JP6317450B2 - 車両ホイールの路面グリップのロスを検出するための加速度センサ、特に二重化された加速度センサ、装置、及び方法 - Google Patents
車両ホイールの路面グリップのロスを検出するための加速度センサ、特に二重化された加速度センサ、装置、及び方法 Download PDFInfo
- Publication number
- JP6317450B2 JP6317450B2 JP2016539460A JP2016539460A JP6317450B2 JP 6317450 B2 JP6317450 B2 JP 6317450B2 JP 2016539460 A JP2016539460 A JP 2016539460A JP 2016539460 A JP2016539460 A JP 2016539460A JP 6317450 B2 JP6317450 B2 JP 6317450B2
- Authority
- JP
- Japan
- Prior art keywords
- acceleration sensor
- vehicle wheel
- vehicle
- weight
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001133 acceleration Effects 0.000 title claims description 234
- 238000000034 method Methods 0.000 title claims description 38
- 230000004913 activation Effects 0.000 claims description 12
- 230000005291 magnetic effect Effects 0.000 claims description 5
- 238000012795 verification Methods 0.000 claims description 4
- 230000008859 change Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 7
- 238000011156 evaluation Methods 0.000 description 6
- 238000012360 testing method Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 239000004033 plastic Substances 0.000 description 5
- 238000011161 development Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 239000003302 ferromagnetic material Substances 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 230000005483 Hooke's law Effects 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000002730 additional effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 210000002304 esc Anatomy 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/172—Determining control parameters used in the regulation, e.g. by calculations involving measured or detected parameters
- B60T8/1725—Using tyre sensors, e.g. Sidewall Torsion sensors [SWT]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
- B60T8/1761—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS responsive to wheel or brake dynamics, e.g. wheel slip, wheel acceleration or rate of change of brake fluid pressure
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0891—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values with indication of predetermined acceleration values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/105—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by magnetically sensitive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/135—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by making use of contacts which are actuated by a movable inertial mass
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/10—Detection or estimation of road conditions
- B60T2210/12—Friction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
- B60T2210/10—Detection or estimation of road conditions
- B60T2210/13—Aquaplaning, hydroplaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2240/00—Monitoring, detecting wheel/tire behaviour; counteracting thereof
- B60T2240/03—Tire sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- Regulating Braking Force (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Tires In General (AREA)
Description
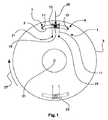
上記加速度センサは、
円弧セグメントを形成する長手方向の軸と、2つの閉じた端部とを有するチューブと、
上記チューブの内側においてその長手方向に移動できるように、上記チューブの内側に配置された重りと、
上記重りにはたらく磁力によって、上記重りのアイドル位置からの移動を打ち消すように構成された磁石装置と、
上記重りの上記アイドル位置からの移動を検出するように構成された読み出し装置とを備える。
上記チューブは、好ましくは、上記車両ホイールの加速度が(上記車両ホイールの回転方向に)変化したときに上記重りの上記アイドル位置からの移動が生じるように、上記車両ホイールに配置される。
a.個々のホイールの加速度の変化の検出及び表示は、直接的かつ直ちには行われず、他の信号の評価又は他の信号からの導出によって、又は他の信号に基づく計算によって間接的に行われる。しかしながら、慣性センサとして、本発明に係るセンサは、路面グリップのロスを示す個々のホイールの加速度の変化を、直接的かつ直ちに決定する。
b.例えば特許文献12のように、増大したバックグラウンドノイズに起因して個々のホイールの非常に短い不適切な回転挙動が単に見逃される場合、路面グリップの決定的に危険なロスの状況が高速度域(80〜200km/h)で生じる。しかしながら、本発明に係る直接式トルクセンサは、高速時においても、その感度をほとんど維持する。
c.この速度範囲では、ほとんどの場合、路面グリップの完全なロスが生じ、ESPさえも残念ながらいかなる成功した効果を生じることもできない。
上記加速度センサは、
円弧セグメントに沿って移動可能に配置された重りと、
上記重りのアイドル位置からの移動を打ち消すように構成された少なくとも1つのバネ素子と、
上記重りの上記アイドル位置からの移動を検出するように構成された読み出し装置とを備え、
上記重りは、好ましくは、上記車両ホイールの加速度が好ましくは上記車両ホイールの回転方向に変化したときに上記重りの上記アイドル位置からの移動が生じるように、上記車両ホイールに配置される。
従って、加速度センサの寿命がタイヤの寿命に対応すれば十分である。
上記装置は、
車両ホイールに配置された第1の加速度センサ、特に上述したタイプの加速度センサと、
上記加速度センサによって路面グリップのロスが検出された場合、路面グリップのロスを車両運転者に通知するように構成された警告装置とを備える。
a.規則的な時間間隔で、車両ホイールのうちの1つ又は複数の加速を行うように、特に危険な運転状況(例えば、雨センサがトリガされるか、又は概して摂氏3°未満の温度のとき)において自動的に行うように構成される。
b.上述の実施形態の好ましい別の開発は、特に疑わしい運転状況(例えば、雨天かつ160km/hの速度のとき、発明者が自身の運転スタイルについて記述せず、そのような速度から距離を置いている場合)において、車両運転者により起動されたとき、少なくとも1つの車両ホイールの加速を行うために制御装置にテスト加速度信号を送るように構成された起動素子を備える。好ましくは、起動素子は、車両コックピットのダッシュボードに配置され、車両運転者が路面における1つ又は複数の車両ホイールの路面グリップのテストを希望する場合、車両運転者によって押されることが可能な押しボタンとして構成される。起動素子は、手動の起動素子として、及び/又は、制御装置の一部として構成されてもよい。
上記方法は、
a)車両ホイールに配置された加速度センサ、特に上述のタイプの加速度センサによって路面グリップのロスが検出されたとき、上記車両ホイールの路面グリップのロスを検証することを含み、
上記検証は、
i.車両ブレーキ及び/又は車両エンジンにより上記車両ホイールを加速することと、
ii.上記加速度センサにより加速中の路面グリップのロスを検出することと
によって実行され、
上記方法は、
b)上記検証された路面グリップのロスを警告装置により車両運転者に通知することを含む。
上記方法は、
a)運転者によって起動素子が起動されたとき、車両ブレーキ及び/又は車両エンジンにより車両ホイールを加速することと、
b)加速中に、加速度センサ、特に上述したタイプの加速度センサによって、上記車両ホイールの路面グリップのロスを検出することとを含む。
3…車両ホイール、
5…チューブ、
7,9…端部、
11,13…接触面、
15…ボール、
17…コイル、
19…コイル線、
21,23…接点、
25…アイドル位置、
27…回転方向、
29…第2の加速度センサ(二重化のための加速度センサ)、
31…中心、
201…加速度センサ、
203,205…コイル、
301…加速度センサ、
315…ボール、
317…コイル、
401…加速度センサ、
403…チャンバ、
405…重り、
407…棒、
409…セグメント
411,413…コイルばね、
415,417…内壁、
419,421…接触面、
425…アイドル位置、
427,429…端部、
431…第2の加速度センサ、
433…回転方向、
501…加速度センサ、
505…重り、
509…ヘッドの重り、
519…接触面、
601…装置、
603…制御装置、
605…評価装置、
607…評価電子回路、
608…読み出し装置、
609…車両運転者、
611…ディスプレイ、
613…電源、
615…車両ステアリングホイール、
617…起動素子、
619…制御装置。
Claims (18)
- 車両ホイール(3)の路面グリップのロスを検出するための加速度センサであって、
円弧セグメントを形成する長手方向の軸と、2つの閉じた端部(7,9)とを有するチューブ(5)と、
上記チューブ(5)の内側においてその長手方向に移動できるように、上記チューブ(5)の内側に配置された重り(15;315)と、
上記重り(15;315)にはたらく磁力によって、上記重り(15;315)のアイドル位置(25)からの移動を打ち消すように構成された磁石装置(17;203;205;317)と、
上記重り(15;315)の上記アイドル位置(25)からの移動を検出するように構成された読み出し装置(608)とを備え、
上記チューブ(5)は、上記車両ホイールの加速度が変化したときに上記重りの上記アイドル位置からの移動が生じるように、上記車両ホイールに配置される加速度センサ。 - 上記磁石装置(17;203;205;317)は、少なくとも部分的に上記チューブ(5)を包囲する電気的コイル装置を備える請求項1記載の加速度センサ。
- 上記電気的コイル装置は円弧コイルを備える請求項2記載の加速度センサ。
- 車両ブレーキ及び車両エンジンにより上記車両ホイール(3)に与えられた加速度に依存して上記電気的コイル装置(17;203;205;317)によって上記重り(15;315)にはたらかされる力を制御するように構成された制御装置(603)を備えた請求項2又は3記載の加速度センサ。
- 上記磁石装置は、上記重り(15;315)に引力をはたらかせるように構成された磁石セクション(17;317)を備え、
上記重り(15)のアイドル位置(25)は、上記磁石セクション(17;317)内において上記車両ホイール(3)の回転方向(27)にある請求項1〜4のうちの1つに記載の加速度センサ。 - 上記磁石装置は、上記重り(15)に斥力をはたらかせるように構成された2つの磁石セクション(203;205)を備え、
上記重り(15)のアイドル位置(25)は、上記磁石セクション(203;205)内において上記車両ホイール(3)の回転方向にある請求項1〜5のうちの1つに記載の加速度センサ。 - 上記読み出し装置(608)は、上記チューブ(5)の端部(7;9)にそれぞれ配置された接触面(11;13)を備え、
上記読み出し装置(608)は、上記重り(15)及び上記接触面(11;13)の間の接触を検出するように構成される請求項1〜6のうちの1つに記載の加速度センサ。 - 車両ホイール(3)の路面グリップのロスを検出するための加速度センサであって、
円弧セグメントに沿って移動可能であるように配置された重り(405;505)と、
上記重り(405;505)のアイドル位置(425)からの移動を打ち消すように構成された少なくとも1つのバネ素子(411;413)と、
上記重り(405;505)の上記アイドル位置からの移動を検出するように構成された読み出し装置(608)とを備え、
上記重り(405;505)は、上記車両ホイールの加速度が変化したときに上記重りの上記アイドル位置からの移動が生じるように、上記車両ホイールに配置される加速度センサ。 - 上記重り(405;505)は、上記円弧セグメントの中心において振り子のように取り付けられる請求項8記載の加速度センサ。
- 車両ホイールの路面グリップのロスを検出するための装置であって、
車両ホイール(3)に配置された第1の加速度センサであって、請求項1〜9のうちの1つに記載の第1の加速度センサ(1;201;301;401;501)と、
上記加速度センサ(1;201;301;401;501)によって路面グリップのロスが検出されたとき、上記路面グリップのロスを車両運転者(609)に通知するように構成された警告装置(611)とを備えた装置。 - 上記車両ホイール(3)において、上記第1の加速度センサ(1;401)の反対側に配置された二重化のための第2の加速度センサであって、請求項1〜9のうちの1つに記載の第2の加速度センサ(29;431)が配置される請求項10記載の装置。
- 二重化のための上記第2の加速度センサ(29;431)は、上記車両ホイール(3)において、上記円弧セグメントの中心(31)に関連付けて配置される請求項11記載の装置。
- 少なくとも1つの車両ホイール(3)の加速を行うために車両ブレーキ及び/又は車両エンジンを制御するように構成された制御装置(619)を備える請求項10〜12のうちの1つに記載の装置。
- 車両運転者(609)により起動されたとき、少なくとも1つの車両ホイール(3)の加速を行うために上記制御装置(619)に加速信号を送るように構成された起動素子(617)を備える請求項13記載の装置。
- 車両ホイールの路面グリップのロスを検出するための方法であって、
上記方法は、
a)車両ホイール(3)に配置された加速度センサであって、請求項1〜9のうちの1つに記載の加速度センサ(1;201;301;401;501)によって路面グリップのロスが検出されたとき(A)、上記車両ホイール(3)の路面グリップのロスを検証すること(B)を含み、
上記検証は、
i.車両ブレーキ及び/又は車両エンジンにより上記車両ホイール(3)を加速することと、
ii.上記加速度センサ(1)により加速中の路面グリップのロスを検出することとによって実行され、
上記方法は、
b)上記検証された路面グリップのロスを警告装置(611)により車両運転者(609)に通知すること(C)を含む方法。 - 車両ホイールの路面グリップのロスを検出するための方法であって、
上記方法は、
a)運転者(609)によって起動素子(617)が起動された(AA)とき、車両ブレーキ及び/又は車両エンジンにより車両ホイール(3)を加速すること(BB)と、
b)加速中に、請求項1〜9のうちの1つに記載の加速度センサ(1;201;301;401;501)によって、上記車両ホイール(3)の路面グリップのロスを検出すること(CC)とを含む方法。 - 上記車両ホイール(3)の加速(BB)は、変化する強度を有する後続の複数の加速によって行われる請求項16記載の方法。
- 上記車両ホイール(3)の加速(BB)は、増大する強度を有する後続の複数の加速によって行われる請求項17記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201310217478 DE102013217478A1 (de) | 2013-09-03 | 2013-09-03 | Beschleunigungssensor, Anordnung und Verfahren zum Detektieren eines Haftungsverlusts eines Fahrzeugrades |
| DE102013217478.0 | 2013-09-03 | ||
| PCT/EP2014/067585 WO2015032613A2 (de) | 2013-09-03 | 2014-08-18 | Beschleunigungssensor, insbesondere duplex-beschleunigungssensor, anordnung und verfahren zum detektieren eines haftungsverlusts eines fahrzeugrades |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016532120A JP2016532120A (ja) | 2016-10-13 |
| JP2016532120A5 JP2016532120A5 (ja) | 2017-06-15 |
| JP6317450B2 true JP6317450B2 (ja) | 2018-04-25 |
Family
ID=51399639
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016539460A Active JP6317450B2 (ja) | 2013-09-03 | 2014-08-18 | 車両ホイールの路面グリップのロスを検出するための加速度センサ、特に二重化された加速度センサ、装置、及び方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US9989554B2 (ja) |
| EP (2) | EP3715862B1 (ja) |
| JP (1) | JP6317450B2 (ja) |
| DE (1) | DE102013217478A1 (ja) |
| WO (1) | WO2015032613A2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013217478A1 (de) | 2013-09-03 | 2015-03-05 | Bert Grundmann | Beschleunigungssensor, Anordnung und Verfahren zum Detektieren eines Haftungsverlusts eines Fahrzeugrades |
| JP6606115B2 (ja) * | 2017-03-14 | 2019-11-13 | 日信工業株式会社 | バーハンドル車両用ブレーキ液圧制御装置 |
| DE102017205312A1 (de) * | 2017-03-29 | 2018-10-04 | Siemens Aktiengesellschaft | Messanordnung und Verfahren zum Erzeugen eines Ausgangsmesssignals mit zumindest einem Beschleunigungssensor |
| CN112964353B (zh) * | 2021-04-21 | 2021-10-12 | 中国地震局工程力学研究所 | 一种双磁路传感器 |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE821562C (de) * | 1949-06-19 | 1951-11-19 | Ludwig Schart | Geraet, besonders fuer Kraftwagen, zur UEberwachung der beim Befahren von Kurven auftretenden Fliehkraft |
| US3668629A (en) * | 1969-02-25 | 1972-06-06 | Walter S Pawl | Vehicle anti-skid and anti-spin signal and control device |
| US3715003A (en) * | 1970-10-15 | 1973-02-06 | A Jubenville | Trailer antifishtail control system |
| US3744850A (en) * | 1971-03-08 | 1973-07-10 | D Barthlome | Automatic traction control system |
| JPS48108338U (ja) | 1972-03-21 | 1973-12-14 | ||
| US3846748A (en) * | 1973-03-23 | 1974-11-05 | C Hopwood | Signaling system and sensor |
| US3946173A (en) | 1975-01-06 | 1976-03-23 | Haber Terry M | Acceleration/deceleration actuating mechanism for wrist instruments |
| DE2644606A1 (de) | 1976-10-02 | 1978-04-06 | Daimler Benz Ag | Magnetisch betaetigter elektrischer schalter |
| DE3206694A1 (de) * | 1982-02-25 | 1983-09-01 | Vdo Adolf Schindling Ag, 6000 Frankfurt | Einrichtung zur ueberwachung des schlupfes an raedern von kraftfahrzeugen |
| AU554344B2 (en) * | 1982-06-09 | 1986-08-14 | Jeco Co. Ltd. | Magnetically damped angle change detector |
| DE3506758A1 (de) * | 1985-02-26 | 1986-08-28 | Gerhard Dipl.-Phys. 8702 Himmelstadt Karl | Beschleunigungsmesser |
| EP0317962A3 (de) * | 1987-11-27 | 1990-07-11 | BRITAX-KOLB GMBH & CO | Beschleunigungssensor für Sicherungssysteme von Kraftfahrzeugen |
| JP2649696B2 (ja) * | 1988-05-26 | 1997-09-03 | 曙ブレーキ工業株式会社 | 車両のトラクション制御方法 |
| US5009294A (en) * | 1990-01-19 | 1991-04-23 | General Motors Corporation | Vehicle traction control system |
| US5149925A (en) * | 1990-09-05 | 1992-09-22 | Automotive Systems Laboratory, Inc. | Quick-response accelerometer |
| CH681931A5 (ja) | 1991-05-29 | 1993-06-15 | Ascom Zelcom Ag | |
| JPH0610871U (ja) | 1992-07-10 | 1994-02-10 | 日本電子機器株式会社 | 加速度センサ |
| US5586028A (en) * | 1993-12-07 | 1996-12-17 | Honda Giken Kogyo Kabushiki Kaisha | Road surface condition-detecting system and anti-lock brake system employing same |
| DE19527805C2 (de) * | 1994-07-29 | 2000-11-23 | Toyota Motor Co Ltd | Brems-Steuervorrichtung, die in der Lage ist, eine Traktions-Kontrolle eines Fahrzeug-Antriebsrades durchzuführen und die eine Einrichtung zur Reduzierung des Zufuhrdruckes der Pumpe während der Traktions-Kontrolle aufweist |
| DE29601148U1 (de) * | 1995-01-24 | 1996-04-04 | Hagmeier Georg | Warnblinkanordnung |
| JPH09280941A (ja) | 1996-02-15 | 1997-10-31 | Tadatoshi Goto | 振動検知装置 |
| JPH10160460A (ja) | 1996-10-04 | 1998-06-19 | Tadatoshi Goto | 傾斜検出装置 |
| DE19813941A1 (de) | 1998-03-28 | 1999-10-07 | Benecke Wolfgang | Mikromechanischer Beschleunigungssensor |
| DE19930779B4 (de) | 1999-07-03 | 2010-05-06 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| JP2001155601A (ja) * | 1999-11-29 | 2001-06-08 | Tokin Ceramics Corp | 傾斜角度検出センサ |
| TW486438B (en) | 2000-03-09 | 2002-05-11 | Sumitomo Rubber Ind | Device and method for determining coefficient of road surface friction |
| DE10223214A1 (de) | 2002-05-24 | 2003-12-18 | Siemens Ag | Verfahren zum Zuordnen von Reifenmodulen zu Radpositionen eines Reifendrucküberwachungssytems für ein Kraftfahrzeug und Vorrichtung zum Überwachen des Reifendrucks |
| EP1481861B1 (en) * | 2003-05-28 | 2007-07-04 | Ford Global Technologies, LLC | A method and a computer readable storage device for estimating tirc-to-road friction |
| FR2857576B1 (fr) | 2003-07-16 | 2005-10-14 | Depuy France | Dispositif d'aide pour l'implantation de protheses totales du genou |
| WO2005069993A2 (en) | 2004-01-20 | 2005-08-04 | Schrader Bridgeport International, Inc. | Determination of wheel sensor position using shock sensors and a wireless solution |
| US7356401B2 (en) * | 2004-08-13 | 2008-04-08 | Arvinmeritor Technology, Llc | Drivetrain protection and management system |
| JP2006072588A (ja) | 2004-09-01 | 2006-03-16 | Ts Photon:Kk | タイヤ内外の環境監視システム |
| DE102004051654A1 (de) * | 2004-10-22 | 2006-04-27 | "Stiftung Caesar" (Center Of Advanced European Studies And Research) | Beschleunigungssensoren im Reifen |
| JP2006142993A (ja) | 2004-11-19 | 2006-06-08 | Yokohama Rubber Co Ltd:The | 加速度センサ装着タイヤ |
| US8442735B2 (en) * | 2005-06-15 | 2013-05-14 | Ford Global Technologies, Llc | Traction control system and method |
| DE102007014765A1 (de) | 2007-03-28 | 2008-10-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Überwachung von Betriebsparametern an Reifen |
| DE102007052749A1 (de) | 2007-11-06 | 2009-05-07 | Robert Bosch Gmbh | Verfahren zum Detektieren von Radschlupf |
| DE102009021567A1 (de) | 2008-05-15 | 2009-12-31 | Continental Teves Ag & Co. Ohg | Mikromechanischer Beschleunigungssensor |
| DE102009045305B4 (de) | 2009-10-02 | 2021-01-14 | Robert Bosch Gmbh | Verfahren zur Ermittlung einer Drehrichtung eines rotierenden Körpers und Radsensormodul |
| GB2478790B (en) | 2010-03-19 | 2016-06-15 | Univ Southampton | Apparatus and method of vibration control |
| US9404937B2 (en) * | 2011-06-21 | 2016-08-02 | Siemens S.A.S. | Pendular accelerometer for detecting threshold oscillation values |
| EP2581258A1 (de) * | 2011-10-13 | 2013-04-17 | Siemens Aktiengesellschaft | Kraftwagen mit wenigstens einem elektrischen Antriebsmotor und Verfahren zum Betreiben einer Steuereinrichtung eines Kraftwagens |
| DE102013217478A1 (de) | 2013-09-03 | 2015-03-05 | Bert Grundmann | Beschleunigungssensor, Anordnung und Verfahren zum Detektieren eines Haftungsverlusts eines Fahrzeugrades |
-
2013
- 2013-09-03 DE DE201310217478 patent/DE102013217478A1/de active Pending
-
2014
- 2014-08-18 JP JP2016539460A patent/JP6317450B2/ja active Active
- 2014-08-18 EP EP20152887.4A patent/EP3715862B1/de active Active
- 2014-08-18 EP EP14755636.9A patent/EP3042211B1/de active Active
- 2014-08-18 US US14/916,147 patent/US9989554B2/en active Active
- 2014-08-18 WO PCT/EP2014/067585 patent/WO2015032613A2/de active Application Filing
-
2018
- 2018-04-24 US US15/961,688 patent/US10882499B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015032613A2 (de) | 2015-03-12 |
| EP3042211A2 (de) | 2016-07-13 |
| EP3715862B1 (de) | 2023-04-26 |
| DE102013217478A1 (de) | 2015-03-05 |
| EP3715862A1 (de) | 2020-09-30 |
| JP2016532120A (ja) | 2016-10-13 |
| US10882499B2 (en) | 2021-01-05 |
| WO2015032613A3 (de) | 2015-04-30 |
| US20180246140A1 (en) | 2018-08-30 |
| US20160195568A1 (en) | 2016-07-07 |
| US9989554B2 (en) | 2018-06-05 |
| EP3042211B1 (de) | 2020-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10882499B2 (en) | Acceleration sensor, especially duplex acceleration sensor, arrangement and method for detecting a loss of adhesion of a vehicle tire | |
| JP6244027B2 (ja) | タイヤの分類 | |
| CN108791298B (zh) | 用于计算道路摩擦估计值的方法和系统 | |
| US6711935B2 (en) | Method and apparatus for continuous monitoring of road surface friction | |
| KR101551972B1 (ko) | Esc 시스템을 이용한 브레이크 마찰재 마모 경고 시스템 | |
| CN101932458B (zh) | 用于确定车辆轮胎花纹深度的方法 | |
| US20160159187A1 (en) | System and methods for preventing wheel hop during a burnout event in a motor vehicle | |
| US20160247329A1 (en) | Tire Rotation Warning | |
| KR101623258B1 (ko) | 롤 안정화 시스템의 토크를 제어하는 방법 | |
| KR20020079973A (ko) | 차량의 하중 상태 평가를 위한 시스템 및 방법 | |
| TW201630764A (zh) | 用於測定二輪車的傾斜角度的方法 | |
| CN106626991B (zh) | 一种车辆轮胎磨损检测设备和方法及车辆控制系统 | |
| KR101316862B1 (ko) | 차량의 토크 벡터링 시스템 및 그것의 제어방법 | |
| JP2005518300A (ja) | 車両運転状態の検出方法および装置 | |
| KR101417770B1 (ko) | 차량의 기울기 검출 방법 및 장치 | |
| EP0815429B1 (en) | Method and apparatus for continuous monitoring of road surface friction | |
| JP2016532120A5 (ja) | ||
| JP2014091353A (ja) | パーキングブレーキ制御装置 | |
| US11247666B2 (en) | Method and device for damping a lateral pendular motion of a single-track motor vehicle | |
| JP5251278B2 (ja) | タイヤの摩耗状態推定方法及びその装置 | |
| JP2008302848A (ja) | タイヤ状態推定装置、自動車及びタイヤ状態推定方法 | |
| SE1450603A1 (sv) | Förfarande och system för säkert framförande av ett fordon vid kurvkörning | |
| JP2017515715A (ja) | 車両制御システム | |
| ITBO20080510A1 (it) | Metodo e dispositivo di controllo di un veicolo per segnalare il raggiungimento della temperatura ottimale di funzionamento dei pneumatici e dei freni | |
| EP1979178A1 (en) | Visual information apparatus for real-time demonstration of braking behaviour of motorcycles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170502 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170502 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180329 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6317450 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |