度評価部は、新規特定値が、停車中に取得された検出値に基づいてゼロ点特定部が特定したゼロ点相当値である停車時特定値である場合には、新規特定値が、曲率が近似閾値以下となっている道路を車両が走行している間に取得された検出値を母集団として特定されたゼロ点相当値である走行時特定値である場合よりも、新規特定値に対する信頼度を高くする一方、新規特定値が走行時特定値である場合には、画像認識処理によって認識できている区画線の認識距離が長いほど、新規特定値に対する信頼度を高く評価することを特徴とする。
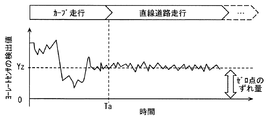
以上の構成によれば、ECU1は、サンプリング条件が充足されている間にヨーレートセンサ5からN回分の検出値を取得できた場合には(ステップS106 YES)、そのN回分の検出値に基づいて、補正値Qを、現在のゼロ点相当値Yzに対応する値に更新することができる。つまり、以上の構成によれば、走行中においても補正値Qを更新することができる。なお、サンプリング条件が充足されている状態とは、自車両が直線路を、走行速度が車速閾値Vth以上であって、かつ、舵角θが舵角閾値θth未満となっている状態で走行している状態を指す。
前述の第1実施形態で述べたECU1は、さらに、停車中のヨーレートセンサ5の検出値に基づいて、ヨーレートセンサ5に対する補正値を決定する処理(停車中補正値決定処理とする)を実施してもよい。停車中の検出値もまた、現在のゼロ点に相当する値となっていることが期待できるためである。以下、この停車中補正値決定処理について、図6に示すフローチャートを用いて説明する。
次に、本発明の第2実施形態について図を用いて説明する。なお、以降において前述の第1実施形態(及びその変形例)の構成の部材と同一の機能を有する部材については、同一の符号を付し、その説明を省略する。また、構成の一部のみに言及している場合、他の部分については先に説明した第1実施形態(及びその変形例)を適用することができる。
(式1) Q=Qa×(1−α)+Yz×α
次に、本発明の第3実施形態について図を用いて説明する。第3実施形態と先に説明した第1実施形態の変形例との主たる相違点は、停車中に収集した検出値に基づいて特定された最新のゼロ点相当値Yz(便宜上、停車時特定値Yzstpとする)と、走行中に収集した検出値に基づいて特定された最新のゼロ点相当値Yz(走行時特定値Yzrun)とを、所定の重みβ(T)(0≦β≦1)を用いて重み付け加算することで、新たな補正値Qを決定する点にある。具体的には、補正値Qは下記式2で求める態様とする。
(式2) Q=Yzstp×β(T)+Yzrun×{1−β(T)}
なお、以上の構成では、ヨーレートセンサ5を補正対象センサとした態様を例示したが、これに限らない。例えば舵角センサ3や、加速度センサ6、図示しないジャイロセンサなどを補正対象センサとしてもよい。なお、補正対象とするセンサが検出する状態量に応じて、走行中におけるサンプリング条件は適宜設計されれば良い。
Claims (5)
- 車両に搭載されてあって、前記車両に作用する所定の物理状態量を検出するセンサの検出値を逐次取得する検出値取得部(F1)と、
前記車両が走行している道路である走行路の曲率を取得する曲率取得部(F3)と、
前記車両が停車中であるか走行中であるかを判定する停車判定部(F2)と、
前記曲率取得部が取得している曲率が、前記走行路を直線状の道路と近似することができる所定の近似閾値以下となっている場合に前記検出値取得部によって取得された前記センサの検出値に基づいて、前記センサの現在のゼロ点に相当する値であるゼロ点相当値を特定するとともに、前記停車判定部によって前記車両は停車していると判定されている間に前記検出値取得部によって取得された検出値に基づいて前記ゼロ点相当値を逐次特定するゼロ点特定部(F5)と、
前記ゼロ点特定部が特定した前記ゼロ点相当値を用いて、前記センサの検出値から当該センサに生じているゼロ点のずれに由来する誤差を除去するための補正値を決定する補正値決定部(F6)と、を備え、
前記ゼロ点特定部は、
前記検出値取得部によって取得された検出値に基づいて、前記ゼロ点相当値を逐次特定し、
前記補正値決定部は、
前記曲率取得部が取得している曲率が前記近似閾値以下となっている道路を前記車両が走行している間に取得された検出値を母集団として特定された最新の前記ゼロ点相当値である走行時特定値と、停車中に取得された検出値に基づいて前記ゼロ点特定部が特定した最新の前記ゼロ点相当値である停車時特定値とを重み付け加算することで前記補正値を算出するものであって、
前記停車時特定値を特定してからの経過時間が長い程、前記重み付け加算において前記停車時特定値に付与する重みを小さくし、かつ、前記走行時特定値に付与する重みを大きくすることを特徴とするセンサ出力補正装置。 - 車両に搭載されてあって、前記車両に作用する所定の物理状態量を検出するセンサの検出値を逐次取得する検出値取得部(F1)と、
前記車両の前方又は後方を撮影する車載カメラの撮影画像に対して画像認識処理を施すことで得られる、道路上に設けられた区画線の曲率を、前記車両が走行している道路である走行路の曲率として取得する曲率取得部(F3)と、
前記車両が停車中であるか走行中であるかを判定する停車判定部(F2)と、
前記曲率取得部が取得している曲率が、前記走行路を直線状の道路と近似することができる所定の近似閾値以下となっている場合に前記検出値取得部によって取得された前記センサの検出値に基づいて、前記センサの現在のゼロ点に相当する値であるゼロ点相当値を特定するとともに、前記停車判定部によって前記車両は停車していると判定されている間に前記検出値取得部によって取得された検出値に基づいて前記ゼロ点相当値を逐次特定するゼロ点特定部(F5)と、
前記ゼロ点特定部が特定した前記ゼロ点相当値に対する信頼度を評価する信頼度評価部(F7)と、
前記ゼロ点特定部が特定した前記ゼロ点相当値を用いて、前記センサの検出値から当該センサに生じているゼロ点のずれに由来する誤差を除去するための補正値を決定する補正値決定部(F6)と、を備え、
前記補正値決定部は、前記ゼロ点特定部が新たに特定した前記ゼロ点相当値である新規特定値と、現在採用している前記補正値とを重み付け加算することで前記補正値を算出するものであって、前記新規特定値に対して前記信頼度評価部が評価した信頼度が高い程、前記重み付け加算において前記新規特定値に付与する重みを大きくし、
前記信頼度評価部は、
前記新規特定値が、停車中に取得された検出値に基づいて前記ゼロ点特定部が特定した前記ゼロ点相当値である停車時特定値である場合には、前記新規特定値が、曲率が前記近似閾値以下となっている道路を前記車両が走行している間に取得された検出値を母集団として特定された前記ゼロ点相当値である走行時特定値である場合よりも、前記新規特定値に対する信頼度を高くする一方、
前記新規特定値が前記走行時特定値である場合には、前記画像認識処理によって認識できている前記区画線の認識距離が長いほど、前記新規特定値に対する信頼度を高く評価することを特徴とするセンサ出力補正装置。 - 請求項2において、
前記信頼度評価部は、
前記ゼロ点相当値を前回特定してから前記新規特定値を特定するまでの経過時間が長いほど、前記新規特定値に対する信頼度を高く評価することを特徴とするセンサ出力補正装置。 - 請求項1から3の何れか1項において、
前記検出値取得部が取得した検出値を記憶する検出値記憶部(M1)を備え、
前記補正値決定部は、
前記曲率取得部が取得している曲率が前記近似閾値以下となっている間に前記検出値取得部によって取得され、前記検出値記憶部に保存されている検出値のうち、最新の検出値から過去所定回数分の検出値を母集団として前記補正値を算出するものであって、
前記補正値を算出するための前記母集団に含まれる検出値のばらつき度合いを算出し、
前記ばらつき度合いが所定の許容範囲に収まっている場合に、当該母集団に基づいて前記補正値を決定することを特徴とするセンサ出力補正装置。 - 請求項4において、
前記補正値決定部は、前記ゼロ点特定部が新たに特定した前記ゼロ点相当値と、現在採用している前記補正値を決定するために用いられた前記ゼロ点相当値との差が所定の誤差範囲に収まっている場合には、前記補正値を更新しないことを特徴とするセンサ出力補正装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129176A JP6369399B2 (ja) | 2015-06-26 | 2015-06-26 | センサ出力補正装置 |
| PCT/JP2016/067535 WO2016208440A1 (ja) | 2015-06-26 | 2016-06-13 | センサの出力補正装置 |
| US15/738,508 US10767994B2 (en) | 2015-06-26 | 2016-06-13 | Sensor output correction apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015129176A JP6369399B2 (ja) | 2015-06-26 | 2015-06-26 | センサ出力補正装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017015410A JP2017015410A (ja) | 2017-01-19 |
| JP2017015410A5 JP2017015410A5 (ja) | 2017-07-27 |
| JP6369399B2 true JP6369399B2 (ja) | 2018-08-08 |
Family
ID=57585712
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015129176A Active JP6369399B2 (ja) | 2015-06-26 | 2015-06-26 | センサ出力補正装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10767994B2 (ja) |
| JP (1) | JP6369399B2 (ja) |
| WO (1) | WO2016208440A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190003918A (ko) | 2017-06-30 | 2019-01-10 | 현대엠엔소프트 주식회사 | 차량 속도 기반 자이로 센서 캘리브레이션 방법 |
| KR101979429B1 (ko) * | 2017-08-14 | 2019-05-16 | 네이버랩스 주식회사 | 전동식 이동 대차의 힘 감지 센서 캘리브레이션 방법 및 그 장치 |
| CN108489480B (zh) * | 2018-03-19 | 2021-08-13 | 中国林业科学研究院资源信息研究所 | 一种飞机航迹直线转弯检测方法 |
| CN108496059B (zh) * | 2018-03-26 | 2019-12-27 | 深圳市锐明技术股份有限公司 | 一种惯量传感器的校正方法、装置、终端设备和存储介质 |
| DE102018115428A1 (de) * | 2018-06-27 | 2020-01-02 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Ermitteln eines Offsetwertes für eine inertiale Messeinheit bei einem stationären Bewegungszustand eines Kraftfahrzeugs |
| EP3904187A4 (en) * | 2018-12-28 | 2022-09-28 | Aichi Steel Corporation | CORRECTION PROCEDURE FOR GYROSCOPIC SENSOR |
| US11151002B2 (en) * | 2019-04-05 | 2021-10-19 | International Business Machines Corporation | Computing with unreliable processor cores |
| KR20210096478A (ko) * | 2020-01-28 | 2021-08-05 | 엘지전자 주식회사 | 유모차 및 그 동작 방법 |
| CN113320566B (zh) * | 2020-02-28 | 2023-04-07 | 长沙智能驾驶研究院有限公司 | 多列车铰接角零位标定方法、装置和计算机设备 |
| JP2023132591A (ja) * | 2022-03-11 | 2023-09-22 | 日野自動車株式会社 | ヨーレート較正装置 |
| CN117074722A (zh) * | 2023-09-08 | 2023-11-17 | 无锡车联天下信息技术有限公司 | 一种加速度传感器的零位标定方法和零位标定装置 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS58201104A (ja) * | 1982-05-19 | 1983-11-22 | Hitachi Ltd | デ−タ処理装置 |
| JPH0814490B2 (ja) * | 1987-01-23 | 1996-02-14 | 松下電器産業株式会社 | 車載用ナビゲ−シヨン装置 |
| DE3924691C2 (de) * | 1989-07-26 | 1993-11-04 | Daimler Benz Ag | Verfahren zur kompensation von fehlern eines beschleunigungsgebers |
| US5424953A (en) | 1992-01-16 | 1995-06-13 | Pioneer Electronic Corporation | Navigation apparatus |
| JP3140130B2 (ja) * | 1992-01-16 | 2001-03-05 | パイオニア株式会社 | ナビゲーション装置 |
| JPH06213659A (ja) * | 1993-01-19 | 1994-08-05 | Aisin Seiki Co Ltd | 車両前方の物体検出方法 |
| JPH07159438A (ja) | 1993-12-07 | 1995-06-23 | Nippondenso Co Ltd | 加速度センサの補正装置 |
| JP3018956B2 (ja) * | 1995-09-28 | 2000-03-13 | 三菱自動車工業株式会社 | ハイブリッド電気自動車の電源出力の可変制御装置 |
| JP2857091B2 (ja) * | 1995-12-01 | 1999-02-10 | 富士通テン株式会社 | ジャイロ装置 |
| US5906653A (en) | 1995-12-01 | 1999-05-25 | Fujitsu Ten Limited | Navigation system and gyroscopic device |
| KR20000068067A (ko) * | 1997-06-05 | 2000-11-25 | 시뮬라, 인코포레이티드 | 회전각 센서를 위한 방법 및 장치 |
| US8301108B2 (en) * | 2002-11-04 | 2012-10-30 | Naboulsi Mouhamad A | Safety control system for vehicles |
| US9818136B1 (en) * | 2003-02-05 | 2017-11-14 | Steven M. Hoffberg | System and method for determining contingent relevance |
| SE0403229D0 (sv) * | 2004-12-30 | 2004-12-30 | Abb Ab | A method and a system for adaptive compensation of the temperature drift for a sensor |
| JP2007106210A (ja) * | 2005-10-12 | 2007-04-26 | Toyota Motor Corp | 車両の挙動制御装置 |
| JP4784447B2 (ja) | 2006-08-31 | 2011-10-05 | ソニー株式会社 | ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム |
| JP5278425B2 (ja) * | 2008-03-14 | 2013-09-04 | 日本電気株式会社 | 映像分割装置、方法及びプログラム |
| JP5159559B2 (ja) | 2008-10-28 | 2013-03-06 | ダイハツ工業株式会社 | 車載用加速度センサ零点補正装置 |
| WO2010050344A1 (ja) * | 2008-10-28 | 2010-05-06 | 株式会社アドヴィックス | 車両の走行制御装置 |
| US20120089297A1 (en) | 2009-06-03 | 2012-04-12 | Toyota Jidosha Kabushiki Kaisha | Sensor offset amount estimate device |
| JP5610847B2 (ja) * | 2010-05-26 | 2014-10-22 | 三菱電機株式会社 | 角速度推定装置及びコンピュータプログラム及び角速度推定方法 |
| CN103298686B (zh) * | 2011-01-07 | 2016-02-17 | 本田技研工业株式会社 | 电动助力转向装置 |
| DE102013100577B4 (de) * | 2012-01-25 | 2024-02-29 | Denso Corporation | Spurhalte-Steuersystem |
| DE102013100578B4 (de) * | 2012-01-25 | 2024-02-01 | Denso Corporation | Spurhalte-Steuersystem |
| JP5926080B2 (ja) | 2012-03-19 | 2016-05-25 | 株式会社日本自動車部品総合研究所 | 走行区画線認識装置およびプログラム |
| EP2861524A4 (en) * | 2012-06-13 | 2016-07-06 | Purdue Research Foundation | MICROELECTROMECHANICAL SYSTEM (MEMS) AND METHODS OF USE |
| JP2014021826A (ja) * | 2012-07-20 | 2014-02-03 | Nec Corp | ストリームデータ処理装置、ストリームデータ処理方法、及び、プログラム |
| US9340212B2 (en) * | 2014-04-01 | 2016-05-17 | GM Global Technology Operations LLC | System and method for estimating road grade based on an output of a longitudinal acceleration sensor in a vehicle |
| JP5990606B2 (ja) * | 2015-02-10 | 2016-09-14 | 本田技研工業株式会社 | 操舵装置及び操舵支援方法 |
| WO2016168854A1 (en) * | 2015-04-17 | 2016-10-20 | Traxxas Lp | Steering stabilizing apparatus for a model vehicle |
-
2015
- 2015-06-26 JP JP2015129176A patent/JP6369399B2/ja active Active
-
2016
- 2016-06-13 WO PCT/JP2016/067535 patent/WO2016208440A1/ja active Application Filing
- 2016-06-13 US US15/738,508 patent/US10767994B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10767994B2 (en) | 2020-09-08 |
| JP2017015410A (ja) | 2017-01-19 |
| US20180188029A1 (en) | 2018-07-05 |
| WO2016208440A1 (ja) | 2016-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6369399B2 (ja) | センサ出力補正装置 | |
| JP6469220B2 (ja) | 走行車線判別装置および走行車線判別方法 | |
| EP2657920B1 (en) | Driving assist device | |
| US11709492B2 (en) | Information processing device, information processing method, and non-transitory computer readable medium | |
| EP2933790A1 (en) | Moving object location/attitude angle estimation device and moving object location/attitude angle estimation method | |
| JP2016156973A (ja) | 地図データ記憶装置、制御方法、プログラム及び記憶媒体 | |
| EP3327532B1 (en) | Self-position estimation device and method for estimating self-position | |
| JP5257252B2 (ja) | 運転支援装置および運転支援システム | |
| EP3358545A1 (en) | Travel control method and travel control device | |
| JP6407447B1 (ja) | 走行路認識装置及び走行路認識方法 | |
| WO2019203084A1 (ja) | 地図情報更新システムおよび地図情報更新プログラム | |
| JP2006349580A (ja) | 走行状況判定装置及び車載ナビゲーション装置 | |
| US20150294453A1 (en) | Image analysis apparatus mounted to vehicle | |
| JP2014010636A (ja) | 電子機器 | |
| CN111845740A (zh) | 动态偏航角速率偏差估计的方法和装置 | |
| JP2019207190A (ja) | 自己位置推定装置 | |
| US11385381B2 (en) | Flood detection device, flood detection system, and computer-readable storage medium | |
| JP7123530B2 (ja) | 通信装置、通信システム、及び通信方法 | |
| CN112762944A (zh) | 零速区间检测及零速更新方法 | |
| JP2019060814A (ja) | 自動運転の自車位置検出装置 | |
| JP2006317287A (ja) | 車両用現在位置決定装置 | |
| JP2004280138A (ja) | 道路形状認識装置 | |
| CN111492204B (zh) | 确定修正值的方法,确定一机动车辆位置的方法,电子控制装置和存储介质 | |
| JP2011080947A (ja) | タイヤ空気圧測定装置、方法およびプログラム | |
| JP2008101987A (ja) | 車載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180612 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180625 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6369399 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |