JP6272294B2 - 血管内アクセスおよび治療のためのデバイスおよび方法 - Google Patents
血管内アクセスおよび治療のためのデバイスおよび方法 Download PDFInfo
- Publication number
- JP6272294B2 JP6272294B2 JP2015501826A JP2015501826A JP6272294B2 JP 6272294 B2 JP6272294 B2 JP 6272294B2 JP 2015501826 A JP2015501826 A JP 2015501826A JP 2015501826 A JP2015501826 A JP 2015501826A JP 6272294 B2 JP6272294 B2 JP 6272294B2
- Authority
- JP
- Japan
- Prior art keywords
- sheath
- item
- lumen
- needle
- pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 119
- 238000011282 treatment Methods 0.000 title description 14
- 238000002627 tracheal intubation Methods 0.000 claims description 256
- 230000002792 vascular Effects 0.000 claims description 211
- 239000012530 fluid Substances 0.000 claims description 148
- 210000004204 blood vessel Anatomy 0.000 claims description 127
- 239000012528 membrane Substances 0.000 claims description 125
- 230000004044 response Effects 0.000 claims description 79
- 238000003780 insertion Methods 0.000 claims description 65
- 230000037431 insertion Effects 0.000 claims description 64
- 230000036772 blood pressure Effects 0.000 claims description 20
- 230000001965 increasing effect Effects 0.000 claims description 17
- 230000004872 arterial blood pressure Effects 0.000 claims description 9
- 230000003213 activating effect Effects 0.000 claims description 4
- 239000003990 capacitor Substances 0.000 claims 1
- 229910052724 xenon Inorganic materials 0.000 claims 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 claims 1
- 210000004379 membrane Anatomy 0.000 description 121
- 239000000463 material Substances 0.000 description 57
- 210000004369 blood Anatomy 0.000 description 44
- 239000008280 blood Substances 0.000 description 44
- 230000004807 localization Effects 0.000 description 31
- 206010058178 Aortic occlusion Diseases 0.000 description 28
- 208000032843 Hemorrhage Diseases 0.000 description 27
- 208000034158 bleeding Diseases 0.000 description 27
- 231100000319 bleeding Toxicity 0.000 description 27
- 230000000740 bleeding effect Effects 0.000 description 27
- 210000001367 artery Anatomy 0.000 description 24
- 210000001519 tissue Anatomy 0.000 description 24
- 208000014674 injury Diseases 0.000 description 22
- 208000032456 Hemorrhagic Shock Diseases 0.000 description 21
- 206010049771 Shock haemorrhagic Diseases 0.000 description 21
- 230000007246 mechanism Effects 0.000 description 21
- 238000004891 communication Methods 0.000 description 18
- 210000000709 aorta Anatomy 0.000 description 17
- 230000008901 benefit Effects 0.000 description 17
- 238000003384 imaging method Methods 0.000 description 14
- 230000006378 damage Effects 0.000 description 13
- 210000003462 vein Anatomy 0.000 description 13
- 238000004519 manufacturing process Methods 0.000 description 12
- 230000035939 shock Effects 0.000 description 12
- 238000012544 monitoring process Methods 0.000 description 11
- 230000008733 trauma Effects 0.000 description 11
- 208000027418 Wounds and injury Diseases 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- -1 pressors Substances 0.000 description 10
- 210000000056 organ Anatomy 0.000 description 9
- 238000009530 blood pressure measurement Methods 0.000 description 8
- 238000000926 separation method Methods 0.000 description 8
- 206010053648 Vascular occlusion Diseases 0.000 description 7
- 230000009286 beneficial effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000010412 perfusion Effects 0.000 description 7
- 230000002265 prevention Effects 0.000 description 7
- 229910052761 rare earth metal Inorganic materials 0.000 description 7
- 239000000243 solution Substances 0.000 description 7
- 230000006641 stabilisation Effects 0.000 description 7
- 238000011105 stabilization Methods 0.000 description 7
- 208000021331 vascular occlusion disease Diseases 0.000 description 7
- 230000004913 activation Effects 0.000 description 6
- 239000000853 adhesive Substances 0.000 description 6
- 230000001070 adhesive effect Effects 0.000 description 6
- 238000013461 design Methods 0.000 description 6
- 238000005553 drilling Methods 0.000 description 6
- 239000003814 drug Substances 0.000 description 6
- 208000028867 ischemia Diseases 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 150000002910 rare earth metals Chemical class 0.000 description 6
- 238000001356 surgical procedure Methods 0.000 description 6
- 238000005520 cutting process Methods 0.000 description 5
- 239000010408 film Substances 0.000 description 5
- 230000023597 hemostasis Effects 0.000 description 5
- 230000002439 hemostatic effect Effects 0.000 description 5
- 229920001903 high density polyethylene Polymers 0.000 description 5
- 239000004700 high-density polyethylene Substances 0.000 description 5
- 230000004083 survival effect Effects 0.000 description 5
- 238000012360 testing method Methods 0.000 description 5
- 210000005166 vasculature Anatomy 0.000 description 5
- 210000002417 xiphoid bone Anatomy 0.000 description 5
- 229920000544 Gore-Tex Polymers 0.000 description 4
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 4
- 210000001015 abdomen Anatomy 0.000 description 4
- 210000003484 anatomy Anatomy 0.000 description 4
- 238000013459 approach Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 210000000038 chest Anatomy 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 239000004744 fabric Substances 0.000 description 4
- 238000001802 infusion Methods 0.000 description 4
- 210000003734 kidney Anatomy 0.000 description 4
- 229910052751 metal Inorganic materials 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 4
- 239000004810 polytetrafluoroethylene Substances 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000011780 sodium chloride Substances 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- 239000010935 stainless steel Substances 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 230000001960 triggered effect Effects 0.000 description 4
- 230000003966 vascular damage Effects 0.000 description 4
- 206010018852 Haematoma Diseases 0.000 description 3
- 102000001554 Hemoglobins Human genes 0.000 description 3
- 108010054147 Hemoglobins Proteins 0.000 description 3
- 230000001154 acute effect Effects 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 238000012282 endovascular technique Methods 0.000 description 3
- 210000001105 femoral artery Anatomy 0.000 description 3
- 210000002216 heart Anatomy 0.000 description 3
- 238000010438 heat treatment Methods 0.000 description 3
- 230000000004 hemodynamic effect Effects 0.000 description 3
- 208000015181 infectious disease Diseases 0.000 description 3
- 210000000867 larynx Anatomy 0.000 description 3
- 230000000670 limiting effect Effects 0.000 description 3
- 230000036961 partial effect Effects 0.000 description 3
- 230000000149 penetrating effect Effects 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920001643 poly(ether ketone) Polymers 0.000 description 3
- 229920000642 polymer Polymers 0.000 description 3
- 230000001681 protective effect Effects 0.000 description 3
- 230000010349 pulsation Effects 0.000 description 3
- 239000000523 sample Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- 208000031104 Arterial Occlusive disease Diseases 0.000 description 2
- 0 CC1C*CC1 Chemical compound CC1C*CC1 0.000 description 2
- 208000005189 Embolism Diseases 0.000 description 2
- 208000001953 Hypotension Diseases 0.000 description 2
- 208000002193 Pain Diseases 0.000 description 2
- 229920001774 Perfluoroether Polymers 0.000 description 2
- 239000004697 Polyetherimide Substances 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- 206010053476 Traumatic haemorrhage Diseases 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 238000002583 angiography Methods 0.000 description 2
- 208000021328 arterial occlusion Diseases 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 230000034994 death Effects 0.000 description 2
- 231100000517 death Toxicity 0.000 description 2
- 238000011257 definitive treatment Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000002526 effect on cardiovascular system Effects 0.000 description 2
- 239000008151 electrolyte solution Substances 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 210000002409 epiglottis Anatomy 0.000 description 2
- 229920000840 ethylene tetrafluoroethylene copolymer Polymers 0.000 description 2
- 238000001125 extrusion Methods 0.000 description 2
- 238000002594 fluoroscopy Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 208000021822 hypotensive Diseases 0.000 description 2
- 230000001077 hypotensive effect Effects 0.000 description 2
- 230000036512 infertility Effects 0.000 description 2
- 210000000936 intestine Anatomy 0.000 description 2
- 229920000092 linear low density polyethylene Polymers 0.000 description 2
- 239000004707 linear low-density polyethylene Substances 0.000 description 2
- 238000011068 loading method Methods 0.000 description 2
- 238000007726 management method Methods 0.000 description 2
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 206010033675 panniculitis Diseases 0.000 description 2
- 229920002493 poly(chlorotrifluoroethylene) Polymers 0.000 description 2
- 239000005023 polychlorotrifluoroethylene (PCTFE) polymer Substances 0.000 description 2
- 229920001601 polyetherimide Polymers 0.000 description 2
- 229920000573 polyethylene Polymers 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 210000002254 renal artery Anatomy 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 210000004304 subcutaneous tissue Anatomy 0.000 description 2
- 238000002560 therapeutic procedure Methods 0.000 description 2
- 230000008719 thickening Effects 0.000 description 2
- 210000000115 thoracic cavity Anatomy 0.000 description 2
- 210000003437 trachea Anatomy 0.000 description 2
- 238000012549 training Methods 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- 238000012285 ultrasound imaging Methods 0.000 description 2
- 210000003708 urethra Anatomy 0.000 description 2
- 238000012795 verification Methods 0.000 description 2
- UXDBPOWEWOXJCE-DIPNUNPCSA-N 1,2-dihexadecyl-sn-glycero-3-phosphoethanolamine Chemical compound CCCCCCCCCCCCCCCCOC[C@H](COP(O)(=O)OCCN)OCCCCCCCCCCCCCCCC UXDBPOWEWOXJCE-DIPNUNPCSA-N 0.000 description 1
- 206010001526 Air embolism Diseases 0.000 description 1
- 206010003445 Ascites Diseases 0.000 description 1
- 208000008035 Back Pain Diseases 0.000 description 1
- IFTRQJLVEBNKJK-UHFFFAOYSA-N CCC1CCCC1 Chemical compound CCC1CCCC1 IFTRQJLVEBNKJK-UHFFFAOYSA-N 0.000 description 1
- 208000006017 Cardiac Tamponade Diseases 0.000 description 1
- 208000032862 Clinical Deterioration Diseases 0.000 description 1
- 206010010904 Convulsion Diseases 0.000 description 1
- 206010053990 Dacryostenosis acquired Diseases 0.000 description 1
- 229920007925 Ethylene chlorotrifluoroethylene (ECTFE) Polymers 0.000 description 1
- 206010019027 Haemothorax Diseases 0.000 description 1
- 208000013875 Heart injury Diseases 0.000 description 1
- 206010021113 Hypothermia Diseases 0.000 description 1
- 206010021143 Hypoxia Diseases 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 208000012266 Needlestick injury Diseases 0.000 description 1
- 229910052779 Neodymium Inorganic materials 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 206010035765 Pneumothorax traumatic Diseases 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 206010057751 Post procedural discharge Diseases 0.000 description 1
- 206010051182 Postoperative abscess Diseases 0.000 description 1
- 208000004347 Postpericardiotomy Syndrome Diseases 0.000 description 1
- BUGBHKTXTAQXES-UHFFFAOYSA-N Selenium Chemical compound [Se] BUGBHKTXTAQXES-UHFFFAOYSA-N 0.000 description 1
- 208000033809 Suppuration Diseases 0.000 description 1
- 206010044565 Tremor Diseases 0.000 description 1
- 206010046555 Urinary retention Diseases 0.000 description 1
- 208000024248 Vascular System injury Diseases 0.000 description 1
- 208000012339 Vascular injury Diseases 0.000 description 1
- 206010052428 Wound Diseases 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 229940035676 analgesics Drugs 0.000 description 1
- 238000004873 anchoring Methods 0.000 description 1
- 239000000730 antalgic agent Substances 0.000 description 1
- 210000002159 anterior chamber Anatomy 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- 210000002376 aorta thoracic Anatomy 0.000 description 1
- 208000007474 aortic aneurysm Diseases 0.000 description 1
- 210000001099 axilla Anatomy 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008236 biological pathway Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 230000023555 blood coagulation Effects 0.000 description 1
- 230000008081 blood perfusion Effects 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 210000004556 brain Anatomy 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 239000000496 cardiotonic agent Substances 0.000 description 1
- 230000004087 circulation Effects 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 210000004351 coronary vessel Anatomy 0.000 description 1
- 238000002788 crimping Methods 0.000 description 1
- 238000002574 cystoscopy Methods 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 238000007872 degassing Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000035487 diastolic blood pressure Effects 0.000 description 1
- 238000003618 dip coating Methods 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 230000009429 distress Effects 0.000 description 1
- 238000001647 drug administration Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 239000003792 electrolyte Substances 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- BFMKFCLXZSUVPI-UHFFFAOYSA-N ethyl but-3-enoate Chemical compound CCOC(=O)CC=C BFMKFCLXZSUVPI-UHFFFAOYSA-N 0.000 description 1
- 210000000416 exudates and transudate Anatomy 0.000 description 1
- 210000000887 face Anatomy 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 229920002313 fluoropolymer Polymers 0.000 description 1
- 239000004811 fluoropolymer Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 210000003709 heart valve Anatomy 0.000 description 1
- 239000002654 heat shrinkable material Substances 0.000 description 1
- 230000002440 hepatic effect Effects 0.000 description 1
- 208000006454 hepatitis Diseases 0.000 description 1
- 231100000283 hepatitis Toxicity 0.000 description 1
- 230000002631 hypothermal effect Effects 0.000 description 1
- 230000001146 hypoxic effect Effects 0.000 description 1
- 238000009802 hysterectomy Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 238000007912 intraperitoneal administration Methods 0.000 description 1
- 230000000302 ischemic effect Effects 0.000 description 1
- 208000000617 lacrimal duct obstruction Diseases 0.000 description 1
- 238000002357 laparoscopic surgery Methods 0.000 description 1
- 238000003698 laser cutting Methods 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000000520 microinjection Methods 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 210000004165 myocardium Anatomy 0.000 description 1
- 210000003928 nasal cavity Anatomy 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 150000004767 nitrides Chemical class 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 210000004789 organ system Anatomy 0.000 description 1
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 1
- 238000006213 oxygenation reaction Methods 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 210000004197 pelvis Anatomy 0.000 description 1
- 230000009518 penetrating injury Effects 0.000 description 1
- 210000004303 peritoneum Anatomy 0.000 description 1
- 210000003105 phrenic nerve Anatomy 0.000 description 1
- 229920002312 polyamide-imide Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920000915 polyvinyl chloride Polymers 0.000 description 1
- 229910052573 porcelain Inorganic materials 0.000 description 1
- 238000004321 preservation Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 210000004915 pus Anatomy 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000002271 resection Methods 0.000 description 1
- 230000004202 respiratory function Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 229940125723 sedative agent Drugs 0.000 description 1
- 239000000932 sedative agent Substances 0.000 description 1
- 229910052711 selenium Inorganic materials 0.000 description 1
- 239000011669 selenium Substances 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 239000007779 soft material Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 210000000278 spinal cord Anatomy 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 210000001562 sternum Anatomy 0.000 description 1
- 230000035882 stress Effects 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 229920002994 synthetic fiber Polymers 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 229920002725 thermoplastic elastomer Polymers 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 210000000779 thoracic wall Anatomy 0.000 description 1
- 230000000451 tissue damage Effects 0.000 description 1
- 231100000827 tissue damage Toxicity 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000002485 urinary effect Effects 0.000 description 1
- 210000001635 urinary tract Anatomy 0.000 description 1
- 210000002700 urine Anatomy 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
Images















































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M16/00—Devices for influencing the respiratory system of patients by gas treatment, e.g. mouth-to-mouth respiration; Tracheal tubes
- A61M16/04—Tracheal tubes
- A61M16/0488—Mouthpieces; Means for guiding, securing or introducing the tubes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12027—Type of occlusion
- A61B17/12031—Type of occlusion complete occlusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12027—Type of occlusion
- A61B17/1204—Type of occlusion temporary occlusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12099—Occluding by internal devices, e.g. balloons or releasable wires characterised by the location of the occluder
- A61B17/12109—Occluding by internal devices, e.g. balloons or releasable wires characterised by the location of the occluder in a blood vessel
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12131—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device
- A61B17/12136—Balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12131—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device
- A61B17/12168—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device having a mesh structure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12131—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device
- A61B17/12168—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device having a mesh structure
- A61B17/12177—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device having a mesh structure comprising additional materials, e.g. thrombogenic, having filaments, having fibers or being coated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/20—Surgical instruments, devices or methods, e.g. tourniquets for vaccinating or cleaning the skin previous to the vaccination
- A61B17/205—Vaccinating by means of needles or other puncturing devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00867—Material properties shape memory effect
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22038—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with a guide wire
- A61B2017/22042—Details of the tip of the guide wire
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
- A61B2017/3413—Needle locating or guiding means guided by ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/378—Surgical systems with images on a monitor during operation using ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/06—Body-piercing guide needles or the like
Description
本願は、米国出願第13/708,878(2012年12月7日出願)の一部継続出願であり、該米国出願は、米国仮出願第61/568,111(2011年12月7日出願)および米国仮出願第61/612,334(2012年3月18日出願)に対する優先権を主張するものであり、これらの開示の全体は、参照により本明細書中に援用される。また本願は、米国仮出願第61/734,925(2012年12月7日出願)に対する優先権を主張するものであり、その全体は、参照により本明細書中に援用される。
全般:血管アクセスは、大多数の臨床環境および手技での内科治療の決定的要素である。これは、選択的状況および緊急状況の両方で当てはまる。特定の種類の緊急事態である、出血性ショックでは、さらに、大動脈閉塞を行う必要性があり得る。これらの臨床的必要性の両方、すなわち、血管アクセスおよび大動脈閉塞が、本発明の主題である。
II.現在の実践
血管アクセスの現在の実践:
大動脈閉塞の現在の実践
III.血管内大動脈閉塞(EAO)
(項目1)
血管挿管デバイスであって、
遠位先端を伴う遠位端、および近位端を有する、筐体と、
前記筐体および少なくとも前記遠位先端を通過する、ガイドワイヤ管腔と、
前記ガイドワイヤ管腔に連結される、圧力センサと、
ガイドワイヤを前進させるために構成される、ガイドワイヤ前進部材であって、前記ガイドワイヤ前進部材は、前記圧力センサに動作可能に連結される、ガイドワイヤ前進部材と、
を備え、前記デバイスは、前記圧力センサによって検出される正の流体圧力に応答して、ガイドワイヤを前進させることが可能である、血管挿管デバイス。
(項目2)
前記圧力センサは、膜である、項目1に記載の血管挿管デバイス。
(項目3)
前記膜は、圧力動作型隔膜である、項目3に記載の血管挿管デバイス。
(項目4)
前記圧力センサに連結される流体通路をさらに備える、項目1に記載の血管挿管デバイス。
(項目5)
前記流体通路は、生物学的に容認可能な流体で少なくとも部分的に事前充填される、項目4に記載の血管挿管デバイス。
(項目6)
前記筐体の前記遠位先端は、針を備える、項目1に記載の血管挿管デバイス。
(項目7)
前記筐体の前記遠位先端は、組織を穿刺するために構成される、項目1に記載の血管挿管デバイス。
(項目8)
前記圧力センサは、流体と直接接触している、項目1に記載の血管挿管デバイス。
(項目9)
前記流体通路は、前記筐体の前記遠位先端を通過する、項目4に記載の血管挿管デバイス。
(項目10)
前記流体通路に進入する流体は、前記流体通路中の前記圧力を上昇させ、それによって、順に、前記ガイドワイヤ前進部材に係合し、それによって、ガイドワイヤを前進させる、前記圧力センサの移動を引き起こす、項目4に記載の血管挿管デバイス。
(項目11)
前記圧力は、前記前進部材に直接接触することなく、前記ガイドワイヤ前進部材に係合する、項目10に記載の血管挿管デバイス。
(項目12)
前記圧力センサは、生物学的に容認可能な流体で事前充填される、項目4に記載の挿管デバイス。
(項目13)
前記デバイスは、応答時間を短縮するように構成される、項目4に記載の血管挿管デバイス。
(項目14)
前記流体通路は、その一方の端部に前記圧力センサが位置する、Y字形管腔を備える、項目9に記載の血管挿管デバイス。
(項目15)
前記筐体の前記遠位先端は、前記流体通路および前記ガイドワイヤの両方のために構成される管腔を有する、項目9に記載の血管挿管デバイス。
(項目16)
前記流体通路はさらに、前記筐体の前記遠位端に向かって位置する圧力ガスケットを備え、前記圧力ガスケットは、ガイドワイヤを密封して包囲するために構成される、項目13に記載の血管挿管デバイス。
(項目17)
前記圧力センサは、挿管本体の外部に位置する、項目1に記載の血管挿管デバイス。
(項目18)
ガイドワイヤをさらに備える、項目1に記載の血管挿管デバイス。
(項目19)
前記圧力センサは、前記デバイス内の陰圧の生成に依存していない、項目1に記載の血管挿管デバイス。
(項目20)
前記ガイドワイヤ前進部材は、ばねを備える、項目1に記載の血管挿管デバイス。
(項目21)
前記ガイドワイヤ前進部材は、圧縮され、前記圧力センサの動作は、前記ガイドワイヤ前進部材の復元を引き起こし、それによって、ガイドワイヤを前進させる、項目20に記載の血管挿管デバイス。
(項目22)
前記ガイドワイヤ前進部材は、大型圧縮性部材と、小型圧縮性部材とを備え、前記デバイスは、
前記ガイドワイヤ管腔にガイドワイヤを通過させるために構成されるバックプレートと接触している、前記ガイドワイヤ管腔の内側の前記大型圧縮性部材と、
ガイドワイヤを通過させるために構成される開口部を有する、前記大型圧縮性部材と接触しているグリッパと、
前記グリッパと接触している、前記ガイドワイヤ管腔の内側の前記小型圧縮性部材と、
近位端、遠位端、前記ガイドワイヤ管腔にガイドワイヤを通過させるために構成される開口部を有する、摺動可能部材であって、
前記摺動可能部材の前記近位端は、前記小型可撓性部材と接触し、随意に、それを包囲するように構成され、
前記摺動可能部材は、前記筐体内の側面開口部と接触するように位置付けられ、
前記摺動可能部材は、レバーに適応するように構成される、
摺動可能部材と、
前記筐体内の1つ以上の側面開口部を通過するように、および前記摺動可能部材に接触するように構成される、前記筐体の外部に位置付けられる動作可能レバーであって、前記レバーは、前記圧力センサと接触している、レバーと、
を備える、項目20に記載の血管挿管デバイス。
(項目23)
前記圧力センサは、専ら膜である、項目2に記載の血管挿管デバイス。
(項目24)
前記膜は、弾性である、項目2に記載の血管挿管デバイス。
(項目25)
前記膜は、流体圧力に応答して偏向する、項目23または24に記載の血管挿管デバイス。
(項目26)
前記膜は、陽圧に応答して偏向する、項目25に記載の血管挿管デバイス。
(項目27)
前記膜は、0.1Nから60Nの間の力を有する、項目23または24に記載の血管挿管デバイス。
(項目28)
前記膜は、約20mm 2 から約8,000mm 2 に及ぶ表面積を有する、項目23または24に記載の血管挿管デバイス。
(項目29)
前記膜は、約100mm 2 から約500mm 2 に及ぶ表面積を有する、項目23または24に記載の血管挿管デバイス。
(項目30)
前記流体は、血液である、項目24に記載の血管挿管デバイス。
(項目31)
前記膜は、約20mmHg以上の血圧に応答して、偏向し、それによって、ガイドワイヤ前進部材に係合する、項目30に記載の血管挿管デバイス。
(項目32)
前記膜は、約5〜20mmHgの血圧に応答して、偏向し、それによって、ガイドワイヤ前進部材に係合する、項目30に記載の血管挿管デバイス。
(項目33)
前記膜は、拡張可能バルーンを備える、項目2に記載の血管挿管デバイス。
(項目34)
前記膜は、前記膜が約0.02ccから約8ccの体積まで膨張させられたときに前記ガイドワイヤ前進部材に係合するように構成される、項目2に記載の血管挿管デバイス。
(項目35)
前記膜は、前記膜が約0.05ccから約2ccの体積まで膨張させられたときに前記ガイドワイヤ前進部材に係合するように構成される、項目2に記載の血管挿管デバイス。
(項目36)
前記拡張可能バルーンは、ほぼ枕形である、項目33に記載の血管挿管デバイス。
(項目37)
前記膜の拡張は、前記ガイドワイヤ前進部材に係合する、項目36に記載の血管挿管デバイス。
(項目38)
前記膜は、ガイドワイヤ前進部材に係合するプランジャを操作するために構成される、項目2に記載の血管挿管デバイス。
(項目39)
前記膜は、筐体によって包囲される、項目38に記載の血管挿管デバイス。
(項目40)
前記デバイスは、前記筐体内の前記開口部にプランジャを通過させるために構成され、前記プランジャは、前記ガイドワイヤ前進部材に動作可能に連結される、項目39に記載の血管挿管デバイス。
(項目41)
前記プランジャは、前記膜の拡張時に前記ガイドワイヤ前進部材に係合するために構成される、項目38に記載の血管挿管デバイス。
(項目42)
前記ガイドワイヤ前進部材はさらに、アクチュエータが前記筐体と前記アクチュエータとの間にポケットを作成するように構成される、前記筐体に接続される前記アクチュエータを備え、前記膜は、そのポケットの中に位置する、項目39に記載の血管挿管デバイス。
(項目43)
前記膜の拡張は、前記アクチュエータに係合する、項目38に記載の血管挿管デバイス。
(項目44)
前記アクチュエータは、前記膜を包囲する筐体上にヒンジ連結される、項目43に記載の血管挿管デバイス。
(項目45)
前記デバイスはさらに、前記デバイスの前記遠位先端の存在を検出するために構成される撮像システムを含む、項目1に記載の血管挿管デバイス。
(項目46)
前記撮像システムは、超音波撮像システムである、項目45に記載の血管挿管デバイス。
(項目47)
前記デバイスは、前記圧力センサによって検出される正の流体圧力に応答してガイドワイヤを前進させることが可能である、項目1に記載の血管挿管デバイス。
(項目48)
前記デバイスは、前記圧力センサによって検出される正の動脈流体圧力に応答してガイドワイヤを前進させることが可能である、項目1に記載の血管挿管デバイス。
(項目49)
前記デバイスは、前記圧力センサによって検出される脈動流体圧力に応答してガイドワイヤを前進させることが可能である、項目1に記載の血管挿管デバイス。
(項目50)
前記デバイスは、動脈圧または静脈圧のいずれか一方の感知および識別時に、ガイドワイヤの完全自動挿入のために構成される、項目1に記載の血管挿管デバイス。
(項目51)
前記ガイドワイヤ前進部材は、ローラを備える、項目1に記載の血管挿管デバイス。
(項目52)
前記挿管デバイスの前記遠位先端は、ガイドワイヤおよびシースのうちの少なくとも1つによって鈍化される、項目1に記載の血管挿管デバイス。
(項目53)
前記デバイスは、自動展開後の前記ガイドワイヤの手動解放のために構成される、項目1に記載の血管挿管デバイス。
(項目54)
前記流体通路は、圧力チャンバである、項目5に記載の血管挿管デバイス。
(項目55)
前記ガイドワイヤ前進部材は、前記圧力センサを備える、項目1に記載の血管挿管デバイス。
(項目56)
前記ガイドワイヤ前進部材は、前記圧力センサと一体である、項目55に記載の血管挿管デバイス。
(項目57)
前記圧力センサは、前記デバイス内の陰圧の生成に依存していない、項目1に記載の血管挿管デバイス。
(項目58)
前記圧力センサは、陽圧検出器である、項目1に記載の血管挿管デバイス。
(項目59)
血管挿管を提供するための方法であって、
血管に近接近して筐体を有する、血管挿管デバイスを留置するステップと、
前記挿管デバイスの前記筐体上の遠位先端が前記血管を穿刺するまで流体を受容するため、および前記流体が前記遠位先端内の管腔を通過することを可能にするために構成される、前記血管挿管デバイスを前進させるステップと、
正の流体圧力に応答して、前記挿管デバイスの前記筐体に連結される圧力センサを起動するステップと、
前記圧力センサの起動時に、前記筐体および少なくとも前記遠位先端を通過するガイドワイヤ管腔を通してガイドワイヤを前進させ、それによって、血管アクセスを提供するステップと、
を含む、方法。
(項目60)
前記圧力センサは、前記流体と直接接触している、項目59に記載の方法。
(項目61)
前記圧力センサは、流体通路に連結される、項目59に記載の方法。
(項目62)
前記流体通路は、生物学的に容認可能な流体で部分的に事前充填される、項目59に記載の方法。
(項目63)
前記流体通路は、その一方の端部に前記圧力センサが位置する、Y字形管腔を備える、項目59に記載の方法。
(項目64)
前記血管は、動脈であり、前記圧力センサは、圧力が約20mmHgより大きいときに起動される、項目59に記載の方法。
(項目65)
前記血管は、静脈であり、前記圧力センサは、圧力が約5mmHgから約20mmHgの間であるときに起動される、項目59に記載の方法。
(項目66)
前記血管の穿刺と前記ガイドワイヤ前進部材の前方移動の終了との間の期間は、応答時間であり、前記応答時間は、0.02〜1秒の間である、項目59に記載の方法。
(項目67)
前記血管の穿刺と前記ガイドワイヤ前進部材の前方移動の終了との間の期間は、応答時間であり、前記応答時間は、0.05〜0.5秒の間である、項目59に記載の方法。
(項目68)
血管に近接近して前記血管挿管デバイスを留置するステップはさらに、拡張可能シースを通して前記挿管デバイスを挿入するステップを含む、項目59に記載の方法。
(項目69)
閉塞カテーテルを挿入するステップをさらに含む、項目59に記載の方法。
(項目70)
前記閉塞カテーテルの位置は、先端局在化デバイスによって検出される、項目69に記載の方法。
(項目71)
前記カテーテルは、その先端上に希土類磁石を備え、前記先端局在化デバイスは、この磁石の存在を検出する、項目70に記載の方法。
(項目72)
前記圧力センサは、膜である、項目59から71のいずれかに記載の方法。
(項目73)
起動するステップは、前記管腔内の前記圧力に応答して、前記膜の偏向を含む、項目72に記載の方法。
(項目74)
前記部材は、正の流体圧力に応答して偏向する、項目73に記載の方法。
(項目75)
前記膜は、弾性である、項目72に記載の方法。
(項目76)
前記膜は、バルーンである、項目72に記載の方法。
(項目77)
前記弾性膜は、隔膜である、項目72に記載の方法。
(項目78)
起動するステップは、約0.1Nから60Nの間の力を及ぼす前記隔膜を備える、項目77に記載の方法。
(項目79)
前記方法は、血管アクセス、血管閉塞を提供するため、または出血性ショックの治療での使用に好適である、項目59に記載の方法。
(項目80)
前記方法は、大動脈閉塞を提供するために好適である、項目74に記載の方法。
(項目81)
前記ガイドワイヤおよびシースのうちの少なくとも1つを用いて前記挿管デバイスの前記遠位先端を鈍化するステップをさらに含む、項目59に記載の方法。
(項目82)
起動のステップは、前記デバイス内の陰圧に依存しない、項目59に記載の方法。
(項目83)
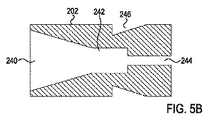
管腔、遠位先端、および近位端を有する、シースハブであって、前記管腔は、針を通過させるために構成される、シースハブと、
前記シースハブの前記遠位端に接続される、拡張可能シースシャフトと、
を備え、
前記拡張可能シースシャフトは、管腔を有し、針を通過させるために構成され、
前記拡張可能シースシャフトは、それぞれ外部に沿って縦方向に及ぶ1つ以上のストリップによって接続される、1つ以上のビームを備え、
前記拡張可能シースは、半径方向に拡張するように構成される、
拡張可能シース。
(項目84)
前記シャフトは、1つ以上のストリップによって接続される1つ以上のビームを備える、外面を有する、項目83に記載の拡張可能シース。
(項目85)
前記1つ以上のビームは、前記1つ以上のストリップより大きい厚さを有する、項目83に記載の拡張可能シース。
(項目86)
前記1つ以上のビームおよび前記1つ以上のストリップは、同一の柔軟材料を含む、項目83に記載の拡張可能シース。
(項目87)
前記1つ以上のビームは、前記シャフトに縦方向剛性を与えるように構成される、項目84に記載の拡張可能シース。
(項目88)
前記シースの前記外面は、完全に平滑である、項目83に記載の拡張可能シース。
(項目89)
前記シースの前記外面はさらに、1つ以上の取付点で前記ビームのみに取り付けられる、外層を備える、項目83に記載の拡張可能シース。
(項目90)
前記ストリップは、実質的に剛性である、項目89に記載の拡張可能シース。
(項目91)
前記1つ以上の取付点は、前記シースの円周のわずかな部分のみを覆う、項目83に記載の拡張可能シース。
(項目92)
前記シースは、縦軸を有し、ビームおよびストリップは、前記シースの縦軸と実質的に平行である、項目83に記載の拡張可能シース。
(項目93)
前記拡張可能シースは、外径および内径を有し、前記内径は、約14Gから22Gの間の針に適合される、項目83に記載の拡張可能シース。
(項目94)
前記1つ以上のストリップは、前記シャフトに半径方向拡張可能性を与えるように構成される、項目83に記載の拡張可能シース。
(項目95)
前記シースシャフトは、前記シャフトの前記近位端から前記シャフトの前記遠位端まで拡張可能であるように構成される、項目83に記載の拡張可能シース。
(項目96)
前記ビームおよびストリップは、前記遠位端における縁が前記縦軸とほぼ垂直であるように、前記シースの前記遠位端に向かって徐々に湾曲する、項目95に記載の拡張可能シース。
(項目97)
前記拡張可能シースシャフトは、先細である、項目83に記載の拡張可能シース。
(項目98)
前記シースシャフトの前記先端は、先細である、項目83に記載の拡張可能シース。
(項目99)
前記シースシャフトの前記先端は、曲線状である、項目83に記載の拡張可能シース。
(項目100)
前記シースシャフトの前記先端を覆う膜をさらに備える、項目83に記載の拡張可能シース。
(項目101)
シースハブの内側の止血弁であって、前記弁は、前記ハブの前記管腔に及ぶ、止血弁と、
前記シースハブへの針ハブアダプタであって、前記針ハブアダプタは、前記シースハブを前記針ハブに接続するため、および針を通過させるために構成される、針ハブアダプタと、
前記シースハブの管腔に接続される流体出口と、
のうちの1つ以上をさらに備える、項目83に記載の拡張可能シース。
(項目102)
前記シースは、針の通過のために構成され、前記シースの前記遠位先端は、前記針の精密嵌合を有する内径を有する、項目83に記載の拡張可能シース。
(項目103)
前記シースハブは、その長さの大部分に沿って、前記拡張可能シースシャフトの前記内径より大きい内径を有する、項目83に記載の拡張可能シース。
(項目104)
前記ビームは、接続される、項目83に記載の拡張可能シース。
(項目105)
前記ビームの間の前記接続は、前記先端のみにある、項目84に記載の拡張可能シース。
(項目106)
前記接続は、前記シャフトの前記近位端の付近にある、項目105に記載の拡張可能シース。
(項目107)
前記ビームの間の前記接続は、シャフトに沿った複数の点にあり、シャフトの遠位端に向かって頻度が増加し、点の間の距離が減少する、項目84に記載の拡張可能シース。
(項目108)
前記ビームおよびストリップは、重複する、項目84に記載の拡張可能シース。
(項目109)
前記シースは、気管内チューブ留置のために構成される、項目84に記載の拡張可能シース。
(項目110)
1つ以上のストリップによって接続される前記1つ以上のビームは、骨格として構成される、項目84に記載の拡張可能シース。
(項目111)
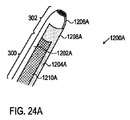
作業管腔、およびバルーン管腔、および遠位先端を有する、カテーテル本体と、
前記カテーテル本体の前記遠位先端に向かって位置する磁石と、
前記バルーン管腔を通した通過のために構成される膨張式バルーンと、
を備え、
前記作業管腔は、前記カテーテル本体の前記遠位先端を通過し、
前記バルーン管腔は、前記磁石に近接する場所で前記カテーテル本体の側面を通過する、
閉塞カテーテル。
(項目112)
前記磁石は、受動磁石である、項目111に記載の閉塞カテーテル。
(項目113)
前記磁石は、希土類磁石である、項目112に記載の閉塞カテーテル。
(項目114)
前記バルーンは、薄型外形を達成するように前記カテーテルの前記先端の遠位で折り畳まれる、項目111に記載の閉塞カテーテル。
(項目115)
前記バルーンはさらに、ワイヤ支持体を備える、項目111に記載の閉塞カテーテル。
(項目116)
前記ワイヤ支持体は、遠位カテーテル先端の遠位で折り畳まれる、前記バルーンの周囲でコイル状である、項目115に記載の閉塞カテーテル。
(項目117)
前記バルーンはさらに、膜支持体を備える、項目111に記載の閉塞カテーテル。
(項目118)
前記バルーンは、前記カテーテル先端と連続的である管状形状を有するように構成され、前記バルーンはさらに、3ATMを上回る高い圧力下で拡張可能であるように構成される、項目111に記載の閉塞カテーテル。
(項目119)
前記バルーンは、移動可能である、項目111に記載の閉塞カテーテル。
(項目120)
前記作業管腔およびバルーン管腔は、一体である、項目111に記載の閉塞カテーテル。
(項目121)
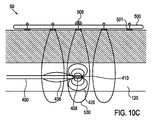
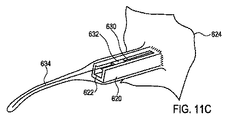
支持体上に搭載される1つ以上の磁場検出器を備える、先端局在化デバイスであって、
前記デバイスは、カテーテル先端の標的領域に近接する患者の身体の外側での留置のために構成され、
前記1つ以上の磁場検出器は、患者の身体の内側の前記磁気カテーテル先端によって放出される磁場を検出することが可能であり、
前記1つ以上の磁場検出器は、前記カテーテル先端の近接性を視覚的に示す、
先端局在化デバイス。
(項目122)
前記支持体は、可撓性である、項目121に記載の先端局在化デバイス。
(項目123)
前記可撓性支持体は、医学的に容認可能な軟質パッドまたは布を備える、項目122に記載の先端局在化デバイス。
(項目124)
前記1つ以上の磁場検出器は、アレイに配列される、項目121に記載の先端局在化デバイス。
(項目125)
前記アレイは、前記1つ以上の磁場検出器の行および列を備える、項目124に記載の先端局在化デバイス。
(項目126)
前記1つ以上の磁場検出器は、3〜8行×3〜8列を備える、アレイに配列される、項目125に記載の先端局在化デバイス。
(項目127)
前記1つ以上の磁場検出器の前記行および列の間の距離は、変化する、項目126に記載の先端局在化デバイス。
(項目128)
前記1つ以上の磁場検出器は、磁場が検出されたときに点灯するLEDを備える、項目126に記載の先端局在化デバイス。
(項目129)
前記デバイスは、前記患者の身体上でほぼ平坦なままとなるように、および検出器区域間の極端な重複を防止するように構成される、項目121に記載の先端局在化デバイス。
(項目130)
項目1に記載の血管挿管デバイスと、
項目83に記載の拡張可能シースと、
項目111に記載の閉塞カテーテルと、
項目121に記載の先端局在化デバイスと、
を備える、血管内大動脈閉塞を行うためのシステム。
(項目131)
項目1に記載の血管挿管デバイスと、
項目83に記載の拡張可能シースと、
項目111に記載の閉塞カテーテルと、
項目121に記載の先端局在化デバイスと、
を備える、出血性ショックを治療するためのシステム。
(項目132)
前記閉塞カテーテルのバルーンの内側の圧力を制御する監視システムをさらに備える、項目131に記載のシステム。
(項目133)
前記閉塞カテーテルの前記バルーンは、重要臓器虚血の予防のために断続的な灌流を可能にするよう断続的に収縮させられる、項目132に記載のシステム。
(項目134)
監視およびオクルダ制御システムをさらに備える、項目131に記載のシステム。
(項目135)
前記システムは、中心血圧および他の生理学的パラメータを監視し、ショック状態時に警告を提供する、項目134に記載のシステム。
(項目136)
前記システムは、自動オクルダ展開を制御する、項目134に記載のシステム。
(項目137)
前記システムは、法医学的目的でパラメータを記録する、項目134に記載のシステム。
(項目138)
遠位先端を伴う遠位端、および近位端を有する、筐体と、
前記筐体および少なくとも前記遠位先端を通過する、ガイドワイヤ管腔と、
前記ガイドワイヤ管腔に連結されるセンサと、
ガイドワイヤまたはシースのうちの少なくとも1つを前進させるために構成される、前進部材であって、前記前進部材は、前記センサに動作可能に連結される、前進部材と、
を備える、血管挿管デバイス。
本発明の一側面では、デバイスおよび方法は、血管アクセスの確立、血管内シースの留置、カテーテル先端の局在化、および血管閉塞の管理を促進するステップを含む、血管内治療を提供する。本発明の一側面では、決定的な治療を提供することができるまで、出血を停止し、負傷者の安定化を可能にするために、血管アクセス、および一時的EAOの迅速で安全かつ容易な展開を促進するためのデバイスおよび方法が提供される。外傷チームによる本発明の使用は、外傷性出血に関係する死亡率の有意な低減をもたらすことが予期される。本発明のある要素はまた、単独で、または他の適応症に組み合わせで利用されてもよい。
I.システム
II.血管挿管デバイス
III.拡張可能シース
IV.閉塞カテーテル
V.定位器
VI.上記のシステムおよびその構成要素への修正および代替実施形態
A.血管挿管デバイスへの修正
B.拡張可能シースへの修正
C.閉塞カテーテルへの修正
D.監視およびオクルダ制御システム
血管挿管デバイス応答時間の測定のための試験が、(図41に示される)デバイスの実施形態269を使用して、電解質溶液で充填された加圧弾性管システムを穿孔することによって行われた。本デバイスは、500Hzの割合でサンプリング入力電圧を用いて、データ収集カードを介してラップトップコンピュータに接続された。
Claims (22)
- 血管挿管デバイスであって、
遠位先端を伴う遠位端と、近位端とを有する筐体(200)と、
前記筐体(200)および少なくとも前記遠位先端を通過する管腔(224、226)と、
センサ(210、270c、270d、292)であって、前記センサは、前記センサ(210)に連結される流体通路(212)によって前記管腔(224、226)に連結され、前記センサは、生理学的パラメータを検出するように構成される、センサ(210、270c、270d、292)と、
鈍化デバイス(12、20、2516)を前進させるために構成される鈍化デバイス前進部材(202、204、2522)であって、前記鈍化デバイス前進部材(201、206、202、204、2522)は、前記センサ(210、270c、270d、292)に動作可能に連結される、鈍化デバイス前進部材(202、204、2522)と
を備え、前記デバイスは、生理学的パラメータが所定の閾値以上であることを前記センサが検出したことに応答して前記鈍化デバイスを自動的に前進させることが可能である、血管挿管デバイス。 - 前記センサ(210、270c、270d、292)は、圧力センサ、伝導度センサ、流量センサ、または超音波センサである、請求項1に記載の血管挿管デバイス。
- 前記センサ(210、270c、270d、292)は、圧力センサであり、前記圧力センサは、膜または圧力動作型隔膜である、請求項1に記載の血管挿管デバイス。
- 前記流体通路(212)は、生物学的に容認可能な流体で少なくとも部分的に事前充填される、請求項1から3のいずれかに記載の血管挿管デバイス。
- 前記流体通路(212)に進入する流体は、前記流体通路(212)中の圧力を上昇させ、それによって、順に、前記鈍化デバイス前進部材(201、206)に係合し、それによって、鈍化デバイス(12、20、2512)を前進させる、前記センサ(210、270c、270d、292)の移動を引き起こす、請求項3または4に記載の血管挿管デバイス。
- 前記センサ(210、270c、270d、292)は、前記デバイス内の陰圧の生成に依存していない、請求項1から5のいずれかに記載の血管挿管デバイス。
- 前記鈍化デバイス前進部材(201、206、202、204、2502、2522)は、ばね(201、206)を備える、請求項1から5のいずれかに記載の血管挿管デバイス。
- 前記鈍化デバイス前進部材は、大型圧縮性部材(201)と小型圧縮性部材(206)とを備えるガイドワイヤ前進部材であり、前記デバイスは、
バックプレート(222)と接触している、前記管腔(224、226)の内側の前記大型圧縮性部材(201)であって、前記大型圧縮性部材(201)は、前記管腔(224、226)にガイドワイヤ(12)を通過させるために構成される、前記大型圧縮性部材(201)と、
前記ガイドワイヤ(12)を通過させるために構成される開口部を有する、前記大型圧縮性部材(201)の遠位端に動作可能に接続されているグリッパ(204)と、
前記グリッパ(204)と接触している、前記管腔の内側の前記小型圧縮性部材(206)と、
近位端と、遠位端と、前記ガイドワイヤ管腔(224、226)に前記ガイドワイヤ(12)を通過させるために構成される開口部とを有する摺動可能部材(202)であって、
前記摺動可能部材(202)の前記近位端は、前記小型圧縮性部材と接触し、随意に、前記小型圧縮性部材を包囲するように構成され、
前記摺動可能部材(202)は、レバー(214、216)に適応するように構成される、摺動可能部材(202)と、
前記摺動可能部材(202)に接触するように適合される少なくとも1つの動作可能レバー(214、216)であって、前記レバー(214、216)は、前記センサと接触している、少なくとも1つの動作可能レバー(214、216)と
を備える、請求項1に記載の血管挿管デバイス。 - 前記センサ(210、270c、270d、292)は、膜であり、前記膜は、正の流体圧力に応答して偏向する、請求項3から8のいずれかに記載の血管挿管デバイス。
- 前記膜は、0.1Nから60Nの間の力、および/または約100mm2から約500mm2、もしくは20mm2から約8,000mm2のうちの1つに及ぶ表面積を有する、請求項9に記載の血管挿管デバイス。
- 前記センサ(210、270c、270d、292)は、約20mmHg以上の血圧に応答して、前記鈍化デバイス前進部材(201、206、202、204、2502、2522)に係合する、請求項1から8のいずれかに記載の血管挿管デバイス。
- 前記センサは、約5〜20mmHgの血圧に応答して、前記鈍化デバイス前進部材(201、206、202、204、2502、2522)に係合する、請求項1から8のいずれかに記載の血管挿管デバイス。
- 前記センサ(273A)は、筐体(272A)によって包囲される、請求項1から8のいずれかに記載の血管挿管デバイス。
- 前記デバイスは、動脈圧または静脈圧のいずれか一方の感知および識別時におけるガイドワイヤ(12)の自動挿入のために構成される、請求項1から8または13のいずれかに記載の血管挿管デバイス。
- 前記センサに動作可能に連結される、前記挿管デバイスの前記遠位先端に、ガイドワイヤまたはシース(2512)をさらに備える、請求項1から8、13または14のいずれかに記載の血管挿管デバイス。
- 前記流体通路(212)に進入する流体は、前記流体通路(212)中の圧力を上昇させ、それによって、順に、前記鈍化デバイス前進部材(201、206)を起動し、それによって、鈍化デバイス(12、20、2512)を前進させる、前記センサ(210、270c、270d、292)の移動を引き起こす、請求項3または4に記載の血管挿管デバイス。
- 前記センサ(210、270c、270d、292)は、約20mmHg以上の血圧に応答して、前記鈍化デバイス前進部材(201、206、202、204、2502、2522)を起動する、請求項1から8のいずれかに記載の血管挿管デバイス。
- 前記センサは、約5〜20mmHgの血圧に応答して、前記鈍化デバイス前進部材(201、206、202、204、2502、2522)を起動する、請求項1から8のいずれかに記載の血管挿管デバイス。
- 前記センサ(273A)は、前記鈍化デバイス前進部材(201、206、202、204、2502、2522)に動作可能に連結されるプランジャ(274)を操作するために構成される、請求項13に記載の血管挿管デバイス。
- 前記鈍化デバイス前進部材(201、206、202、204、2502、2522)は、前記筐体に接続されるアクチュエータと、前記筐体と前記アクチュエータとの間のポケットとを備え、前記センサ(273A)は、前記ポケットの中に位置する、請求項13に記載の血管挿管デバイス。
- 応答時間が、前記遠位先端が血管を貫通するときと前記鈍化デバイス前進部材(201、206、202、204、2502、2522)が前進を終了するときとの間の期間であり、前記応答時間は、0.02〜1秒の間である、請求項1に記載の血管挿管デバイス。
- 応答時間が、前記遠位先端が血管を貫通するときと前記鈍化デバイス前進部材(201、206、202、204、2502、2522)が前進を終了するときとの間の期間であり、前記応答時間は、0.05〜0.5秒の間である、請求項1に記載の血管挿管デバイス。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261612334P | 2012-03-18 | 2012-03-18 | |
| US61/612,334 | 2012-03-18 | ||
| US201261734925P | 2012-12-07 | 2012-12-07 | |
| US61/734,925 | 2012-12-07 | ||
| US13/708,878 US9439653B2 (en) | 2011-12-07 | 2012-12-07 | Devices and methods for endovascular access and therapy |
| US13/708,878 | 2012-12-07 | ||
| PCT/US2013/032641 WO2013142386A1 (en) | 2012-03-18 | 2013-03-15 | Devices and methods for endovascular access and therapy |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017253704A Division JP6734837B2 (ja) | 2012-03-18 | 2017-12-28 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2015510830A JP2015510830A (ja) | 2015-04-13 |
| JP2015510830A5 JP2015510830A5 (ja) | 2016-04-28 |
| JP6272294B2 true JP6272294B2 (ja) | 2018-01-31 |
Family
ID=49223280
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015501826A Active JP6272294B2 (ja) | 2012-03-18 | 2013-03-15 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
| JP2017253704A Active JP6734837B2 (ja) | 2012-03-18 | 2017-12-28 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
| JP2020006691A Pending JP2020062506A (ja) | 2012-03-18 | 2020-01-20 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017253704A Active JP6734837B2 (ja) | 2012-03-18 | 2017-12-28 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
| JP2020006691A Pending JP2020062506A (ja) | 2012-03-18 | 2020-01-20 | 血管内アクセスおよび治療のためのデバイスおよび方法 |
Country Status (6)
| Country | Link |
|---|---|
| EP (2) | EP2827935B1 (ja) |
| JP (3) | JP6272294B2 (ja) |
| CN (2) | CN109394216B (ja) |
| AU (2) | AU2013235348A1 (ja) |
| CA (1) | CA2867460C (ja) |
| WO (1) | WO2013142386A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11154690B2 (en) | 2011-12-07 | 2021-10-26 | Traumatek Solutions, B.V. | Devices and methods for endovascular access and therapy |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015054621A1 (en) * | 2013-10-11 | 2015-04-16 | The Trustees Of Columbia University In The City Of New York | Right angle cannula probe for coronary sinus cannulation |
| US9474466B2 (en) | 2013-12-23 | 2016-10-25 | Biosense Webster (Israel) Ltd. | Low-profile location pad for magnetic-based intra-body probe tracking system |
| US20150272449A1 (en) * | 2014-03-26 | 2015-10-01 | Volcano Corporation | Hybrid Intravascular Pressure Measurement Devices and Associated Systems and Methods |
| CN104586460B (zh) * | 2015-02-14 | 2018-05-15 | 四川大学 | 一种血管穿刺封堵系统 |
| US11712539B2 (en) | 2016-04-27 | 2023-08-01 | Qxmedical, Llc | Devices for assisting with advancement of catheters and related systems and methods |
| US10327667B2 (en) | 2016-05-13 | 2019-06-25 | Becton, Dickinson And Company | Electro-magnetic needle catheter insertion system |
| US11344220B2 (en) | 2016-05-13 | 2022-05-31 | Becton, Dickinson And Company | Invasive medical device cover with magnet |
| US11826522B2 (en) | 2016-06-01 | 2023-11-28 | Becton, Dickinson And Company | Medical devices, systems and methods utilizing permanent magnet and magnetizable feature |
| US11413429B2 (en) | 2016-06-01 | 2022-08-16 | Becton, Dickinson And Company | Medical devices, systems and methods utilizing permanent magnet and magnetizable feature |
| US11116419B2 (en) | 2016-06-01 | 2021-09-14 | Becton, Dickinson And Company | Invasive medical devices including magnetic region and systems and methods |
| US20170347914A1 (en) * | 2016-06-01 | 2017-12-07 | Becton, Dickinson And Company | Invasive Medical Devices Including Magnetic Region And Systems And Methods |
| US10583269B2 (en) | 2016-06-01 | 2020-03-10 | Becton, Dickinson And Company | Magnetized catheters, devices, uses and methods of using magnetized catheters |
| US10032552B2 (en) | 2016-08-30 | 2018-07-24 | Becton, Dickinson And Company | Cover for tissue penetrating device with integrated magnets and magnetic shielding |
| US10821268B2 (en) * | 2016-09-14 | 2020-11-03 | Scientia Vascular, Llc | Integrated coil vascular devices |
| WO2018094029A1 (en) * | 2016-11-17 | 2018-05-24 | Boston Scientific Scimed Inc. | Hydraulic auto crossing balloon/catheter |
| EP3547929A4 (en) * | 2016-12-05 | 2020-12-23 | Cardiosert Ltd. | GUIDE WIRE SYSTEM FOR INTRAVASCULAR PRESSURE MEASUREMENT |
| WO2018106788A1 (en) * | 2016-12-06 | 2018-06-14 | University Of Maryland, Baltimore | Balloon catheter flow device |
| JP6758670B2 (ja) | 2017-01-23 | 2020-09-23 | 学校法人帝京大学 | 気管チューブ挿入補助キット |
| EP3579905B1 (en) * | 2017-02-09 | 2022-11-30 | Boston Scientific Scimed Inc. | Introducer with expandable capabilities |
| EP3366197A1 (en) * | 2017-02-28 | 2018-08-29 | Koninklijke Philips N.V. | Intravascular blood flow measurement |
| CN108618768A (zh) * | 2017-03-15 | 2018-10-09 | 深圳北芯生命科技有限公司 | 带安装座的血管内压力测量导管 |
| ES2926050T3 (es) | 2017-04-27 | 2022-10-21 | Bard Access Systems Inc | Sistema de magnetización para conjuntos de agujas |
| KR101921980B1 (ko) * | 2017-12-28 | 2018-11-27 | 메디퓨처스 주식회사 | 초음파를 이용한 의료용 3차원 실 제조 방법 및 장치 |
| CN111989061A (zh) | 2018-04-13 | 2020-11-24 | 卡尔史托斯两合公司 | 引导系统、方法及其装置 |
| CA3098894A1 (en) * | 2018-05-01 | 2019-11-07 | Becton, Dickinson And Company | Squeeze activated blood collection set |
| US20210299406A1 (en) * | 2018-08-06 | 2021-09-30 | The Regents Of The University Of Colorado, A Body Corporate | System, device, and method for vascular access |
| WO2020096945A1 (en) * | 2018-11-06 | 2020-05-14 | Qxmedical, Llc | Devices for assisting with advancement catheters and related systems and methods |
| US20200205738A1 (en) | 2018-12-31 | 2020-07-02 | Biosense Webster (Israel) Ltd. | Occlusion detection via fluid dilution |
| US20200230391A1 (en) * | 2019-01-18 | 2020-07-23 | Becton, Dickinson And Company | Intravenous therapy system for blood vessel detection and vascular access device placement |
| CN109833094B (zh) * | 2019-02-01 | 2020-07-28 | 中国科学院自动化研究所 | 推送阻力测量装置及介入手术机器人 |
| CN109966024B (zh) * | 2019-04-26 | 2024-02-06 | 中国人民解放军第四军医大学 | 一种心脏动脉瓣返流测试器 |
| CN110074888B (zh) * | 2019-05-07 | 2021-10-15 | 北京大学口腔医学院 | 一种精密控力牙周探针 |
| US20220347432A1 (en) * | 2019-06-19 | 2022-11-03 | Sunnybrook Research Institute | Magnetically-tracked catheter and method for tracking a catheter |
| DE102019007222A1 (de) * | 2019-10-17 | 2021-04-22 | Xenios Ag | Führungselement für ein steuerbares Gefäßaufweitungssystem |
| JP7369589B2 (ja) | 2019-10-23 | 2023-10-26 | 朝日インテック株式会社 | ワイヤ送出装置 |
| WO2021079932A1 (ja) * | 2019-10-23 | 2021-04-29 | 朝日インテック株式会社 | ワイヤ送出装置 |
| CN110960322B (zh) * | 2019-12-23 | 2021-06-15 | 哈尔滨工业大学 | 一种用于内镜输送机器人的十字轴 |
| KR102110729B1 (ko) * | 2020-02-05 | 2020-05-13 | 이병훈 | 이지 카테터 조립체 |
| CN111420168B (zh) * | 2020-04-01 | 2022-03-01 | 山西医科大学第一医院 | 静脉注射装置 |
| KR102120615B1 (ko) * | 2020-05-02 | 2020-06-08 | 이병훈 | 이지 카테터 조립체 |
| US20230173231A1 (en) * | 2020-05-04 | 2023-06-08 | Stallion Catheter, Inc. | Guide catheter |
| WO2022099147A1 (en) | 2020-11-09 | 2022-05-12 | Bard Access Systems, Inc. | Medical device magnetizer |
| GB202105228D0 (en) | 2021-04-13 | 2021-05-26 | Eazyiv Ltd | Device |
| WO2022224360A1 (ja) * | 2021-04-20 | 2022-10-27 | 朝日インテック株式会社 | ワイヤ送出装置 |
| WO2022224359A1 (ja) * | 2021-04-20 | 2022-10-27 | 朝日インテック株式会社 | ワイヤ送出装置 |
| JP7312346B2 (ja) | 2021-11-14 | 2023-07-21 | 株式会社オブリガート | 穿刺装置 |
| CN116965878A (zh) * | 2023-09-21 | 2023-10-31 | 北京普益盛济科技有限公司 | 血管穿刺口止血器 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4721123A (en) * | 1986-10-23 | 1988-01-26 | Minntech Corporation | Catheter reprocessing system |
| US4917094A (en) * | 1987-10-28 | 1990-04-17 | Medical Parameters Inc. | Guidewire advancement system |
| US5176659A (en) * | 1991-02-28 | 1993-01-05 | Mario Mancini | Expandable intravenous catheter and method of using |
| US5527290A (en) * | 1992-08-10 | 1996-06-18 | Zadini; Filiberto | Semi-automatic cannulation device or manually triggered self-propelled catheter cannulation device |
| US6623516B2 (en) * | 1992-08-13 | 2003-09-23 | Mark A. Saab | Method for changing the temperature of a selected body region |
| CA2082741C (en) * | 1992-11-12 | 1998-07-14 | Michikazu Ohnishi | Pillow type pressure detector |
| US5415177A (en) | 1992-12-31 | 1995-05-16 | Zadini; Filiberto P. | Automatic guide wire placement device for intravascular catheters |
| US5320611A (en) * | 1993-02-04 | 1994-06-14 | Peter M. Bonutti | Expandable cannula having longitudinal wire and method of use |
| US5695457A (en) * | 1994-07-28 | 1997-12-09 | Heartport, Inc. | Cardioplegia catheter system |
| US5579780A (en) | 1994-10-11 | 1996-12-03 | Zadini; Filiberto P. | Manual guidewire placement device |
| US5997508A (en) * | 1996-03-28 | 1999-12-07 | Medtronic, Inc. | Expandable percutaneous introducer sheath |
| US6197001B1 (en) * | 1996-09-27 | 2001-03-06 | Becton Dickinson And Company | Vascular access device |
| US6263230B1 (en) * | 1997-05-08 | 2001-07-17 | Lucent Medical Systems, Inc. | System and method to determine the location and orientation of an indwelling medical device |
| US6115624A (en) * | 1997-07-30 | 2000-09-05 | Genesis Technologies, Inc. | Multiparameter fetal monitoring device |
| US6330884B1 (en) * | 1997-11-14 | 2001-12-18 | Transvascular, Inc. | Deformable scaffolding multicellular stent |
| EP1056412B1 (en) * | 1998-01-20 | 2004-01-07 | Orlando Morejon | An endotracheal tube cleaning device |
| US6245052B1 (en) * | 1998-07-08 | 2001-06-12 | Innerdyne, Inc. | Methods, systems, and kits for implanting articles |
| US20020183781A1 (en) * | 2001-04-17 | 2002-12-05 | Brendan Casey | Catheter |
| US7422579B2 (en) * | 2001-05-01 | 2008-09-09 | St. Jude Medical Cardiology Divison, Inc. | Emboli protection devices and related methods of use |
| JP4333363B2 (ja) * | 2001-08-17 | 2009-09-16 | ベクトン・ディキンソン・アンド・カンパニー | 採血アセンブリ |
| JP3772107B2 (ja) * | 2001-10-12 | 2006-05-10 | オリンパス株式会社 | 内視鏡システム |
| JP4430939B2 (ja) * | 2001-12-26 | 2010-03-10 | イエール ユニバーシティ | 血管到達具 |
| US7063679B2 (en) * | 2002-09-20 | 2006-06-20 | Flowmedica, Inc. | Intra-aortic renal delivery catheter |
| DE602004017750D1 (de) * | 2003-08-19 | 2008-12-24 | Nmt Medical Inc | Expandierbarer Schleusenschlauch |
| EP1682034B1 (en) * | 2003-10-09 | 2018-11-21 | Sentreheart, Inc. | Apparatus for the ligation of tissue |
| US20080147002A1 (en) * | 2004-03-23 | 2008-06-19 | Michael Eric Gertner | Obesity treatment systems |
| US20080004571A1 (en) * | 2006-06-28 | 2008-01-03 | Abbott Laboratories | Expandable introducer sheath |
| US7503893B2 (en) * | 2006-02-03 | 2009-03-17 | Cannuflow, Inc. | Anti-extravasation sheath and method |
| US8342183B2 (en) * | 2006-04-19 | 2013-01-01 | Vibrynt, Inc. | Devices and methods for treatment of obesity |
| US8328836B2 (en) * | 2006-05-01 | 2012-12-11 | Ethicon Endo-Surgery, Inc. | Flexible endoscopic safety needle |
| US8409172B2 (en) * | 2006-08-03 | 2013-04-02 | Hansen Medical, Inc. | Systems and methods for performing minimally invasive procedures |
| EP2272432B1 (en) * | 2007-05-07 | 2012-03-14 | Vascular Pathways Inc. | Intravenous catheter insertion and blood sample devices |
| US8211136B2 (en) * | 2007-08-31 | 2012-07-03 | Kimberly-Clark Worldwide, Inc. | Stoma dilator |
| US8721714B2 (en) * | 2008-09-17 | 2014-05-13 | Medtronic Corevalve Llc | Delivery system for deployment of medical devices |
| WO2010124109A1 (en) * | 2009-04-22 | 2010-10-28 | Nuvue Therapeutics, Inc. | Fluid flowing device and method for tissue diagnosis or therapy |
| CA3116363A1 (en) * | 2009-08-19 | 2011-02-24 | Medline Industries, Inc. | Systems, methods, and devices for facilitating access to target anatomical sites or environments |
| US20110301587A1 (en) * | 2010-04-06 | 2011-12-08 | Innovative Pulmonary Solutions, Inc. | System and method for pulmonary treatment |
-
2013
- 2013-03-15 CA CA2867460A patent/CA2867460C/en active Active
- 2013-03-15 EP EP13764355.7A patent/EP2827935B1/en active Active
- 2013-03-15 CN CN201811497097.6A patent/CN109394216B/zh active Active
- 2013-03-15 EP EP17203668.3A patent/EP3308824B1/en active Active
- 2013-03-15 WO PCT/US2013/032641 patent/WO2013142386A1/en active Application Filing
- 2013-03-15 JP JP2015501826A patent/JP6272294B2/ja active Active
- 2013-03-15 CN CN201380023621.5A patent/CN104302345B/zh active Active
- 2013-03-15 AU AU2013235348A patent/AU2013235348A1/en not_active Abandoned
-
2017
- 2017-12-06 AU AU2017272200A patent/AU2017272200B2/en active Active
- 2017-12-28 JP JP2017253704A patent/JP6734837B2/ja active Active
-
2020
- 2020-01-20 JP JP2020006691A patent/JP2020062506A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11154690B2 (en) | 2011-12-07 | 2021-10-26 | Traumatek Solutions, B.V. | Devices and methods for endovascular access and therapy |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018047353A (ja) | 2018-03-29 |
| EP2827935A1 (en) | 2015-01-28 |
| AU2017272200B2 (en) | 2019-10-24 |
| CA2867460C (en) | 2021-08-10 |
| EP3308824A1 (en) | 2018-04-18 |
| CA2867460A1 (en) | 2013-09-26 |
| CN109394216A (zh) | 2019-03-01 |
| CN109394216B (zh) | 2021-11-02 |
| EP2827935B1 (en) | 2018-01-10 |
| AU2017272200A1 (en) | 2018-01-04 |
| EP3308824B1 (en) | 2022-09-07 |
| EP2827935A4 (en) | 2015-10-28 |
| AU2013235348A1 (en) | 2014-10-02 |
| WO2013142386A1 (en) | 2013-09-26 |
| JP2015510830A (ja) | 2015-04-13 |
| JP6734837B2 (ja) | 2020-08-05 |
| JP2020062506A (ja) | 2020-04-23 |
| CN104302345B (zh) | 2019-01-01 |
| CN104302345A (zh) | 2015-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6734837B2 (ja) | 血管内アクセスおよび治療のためのデバイスおよび方法 | |
| US11154690B2 (en) | Devices and methods for endovascular access and therapy | |
| US10124144B2 (en) | Devices and methods for endovascular access and therapy | |
| US11672951B2 (en) | System and method for low-profile occlusion balloon catheter | |
| US10918838B2 (en) | Device for controlling bleeding from a ballistic penetrating or perforating wound | |
| JP2019048059A (ja) | 低プロファイル閉塞バルーンカテーテル用のシステムおよび方法 | |
| US20110213413A1 (en) | Aneurysm sensing devices and delivery systems | |
| US20070083187A1 (en) | Apparatus and methods for delivering stem cells and other agents into cardiac tissue | |
| US20080119785A1 (en) | Enhanced system and method for wound track navigation and hemorrhage control | |
| JP2006523471A (ja) | 血管の内部を治療する方法及び装置 | |
| JP2018528040A (ja) | 穿刺システム | |
| US11129964B2 (en) | Trapping sheaths and guide catheters | |
| SE1551145A1 (en) | Guidance device for ultrasonography guided device placement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170118 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20170414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171129 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6272294 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |