JP6362262B2 - 角度推定装置および角度推定方法 - Google Patents
角度推定装置および角度推定方法 Download PDFInfo
- Publication number
- JP6362262B2 JP6362262B2 JP2014208417A JP2014208417A JP6362262B2 JP 6362262 B2 JP6362262 B2 JP 6362262B2 JP 2014208417 A JP2014208417 A JP 2014208417A JP 2014208417 A JP2014208417 A JP 2014208417A JP 6362262 B2 JP6362262 B2 JP 6362262B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- angle
- error
- incident angle
- matrix
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 73
- 239000011159 matrix material Substances 0.000 claims description 105
- 238000011156 evaluation Methods 0.000 claims description 92
- 239000013598 vector Substances 0.000 claims description 66
- 238000001514 detection method Methods 0.000 claims description 42
- 238000001228 spectrum Methods 0.000 claims description 28
- 238000012545 processing Methods 0.000 claims description 23
- 238000004364 calculation method Methods 0.000 claims description 20
- 238000000354 decomposition reaction Methods 0.000 claims description 16
- 230000014509 gene expression Effects 0.000 claims description 7
- 238000005259 measurement Methods 0.000 claims description 6
- 230000008569 process Effects 0.000 claims description 5
- 230000017105 transposition Effects 0.000 claims description 4
- 230000006870 function Effects 0.000 description 52
- 238000010586 diagram Methods 0.000 description 20
- 230000005540 biological transmission Effects 0.000 description 10
- 230000010355 oscillation Effects 0.000 description 5
- 238000004891 communication Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 239000000523 sample Substances 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 206010057239 Post laminectomy syndrome Diseases 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/74—Multi-channel systems specially adapted for direction-finding, i.e. having a single antenna system capable of giving simultaneous indications of the directions of different signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4021—Means for monitoring or calibrating of parts of a radar system of receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
(角度推定装置の機能的構成)
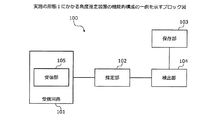
図1は、実施の形態1にかかる角度推定装置の機能的構成の一例を示すブロック図である。角度推定装置100は、超音波、電波、光、などを用いて、物体を捜索、探知、測距または測角する装置に用いられる。具体的には、角度推定装置100は、ソナーやレーダなどに用いられる。角度推定装置100は、受信回路101と、推定部102と、保存部103と、検出部104と、を有する。受信回路101は、複数の受信部105と、複数の受信部105によって受信された各信号を増幅する不図示のアンプを含む。受信部105は、例えば、センサアレイ、アンテナなどである。
図2は、角度推定装置の構成の一例を示す説明図である。角度推定装置100は、発振回路201と、方向性結合器202と、パワーアンプ203と、送信アンテナ204と、受信アンテナ205と、ローノイズアンプ206と、ミキサ207と、A/D変換器208と、信号処理部209と、を有する。なお、ミキサ207とA/D変換器208との間には通常LPF(Low Pass Filter)等のベースバンド回路が入るが、説明を簡単にするため、これらのコンポーネントについては割愛した。
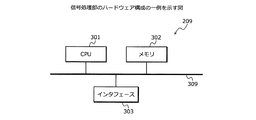
図3は、信号処理部のハードウェア構成の一例を示す図である。図3に示すように、信号処理部209は、CPU(Central Processing Unit)301と、メモリ302と、インタフェース303と、を備えている。CPU301、メモリ302およびインタフェース303は、バス309によって接続されている。
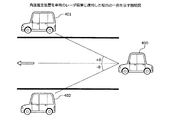
図4は、角度推定装置を車両のレーダ装置に適用した場合の一例を示す説明図である。図4に示すように、車両400に搭載されるレーダ装置は、前方の車両401,402を探知して測距する。例えば、車両401は、車両400の前方の角度+θ方向に位置している。車両402は、車両400の前方の角度−θ方向に位置している。
図2に戻り、信号処理部209による角度推定の原理について説明する。説明を簡単にするため、送信アンテナ204の数Mを1とし、受信アンテナ205の数Nを4とする。受信アンテナ205はX軸上に等しい間隔dで直線状に配置されているものとする。なお、このような受信アンテナ205をULA(Uniform Linear Array)という。

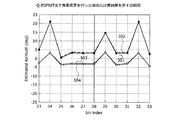
ここで、ESPRIT法による推定結果について説明する。上述したように、このような状態で角度推定を行うと、推定値には誤差が含まれる。ここで、図5を用いて、Q(Quick)−ESPRIT法で角度推定を行った場合の計算結果について説明する。なお、Q−ESPRIT法は、例えば、特開2012−103132号公報に記載の「高速化ESPRIT法」と同様の手法である。
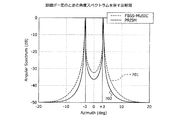
次に、PRISM法およびMUSIC法による推定結果について説明する。
ここで、装置を運用している最中に信号処理でキャリブレーション誤差の発生を検出するためには、角度θに対する値がキャリブレーション誤差Cだけに反応して変化する評価関数f(C,θ)を用いる。一方、出荷時のキャリブレーションを行った後、エラーフリーモードベクトルa0(θ)の測定値、および、FOV(レーダ視野角)内の複数の角度θm(m=1〜M)に対する評価関数の計算値(参照値f(I,θm))をそれぞれ保存しておく。
Q−ESPRIT法における評価関数は以下のように導出することができる。上記(17)式および(18)式を参照すると、下記(19)式に示すように、キャリブレーション誤差を含む角度行列CAが再生できることがわかる。ただし、簡単に予想できることであるから説明については割愛するが、ここで示した誤差を含んだ角度行列の表記は一例である。
上記(20)式から、明らかに下記(21)式が成り立つ。キャリブレーション誤差の大きさは、行列:C(A0A0 H)CHの対角要素とエラーフリーモードベクトルa0(θk)とを用いて推定される。ここで、図1に示した検出部104は、上記(20)式のWWHの対角要素から得られる誤差に関する値に基づいて、誤差の発生した受信部105(受信アンテナ205)を検出することができる。具体的には、誤差に関する値は、例えば、下記(21)式の|c1|2〜|c4|2である。
キャリブレーションのズレが角度推定へおよぼす影響は、位相成分に比べて振幅成分の方が深刻であることが多いが、キャリブレーションのズレが大きくなると位相成分についても問題になる。ここで、図1に示した検出部104は、行列Wと、角度行列A0=[a0(θ1),…,a0(θk)]の一般逆行列と、に基づいて、誤差の値を検出する。下記(22)式に示すように、上記(19)式の行列CA0(=W)の右側からA0の一般逆行列(A0の上付き添え字+が一般逆行列を示す)をかけることにより、位相誤差も含めたキャリブレーション誤差Cの値を直接求めることができる。なお、一般逆行列は、擬似行列ともいう。
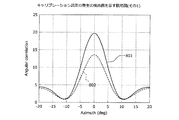
図8は、キャリブレーション誤差の発生の検出例を示す説明図(その1)である。図8の説明図は、上記(20)式を用いた場合のキャリブレーション誤差の発生の検出例を示している。図8において、横軸は角度を示し、縦軸は角度相関を示している。図8のグラフ801で横軸の位置がθmに対応する角度相関値は、エラーフリー時における真の角度θmに対応する評価関数の値f(I,θm)を示している。
次に、角度推定装置100の実施の形態2について説明する。実施の形態1では、ESPRIT法によるキャリブレーション誤差の推定について説明したが、実施の形態2ではスペクトラム走査型の手法によるキャリブレーション誤差の推定について説明する。実施の形態2においては、実施の形態1と異なる部分について説明を行う。
Capon法、MUSIC法、プリズム法およびLP法といったスペクトラム走査型の手法(ESPRIT型以外の手法)における評価関数は、以下のように導出することができる。例えば、キャリブレーション誤差が生じた場合は、上記(10)式はキャリブレーション誤差を含んだ異なる式となる。
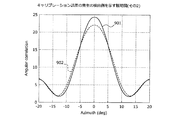
図9は、キャリブレーション誤差の発生の検出例を示す説明図(その2)である。図9の説明図は、上記(24)式を用いた場合のキャリブレーション誤差の検出例を示している。図9において、横軸は角度を示し、縦軸は角度相関を示している。図9のグラフ901は、エラーフリー時(参照値)を示している。一方、グラフ902は、キャリブレーション誤差が生じている場合を示している。グラフ902は、キャリブレーション誤差の正/負に応じて、グラフ901の上/下にレベルがシフトする。角度θmの近傍の角度θkにおけるグラフ901,902との相違が閾値を超えた場合にキャリブレーション誤差が発生したものと判定される。
次に、角度推定装置100の実施の形態3について説明する。実施の形態3では位相誤差を考慮したキャリブレーション誤差の検出について説明する。実施の形態3においては、実施の形態1,2と異なる部分について説明を行う。
次に、角度推定装置100の実施の形態4について説明する。実施の形態4では、雑音固有ベクトルEnを用いたキャリブレーション誤差の検出について説明する。実施の形態4においては、実施の形態1〜3と異なる部分について説明を行う。
前記受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定する推定部と、
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存し、前記誤差がない状態における、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な評価関数による前記評価値の算出結果と前記推定部による前記各信号の入射角度とを対応付けて保存する保存部と、
前記推定部によって推定された前記各信号の入射角度が、前記保存部によって保存された前記各信号の入射角度近傍の値に対応する角度である場合、前記保存部によって保存されたモードベクトルの測定値と前記評価関数とに基づく評価値を算出し、算出した評価値と前記保存部によって保存された評価値との比較に基づいて前記誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。
前記評価関数は、前記推定部における角度推定の際に用いる所定の行列を固有値分解して得られる複数の行列を組み合わせることによって生成される行列Wを用いて定義される関数(下記(30)式)であることを特徴とする付記1に記載の角度推定装置。
前記推定部は、前記受信回路によって重み付けされた各信号の角度スペクトラムの走査に基づいて前記各信号の入射角度を推定し、
前記保存部は、前記推定部によって推定された前記各信号の入射角度θm(m=1〜M)に基づく前記モードベクトルの測定値b0(θm)とともに、このデータを用いてモードベクトルモデルb(θm)(角度は変数扱い)を生成、保存しておき(下記(31)式)、
前記検出部は、前記推定部によって推定された入射角度が、前記保存部によって保存された前記各信号の入射角度θmの近傍の角度であった場合、θmに代えて該推定角度θkを前記モードベクトルモデルb(θm)に代入し、角度行列W=[b(θ1),…,b(θk)]を生成し、前記評価関数(下記(32)式)に基づいて評価値を算出することを特徴とする付記1に記載の角度推定装置。
前記受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定する推定部と、
互いに異なる2つの受信部からの信号の組み合わせ毎に、前記組み合わせを構成する受信部の間隔と、前記組み合わせから得られる2つの信号を用いて算出される前記推定部による推定結果と、に基づいて前記組み合わせの空間位相を算出し、前記組み合わせ毎に算出した空間位相の相違に基づいて前記受信回路の特性に対する前記重みの誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。
前記受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定する推定部と、
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存する保存部と、
前記推定部によって推定された前記各信号の入射角度が所定の入射角度である場合、前記保存部によって保存されたモードベクトルの測定値と、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な関数と、に基づく行列W(下記(33)式)を算出し、算出した前記行列Wと、前記重みの誤差がない状態における複数の入射角度θm(m=1〜M)についてMUSIC(MUltiple SIgnal Classification)法により得られる雑音固有ベクトルEnと、所定の関数(下記(34)式)と、に基づいて前記誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存し、前記誤差がない状態における、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な評価関数による前記評価値の算出結果と、推定した前記各信号の入射角度とを対応付けて保存し、
推定した前記各信号の入射角度が、保存した前記各信号の入射角度近傍の値に対応する角度である場合、保存したモードベクトルの測定値と前記評価関数とに基づく評価値を算出し、算出した評価値と保存した評価値との比較に基づいて前記誤差の発生を検出する、
ことを特徴とする角度推定方法。
互いに異なる2つの受信部からの信号の組み合わせ毎に、前記組み合わせを構成する受信部の間隔と、前記組み合わせから得られる2つの信号に基づいて算出される前記入射角度の推定結果から空間位相を算出し、前記組み合わせ毎に算出した空間位相の相違に基づいて前記受信回路の特性に対する前記重みの誤差の発生を検出する、
ことを特徴とする角度推定方法。
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存し、
推定した前記各信号の入射角度が所定の入射角度である場合、保存したモードベクトルの測定値と、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な関数と、に基づく行列W(下記(35)式)を算出し、算出した前記行列Wと、前記重みの誤差がない状態における複数の入射角度θm(m=1〜M)についてMUSIC(MUltiple SIgnal Classification)法により得られる雑音固有ベクトルEnと、所定の関数(下記(36)式)と、に基づいて前記誤差の発生を検出する、
ことを特徴とする角度推定方法。
101 受信回路
102,221 推定部
103 保存部
104 検出部
105 受信部
201 発振回路
202 方向性結合器
203 パワーアンプ
204 送信アンテナ
205(205a〜205d) 受信アンテナ
206 ローノイズアンプ
207 ミキサ
208 A/D変換器
209 信号処理部
222 角度行列再生部
223 参照値テーブル
224 スペクトラム比較部
301 CPU
302 メモリ
303 インタフェース
Claims (9)
- 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路と、
前記受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定する推定部と、
前記受信回路の特性に対する前記重みの誤差がない状態における、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な評価関数による前記評価値の算出結果と前記推定部によって推定された前記各信号の入射角度とを対応付けて保存する保存部と、
前記推定部によって推定された前記各信号の入射角度が、前記保存部によって保存された前記各信号の入射角度近傍の値に対応する角度である場合、前記評価関数に基づく評価値を算出し、算出した評価値と前記保存部によって保存された評価値との比較に基づいて前記誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。 - 前記保存部は、前記誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存し、
前記推定部は、前記複数の受信部間における前記各信号に基づく所定の行列の固有値分解を含む処理により前記各信号の入射角度を推定し、
前記評価関数は、前記推定部における角度推定の際に用いる前記所定の行列を固有値分解して得られる行列および固有値を組み合わせることによって生成される行列Wを用いて定義される関数(下記(1)式)であることを特徴とする請求項1に記載の角度推定装置。
- 前記検出部は、前記(1)式の前記行列Wと、前記各信号について前記推定部によって推定された入射角度θ 1 〜θ k に関する角度行列A0=[a0(θ1),…,a0(θk)]の一般逆行列と、に基づいて前記誤差の値を検出することを特徴とする請求項2に記載の角度推定装置。
- 前記受信回路は、前記複数の受信部によって受信された各信号を増幅するアンプ、アンプからの出力信号を復調するミキサ、ミキサからの出力をデジタル信号に変換するA/D
(Analog to Digital)変換器、および信号処理部を含み、
前記推定部は、前記受信回路によって重み付けされた各信号の角度スペクトラムの走査に基づいて前記各信号の入射角度を推定し、
前記保存部は、前記推定部によって推定された前記各信号の入射角度θm(m=1〜M)に基づく前記モードベクトルの測定値b0(θm)とともに、前記モードベクトルの測定値b 0 (θ m )を用いてモードベクトルモデルb(θm)(角度は変数扱い)を生成、保存しておき(下記(2)式)、
前記検出部は、前記推定部によって推定された入射角度が、前記保存部によって保存された前記各信号の入射角度θmの近傍の角度であった場合、θmに代えて該推定角度θkを前記モードベクトルモデルb(θm)に代入し、角度行列W=[b(θ1),…,b(θk)]を生成し、前記評価関数(下記(3)式)に基づいて評価値を算出することを特徴とする請求項1に記載の角度推定装置。
- 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路と、
前記受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定する推定部と、
互いに異なる2つの受信部からの信号の組み合わせ毎に、前記組み合わせを構成する受信部の間隔と、前記組み合わせから得られる2つの信号を用いて算出される前記推定部による推定結果と、に基づいて前記組み合わせの空間位相を算出し、前記組み合わせ毎に算出した空間位相の相違に基づいて前記受信回路の特性に対する前記重みの誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。 - 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路と、
前記受信回路によって重み付けされた各信号に基づく所定の行列の固有値分解を含む処理により前記各信号の入射角度を推定する推定部と、
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存する保存部と、
前記推定部によって推定された前記各信号の入射角度が所定の入射角度である場合、前記保存部によって保存されたモードベクトルの測定値と、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な関数と、に基づく行列W(下記(4)式)を算出し(ただし、Lの列数はV-Hの行数と等しく定める)、算出した前記行列Wと、前記重みの誤差がない状態における複数の入射角度θm(m=1〜M)についてMUSIC(MUltiple SIgnal Classification)法により得られる雑音固有ベクトルEnと、所定の関数(下記(5)式)と、に基づいて前記誤差の発生を検出する検出部と、
を有することを特徴とする角度推定装置。
- 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定し、
前記受信回路の特性に対する前記重みの誤差がない状態における、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な評価関数による前記評価値の算出結果と、推定した前記各信号の入射角度とを対応付けて保存し、
推定した前記各信号の入射角度が、保存した前記各信号の入射角度近傍の値に対応する角度である場合、前記評価関数に基づく評価値を算出し、算出した評価値と保存した評価値との比較に基づいて前記誤差の発生を検出する、
ことを特徴とする角度推定方法。 - 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路によって重み付けされた各信号に基づいて前記各信号の入射角度を推定し、
互いに異なる2つの受信部からの信号の組み合わせ毎に、前記組み合わせを構成する受信部の間隔と、前記組み合わせから得られる2つの信号に基づいて算出される前記入射角度の推定結果から空間位相を算出し、前記組み合わせ毎に算出した空間位相の相違に基づいて前記受信回路の特性に対する前記重みの誤差の発生を検出する、
ことを特徴とする角度推定方法。 - 複数の受信部を含み、キャリブレーションによって設定された重みを用いて前記複数の受信部に入射された各信号を重み付けする受信回路によって重み付けされた各信号に基づく所定の行列の固有値分解を含む処理により前記各信号の入射角度を推定し、
前記受信回路の特性に対する前記重みの誤差がない状態における前記受信回路の特性を反映したモードベクトルの測定値を保存し、
推定した前記各信号の入射角度が所定の入射角度である場合、保存したモードベクトルの測定値と、前記誤差および前記各信号の入射角度に応じて変化する評価値を算出可能な関数と、に基づく行列W(下記(6)式)を算出し(ただし、Lの列数はV-Hの行数と等しく定める)、算出した前記行列Wと、前記重みの誤差がない状態における複数の入射角度θm(m=1〜M)についてMUSIC(MUltiple SIgnal Classification)法により得られる雑音固有ベクトルEnと、所定の関数(下記(7)式)と、に基づいて前記誤差の発生を検出する、
ことを特徴とする角度推定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014208417A JP6362262B2 (ja) | 2014-10-09 | 2014-10-09 | 角度推定装置および角度推定方法 |
| DE102015219483.3A DE102015219483B4 (de) | 2014-10-09 | 2015-10-08 | Winkelabschätzungsvorrichtung und Winkelabschätzungsverfahren |
| US14/878,846 US10852410B2 (en) | 2014-10-09 | 2015-10-08 | Angle estimating apparatus and angle estimating method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014208417A JP6362262B2 (ja) | 2014-10-09 | 2014-10-09 | 角度推定装置および角度推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016080369A JP2016080369A (ja) | 2016-05-16 |
| JP6362262B2 true JP6362262B2 (ja) | 2018-07-25 |
Family
ID=55644355
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014208417A Active JP6362262B2 (ja) | 2014-10-09 | 2014-10-09 | 角度推定装置および角度推定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10852410B2 (ja) |
| JP (1) | JP6362262B2 (ja) |
| DE (1) | DE102015219483B4 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107210005B (zh) * | 2015-01-15 | 2020-07-10 | 日本电信电话株式会社 | 矩阵/密钥生成装置、矩阵/密钥生成系统、矩阵结合装置、矩阵/密钥生成方法、程序 |
| US10481242B2 (en) * | 2015-09-25 | 2019-11-19 | Texas Instruments Incorporated | Method for joint antenna-array calibration and direction of arrival estimation for automotive applications |
| KR101796472B1 (ko) | 2016-09-30 | 2017-12-12 | 숭실대학교 산학협력단 | 레이더 장치 및 그것을 이용한 도래각 추정 방법 |
| JP2022511271A (ja) * | 2018-08-23 | 2022-01-31 | ボード オブ リージェンツ,ザ ユニバーシティ オブ テキサス システム | 音響信号を用いて手の動きを追跡することによる装置の制御 |
| JP7222952B2 (ja) | 2020-07-29 | 2023-02-15 | 京セラ株式会社 | 電子機器、電子機器の制御方法、及びプログラム |
| JP7472060B2 (ja) * | 2021-03-03 | 2024-04-22 | 株式会社日立国際電気 | 到来方向推定システム |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19942665B4 (de) * | 1998-09-07 | 2014-02-13 | Denso Corporation | FM-CW-Radarvorrichtung zum Messen der Entfernung zu einem Target und der relativen Geschwindigkeit des Targets |
| JP4320441B2 (ja) * | 2004-03-09 | 2009-08-26 | よこはまティーエルオー株式会社 | アレーアンテナの校正方法及び校正装置 |
| JP2006067869A (ja) | 2004-09-01 | 2006-03-16 | Matsushita Electric Ind Co Ltd | 分離回収方法 |
| WO2006067857A1 (ja) * | 2004-12-24 | 2006-06-29 | Fujitsu Limited | 到来方向推定装置及びプログラム |
| US7199753B2 (en) * | 2005-06-16 | 2007-04-03 | Raytheon Company | Calibration method for receive only phased array radar antenna |
| JP4498269B2 (ja) * | 2005-11-30 | 2010-07-07 | 株式会社デンソーアイティーラボラトリ | レーダ信号処理装置 |
| US7667646B2 (en) * | 2006-02-21 | 2010-02-23 | Nokia Corporation | System and methods for direction finding using a handheld device |
| US7873326B2 (en) * | 2006-07-11 | 2011-01-18 | Mojix, Inc. | RFID beam forming system |
| JP2010019086A (ja) | 2008-07-08 | 2010-01-28 | Toyota Motor Corp | 内燃機関装置およびその制御方法並びに車両 |
| JP5192463B2 (ja) | 2009-08-07 | 2013-05-08 | 株式会社デンソー | 信号処理装置 |
| JP5768953B2 (ja) * | 2010-08-02 | 2015-08-26 | 日本電気株式会社 | 通信衛星、較正システム、及びアレーアンテナの較正方法 |
| JP5675285B2 (ja) | 2010-11-10 | 2015-02-25 | 富士通テン株式会社 | レーダ装置 |
| JP5701106B2 (ja) | 2011-03-04 | 2015-04-15 | 富士通テン株式会社 | レーダ装置及び該レーダ装置の到来角算出方法 |
| JP5866917B2 (ja) * | 2011-09-20 | 2016-02-24 | 富士通株式会社 | 探知測距装置および探知測距方法 |
| JP5865689B2 (ja) * | 2011-12-08 | 2016-02-17 | 富士通株式会社 | 探知測距装置および角度推定方法 |
| JP2014115137A (ja) * | 2012-12-07 | 2014-06-26 | Fujitsu Ten Ltd | レーダ装置、及び、信号処理方法 |
-
2014
- 2014-10-09 JP JP2014208417A patent/JP6362262B2/ja active Active
-
2015
- 2015-10-08 DE DE102015219483.3A patent/DE102015219483B4/de active Active
- 2015-10-08 US US14/878,846 patent/US10852410B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20160103207A1 (en) | 2016-04-14 |
| DE102015219483B4 (de) | 2023-06-15 |
| JP2016080369A (ja) | 2016-05-16 |
| DE102015219483A1 (de) | 2016-04-14 |
| US10852410B2 (en) | 2020-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6362262B2 (ja) | 角度推定装置および角度推定方法 | |
| EP3721258B1 (en) | Radar processing chain for fmcw radar systems | |
| JP5659472B2 (ja) | 到来方向推定装置及び方法 | |
| US10379204B2 (en) | Method for calibrating a MIMO radar sensor for motor vehicles | |
| CN109407093B (zh) | 解决宽孔径雷达到达角模糊度的多普勒测量 | |
| CN110018452B (zh) | 使用虚拟接收信号的生成来估计到达方向的方法和设备 | |
| US10389421B2 (en) | Apparatus for estimating arrival-angle and apparatus for beam-forming | |
| US9470782B2 (en) | Method and apparatus for increasing angular resolution in an automotive radar system | |
| EP3227703B1 (en) | Methods and systems for spectral analysis of sonar data | |
| JP5617334B2 (ja) | レーダ装置及び目標探知方法 | |
| EP3019888B1 (en) | Interference nulling of multipath signals in stacked beam pulse radar | |
| CN106486769B (zh) | 用于线性相控阵天线的空间插值方法和设备 | |
| JP4794613B2 (ja) | 信号波到来角度測定装置 | |
| KR101953697B1 (ko) | 균일 선형 배열 안테나 기반의 가상 수신신호 생성을 이용한 도래각 추정 방법 및 장치 | |
| CN107390197A (zh) | 基于特征空间的雷达自适应和差波束测角方法 | |
| JP2017036990A (ja) | 到来方向推定装置 | |
| US20070064537A1 (en) | Method for Improved Sonar Velocity Processing | |
| KR20190140362A (ko) | 레이더 시스템의 신호 개수 추정 방법 및 장치 | |
| US11585892B1 (en) | Calibration for multi-channel imaging systems | |
| GB2516064A (en) | Improvements in and relating to radar | |
| RU2581898C1 (ru) | Способ измерения угловых координат цели | |
| JP5950534B2 (ja) | 超音波距離画像生成装置 | |
| Zhang et al. | A Novel Self‐Calibration Method for Acoustic Vector Sensor | |
| EP2824477A1 (en) | Interference nulling of multipath signals in stacked beam pulse radar | |
| Bruna et al. | Cramer-Rao Lower Bound assessment when using bistatic clutter mitigation techniques |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180423 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180529 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20180613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180613 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180625 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6362262 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |