JP6308951B2 - 自動化軌道表面に埋め込まれたコード配列 - Google Patents
自動化軌道表面に埋め込まれたコード配列 Download PDFInfo
- Publication number
- JP6308951B2 JP6308951B2 JP2014555757A JP2014555757A JP6308951B2 JP 6308951 B2 JP6308951 B2 JP 6308951B2 JP 2014555757 A JP2014555757 A JP 2014555757A JP 2014555757 A JP2014555757 A JP 2014555757A JP 6308951 B2 JP6308951 B2 JP 6308951B2
- Authority
- JP
- Japan
- Prior art keywords
- carrier
- sample
- marks
- track
- trajectory
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 claims description 58
- 238000012545 processing Methods 0.000 claims description 46
- 239000000969 carrier Substances 0.000 claims description 38
- 238000004891 communication Methods 0.000 claims description 34
- 239000007788 liquid Substances 0.000 claims description 21
- 239000000523 sample Substances 0.000 description 218
- 238000012360 testing method Methods 0.000 description 81
- 230000032258 transport Effects 0.000 description 77
- 239000011295 pitch Substances 0.000 description 70
- 238000004458 analytical method Methods 0.000 description 38
- 238000000034 method Methods 0.000 description 31
- 239000003153 chemical reaction reagent Substances 0.000 description 22
- 230000001133 acceleration Effects 0.000 description 21
- 230000006870 function Effects 0.000 description 18
- 238000003018 immunoassay Methods 0.000 description 17
- 238000000338 in vitro Methods 0.000 description 16
- 230000008569 process Effects 0.000 description 14
- 238000006243 chemical reaction Methods 0.000 description 13
- 230000008901 benefit Effects 0.000 description 11
- 230000036461 convulsion Effects 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 11
- 239000013610 patient sample Substances 0.000 description 11
- 238000007726 management method Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 238000003745 diagnosis Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 8
- 239000000126 substance Substances 0.000 description 8
- 239000012530 fluid Substances 0.000 description 7
- 239000000872 buffer Substances 0.000 description 6
- 238000007689 inspection Methods 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 6
- 238000003860 storage Methods 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 239000003792 electrolyte Substances 0.000 description 4
- 238000002955 isolation Methods 0.000 description 4
- 239000003550 marker Substances 0.000 description 4
- 230000001360 synchronised effect Effects 0.000 description 4
- 108091026890 Coding region Proteins 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 206010000269 abscess Diseases 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 238000007705 chemical test Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000000994 depressogenic effect Effects 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000007723 transport mechanism Effects 0.000 description 2
- 210000002700 urine Anatomy 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 208000019838 Blood disease Diseases 0.000 description 1
- 101000606504 Drosophila melanogaster Tyrosine-protein kinase-like otk Proteins 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000009056 active transport Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 210000004381 amniotic fluid Anatomy 0.000 description 1
- 238000012863 analytical testing Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 239000011449 brick Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000010790 dilution Methods 0.000 description 1
- 239000012895 dilution Substances 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000005534 hematocrit Methods 0.000 description 1
- 208000014951 hematologic disease Diseases 0.000 description 1
- 208000018706 hematopoietic system disease Diseases 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000011534 incubation Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 210000003734 kidney Anatomy 0.000 description 1
- 230000003907 kidney function Effects 0.000 description 1
- 230000003908 liver function Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002503 metabolic effect Effects 0.000 description 1
- 230000004060 metabolic process Effects 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 238000010422 painting Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000012723 sample buffer Substances 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images






















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
- G01N35/00732—Identification of carriers, materials or components in automatic analysers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
- G01N35/00732—Identification of carriers, materials or components in automatic analysers
- G01N2035/00742—Type of codes
- G01N2035/00772—Type of codes mechanical or optical code other than bar code
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
- G01N35/00732—Identification of carriers, materials or components in automatic analysers
- G01N2035/00792—Type of components bearing the codes, other than sample carriers
- G01N2035/00801—Holders for sample carriers, e.g. trays, caroussel, racks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/00584—Control arrangements for automatic analysers
- G01N35/00722—Communications; Identification
- G01N35/00732—Identification of carriers, materials or components in automatic analysers
- G01N2035/00821—Identification of carriers, materials or components in automatic analysers nature of coded information
- G01N2035/00851—Identification of carriers, materials or components in automatic analysers nature of coded information process control parameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/02—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor using a plurality of sample containers moved by a conveyor system past one or more treatment or analysis stations
- G01N35/04—Details of the conveyor system
- G01N2035/0401—Sample carriers, cuvettes or reaction vessels
- G01N2035/0406—Individual bottles or tubes
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
Description
臨床化学分析装置、自動式免疫測定分析装置、又はその他の種類の体外診断(IVD)試験分析装置を含む自動式臨床分析装置(単に分析装置)。一般的に、分析装置は、複数の患者試料について、一連の自動式IVD試験を実施する。患者試料が分析装置へ(手動又は自動化システムを介して)投入されると、該分析装置は、各試料に対し、1以上の免疫測定、化学試験、又はその他の観察試験を実施することができる。用語の分析装置は、限定の意図は無いが、モジュール式分析システムとして構成される分析装置のことも指し得る。モジュール式分析システムは、自動化軌道などの自動化面によって線状又はその他の配置構成で相互接続された複数のモジュール(同じ種類のモジュール又は異なる種類のモジュールを含み得る)を組み合わせてなる統合され且つ拡張可能なシステムを含む。所定の実施形態において、自動化軌道は、患者試料及びその他の種類の物質をモジュール間で移動させるべく自立搬送体を使用する、統合搬送システムとして構成される。通常、モジュール式分析システムのうちの少なくとも1つのモジュールは、分析モジュールである。モジュールは、患者試料に対する分析タスクの高スループットを得るために特化し又は冗長に設けることもできる。
分析モジュールは、患者試料に対する免疫測定、化学試験、又はその他の観察試験などのIVD試験を実施するように構成される、モジュール式分析装置の中のモジュールである。通常、分析モジュールは、試料容器から液体試料を取り出し、反応キュベット又はチューブ(総じて反応容器とする)内で試薬に試料を混ぜ合わせる。分析モジュールで可能な試験には、限定の意図は無いが、電解質、腎機能や肝機能、代謝、心臓、ミネラル、血液疾患、薬物、免疫測定、又はその他の試験のサブセットも含まれる。所定のシステムにおいて、分析モジュールは、高スループットを得るために特化し又は冗長に設けることができる。分析モジュールの機能は、モジュール式の仕様を利用していない独立した分析装置によって実施することもできる。
搬送体は、試料容器(及びその延長線上で液体試料)又はその他のアイテムを自動化システムにおいて移動させるために使用可能な搬送ユニットである。所定の実施形態において、搬送体は、従来の自動化パック(例えば、管又はアイテムを嵌めるホルダ、自動化軌道のコンベヤベルトから移動力を受けるための摩擦面、及び、当パックを目的地へ導くことの可能な自動化軌道の壁又はレールによって当パックが案内されるようにする複数の側部、を備えた受動装置)のようにシンプルであり得る。所定の実施形態において、搬送体は、処理装置、移動システム、道案内システム、センサなどの能動部品を含む。所定の実施形態において、搬送体は、自動化システムのポイント間における搬送体の自己道案内を可能とする内蔵知能を含む。所定の実施形態において、搬送体は、移動力を提供する内蔵部品を含むが、他の形態においては、移動力は軌道などの自動化面から提供される。所定の実施形態において、搬送体は、決定ポイント間において一方向(例えば前進と後進)に移動を制限する自動化軌道に沿って移動する。搬送体は、試料管を受け入れて搬送する管ホルダを有するなど、IVD環境の予め決められた積荷に特化されるか、あるいは、自動化システムにおいて異なるアイテムを搬送するために最適化された搭載面を含み得る。搬送体は、1以上のスロット(例えば、搬送体が1つの又は複数の試料容器を保持できるように)を含む構成とすることもできる。
中央制御装置又は中央処理装置(中央運行計画装置(スケジューラ)とも呼ぶ)は、自動化システムの一部をなすプロセッサであり、搬送体内蔵の処理装置とは別である。中央制御装置は、搬送体に関する道順、運行予定、及びタスクの管理を容易にする。所定の実施形態において、中央制御装置は、自動化システムのサブシステムと通信し、搬送体と無線で通信する。中央制御装置は、走行軌跡(道案内)の情報(指令)を搬送体へ送り、搬送体が何処へ何時向かうべきか決めることも行う。所定の実施形態においては、局所処理装置が、局所待ち列を管理するなど、局所軌道区域における搬送体管理を担う。このような局所処置装置は、局所における中央制御装置相当装置として機能する。
決定ポイントは、各種類の搬送体に対してそれぞれの道案内(走行軌跡)の判断が行われる自動化軌道上のポイントである。共通の例において軌道は分岐路を含む。ある搬送体は方向転換すること無く進み、別の搬送体は速度を落として方向転換し得る。決定ポイントは、ある搬送体は止まる一方で他の搬送体は進む、設備における停止ポイントを含み得る。所定の実施形態において、これから方向転換する搬送体は横向きの力を制限するために減速する一方、この他の、方向転換しないか又は減速不要の移動プロファイルをもつ搬送体は進むことのできる、方向転換に先立つ減速ゾーンが、決定ポイントとして機能し得る。決定ポイントでなされる判断は、実施形態に係る、搬送体内蔵の処理装置、軌道区域の局所処理装置、中央処理装置、又はこれらの組み合わせによって実行される。
所定の実施形態において、搬送体は、自立制御搬送体としての特徴を有する。自立制御搬送体は、走行軌跡を自立制御する搬送体である。所定の実施形態において、自立搬送体は、サイズ、ウエイト、形態因子、及び中身の少なくともいずれかで異なる積荷もしくは積荷の組み合わせを搬送する搬送体が同時に同じ軌道上で運行できるようにする。各自立制御搬送体の走行軌跡は、自動化システムを移動中の搬送体に関する加加速度の限度、加速度、方向、及び速度の少なくともいずれかを含めた移動プロファイルによって制限される。この移動プロファイルは、各搬送体ごとに個別に走行軌跡を制限又は規定可能である。所定の実施形態において、移動プロファイルは、少なくとも、自動化システムの異なる区域ごとに(例えば、方向転換中に横方向の力が加わる原因となるカーブに対する直線軌道区域)、異なる搬送体状態ごとに(例えば、空の搬送体は、試料搬送中の搬送体や試薬又は他のアイテムを搬送中の搬送体とは異なる移動プロファイルをもつ)、あるいは異種の搬送体ごとに、違い得る。所定の実施形態において、搬送体は、個別の搬送体ごとに意図された移動プロファイル又は走行軌跡又は目的地情報に応じ、個々の搬送体が自立して運行可能なように、内蔵推進力部品を含む。
所定の実施形態において、搬送体は、高知能搬送体としての特徴をもつ。高知能搬送体は、移動、運行経路、又は走行軌跡の決定に関与する内蔵回路を有する搬送体である。高知能搬送体は、ソフトウエア指令を実行して該指令に応じ自動化面に沿って進むデジタルプロセッサ、又は、移動入力に応答する内蔵アナログ回路(例えばライン追跡回路)、を含み得る。指令は、移動プロファイル、交通又は走行軌跡のルールを特徴付ける指令を含む。搬送体の運行経路又は搬送体周囲状況に応じた決定を行う内蔵処理装置を支援する内蔵センサを含んだ高知能搬送体も可能である。内蔵処理装置の制御に従い搬送体を移動させるモータ又は磁石などの内蔵部品を含んだ高知能搬送体もあり得る。
体外診断(IVD)は、病気、体調、感染症、代謝マーカーを検出したり、あるいは、身体物質/体液の各種成分を数値化することの可能な試験である。このような試験は、患者の身体の外で、研究所、病院、内科医院、又はその他の健康を専門に扱う舞台において実施される。IVD試験は、概して、試験管又はその他の試料容器における、より広く言えば、生体外の管理された環境における検査から診断を実施することを目的とした医療機器を使用する。IVDは、患者体液試料に実施した検査に基づく病気の試験及び診断又は身体物質/体液の各種成分数値化を含む。IVDは、患者の体液又は膿瘍から得られた液体試料の分析により実施可能とされる患者診断及び治療に関係する各種の分析的試験及び検査を含む。このような検査は、一般的には、患者試料を入れたチューブやバイアルをセットした分析装置で進められる。IVDは、ここに説明するIVD官能性のサブセットにも当てはまる。
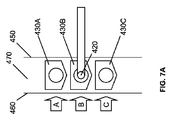
搬送体が内蔵センサを含んでいる実施形態において、軌道面の光学式やその他のマークあるいは軌道面から可視の又は感知可能な場所のマークが目印として機能する。目印は、現在位置、間近の停止位置、決定ポイント、方向転換、加速/減速ポイントなどの地理的情報を搬送体へ伝える。
研究所自動化システムは、自動的に(例えば、オペレータ又はソフトウエアの要求で)試料容器又はその他のアイテムを研究所環境内で行き来させることの可能なシステムを含む。分析装置に対して、自動化システムは、容器又はその他のアイテムを、分析装置のステーションへ、ステーションから、ステーションの中で、ステーションの間で、自動的に移動させる。このステーションは、限定の意図は無いが、モジュール式試験ステーション(例えば、ある種の検査に特化したユニットや、より大規模の分析装置に対して試験役務を提供するユニット)、試料ハンドリングステーション、貯蔵ステーション、又は作業セルを含む。
モジュールは、モジュール式分析システムの中で特定のタスク又は機能を実行する。モジュールの例として、分析試験用の試料を準備する分析前モジュール(例えば、試料試験管頭部のキャップ(蓋)を外すデキャッパー(蓋開け)モジュール)、試料の一部を抜き出して試験又は検査を実施する分析モジュール、分析試験後の貯蔵用試料を準備する分析後モジュール(例えば、試料試験管を再封止するリキャッパー(蓋閉じ)モジュール)、試料ハンドリングモジュールが含まれる。試料ハンドリングモジュールの機能には、在庫管理を目的として試料容器を管理し、分類し、自動化軌道(統合搬送システムも含まれる)へ又は該自動化軌道から試料容器を移動させ、別の研究所自動化軌道へ又は該自動化軌道から試料容器を移動させ、そして、トレイ、ラック、搬送体、パック、及び貯蔵場所の少なくともいずれかへ又はいずれかから試料容器を移動させることが含まれる。
例示する搬送体は患者試料を搬送するものとして説明するが、その他の妥当な積荷を自動化システムを通して搬送するために搬送体を使用する実施形態も可能である。積荷としては、液体、液体容器、試薬、廃棄物、使い捨てアイテム、部品、あるいはその他の適当な積荷が含まれる。
処理装置は、1以上のプロセッサか、又は関連ソフトウエア及び処理回路、あるいはこれら両方を表す。このような処理装置には、好適には各実施形態において詳述する処理機能を実行する、シングルコア又はマルチコアプロセッサ、シングル又はマルチプロセッサ、組み込みシステム、又は分散処理アーキテクチャが含まれる。
これらの用語は、軌道システムの主要部から外れる軌道区域を表すために使用される。引き出し路又はサイドカーは、主交通パターンから所定の搬送体を分岐させるための、弦、併走軌道、又はその他の適切な手段を含む。引き出し路又はサイドカーは、主軌道区域の交通を混乱させることなく、物理的行列を容易にしたり、所定の搬送体を停止又は減速させたりできるように構成される。
試料は、患者(人又は動物)から取得した液体又はその他の試料を指し、血液、尿、ヘマトクリット、羊膜液、又は検査や試験を実施するのに適したその他の液体を含め得る。試料は、患者試料の処理に際して分析装置を支援するために使用される較正液又はその他の液体を示す場合もある。
分析装置において非STAT試料に先行して取り扱われるべき試料にSTAT優先権を与えるため、研究所情報システム(LIS)又はオペレータにより割り当てられた優先順位をもつ試料。上手く利用することで、所定の試料を他の試料に先駆けて試験過程に通すことができ、内科医やその他の専門家が迅速に試験結果を受け取ることができる。
ステーションは、モジュール内の特定のタスクを実施する一部分を含む。例えば、分析モジュールに提供されるピペットステーションは、統合搬送システム又は研究所自動化システムで搬送体により搬送される試料容器から試料液をピペットで移すために使用される。モジュールのそれぞれが、モジュールに機能性を追加する1以上のステーションを含み得る。
ステーションは、分析装置内の特定のタスクを実施する一部分を含む。例えば、キャッパー(蓋閉じ)/デキャッパー(蓋開け)ステーションは試料容器に対しキャップを開け閉めし、試験ステーションは試料の一部を抜き取って試験又は検査を実施し、試料ハンドリングステーションは、試料容器を管理し、自動化軌道へ又は自動化軌道からの試料容器の移動を管理し、貯蔵場所やトレイへ又は貯蔵場所やトレイからの試料容器の移動を管理する。ステーションはモジュール化可能で、より大規模な分析装置へステーションを追加することができる。各モジュールは、1以上のモジュールからなる分析装置に機能性を追加する1以上のステーションを含み得る。所定の実施形態において、モジュールは、複数のモジュール又はステーション(あるいはモジュール及びステーション)を接続する自動化システムの一部を含むか、あるいは、該システムとは別である。ステーションは、特定のタスクを実行する1以上の機器を含む(例えば、ピペットは、免疫測定ステーションにおいて使用され、自動化軌道上の試料に対し作用する機器である)。別途言及する場合を除いて、モジュールとステーションの概念は相互に代替可能なものとして参照される。
試料は、搬送体表面を汚染すること無く試料を搬送体で搬送できるように、試験管又はその他の適切な容器に入れて搬送される。
Claims (15)
- 自動式臨床分析装置に使用する自動化システムであって、
光学コード化マークの第1セットを含む第1軌道区域及び光学コード化マークの第2セットを含む第2軌道区域を少なくとも有する軌道と、
前記光学コード化マークの第1及び第2セットを観測するように構成された複数の自立移動搬送体と、
を備え、
前記光学コード化マークの第1セットが第1ピッチを有し、前記光学コード化マークの第2セットがより狭い第2ピッチを有しており、
前記複数の自立移動搬送体が、それぞれ
観測した前記光学コード化マークの第1および第2セットに基づいて、前記軌道上の自機位置及び速度を判断するとともに経路を選定する処理装置と、
前記複数の自立移動搬送体の間で、前記位置、速度及び経路の情報を送受信するための通信システムと、を有する、
自動化システム。 - 前記経路の選定時に、前記第1ピッチの長さが前記自立移動搬送体の少なくとも1つへ無線で伝達される、請求項1に記載の自動化システム。
- 前記第1ピッチの長さが前記光学コード化マークの第1セット中に記号でコード化されている、請求項1に記載の自動化システム。
- 同期情報が前記光学コード化マークの第1セット中に記号でコード化されている、請求項1に記載の自動化システム。
- 少なくとも前記第1軌道区域の位置情報が前記光学コード化マークの第1セットにコード化されている、請求項1に記載の自動化システム。
- 前記自立移動搬送体は、前記光学コード化マークの第1セット中のマークを計数して前記第1軌道区域において相対位置を判断する、請求項1に記載の自動化システム。
- 前記第1軌道区域に1以上の光学目印が設けられている、請求項1に記載の自動化システム。
- 自動式臨床分析装置に使用される自動化システムであって、
少なくとも光学コード化マークの第1セットを含み、該第1セットの少なくともサブセットが第1ピッチで定間隔に配置されている軌道区域を少なくとも1つ有する軌道と、
前記光学コード化マークの数を計数して前記軌道区域内の自分の現在位置及び速度を判断すること及び経路を選定することを含めて、少なくとも前記光学コード化マークの第1セットを利用して前記軌道を進む液体試料を搬送する複数の移動搬送体と、
を備え、
前記複数の移動搬送体が、それぞれ
計数した前記光学コード化マークの数に基づいて、前記軌道上の自機位置及び速度を判断するとともに経路を選定する処理装置と、
前記複数の移動搬送体の間で、前記位置、速度及び経路の情報を送受信するための通信システムと、を有する、
自動化システム。 - 前記経路の選定時に、前記第1ピッチの長さが少なくとも1つの前記移動搬送体へ無線で伝達される、請求項8に記載の自動化システム。
- 前記第1ピッチの長さが前記光学コード化マークの第1セット中に記号でコード化されている、請求項8に記載の自動化システム。
- 同期情報が前記光学コード化マークの第1セット中の記号にコード化されている、請求項8に記載の自動化システム。
- 少なくとも前記軌道区域の位置情報が前記光学コード化マークの第1セットにコード化されている、請求項8に記載の自動化システム。
- 前記軌道区域が1以上の光学目印を含む、請求項8に記載の自動化システム。
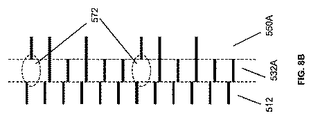
- 前記光学コード化マークの第1セットに複数のマーク列が含まれている、請求項8に記載の自動化システム。
- 前記マークの列が互いに非対称にずらされており、前記光学コード化マークの第1セットを観測することにより、前記移動搬送体の現在進んでいる方向が示される、請求項14に記載の自動化システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261594486P | 2012-02-03 | 2012-02-03 | |
| US61/594,486 | 2012-02-03 | ||
| PCT/US2013/024353 WO2013116654A1 (en) | 2012-02-03 | 2013-02-01 | Encoding scheme embedded into an automation track surface |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015513073A JP2015513073A (ja) | 2015-04-30 |
| JP2015513073A5 JP2015513073A5 (ja) | 2016-04-28 |
| JP6308951B2 true JP6308951B2 (ja) | 2018-04-11 |
Family
ID=48905875
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014555757A Active JP6308951B2 (ja) | 2012-02-03 | 2013-02-01 | 自動化軌道表面に埋め込まれたコード配列 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9726686B2 (ja) |
| EP (1) | EP2810278A4 (ja) |
| JP (1) | JP6308951B2 (ja) |
| WO (1) | WO2013116654A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9625481B2 (en) * | 2012-05-24 | 2017-04-18 | Siemens Healthcare Diagnostics Inc. | Non-contact optical encoding scheme for intelligent automation puck |
| EP3096144A1 (en) * | 2015-05-22 | 2016-11-23 | Roche Diagniostics GmbH | Method of operating a laboratory automation system and laboratory automation system |
| EP3314224A4 (en) | 2015-06-26 | 2019-05-15 | Abbott Laboratories | MOVABLE REACTION VESSEL FOR MOVING REACTION VESSES FROM A PROCESSING RAIL TO A ROTATING DEVICE IN A DIAGNOSTIC ANALYZER |
| JP7002529B2 (ja) | 2016-07-21 | 2022-02-10 | シーメンス・ヘルスケア・ダイアグノスティックス・インコーポレーテッド | 自動臨床分析器システム及び方法 |
| WO2018017759A1 (en) | 2016-07-21 | 2018-01-25 | Siemens Healthcare Diagnostics Inc. | Temperature controlled transport puck |
| MX2019002780A (es) | 2016-09-09 | 2019-09-04 | Procter & Gamble | Sistema y método para llenar simultáneamente recipientes de formas y/o tamaños diferentes. |
| US10613523B2 (en) | 2016-09-09 | 2020-04-07 | The Procter & Gamble Company | Methods for simultaneously producing different products on a single production line |
| CN109661366B (zh) | 2016-09-09 | 2022-01-14 | 宝洁公司 | 用于独立地引导载具并且将容器和闭合件递送到单元操作站的系统和方法 |
| MX2019002777A (es) | 2016-09-09 | 2019-08-29 | Procter & Gamble | Sistema y método para producir productos en base a solicitud. |
| EP3510459A2 (en) | 2016-09-09 | 2019-07-17 | The Procter and Gamble Company | System and method for independently routing container-loaded vehicles to create different finished products |
| ES2821397T3 (es) | 2016-09-09 | 2021-04-26 | Procter & Gamble | Soporte de vacío con junta de falda extensible |
| CA3035965C (en) | 2016-09-09 | 2022-01-11 | The Procter & Gamble Company | System and method for simultaneously filling containers with different fluent compositions |
| EP3510548B1 (en) | 2016-09-09 | 2023-10-11 | The Procter & Gamble Company | Systems and methods for producing customized products intermixed with mass produced products |
| DE102017221213A1 (de) * | 2017-11-27 | 2019-05-29 | Apt Gmbh Automation Und Produktionstechnik | Transportgutträger, Transportsystem und Verfahren zum Transport eines Transportguts unter Verwendung einer Fahrsteuerung |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1552274A (ja) * | 1967-11-24 | 1969-01-03 | ||
| JPS59112312A (ja) * | 1982-12-20 | 1984-06-28 | Nippon Yusoki Co Ltd | 無人搬送車の誘導帯 |
| JPS6155705U (ja) | 1984-09-18 | 1986-04-15 | ||
| JPS6182937U (ja) | 1984-11-01 | 1986-06-02 | ||
| CH668655A5 (de) * | 1985-03-15 | 1989-01-13 | Jd Technologie Ag | Passivspur-einrichtung zur fuehrung und steuerung von fahrerlosen transport- und montageeinheiten. |
| JPH0612123A (ja) | 1992-06-24 | 1994-01-21 | Toyota Motor Corp | 無人搬送車の走行制御装置 |
| WO1996025712A1 (en) * | 1995-02-16 | 1996-08-22 | Smithkline Beecham Corporation | Apparatus and process |
| JP2895000B2 (ja) * | 1996-09-03 | 1999-05-24 | 山口日本電気株式会社 | 無人搬送車の誘導制御装置 |
| US6024204A (en) | 1997-11-14 | 2000-02-15 | Bayer Corporation | Conveyor system for clinical test apparatus |
| US6202829B1 (en) | 1997-11-14 | 2001-03-20 | Bayer Corporation | Conveyor system for clinical test apparatus |
| JPH11264828A (ja) | 1998-03-19 | 1999-09-28 | Hitachi Ltd | 検体搬送システム |
| US6429016B1 (en) * | 1999-10-01 | 2002-08-06 | Isis Pharmaceuticals, Inc. | System and method for sample positioning in a robotic system |
| JP2001174468A (ja) * | 1999-12-15 | 2001-06-29 | Petroleum Energy Center | 自動試験システム |
| JP2001188610A (ja) * | 1999-12-28 | 2001-07-10 | New Technol Kenkyusho:Kk | 視覚誘導方式による無人搬送台車の制御方法及びこれを利用した無人搬送台車システム |
| JP2001278409A (ja) | 2000-03-31 | 2001-10-10 | Nippon Shooter Ltd | 検体搬送車およびこれを用いた検体搬送システム |
| US6695668B2 (en) * | 2001-01-29 | 2004-02-24 | Kevin Gerard Donahue | Toy vehicle and method of controlling a toy vehicle from a printed track |
| JP3588067B2 (ja) | 2001-08-31 | 2004-11-10 | 照明 伊藤 | 検体搬送システム |
| US7487061B2 (en) * | 2002-05-23 | 2009-02-03 | Sysmex Corporation | Sample analyzer |
| US6999847B2 (en) * | 2002-07-26 | 2006-02-14 | Unelab Llc | Specimen carrier transfer apparatus for a conveyor track |
| JP4087302B2 (ja) * | 2003-07-10 | 2008-05-21 | 日本電子株式会社 | 検査装置 |
| JP4074999B2 (ja) * | 2004-01-13 | 2008-04-16 | 村田機械株式会社 | 搬送台車システム |
| JP3905094B2 (ja) * | 2004-04-07 | 2007-04-18 | 株式会社アイディエス | 自走式検体ホルダの搬送システム |
| JP4375565B2 (ja) * | 2005-07-12 | 2009-12-02 | 村田機械株式会社 | 走行台車システム |
| US7814733B2 (en) * | 2006-04-10 | 2010-10-19 | Ranpak Corp. | Packaging system with volume measurement |
| JP2008058202A (ja) * | 2006-08-31 | 2008-03-13 | Ids Co Ltd | 検体搬送システム |
| US7681466B2 (en) | 2007-05-01 | 2010-03-23 | Siemens Healthcare Diagnostics Inc. | Programmable random access sample handler for use within and automated laboratory system |
| US7954621B2 (en) | 2007-09-27 | 2011-06-07 | Rockwell Automation Technologies, Inc. | Modular wireless conveyor interconnection method and system |
| DE102010028769A1 (de) | 2010-05-07 | 2011-11-10 | Pvt Probenverteiltechnik Gmbh | System zum Transportieren von Behältern zwischen unterschiedlichen Stationen und Behälterträger |
| JP6109156B2 (ja) | 2011-05-13 | 2017-04-05 | ベックマン コールター, インコーポレイテッド | 研究室生成物輸送要素を含むシステムおよび方法 |
-
2013
- 2013-02-01 EP EP13743503.8A patent/EP2810278A4/en not_active Withdrawn
- 2013-02-01 US US14/376,111 patent/US9726686B2/en active Active
- 2013-02-01 JP JP2014555757A patent/JP6308951B2/ja active Active
- 2013-02-01 WO PCT/US2013/024353 patent/WO2013116654A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015513073A (ja) | 2015-04-30 |
| EP2810278A4 (en) | 2015-10-28 |
| US20150010437A1 (en) | 2015-01-08 |
| US9726686B2 (en) | 2017-08-08 |
| WO2013116654A1 (en) | 2013-08-08 |
| EP2810278A1 (en) | 2014-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6308951B2 (ja) | 自動化軌道表面に埋め込まれたコード配列 | |
| JP6113193B2 (ja) | バーコード読み取り式試験管ホルダ | |
| JP6190390B2 (ja) | 高知能双方向多機能搬送体と物質分配及び搬送用統合自動化システム | |
| JP6218753B2 (ja) | 状態表示機能付き試料搬送体 | |
| EP2856150B1 (en) | Authomatic analyser comprising self-propelled intelligent carriers | |
| CA2890131C (en) | Multiple carrier and sleeve tray | |
| CA2903012C (en) | Surface markings for an optically guided device | |
| US9671418B2 (en) | Multiple payload type carrier | |
| US9645159B2 (en) | Test menu expansion system and method | |
| JP2015518187A (ja) | 自動化システム搬送体機構用の動力源 | |
| JP6832417B2 (ja) | 温度制御式搬送パック |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151224 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160307 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161101 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170131 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170829 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180313 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6308951 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |