JP6270746B2 - 物体検出装置、及び、車両用衝突防止制御装置 - Google Patents
物体検出装置、及び、車両用衝突防止制御装置 Download PDFInfo
- Publication number
- JP6270746B2 JP6270746B2 JP2015000639A JP2015000639A JP6270746B2 JP 6270746 B2 JP6270746 B2 JP 6270746B2 JP 2015000639 A JP2015000639 A JP 2015000639A JP 2015000639 A JP2015000639 A JP 2015000639A JP 6270746 B2 JP6270746 B2 JP 6270746B2
- Authority
- JP
- Japan
- Prior art keywords
- detection
- vehicle
- light
- unit
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 289
- 230000002265 prevention Effects 0.000 title claims description 53
- 238000005259 measurement Methods 0.000 claims description 67
- 238000012544 monitoring process Methods 0.000 claims description 62
- 238000000034 method Methods 0.000 description 40
- 238000004364 calculation method Methods 0.000 description 39
- 238000010586 diagram Methods 0.000 description 22
- 230000003287 optical effect Effects 0.000 description 19
- 230000001133 acceleration Effects 0.000 description 13
- 238000005070 sampling Methods 0.000 description 10
- 238000013459 approach Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- ORQBXQOJMQIAOY-UHFFFAOYSA-N nobelium Chemical compound [No] ORQBXQOJMQIAOY-UHFFFAOYSA-N 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images





















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4808—Evaluating distance, position or velocity data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- B60W2420/408—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4861—Circuits for detection, sampling, integration or read-out
- G01S7/4863—Detector arrays, e.g. charge-transfer gates
Description
これにより、車両の進行方向にある坂の検出精度が向上する。
この判別部には、監視領域内の各方向の検出距離の車幅方向の変化がなだらかである場合、検出物体が坂である可能性があると判定させ、監視領域内の各方向の検出距離の車幅方向の変化がなだらかでない場合、検出物体が坂である可能性がないと判定させることができる。
1.実施の形態
2.変形例
{車載システム1の構成例}
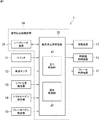
図1は、本発明の一実施の形態である車載システム1の構成例を示している。
図2は、レーザレーダ装置31の構成例を示している。レーザレーダ装置31は、制御部61、測定光投光部62、受光部63、測定部64、及び、演算部65を含むように構成される。
図3は、レーザレーダ装置31の測定光投光部62の構成例を示している。測定光投光部62は、駆動回路101、発光素子102、及び、投光光学系103を含むように構成される。
図4は、レーザレーダ装置31の受光部63の構成例を示している。受光部63は、受光光学系201及び受光素子202−1乃至202−16を含むように構成される。
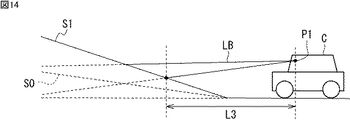
ここで、図5乃至図7を参照して、監視領域及び検出領域の具体例について説明する。図5は、レーザレーダ装置31が設けられた車両Cを横から見た場合の測定光の照射範囲を模式的に示している。図6は、車両Cを上から見た場合の各検出領域の位置を模式的に示している。図7は、受光部63を上から見た場合の各受光素子202と各検出領域との関係を模式的に示している。なお、図7では、図を分かりやすくするために、各検出領域からの反射光のうち受光光学系201のレンズの中央を通る光線のみを模式的に示している。
図8は、レーザレーダ装置31の測定部64の構成例を示している。測定部64は、電流電圧変換部251、増幅部252、及び、サンプリング部253を含むように構成される。電流電圧変換部251は、トランス・インピーダンス・アンプ(TIA)261−1乃至261−16を含むように構成される。増幅部252は、プログラマブル・ゲイン・アンプ(PGA)262−1乃至262−16を含むように構成される。サンプリング部253は、A/Dコンバータ(ADC)263−1乃至263−16を含むように構成される。また、TIA261−i、PGA262−i及びADC263−i(i=1乃至16)は、それぞれ直列に接続されている。
図9は、演算部65の機能の構成例を示している。演算部65は、検出部301、判別部302、及び、指令部303を含むように構成される。
次に、図10のフローチャートを参照して、車載システム1により実行される発進時衝突防止制御処理について説明する。なお、この処理は、例えば、自車両の発進が可能な位置にスイッチ11が設定されたとき開始される。
tanθ3=(h0−ht)/Lmin ・・・(2)
以下、上述した本発明の実施の形態の変形例について説明する。
衝突防止制御装置の構成は、図1及び図2に示される例に限定されるものではなく、必要に応じて変更することが可能である。
以上の説明では、検出領域毎の検出距離が水平方向になだらかに変化している場合に、検出された物体が坂の可能性があると判定する例を示した。
また、例えば、発進制限や前進の禁止を行う場合に、レーザレーダ装置31の指令部303が、運転者への警報を通知制御部42に指令するようにしてもよい。そして、通知制御部42が、運転者への警報を警報装置17に実行させるようにしてもよい。例えば、通知制御部42が、ディスプレイに警告画面を表示させたり、インジケータランプを点灯又は点滅させたり、警告音やブザー等を鳴らしたりして、運転者への警報を行うようにしてもよい。
本発明は、上述した例以外にも、車両に設けられ、所定の監視方向に測定光を投光し、測定光の反射光の強度に基づいて物体の検出を行う装置やシステムに適用することができる。
なお、上述した一連の処理は、ハードウエアにより実行することもできるし、ソフトウエアにより実行することもできる。一連の処理をソフトウエアにより実行する場合には、そのソフトウエアを構成するプログラムが、コンピュータにインストールされる。ここで、コンピュータには、専用のハードウエアに組み込まれているコンピュータや、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどが含まれる。
11 スイッチ
12 車速センサ
13 シフト位置検出器
14 アクセルペダル検出器
15 ブレーキペダル検出器
16 衝突防止制御装置
18 原動機制御装置
19 ブレーキ制御装置
31 レーザレーダ装置
32 衝突防止演算装置
41 走行制御部
61 制御部
62 測定光投光部
63 受光部
64 測定部
65 演算部
102 発光素子
202−1乃至202−16 受光素子
301 検出部
302 判別部
303 指令部
311 ピーク検出部
312 物体検出部
501 レーザレーダ装置
511 制御部
512 駆動回路
513 スキャナ
514 走査位置検出部
515 測定部
516 演算部
521 発光素子
524 受光素子
Claims (7)
- 車両に搭載され、前記車両の進行方向にある物体を検出する物体検出装置において、
前記進行方向において前記車両の車幅方向に放射状に広がる領域である監視領域内に測定光を投光する投光部と、
前記監視領域内の複数の方向からの前記測定光の反射光を受光し、各方向の前記反射光の強度に応じた受光信号を出力する受光部と、
前記測定光が投光されてから前記反射光を受光するまでの時間差に基づいて、前記監視領域内の各方向の物体までの距離を検出する検出部と、
前記検出部により検出された物体である検出物体の判別を行う判別部と
を備え、
前記判別部は、前記検出物体までの検出距離が、前記車両が登坂可能な最大勾配の坂に対して検出されると想定される最短距離未満である場合、前記検出物体が登坂可能な坂でないと判定する
物体検出装置。 - 前記判別部は、前記監視領域内の各方向の検出距離の前記車幅方向の変化に基づいて、前記検出物体が坂である可能性があるか否かを判定する
請求項1に記載の物体検出装置。 - 前記判別部は、前記監視領域内の各方向の検出距離の前記車幅方向の変化がなだらかである場合、前記検出物体が坂である可能性があると判定し、前記監視領域内の各方向の検出距離の前記車幅方向の変化がなだらかでない場合、前記検出物体が坂である可能性がないと判定する
請求項2に記載の物体検出装置。 - 前記判別部は、前記監視領域内の各方向の検出距離の前記車幅方向の変化がなだらかである場合であって、外部からの情報により前記車両の前記検出物体の方向への移動が検出されているにも関わらず、前記検出物体までの検出距離が長くなった場合、前記検出物体が坂であると判定する
請求項3に記載の物体検出装置。 - 前記投光部は、前記監視領域内に放射状に広がるように前記測定光を投光し、
前記受光部は、前記車幅方向に並べられた複数の受光素子を備え、
各前記受光素子は、前記監視領域内の各方向からの前記反射光をそれぞれ受光し、受光した前記反射光の強度に応じた受光信号を出力する
請求項1に記載の物体検出装置。 - 前記投光部は、前記監視領域内において前記測定光を前記車幅方向に走査する
請求項1に記載の物体検出装置。 - 車両用衝突防止制御装置であって、
前記車両の進行方向において車幅方向に放射状に広がる領域である監視領域内に測定光を投光する投光部と、
前記監視領域内の複数の方向からの前記測定光の反射光を受光し、各方向の前記反射光の強度に応じた受光信号を出力する受光部と、
前記測定光が投光されてから前記反射光を受光するまでの時間差に基づいて、前記監視領域内の各方向の物体までの距離を検出する検出部と、
前記車両の走行を制御する走行制御部と
を備え、
前記走行制御部は、前記検出部により検出された物体である検出物体までの検出距離が、前記車両が登坂可能な最大勾配の坂に対して検出されると想定される最短距離未満である場合、前記車両の前記進行方向への走行を禁止する制御を行う
車両用衝突防止制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000639A JP6270746B2 (ja) | 2015-01-06 | 2015-01-06 | 物体検出装置、及び、車両用衝突防止制御装置 |
| KR1020150187087A KR20160084804A (ko) | 2015-01-06 | 2015-12-28 | 물체 검출 장치, 및, 차량용 충돌 방지 제어 장치 |
| DE102016200067.5A DE102016200067A1 (de) | 2015-01-06 | 2016-01-06 | Objektermittlungsvorrichtung und fahrzeugaufprallvermeidungssteuervorrichtung |
| US14/989,503 US9945951B2 (en) | 2015-01-06 | 2016-01-06 | Object detecting apparatus and vehicle collision avoidance control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015000639A JP6270746B2 (ja) | 2015-01-06 | 2015-01-06 | 物体検出装置、及び、車両用衝突防止制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016125925A JP2016125925A (ja) | 2016-07-11 |
| JP6270746B2 true JP6270746B2 (ja) | 2018-01-31 |
Family
ID=56133228
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015000639A Expired - Fee Related JP6270746B2 (ja) | 2015-01-06 | 2015-01-06 | 物体検出装置、及び、車両用衝突防止制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9945951B2 (ja) |
| JP (1) | JP6270746B2 (ja) |
| KR (1) | KR20160084804A (ja) |
| DE (1) | DE102016200067A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3418152B1 (en) * | 2016-09-06 | 2023-01-25 | Mazda Motor Corporation | Vehicle control device |
| US10351129B2 (en) * | 2017-01-13 | 2019-07-16 | Ford Global Technologies, Llc | Collision mitigation and avoidance |
| JP6332491B1 (ja) * | 2017-02-13 | 2018-05-30 | オムロン株式会社 | レーザ照明装置およびこれを備えた周辺監視センサ |
| US11151395B2 (en) * | 2017-08-07 | 2021-10-19 | Hitachi Astemo, Ltd. | Roadside object detection device, roadside object detection method, and roadside object detection system |
| CN107672599B (zh) * | 2017-09-06 | 2020-09-22 | 北京汽车集团越野车有限公司 | 一种雷达系统控制方法、控制装置及汽车 |
| DE102017220397A1 (de) * | 2017-11-15 | 2019-05-16 | Osram Gmbh | Abstandsmesseinheit |
| WO2020017393A1 (ja) * | 2018-07-20 | 2020-01-23 | キヤノン株式会社 | 光学系、それを備える照明装置及び測距装置 |
| US11328605B2 (en) * | 2019-03-26 | 2022-05-10 | Toyota Jidosha Kabushiki Kaisha | Adjustable blind spot monitor |
| CN110406489B (zh) * | 2019-07-29 | 2021-05-25 | 江铃汽车股份有限公司 | 车载雷达报警显示方法、系统及车载终端 |
| CN111257903B (zh) * | 2020-01-09 | 2022-08-09 | 广州微牌智能科技有限公司 | 车辆定位方法、装置、计算机设备和存储介质 |
| JP7419085B2 (ja) * | 2020-01-29 | 2024-01-22 | 本田技研工業株式会社 | 認識装置、認識システム、方法、およびプログラム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05124453A (ja) | 1991-11-08 | 1993-05-21 | Jatco Corp | 走行制御装置 |
| JPH0735862A (ja) * | 1993-07-20 | 1995-02-07 | Komatsu Ltd | 走行車両の障害物検出装置 |
| US5714928A (en) | 1992-12-18 | 1998-02-03 | Kabushiki Kaisha Komatsu Seisakusho | System for preventing collision for vehicle |
| JP4197209B2 (ja) * | 1999-05-21 | 2008-12-17 | 株式会社小松製作所 | 車両の無人走行システム |
| JP2004280489A (ja) | 2003-03-17 | 2004-10-07 | Hitachi Ltd | 車両の衝突防止制御装置 |
| JP2008140013A (ja) | 2006-11-30 | 2008-06-19 | Denso Corp | 障害物検出装置 |
| US8812226B2 (en) * | 2009-01-26 | 2014-08-19 | GM Global Technology Operations LLC | Multiobject fusion module for collision preparation system |
| KR100899820B1 (ko) * | 2009-03-03 | 2009-05-27 | 국방과학연구소 | 자율 이동 차량용 지면/장애물 판별장치 및 판별방법 |
| JP5603625B2 (ja) * | 2010-03-24 | 2014-10-08 | 本田技研工業株式会社 | 物体検出装置 |
| JP5267592B2 (ja) * | 2010-04-09 | 2013-08-21 | 株式会社デンソー | 物体認識装置 |
| US8260539B2 (en) * | 2010-05-12 | 2012-09-04 | GM Global Technology Operations LLC | Object and vehicle detection and tracking using 3-D laser rangefinder |
| JP2012192862A (ja) * | 2011-03-17 | 2012-10-11 | Toyota Motor Corp | 車両制御装置 |
| JP6128979B2 (ja) | 2013-06-14 | 2017-05-17 | 株式会社クボタ | 農作業車両 |
| US8825260B1 (en) * | 2013-07-23 | 2014-09-02 | Google Inc. | Object and ground segmentation from a sparse one-dimensional range data |
-
2015
- 2015-01-06 JP JP2015000639A patent/JP6270746B2/ja not_active Expired - Fee Related
- 2015-12-28 KR KR1020150187087A patent/KR20160084804A/ko unknown
-
2016
- 2016-01-06 DE DE102016200067.5A patent/DE102016200067A1/de not_active Withdrawn
- 2016-01-06 US US14/989,503 patent/US9945951B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016125925A (ja) | 2016-07-11 |
| US20160195615A1 (en) | 2016-07-07 |
| KR20160084804A (ko) | 2016-07-14 |
| US9945951B2 (en) | 2018-04-17 |
| DE102016200067A1 (de) | 2016-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6270746B2 (ja) | 物体検出装置、及び、車両用衝突防止制御装置 | |
| JP5387531B2 (ja) | 走行支援装置 | |
| US9157998B2 (en) | Laser radar device placed on glass surface of vehicle | |
| US10053067B2 (en) | Vehicle safety assist system | |
| KR101071362B1 (ko) | 차량의 물체 거리 인식 시스템 및 작동 방법 | |
| US9751528B2 (en) | In-vehicle control device | |
| US9827956B2 (en) | Method and device for detecting a braking situation | |
| US8638205B2 (en) | Device for preventing a collision of a pivoting element of a vehicle | |
| US20140293264A1 (en) | Laser radar device | |
| JP6320050B2 (ja) | レーザレーダ装置 | |
| KR20200023691A (ko) | 차량 주행 제어 장치 및 방법 | |
| CN109094567B (zh) | 汽车安全防护方法和装置 | |
| KR101500162B1 (ko) | 차량 제동 제어 시스템 및 방법 | |
| JP4274028B2 (ja) | 車両用レーダ装置 | |
| JP2010249668A (ja) | 車両用物体検知装置 | |
| KR20140049136A (ko) | 주차 지원 장치 및 방법과 이를 이용한 주차 지원 시스템 | |
| JP2008014722A (ja) | レーダ装置 | |
| JP5494729B2 (ja) | 接近報知装置 | |
| KR20200070854A (ko) | 근거리 컷-인 차량 판단 장치 및 그의 판단 방법과 그를 이용하는 차량 | |
| JP2019086402A (ja) | 車両用障害物検知装置 | |
| KR20130067651A (ko) | 사각지대 회피 시스템 및 그 방법 | |
| KR101316306B1 (ko) | 차량의 스마트 크루즈 컨트롤 시스템 및 그 제어방법 | |
| JP2004125636A (ja) | 車載用レーザレーダ装置 | |
| JP2016048179A (ja) | レーザレーダ装置及び物体検出方法 | |
| WO2016194135A1 (ja) | 車両制御装置及び車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20171226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6270746 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |