JP6308739B2 - 位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 - Google Patents
位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 Download PDFInfo
- Publication number
- JP6308739B2 JP6308739B2 JP2013177548A JP2013177548A JP6308739B2 JP 6308739 B2 JP6308739 B2 JP 6308739B2 JP 2013177548 A JP2013177548 A JP 2013177548A JP 2013177548 A JP2013177548 A JP 2013177548A JP 6308739 B2 JP6308739 B2 JP 6308739B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- signal
- pattern
- track
- processing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 title claims description 71
- 238000012545 processing Methods 0.000 claims description 49
- 238000012937 correction Methods 0.000 claims description 33
- 238000000034 method Methods 0.000 claims description 29
- 238000004364 calculation method Methods 0.000 claims description 19
- 230000003287 optical effect Effects 0.000 claims description 15
- 238000003491 array Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 7
- FFBHFFJDDLITSX-UHFFFAOYSA-N benzyl N-[2-hydroxy-4-(3-oxomorpholin-4-yl)phenyl]carbamate Chemical compound OC1=C(NC(=O)OCC2=CC=CC=C2)C=CC(=C1)N1CCOCC1=O FFBHFFJDDLITSX-UHFFFAOYSA-N 0.000 description 6
- 230000000694 effects Effects 0.000 description 4
- 238000000926 separation method Methods 0.000 description 4
- 238000005259 measurement Methods 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34776—Absolute encoders with analogue or digital scales
- G01D5/34792—Absolute encoders with analogue or digital scales with only digital scales or both digital and incremental scales
- G01D5/34794—Optical encoders using the Vernier principle, i.e. incorporating two or more tracks having a (n, n+1, ...) relationship
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34707—Scales; Discs, e.g. fixation, fabrication, compensation
- G01D5/34715—Scale reading or illumination devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/347—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells using displacement encoding scales
- G01D5/34746—Linear encoders
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00002—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for
- H04N1/00007—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for relating to particular apparatus or devices
- H04N1/00013—Reading apparatus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00002—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for
- H04N1/00007—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for relating to particular apparatus or devices
- H04N1/00015—Reproducing apparatus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00002—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for
- H04N1/00026—Methods therefor
- H04N1/00037—Detecting, i.e. determining the occurrence of a predetermined state
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00002—Diagnosis, testing or measuring; Detecting, analysing or monitoring not otherwise provided for
- H04N1/00026—Methods therefor
- H04N1/00045—Methods therefor using a reference pattern designed for the purpose, e.g. a test chart
Description
S1A = S1a − ηa12 × cos(α2+γa12) ・・・(1)
S1B = S1b − ηb12 × cos(α2+γb12) ・・・(2)
S1A、S1Bはそれぞれ補正後の第1トラックのA相、B相信号、ηa12、ηb12はそれぞれ第1トラックのA相、B相補正振幅、γa12、γb12はそれぞれ第1トラックのA相、B相補正位相である。ここで行う補正は、上述した空間フィルタの原理により分離しきれなかった第2トラックの信号を第1トラックのA相、B相信号から除去するための補正である。ηa12、ηb12、γa12、γb12はこの空間フィルタの分離特性から求められるパラメータであり、本実施例ではあらかじめ測定、及び、算出しておき、EEPROM102に記憶しておく。測定、算出方法は、複数の位置でS1a、S1b、S2a、S2bを測定し、フーリエ変換により周波数分離し、応答特性を算出することでηa12、ηb12、γa12、γb12を算出する。
S2A = S2a − ηa21 × cos(α1+γa21) ・・・(3)
S2B = S2b − ηb21 × cos(α1+γb21) ・・・(4)
S2A、S2Bはそれぞれ補正後の第2トラックのA相、B相信号、ηa21、ηb21はそれぞれ第2トラックのA相、B相補正振幅、γa21、γb21はそれぞれ第2トラックのA相、B相補正位相である。ここで行う補正は、上述した空間フィルタの原理により分離しきれなかった第1トラックの信号を第2トラックのA相、B相信号から除去するための補正である。
Xr = 100×C + 100×α1/2π ・・・(5)
Xt = Xr + 100×Co ・・・(6)
ここで求めた仮位置Xtは、S213で求めた時点での位置Xが存在する第1のトラックパターンの周期内の基準位置側端を参照位置(100×Co)として、そこからの相対移動量である相対位置Xrを加算した位置であるため、実際の位置Xに近い値となっている。ただし、まだ補正していない第1トラックのA相、B相信号S1a、S1bを使用して算出した値であるため、若干ずれてしまっている。
α2 = 2π×mod(Xt、201)/201 ・・・(7)
ここで、関数mod(x、y)はxをyで割った余りを示しており、仮位置Xtを第2トラックパターン間隔P2(201μm)で割った余りと、P2との比をとり、2πをかけることで位相α2を算出している。本実施例では、位置Xが0の位置を基準位置として、かつ、基準位置で位相α2が0になるように第2トラックパターンを設定しているため、位相α2は式(7)のように算出できる。ただし、位置Xが0の時、位相α2が0以外のΔαでも良く、その場合には以下の式(8)を用いて算出する。
α2_2 = mod(α2+Δα、2π) ・・・(8)
実施例2における位置検出処理2について説明する。図11は実施例2における位置検出処理2を示したフローチャートである。
ΔX = f(α1、α2) ・・・(9)
104 センサ(検出素子アレイ)
202 スケール
203a 第1のトラックパターン(第1の変調周期のパターン列)
203b 第2のトラックパターン(第2の変調周期のパターン列)
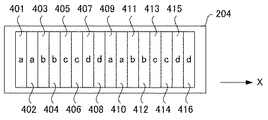
204 受光部(検出素子アレイ)
205 信号処理回路(信号生成手段)
401〜416 フォトダイオード(検出素子アレイ)
Claims (10)
- 第1周期で配列された第1パターンと、前記第1周期より長い第2周期で配列された第 2パターンとを有するスケールと、
前記スケールとは相対移動し、前記第1パターンおよび前記第2パターンに基づく検出 信号をそれぞれが出力する複数の検出素子を有する検出素子アレイと、
前記検出素子アレイから出力された検出信号に基づいて、前記第1パターンに基づく互いに位相の異なる複数の第1信号と、前記第2パターンに基づく互いに位相の異なる複数の第2信号とを生成する生成部と、
前記複数の第1信号および前記複数の第2信号に基づいて、前記スケールおよび前記検 出素子アレイのうち一方の他方に対する参照位置を得、該参照位置と前記複数の第1信号とに基づいて、前記一方の前記他方に対する位置を得る演算部と、
を有する位置検出装置であって、
前記演算部は、前記一方の前記他方に対する位置を前記参照位置と前記複数の第1信号 とに基づいて仮に得る第1処理と、前記第1処理により仮に得られた位置に基づいて、前 記複数の第2信号から得られる位相を推定し、推定された該位相により得られた補正量に 基づいて前記一方の前記他方に対する位置を得る第2処理とを行う、
ことを特徴とする位置検出装置。 - 前記演算部は、前記第2処理において、前記位相に基づいて前記複数の第2信号を推定 し、推定された該複数の第2信号により前記複数の第1信号をそれぞれ補正して得られた 複数の信号に基づいて前記一方の前記他方に対する位置を得ることを特徴とする請求項1に記載の位置検出装置。
- 前記演算部は、前記第2処理を繰り返して前記一方の前記他方に対する位置を得ることを特徴とする請求項1または2に記載の位置検出装置。
- 前記演算部は、前記第2処理において、推定された前記位相と、前記複数の第1信号に より得られた位相とに基づいて、前記補正量を得、得られた該補正量により、前記第1処 理により仮に得られた前記一方の前記他方に対する位置を補正することを特徴とする請求項1に記載の位置検出装置。
- 前記第1パターンおよび前記第2パターンは、それぞれ前記第1周期で配列された第1スリットパターンおよび前記第2周期で配列された第2スリットパターンであり、
前記検出素子アレイは、前記第1スリットパターンおよび前記第2スリットパターンで反射した光を受光する受光素子アレイである、
ことを特徴とする請求項1乃至4のいずれか1項に記載の位置検出装置。 - 前記演算部は、前記第1処理により仮に得られた前記一方の前記他方に対する位置を前 記第2周期で割って得られた余りに基づいて前記位相を推定することを特徴とする請求項 1に記載の位置検出装置。
- 請求項1乃至6のいずれか1項に記載の位置検出装置と、可動光学部材とを有し、前記位置検出装置により前記可動光学部材の位置を検出することを特徴とするレンズ装置。
- 請求項1乃至6のいずれか1項に記載の位置検出装置と、可動光学部材とを有し、前記 位置検出装置により前記可動光学部材の位置を検出することを特徴とする走査光学装置。
- 請求項8に記載の走査光学装置を含むことを特徴とする画像読取装置。
- 請求項8に記載の走査光学装置を含むことを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013177548A JP6308739B2 (ja) | 2013-08-29 | 2013-08-29 | 位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 |
| US14/471,724 US9121733B2 (en) | 2013-08-29 | 2014-08-28 | Position detecting apparatus, and lens apparatus, image reading apparatus, and image forming apparatus including the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013177548A JP6308739B2 (ja) | 2013-08-29 | 2013-08-29 | 位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015045594A JP2015045594A (ja) | 2015-03-12 |
| JP2015045594A5 JP2015045594A5 (ja) | 2016-09-29 |
| JP6308739B2 true JP6308739B2 (ja) | 2018-04-11 |
Family
ID=52582856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013177548A Active JP6308739B2 (ja) | 2013-08-29 | 2013-08-29 | 位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9121733B2 (ja) |
| JP (1) | JP6308739B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9772202B1 (en) * | 2016-07-01 | 2017-09-26 | Mitutoyo Corporation | Absolute position encoder combining signals of two widely separated wavelengths |
| JP2018036090A (ja) | 2016-08-30 | 2018-03-08 | キヤノンプレシジョン株式会社 | エンコーダおよびこれを備えた装置 |
| US10303270B2 (en) * | 2016-09-12 | 2019-05-28 | Microsoft Technology Licensing, Llc | Linear encoder force transducer |
| US10775203B2 (en) * | 2018-08-17 | 2020-09-15 | Aeolus Robotics Corporation Limited | Optical encoder and method of operating the same for converting image of a portion of a pattern of codes into waveforms |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8436293B2 (en) * | 2009-02-23 | 2013-05-07 | Christopher C. Chang | Optical encoder and method for measuring displacement information using multiple optical tracks of diffractive optical regions having different periodicities |
| US8309906B2 (en) * | 2010-06-10 | 2012-11-13 | Mitutoyo Corporation | Absolute optical encoder with long range intensity modulation on scale |
| JP2012117884A (ja) * | 2010-11-30 | 2012-06-21 | Fuji Electric Co Ltd | エンコーダ誤差補正装置 |
| JP5791340B2 (ja) * | 2011-04-14 | 2015-10-07 | キヤノン株式会社 | エンコーダ |
| JP5327302B2 (ja) * | 2011-10-12 | 2013-10-30 | 富士ゼロックス株式会社 | 反射型センサ及び画像形成装置 |
-
2013
- 2013-08-29 JP JP2013177548A patent/JP6308739B2/ja active Active
-
2014
- 2014-08-28 US US14/471,724 patent/US9121733B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US9121733B2 (en) | 2015-09-01 |
| US20150062661A1 (en) | 2015-03-05 |
| JP2015045594A (ja) | 2015-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5755010B2 (ja) | エンコーダ | |
| JP5791340B2 (ja) | エンコーダ | |
| TWI485368B (zh) | 位置檢測用光偵測器、使用該偵測器之位置檢測裝置及位置檢測方法 | |
| JP5755009B2 (ja) | エンコーダ | |
| US10540559B2 (en) | Position detection apparatus, lens apparatus, image pickup system, machine tool apparatus, position detection method, and non-transitory computer-readable storage medium which are capable of detecting abnormality | |
| JP6308739B2 (ja) | 位置検出装置及びそれを有するレンズ装置、画像読取装置及び画像形成装置 | |
| CN104457805A (zh) | 编码器和使用编码器的装置 | |
| JP6099908B2 (ja) | 2次元アブソリュートエンコーダおよびスケール | |
| US9574910B2 (en) | Position detecting apparatus, and lens apparatus and image pickup apparatus including the position detecting apparatus | |
| US20150130931A1 (en) | Position detecting apparatus, and lens apparatus and image pickup apparatus including the position detecting apparatus | |
| CN103234456B (zh) | 超高分辨率光栅尺 | |
| JP2015045594A5 (ja) | ||
| JP6756477B2 (ja) | エンコーダ | |
| JP6334892B2 (ja) | 位置検出装置及びそれを有するレンズ装置及び撮影装置 | |
| JP2015179051A5 (ja) | ||
| EP2587226A2 (en) | Displacement detecting device and method | |
| JP2004309366A (ja) | 位置検出装置 | |
| JP4779517B2 (ja) | 光学式絶対値エンコーダ | |
| JP5747342B2 (ja) | 光学式エンコーダ | |
| JP6440609B2 (ja) | 位置検出装置、レンズ装置、撮像システム、工作装置、露光装置、位置検出方法、プログラム、記憶媒体 | |
| JP6091268B2 (ja) | 位置検出装置、レンズ装置、撮像システム、工作装置、位置検出方法、および、プログラム | |
| JP2014224745A (ja) | 原点信号発生装置及び原点信号発生システム | |
| JP4265929B2 (ja) | 変位測定装置 | |
| JP2014219233A (ja) | 位置検出装置、レンズ装置、撮像システム、工作装置、および、位置検出方法 | |
| JP2016014612A (ja) | エンコーダ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160812 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160812 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170706 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170904 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20171214 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180126 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180313 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6308739 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |