JP6335576B2 - 秤量セルにおけるデジタル線形化 - Google Patents
秤量セルにおけるデジタル線形化 Download PDFInfo
- Publication number
- JP6335576B2 JP6335576B2 JP2014065641A JP2014065641A JP6335576B2 JP 6335576 B2 JP6335576 B2 JP 6335576B2 JP 2014065641 A JP2014065641 A JP 2014065641A JP 2014065641 A JP2014065641 A JP 2014065641A JP 6335576 B2 JP6335576 B2 JP 6335576B2
- Authority
- JP
- Japan
- Prior art keywords
- coil
- force
- weight
- displacement
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005303 weighing Methods 0.000 title claims description 91
- 238000012546 transfer Methods 0.000 claims description 56
- 238000000034 method Methods 0.000 claims description 53
- 230000005540 biological transmission Effects 0.000 claims description 52
- 238000006073 displacement reaction Methods 0.000 claims description 52
- 238000005259 measurement Methods 0.000 claims description 47
- 238000012545 processing Methods 0.000 claims description 27
- 238000004590 computer program Methods 0.000 claims description 15
- 230000007246 mechanism Effects 0.000 claims description 5
- 230000001419 dependent effect Effects 0.000 claims description 3
- 230000002596 correlated effect Effects 0.000 claims description 2
- 230000006870 function Effects 0.000 description 46
- 238000005452 bending Methods 0.000 description 16
- 238000004364 calculation method Methods 0.000 description 16
- 230000000875 corresponding effect Effects 0.000 description 11
- 230000006399 behavior Effects 0.000 description 10
- 238000004519 manufacturing process Methods 0.000 description 10
- 230000000694 effects Effects 0.000 description 9
- 239000012212 insulator Substances 0.000 description 9
- 238000013459 approach Methods 0.000 description 8
- 230000009467 reduction Effects 0.000 description 6
- 230000036962 time dependent Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000015654 memory Effects 0.000 description 4
- 230000006872 improvement Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000001447 compensatory effect Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000007620 mathematical function Methods 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002277 temperature effect Effects 0.000 description 2
- 208000037063 Thinness Diseases 0.000 description 1
- 108010074506 Transfer Factor Proteins 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 206010048828 underweight Diseases 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
- 230000003936 working memory Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G7/00—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups
- G01G7/02—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G3/00—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances
- G01G3/12—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances wherein the weighing element is in the form of a solid body stressed by pressure or tension during weighing
- G01G3/14—Weighing apparatus characterised by the use of elastically-deformable members, e.g. spring balances wherein the weighing element is in the form of a solid body stressed by pressure or tension during weighing measuring variations of electrical resistance
- G01G3/1414—Arrangements for correcting or for compensating for unwanted effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G7/00—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups
- G01G7/02—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action
- G01G7/04—Weighing apparatus wherein the balancing is effected by magnetic, electromagnetic, or electrostatic action, or by means not provided for in the preceding groups by electromagnetic action with means for regulating the current to solenoids
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Testing Of Balance (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Description
F’=f(I)=k×I
F’:秤量対象である質量mの算出された重量力
K:伝達定数
I:コイル電流
伝達定数kは、各タイプの秤量セルごとに設計で指定され、補償力の算出を目的として処理ユニットに格納される。換言すれば、伝達定数は、秤量セルの荷重受けシステムにより決定され、測定されたコイル電流の力F’への変換を記述する。
F’=f(I、T、t)
伝達関数とも呼ばれるこの関数は、コイル電流の信号および種々の温度センサの信号を、ディスプレイ上に表示される時間依存性出力値へと変換する役割を果たす。したがって、伝達定数は、伝達関数の一部となる。コイル電流は、以下の関数に従って位置制御ユニットにより調整される。
I=f(F、z、T、t)
これは、温度効果(T)および動的効果(t)に加えて、可能である干渉パラメータ(z)をさらに考慮に入れる。
重量超過製品および重量不足製品を検査すること、
包装された商品の正味内容量に関する法的要件に準拠すること、
重量選別機により収集された重量データを使用して充填マシンの設定を調節することにより、製品廃棄を削減すること、
重量により製品を分類すること、
生産施設または生産ラインの性能を測定および記録すること、
重量に基づきピース総数を確認すること
などを含む、多様な用途において使用される。
さらに、本発明の目的は、強力な振動および/または周囲環境に由来する振動の存在下において正確な秤量結果を迅速に得ることを可能にすることである。
印加荷重の重量を判定するこの方法は、電磁力補償の原理により動作し、磁石システム内に可動的に挿入され電流を帯びることが可能であるコイルを備える測定変換器を備える、力測定デバイスにおいて実施されるように設計される。この力測定デバイスは、荷重受け部と測定変換器のコイルまたは磁石システムとの間の力伝達機械連結部と、荷重受け部上に荷重を加えた結果として発生する、磁石システムに対する整定位置からのコイルの変位を判定する役割を果たす位置センサとをさらに備える。コイルを流れる電流は、コイルと磁石システムとの間に電磁力を発生させる機能を有し、これにより、コイルおよびコイルまたは磁石システムに対して連結された荷重受け部は、整定位置へと戻されるおよび/または整定位置に保持される。電流の規模および整定位置からのコイルの変位量が、印加荷重の重量力を判定するために使用される。
本発明の別の有利な実施形態においては、伝達関数の少なくとも1つのパラメータは、荷重依存性である。
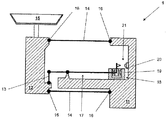
図1は、力測定デバイス1の力測定セルを側方からの断面図において概略的に示す。固定部11を介して、力測定デバイス1は、支持構造体上に取り付けられる。2つの平行ガイド14により固定部11に対して連結された荷重受け部12は、秤量荷重物が配置される秤量皿15を担持する。平行ガイド14は、屈曲ピボット16により、荷重受け部12に対しておよび固定部11に対して連結される。屈曲ピボットが、回転軸を規定するが、屈曲ピボットは、この回転軸に対する任意の横軸方向において、特に剛性の力伝達要素として挙動する。力測定デバイス1は、秤量皿が上部に位置する図示する構成には限定されず、秤量皿が下方に配置されるように、また殆どの場合においてはハンガーにより懸吊されるように、構成することも可能である。継手13は、支点により支持された秤竿17の第1の梃子アームに対して重量力を伝達する。秤竿17の第2の梃子アームの外端である他方の端部には、補償力25を発生させることにより梃子軽減された重量力を相殺する測定変換器18が配置される。ここで図示される測定変換器18は、磁石システム19内に可動的に挿入された導電コイル20として示される。測定変換器18により発生し第2の梃子アームに対して作用する補償力25が、第1の梃子アームに対して作用する重量力に対応する場合には、秤竿17は、均衡状態になり、したがって整定位置に置かれる。この整定位置は、位置センサ21によりモニタリングされる。
F=f(I、T、t)
の形の等式により算出される。ここでは、コイル電流24および温度関連因子は、独立パラメータとしてこの計算に入力される。さらに、この計算は、起動局面時にまたは荷重の変化により発生する動的効果を補償するための時間依存動作を含む。この態様は、所与のタイプの力測定セルに固有である、および因子の中でもとりわけコイル20の補償力25から荷重受け部12上に配置された重量力または質量への変換に関する秤竿17の梃子比を含む、定数を有する伝達関数において対処される。秤竿17または力伝達ロッド117が整定位置に厳密に位置する場合にのみではなく継続的に、表示パネル上に表示値27を示すために、最新技術の力測定デバイスにおける表示値27は、電子的にフィルタをかけられ、すなわち、時間依存平均値が、伝達関数により形成される。コイル電流は、以下の関数、すなわち
I=f(F、z、T、t)
に従って位置制御ユニットにより調整される。また、この関数は、温度(T)および動的効果(t)の影響に加えて、起こり得る擾乱量(z)を考慮に入れる。
F=f(x、I、T、t)
に基づく。ここで、温度Tおよび表示値の算出タイミングは、表示値27に対する影響をやはり有する。したがって、力測定デバイス1は、整定位置からのコイル20、120の変位を表示値27の算出に入力することも可能であり、その結果、例えば磁石システム19、119の不均質性、ならびに平行ガイド14、114における、特に屈曲ピボット16におけるまたは弾性リンクもしくはダイヤフラムにおける位置測定の、あるいは梃子軽減の非線形性などの、非線形性を考慮に入れることも可能となる。これは、表示値27の算出において考慮される位置信号22、22’についての定量値を向上させるが、位置制御ユニット23により実施される調整機能には影響を及ぼさない。
100 直接測定システムの力測定セル
11、111 固定部
12、112 荷重受け部
13 継手部材
14、114 平行ガイド
15 秤量皿
16 屈曲ピボット
17 秤竿
117 力伝達ロッド
18、118 測定変換器
19、119 磁石システム
20、120 コイル
21 位置センサ
22、22’ 位置信号
23 位置制御ユニット
24 コイル電流の規模、電流強度
25 補償力
26 処理ユニット
27 表示値
28 追加の位置センサ
30 伝達手段
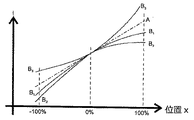
A 理想化されたシステム−特徴曲線
Bi、B1、B2、B3 実際の現実ベースのシステム−特徴曲線
I0 秤竿の整定位置におけるコイル電流
IA 理想化されたシステム−特徴曲線に従って動作する際のコイル電流
IB 実際の現実ベースのシステム−特徴曲線に従って動作する際のコイル電流
IAm 理想化されたシステム−特徴曲線に従って動作する際のコイル電流の平均値
IBm 実際の現実ベースのシステム−特徴曲線に従って動作する際のコイル電流の平均値
F 荷重受け部に対して作用する力
F’ 力の算出値
x 秤竿の位置
z 擾乱量
Ti 温度信号
t 伝達関数の時間変数
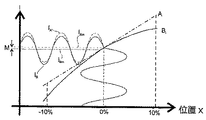
M 平均値の逸脱
F’A 先行技術の重量選別機の表示値27の信号グラフ
F’B 本発明の重量選別機の表示値27の信号グラフ
F’M 目標終値から逸脱する直線セクション
F’Am 先行技術の重量選別機の表示値27のフィルタリングされた信号
F’Bm 本発明の重量選別機の表示値27のフィルタリングされた信号
tA 先行技術の重量選別機に関する許容帯域内への到達時間
tB 本発明の重量選別機に関する許容帯域内への到達時間
Claims (15)
- 磁石システム(19、119)に対して可動になるように前記磁石システム(19、119)内に配置され電流(24)を帯びることが可能であるコイル(20、120)を備える、測定変換器(18、118)と、
荷重受け部(12、112)と前記測定変換器(18、118)の前記コイル(20、120)または前記磁石システム(19、119)との間の力伝達機械連結部と、
前記荷重受け部(12、112)上に荷重を加えた結果として発生する、前記磁石システム(19、119)に対する整定位置からの前記コイル(20、120)の変位を判定する役割を果たす位置センサ(21、28)であって、前記コイル(20、120)を流れる前記電流(24)は、前記コイル(20、120)と前記磁石システム(19、119)との間に電磁力を発生させる機能を有し、これにより、前記コイル(20、120)および前記コイル(20、120)または前記磁石システム(19、119)に対して連結された前記荷重受け部(12、112)は、前記整定位置へと戻されるおよび/または前記整定位置に保持される、位置センサ(21、28)と
を備える、電磁力補償の原理により作動する力測定デバイス(1)上に、荷重により印加される重量力を測定する方法において、
前記電流(24)の規模および前記整定位置からの前記コイル(20、120)の変位量が、前記印加される荷重により加えられる前記重量力を判定するために使用されることを特徴とする、方法。 - 請求項1に記載の重量力を判定する方法において、
前記整定位置からの前記コイル(20、120)の前記変位量は、位置制御ユニット(23)に対して入力信号を供給する前記同一の位置センサ(21)により判定され、前記位置制御ユニット(23)は、前記コイル(20、120)および前記コイル(20、120)または前記磁石システム(19、119)に対して連結された前記荷重受け部(12、112)が、前記コイル(20、120)と前記磁石システム(19、119)との間の前記電磁力により前記整定位置へと戻されるように、前記コイル(20、120)を通る前記電流(24)を調整することを特徴とする、方法。 - 請求項1に記載の重量力を判定する方法において、
前記整定位置からの前記コイル(20、120)の前記変位量は、追加の位置センサ(28)により判定されることを特徴とする、方法。 - 請求項1から3のいずれか一項に記載の重量力を判定する方法において、
前記荷重により加えられる前記重量力を判定するために、処理ユニット(26)に格納され、前記電流(24)の前記規模および前記整定位置からの前記コイル(20、120)の前記変位量を前記重量力の判定に結び付ける、算術命令を含む、伝達手段(30)が使用されることを特徴とする、方法。 - 請求項4に記載の重量力を判定する方法において、
前記伝達手段(30)は、前記整定位置からの前記コイル(20、120)の前記変位量の値と、前記電気コイル電流(24)の前記規模の値とが、前記印加される荷重の前記重量力の値に相互に関係づけられる、伝達テーブルとして格納される、および/または、前記伝達手段(30)は、少なくとも1つのパラメータを有し、少なくとも前記電気コイル電流(24)の前記規模と前記整定位置からの前記コイル(20、120)の前記変位量とを入力量として使用する、伝達関数として格納されることを特徴とする、方法。 - 請求項5に記載の重量力を判定する方法において、
前記伝達関数の前記少なくとも1つのパラメータは、パラメータテーブルとしておよび/またはシステム−特徴曲線として格納されることを特徴とする、方法。 - 請求項5または6に記載の重量力を判定する方法において、
前記伝達関数の前記少なくとも1つのパラメータは、荷重依存性であることを特徴とする、方法。 - 請求項5から7のいずれか一項に記載の重量力を判定する方法において、
前記伝達テーブルの前記値および/または前記伝達関数の前記少なくとも1つのパラメータは、前記コイル(20、120)の前記変位を変更し、実質的に同時に前記コイルの前記変位に関連付けられる前記電気コイル電流(24)の前記規模を測定することにより、および/または、前記電気コイル電流(24)の前記規模を変更し、実質的に同時に前記電気コイル電流(24)の前記規模に関連付けられる前記コイル(20、120)の前記変位を測定することにより、および/または、振動の存在下において前記電気コイル電流(24)の前記規模に対する前記コイル(20、120)の前記変位を分析することにより、決定されることを特徴とする、方法。 - 請求項8に記載の重量力を判定する方法において、
前記伝達テーブルの前記値の前記決定および/または前記伝達関数の前記少なくとも1つのパラメータの前記決定は、前記荷重受け部(12、112)に加えられる重量がある状態およびない状態の両方においてなされ、前記重量は、外部から前記荷重受け部(12、112)に対して加えられる重量か、または機構により内部的に加えられ得る重量のいずれかであることが可能であることを特徴とする、方法。 - 請求項4から9のいずれか一項に記載の重量力を判定する方法において、
前記伝達手段(30)は、各力測定デバイス(1)に対して個別に、または同一タイプの力測定デバイス(1)に対して汎用的に生成されることを特徴とする、方法。 - 請求項1から10のいずれか一項による重量力を判定するように動作可能である重量測定型力測定デバイス(1)用の、電磁力補償の原理により機能する力測定セル。
- 電磁力補償の原理により動作する重量測定型力測定デバイス(1)において請求項1から10のいずれか一項に記載の重量力を判定する方法を実装するためのコンピュータプログラムであって、前記重量力(F)の表示値(27)が、前記プログラムの出力として生成され、少なくとも前記電気コイル電流(24)の前記規模および前記整定位置からの前記コイル(20、120)の前記変位量は、入力として使用される、コンピュータプログラム。
- 重量力を判定する前記方法を実装するための請求項12に記載のコンピュータプログラムにおいて、
時間信号および少なくとも1つの温度信号が、入力量として追加的に使用されることを特徴とする、コンピュータプログラム。 - 重量力を判定する前記方法を実装するための請求項12または13に記載のコンピュータプログラムにおいて、
前記コンピュータプログラムは、請求項3から10のいずれか一項に記載の伝達手段(30)を呼び出すことを特徴とする、コンピュータプログラム。 - 秤量対象を搬入するための送込みコンベヤベルトと、前記秤量対象を搬出するための送出しコンベヤベルトと、力測定デバイス(1)に対して連結された秤量コンベヤベルトとを備える、対象を秤量する役割を果たす重量選別システムにおいて、
重量力の判定が、請求項12から14のいずれか一項に記載のコンピュータプログラムにより端末において実施されることを特徴とする、重量選別システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13161569.2A EP2784453B1 (de) | 2013-03-28 | 2013-03-28 | Digitale Wägezellenlinearisierung |
| EP13161569.2 | 2013-03-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014197001A JP2014197001A (ja) | 2014-10-16 |
| JP6335576B2 true JP6335576B2 (ja) | 2018-05-30 |
Family
ID=48013828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014065641A Active JP6335576B2 (ja) | 2013-03-28 | 2014-03-27 | 秤量セルにおけるデジタル線形化 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20140291040A1 (ja) |
| EP (1) | EP2784453B1 (ja) |
| JP (1) | JP6335576B2 (ja) |
| CN (1) | CN104075783B (ja) |
| PL (1) | PL2784453T3 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104697614A (zh) * | 2015-03-12 | 2015-06-10 | 南车株洲电力机车有限公司 | 一种磁悬浮列车荷载信息生成系统 |
| EP3203180B1 (en) * | 2016-02-04 | 2018-12-05 | Mettler-Toledo GmbH | Apparatus and methods for dimensioning an object carried by a vehicle moving in a field of measurement |
| US10883911B2 (en) * | 2016-02-04 | 2021-01-05 | Nanyang Technological University | Method and arrangement for determining at least one pore-related parameter of a porous structure |
| DE102017127690B4 (de) * | 2017-11-23 | 2023-03-02 | Sartorius Lab Instruments Gmbh & Co. Kg | Verfahren zur Generierung eines Ergebniswertes in einer elektromagnetisch kompensierenden Wägevorrichtung |
| CN110702194A (zh) * | 2019-07-29 | 2020-01-17 | 辽宁维森信息技术股份有限公司 | 带自动补偿功能的高速称重的控制器及控制方法 |
| CN114543955B (zh) * | 2020-11-25 | 2024-04-09 | 菜鸟智能物流控股有限公司 | 称重设备、称重处理方法、装置、设备和机器可读介质 |
| CN117075568B (zh) * | 2023-10-18 | 2024-01-05 | 绵阳沃思测控技术有限公司 | 一种基于连续监测的配料控制系统 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5723825A (en) * | 1980-07-17 | 1982-02-08 | Shimadzu Corp | Electronic direct indication balance |
| JPS62133321A (ja) * | 1985-12-05 | 1987-06-16 | Yamato Scale Co Ltd | 計重コンベヤの動的計重値の補正装置 |
| JPS62193528U (ja) * | 1986-05-30 | 1987-12-09 | ||
| US4802541A (en) * | 1988-03-11 | 1989-02-07 | Pitney Bowes Inc. | Weighing scale with voice coil |
| DE3829637C1 (ja) | 1988-09-01 | 1990-04-12 | Sartorius Gmbh, 3400 Goettingen, De | |
| JP3312626B2 (ja) | 1989-12-01 | 2002-08-12 | 株式会社石田衡器製作所 | ロードセル型重量測定装置 |
| JP2518125B2 (ja) * | 1992-05-28 | 1996-07-24 | 株式会社島津製作所 | 電子天びん |
| JP3620168B2 (ja) * | 1996-09-30 | 2005-02-16 | 株式会社島津製作所 | 電子天びん |
| DE10046205C2 (de) * | 2000-09-13 | 2002-09-12 | Francotyp Postalia Ag | Verfahren zur Steuerung einer schnellen dynamischen Waage |
| US6759602B2 (en) * | 2001-05-08 | 2004-07-06 | Pitney Bowes Inc. | Apparatus and method for weighing mailpieces in motion |
| US7247801B2 (en) | 2002-06-07 | 2007-07-24 | Pitney Bowes Inc. | System and method for fast weighing of items such as mailpieces |
| DE102004054999B3 (de) * | 2004-11-15 | 2006-03-30 | Francotyp-Postalia Gmbh | Verfahren zum Wiegen von bewegtem Postgut |
| DE102010009431A1 (de) * | 2010-02-24 | 2011-08-25 | Francotyp-Postalia GmbH, 16547 | Schnelle dynamische Waage und Verfahren zur Steuerung einer schnellen dynamischen Waage |
| JP5658594B2 (ja) * | 2011-02-24 | 2015-01-28 | アンリツ産機システム株式会社 | 計量装置 |
-
2013
- 2013-03-28 EP EP13161569.2A patent/EP2784453B1/de active Active
- 2013-03-28 PL PL13161569T patent/PL2784453T3/pl unknown
-
2014
- 2014-03-27 JP JP2014065641A patent/JP6335576B2/ja active Active
- 2014-03-27 CN CN201410119771.2A patent/CN104075783B/zh active Active
- 2014-03-28 US US14/228,861 patent/US20140291040A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CN104075783B (zh) | 2019-06-18 |
| JP2014197001A (ja) | 2014-10-16 |
| CN104075783A (zh) | 2014-10-01 |
| EP2784453B1 (de) | 2018-10-10 |
| US20140291040A1 (en) | 2014-10-02 |
| PL2784453T3 (pl) | 2019-04-30 |
| EP2784453A1 (de) | 2014-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6335576B2 (ja) | 秤量セルにおけるデジタル線形化 | |
| US10132672B2 (en) | Digital linearization in a weighing cell | |
| JP6212313B2 (ja) | 送り錘を有する力測定デバイス | |
| US7282655B2 (en) | Electronic balance having a position control mechanism | |
| US20090242279A1 (en) | Electronic scale comprising an inclinometer and corresponding signal evaluation method | |
| US7964806B2 (en) | Electronic scale comprising a bubble level | |
| JP2012533743A (ja) | 力測定装置の温度補償方法及び力測定装置 | |
| EP1531134A1 (en) | Vibrating transport apparatus and method of detecting vibration characteristic | |
| US20060161386A1 (en) | Weighing system using electromagnetic force compensation | |
| US4129189A (en) | Weight control system | |
| JPH0568645B2 (ja) | ||
| US3142349A (en) | Dynamically compensated weighing scales | |
| CN104121970B (zh) | 一种电子皮带秤的信号处理方法 | |
| CN107091677B (zh) | 一种误差补偿方法与基于误差补偿的皮带秤 | |
| JP3834141B2 (ja) | 物品の振動式搬送装置 | |
| JP3836969B2 (ja) | 物品の振動式搬送装置 | |
| US11274960B2 (en) | Calibration and support platform for calibration weights on a conveyor and metering device | |
| USRE28303E (en) | Iiynamically compensated weighing scales | |
| JPH07294317A (ja) | 電子天びん | |
| US559374A (en) | Price-scale | |
| US1339759A (en) | Scale | |
| JPH0577969B2 (ja) | ||
| US1251016A (en) | Automatic weight-indicating attachment for beam-scales. | |
| JP2002174545A (ja) | フォースバランス秤 | |
| US1130155A (en) | Weighing-machine. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171011 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180501 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6335576 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |