JP6286733B2 - 交流電動機のデジタル式回転子位相速度推定装置 - Google Patents
交流電動機のデジタル式回転子位相速度推定装置 Download PDFInfo
- Publication number
- JP6286733B2 JP6286733B2 JP2013236286A JP2013236286A JP6286733B2 JP 6286733 B2 JP6286733 B2 JP 6286733B2 JP 2013236286 A JP2013236286 A JP 2013236286A JP 2013236286 A JP2013236286 A JP 2013236286A JP 6286733 B2 JP6286733 B2 JP 6286733B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- frequency voltage
- rotor
- frequency
- rotor phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000001514 detection method Methods 0.000 claims description 11
- 238000000034 method Methods 0.000 description 45
- 230000001360 synchronised effect Effects 0.000 description 30
- 230000014509 gene expression Effects 0.000 description 26
- 239000013598 vector Substances 0.000 description 23
- 230000000694 effects Effects 0.000 description 18
- 238000012545 processing Methods 0.000 description 14
- 239000011159 matrix material Substances 0.000 description 10
- 230000004044 response Effects 0.000 description 9
- 230000008569 process Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 238000000605 extraction Methods 0.000 description 6
- 230000006698 induction Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 230000004907 flux Effects 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









Description

また、印加した空間回転高周波電圧の周期Thは、制御周期Tsの3〜10倍とする。すなわち、
(15)式の空間回転高周波電圧指令値を採用する場合には、電圧指令値の直交性が活用でき、ひいては、(14)式の関係は、次式のように簡略化することができる。
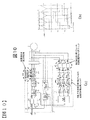
2 電力変換器
3 離散時間電流検出器
4a 3相2相変換器
4b 2相3相変換器
5a ベクトル回転器
5b ベクトル回転器
6 電流制御器
7 指令変換器
8 速度制御器
9 ローパスフィルタ
10 位相速度推定器
10−1 空間回転高周波電圧指令器
10−2 時間差分器
10−3 推定値生成器
10−4 位相同期器
11 係数器
12 余弦正弦信号発生器
Claims (4)
- 駆動基本周波数より高い周波数の高周波電圧の印加に対し回転子が突極特性を示す交流電動機のための、電力変換器と固定子電流検出器とを用いた周期Tsの固定子電流デジタル制御機能を備えたデジタル式駆動制御装置に使用されるデジタル式回転子位相速度推定装置であって、
Nhを3から10の整数とするとき、周期Th=Nh*Tsで空間的に回転する高周波電圧を、
固定子電流の離散時間検出時刻と同期した形で印加するようにした空間回転高周波電圧印加手段と、
該固定子電流検出器を用いて周期Tsで離散時間検出された、空間回転高周波電圧の印加に起因する高周波電流成分を含む固定子電流を、周期Tsごとに時間差分して、時間差分固定子電流を生成する時間差分固定子電流生成手段と、
該時間差分固定子電流の時間的に隣接した2個のみと該空間回転高周波電圧に起因する高周波信号の前記時間差分固定子電流に対応した時間的に隣接した2個のみとを用いて、回転子位相の推定値あるいは回転子位相と基本的に微積分関係にある回転子速度の推定値の少なくとも何れかの推定値を、周期Tsごとに生成する回転子位相速度推定値生成手段と、
を備えることを特徴とするデジタル式回転子位相速度推定装置。 - 回転子位相に位相偏差ゼロで同期を目指したγ軸とこれに直交したδ軸とで構成されるγδ準同期座標系上で、空間的に回転する高周波電圧を印加するようにして該空間回転高周波電圧印加手段を構成したことを特徴とする請求項1記載のデジタル式回転子位相速度推定装置。
- 回転子位相に位相偏差ゼロで同期を目指したγ軸とこれに直交したδ軸とで構成されるγδ準同期座標系上で、固定子電流を周期Tsごとに時間差分して、時間差分固定子電流を生成するようにして、該時間差分固定子電流生成手段を構成したことを特徴とする請求項1記載のデジタル式回転子位相速度推定装置。
- 位相同期ループまたは位相同期ループと等価なフィードバックループを構成するようにして、該回転子位相速度推定値生成手段を構成したことを特徴とする請求項1記載のデジタル式回転子位相速度推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236286A JP6286733B2 (ja) | 2013-10-28 | 2013-10-28 | 交流電動機のデジタル式回転子位相速度推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013236286A JP6286733B2 (ja) | 2013-10-28 | 2013-10-28 | 交流電動機のデジタル式回転子位相速度推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015089322A JP2015089322A (ja) | 2015-05-07 |
| JP6286733B2 true JP6286733B2 (ja) | 2018-03-07 |
Family
ID=53051562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013236286A Active JP6286733B2 (ja) | 2013-10-28 | 2013-10-28 | 交流電動機のデジタル式回転子位相速度推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6286733B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3879695A1 (en) * | 2020-03-11 | 2021-09-15 | Mitsubishi Electric R & D Centre Europe B.V. | Method and device for estimating the position of a rotor of a motor |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4120775B2 (ja) * | 2002-03-18 | 2008-07-16 | 有限会社シー・アンド・エス国際研究所 | 交流電動機のベクトル制御方法及び同装置 |
| JP4899509B2 (ja) * | 2006-01-07 | 2012-03-21 | 日本電産株式会社 | 交流電動機の回転子位相推定装置 |
| JP5176406B2 (ja) * | 2007-05-24 | 2013-04-03 | 日本電産株式会社 | 交流電動機の回転子位相速度推定装置 |
| WO2011129423A1 (ja) * | 2010-04-17 | 2011-10-20 | 日本電産株式会社 | 交流電動機の回転子位相速度推定装置 |
| JP2012182859A (ja) * | 2011-02-28 | 2012-09-20 | Denso Corp | 回転機の制御装置 |
| JP5633643B2 (ja) * | 2011-05-10 | 2014-12-03 | 株式会社明電舎 | 永久磁石同期電動機の位置センサレス制御装置 |
-
2013
- 2013-10-28 JP JP2013236286A patent/JP6286733B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015089322A (ja) | 2015-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5720677B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| Shinnaka | A new speed-varying ellipse voltage injection method for sensorless drive of permanent-magnet synchronous motors with pole saliency—New PLL method using high-frequency current component multiplied signal | |
| JP4059039B2 (ja) | 同期電動機の制御装置 | |
| JP4425193B2 (ja) | モータの位置センサレス制御装置 | |
| JP6492320B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| JP2010172080A (ja) | 交流電動機の制御装置 | |
| JP5527025B2 (ja) | 同期機の位置センサレス制御装置 | |
| JP4587110B2 (ja) | 同期電動機駆動制御のための回転子位相推定方法 | |
| JP4644010B2 (ja) | 同期リラクタンス電動機のベクトル制御方法及び同装置 | |
| JP5176406B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| JP3653670B2 (ja) | 同期電動機のベクトル制御方法及び同装置 | |
| JP4899509B2 (ja) | 交流電動機の回転子位相推定装置 | |
| JP6150211B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| WO2004032316A1 (ja) | 電動機の磁極位置推定装置および制御装置 | |
| JP6286733B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| JP6150212B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| JP6311152B2 (ja) | 誘導電動機のための回転子磁束推定装置 | |
| JP4924115B2 (ja) | 永久磁石同期電動機の駆動制御装置 | |
| JP3735836B2 (ja) | 永久磁石同期電動機のベクトル制御方法 | |
| JP5423263B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| JP7302140B2 (ja) | 同期リラクタンス電動機の駆動装置 | |
| JP6422796B2 (ja) | 同期機制御装置及び駆動システム | |
| JP6241807B2 (ja) | 交流電動機の駆動制御装置 | |
| JP5807832B1 (ja) | 誘導電動機のための位相生成装置 | |
| Akgul et al. | Sensorless control of PMaSynRM with HFI method using modified PLL for low speeds |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170627 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170720 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180113 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6286733 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |