JP6224995B2 - 焦点調節装置、撮像装置、焦点調節方法、及びプログラム - Google Patents
焦点調節装置、撮像装置、焦点調節方法、及びプログラムInfo
- Publication number
- JP6224995B2 JP6224995B2 JP2013234312A JP2013234312A JP6224995B2 JP 6224995 B2 JP6224995 B2 JP 6224995B2 JP 2013234312 A JP2013234312 A JP 2013234312A JP 2013234312 A JP2013234312 A JP 2013234312A JP 6224995 B2 JP6224995 B2 JP 6224995B2
- Authority
- JP
- Japan
- Prior art keywords
- focus
- evaluation value
- sampling interval
- focus adjustment
- acquired
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Studio Devices (AREA)
- Focusing (AREA)
- Automatic Focus Adjustment (AREA)
Description
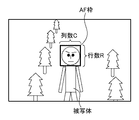
以下に、第1の実施形態を、図1A〜図8及び図11〜図13に基づいて詳細に説明する。図2は、焦点調節装置を有する撮像装置1の概略構成を示すブロック図である。撮像装置1は、例えば、デジタルスチルカメラやデジタルビデオカメラであってもよいが、これに限るものではない。例えば、入射する光学像をエリアセンサなどの2次元配列された固体センサを用いて光電変換により電気的な画像として取得するものであれば、いかなる装置に対しても本発明を適用することが可能である。
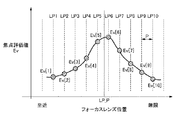
L1:y=((Ev[7]−Ev[6])/(LP7−LP6))×x+((LP7×Ev[6]−LP6×Ev[7])/(LP7−LP6))
で求めることができる。
L2:y=−((Ev[7]−Ev[6])/(LP7−LP6))×x+Ev[5]+((Ev[7]−Ev[6])/(LP7−LP6))×LP5
で求めることができる。
LP_P=(Ev[5]+((Ev[7]−Ev[6])/(LP7−LP6))×LP5−((LP7×Ev[6]−LP6×Ev[7])/(LP7−LP6)))/(2×((Ev[7]−Ev[6])/(LP7−LP6)))
となる。ここでは、3点から直線近似を行う方法を示したが、4点から行ってもよい。或いは、図8に示すように、最大値から三番目に大きい値までが一列に並んでいる場合には、最大値Ev[6]をとるレンズ位置LP6の位置をLP_Pとするような、場合分けを行ってもよい。
以下、図9及び図10を参照して、第2の実施形態にについて説明する。第2の実施形態では、複数帯域での焦点評価値の計算が行われる。本実施形態において、撮像装置1の基本的な構成は、第1の実施形態と同様である(図2参照)。
P’=(i[k]×M)P (M=定数)
であり、i[k]×Mは整数である方がよい。図10の例では、M=1.4の場合、k=2の時に、i[k]×M=2(即ち、P’=2P)となる。そこで、MPU15は、フィルタ[2]を選択し、サンプリング間隔P’=2Pとする。より一般的に言えば、MPU15は、各フィルタに対応するP’のうち、Pの整数倍に最も近いものを最終的なP’として決定する。但し、Pの整数倍に最も近いものがPの完全な整数倍でない場合は、MPU15は、Pの整数倍に最も近く、且つPの完全な整数倍であるものを、最終的なP’として決定する。
上記の実施形態では、被写体の合焦状態の変化を、フォーカスレンズ群3の移動により実現した。しかしながら、合焦状態の変化を実現する方法については、これに限らない。例えば、フォーカスレンズ群3ではなくCCD5を移動させることにより合焦状態の変化を実現してもよい。この場合、CCD5が焦点調節部材としての役割を果たす。また、光線の入射角度情報(ライトフィールド情報)を取得できる撮像装置であれば、再構成処理により合焦状態の変化を実現してもよい。
Claims (10)
- 焦点調節部材の位置を移動させることにより焦点調節を行う焦点調節手段と、
撮像素子の出力信号に基づいて焦点評価値を取得する評価値取得手段と、
前記焦点調節手段に前記焦点調節部材の位置を第1のサンプリング間隔で移動させ、前記評価値取得手段に各位置に対応する焦点評価値を取得させる制御手段と、
前記各位置に対応する焦点評価値に基づき、前記評価値取得手段により取得される焦点評価値の最大値からの変化の急峻性の指標となる、前記焦点調節部材の位置の移動量を取得する移動量取得手段と、
前記移動量に基づいて第2のサンプリング間隔を決定する決定手段と、
前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値に基づいて、合焦位置を検出する検出手段と、
を備えることを特徴とする焦点調節装置。 - 前記検出手段は、前記焦点調節手段に前記焦点調節部材の位置を前記第2のサンプリング間隔で移動させ、前記評価値取得手段に各位置に対応する焦点評価値を取得させることにより、前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値を取得する
ことを特徴とする請求項1に記載の焦点調節装置。 - 前記決定手段は、前記第2のサンプリング間隔が前記第1のサンプリング間隔の整数倍となるように、前記第2のサンプリング間隔を決定し、
前記検出手段は、前記焦点調節部材の前記第1のサンプリング間隔での各位置に対応する焦点評価値から、前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値を取得する
ことを特徴とする請求項1に記載の焦点調節装置。 - 複数の帯域のうちの1つを選択し、前記撮像素子の出力信号の当該選択した帯域を通過させるフィルタ手段を更に備え、
前記決定手段は、
前記複数の帯域それぞれが選択された状態で前記評価値取得手段により取得された焦点評価値に基づいて前記移動量取得手段により取得された各移動量について、第2のサンプリング間隔を決定し、
前記複数の帯域それぞれに対応する第2のサンプリング間隔のうち、前記第1のサンプリング間隔の整数倍に最も近いものを選択し、前記第1のサンプリング間隔の整数倍であって当該選択した第2のサンプリング間隔に最も近い値を、最終的な前記第2のサンプリング間隔として決定し、
前記検出手段は、前記最終的な第2のサンプリング間隔に対応する帯域が選択された状態で前記評価値取得手段により取得された焦点評価値に基づいて、前記合焦位置を検出する
ことを特徴とする請求項1に記載の焦点調節装置。 - 前記検出手段は、
異なる複数の位置を開始位置として、各開始位置について前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値を取得し、
前記各開始位置について、前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値に基づいて、合焦位置を検出し、
前記各開始位置に対応する合焦位置の平均値を最終的な前記合焦位置として検出する
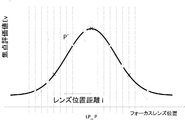
ことを特徴とする請求項1乃至4のいずれか1項に記載の焦点調節装置。 - 前記移動量取得手段は、前記評価値取得手段により取得される焦点評価値の最大値に対応する前記焦点調節部材の位置と、当該焦点評価値の変化の変曲点に対応する前記焦点調節部材の位置との距離を、前記移動量として取得する
ことを特徴とする請求項1乃至5のいずれか1項に記載の焦点調節装置。 - 前記移動量取得手段は、前記評価値取得手段により取得される焦点評価値の半値幅に対応する前記焦点調節部材の位置間の距離を、前記移動量として取得する
ことを特徴とする請求項1乃至6のいずれか1項に記載の焦点調節装置。 - 請求項1乃至7のいずれか1項に記載の焦点調節装置と、
前記撮像素子と、
を備えることを特徴とする撮像装置。 - 焦点調節装置による焦点調節方法であって、
前記焦点調節装置の焦点調節手段が、焦点調節部材の位置を移動させることにより焦点調節を行う焦点調節工程と、
前記焦点調節装置の評価値取得手段が、撮像素子の出力信号に基づいて焦点評価値を取得する評価値取得工程と、
前記焦点調節装置の制御手段が、前記焦点調節工程により前記焦点調節部材の位置を第1のサンプリング間隔で移動させ、前記評価値取得工程により各位置に対応する焦点評価値を取得する制御工程と、
前記焦点調節装置の移動量取得手段が、前記各位置に対応する焦点評価値に基づき、前記評価値取得工程により取得される焦点評価値の最大値からの変化の急峻性の指標となる、前記焦点調節部材の位置の移動量を取得する移動量取得工程と、
前記焦点調節装置の決定手段が、前記移動量に基づいて第2のサンプリング間隔を決定する決定工程と、
前記焦点調節装置の検出手段が、前記焦点調節部材の前記第2のサンプリング間隔での各位置に対応する焦点評価値に基づいて、合焦位置を検出する検出工程と、
を備えることを特徴とする焦点調節方法。 - コンピュータを、請求項1乃至7のいずれか1項に記載の焦点調節装置の各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013234312A JP6224995B2 (ja) | 2013-11-12 | 2013-11-12 | 焦点調節装置、撮像装置、焦点調節方法、及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013234312A JP6224995B2 (ja) | 2013-11-12 | 2013-11-12 | 焦点調節装置、撮像装置、焦点調節方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015094859A JP2015094859A (ja) | 2015-05-18 |
| JP6224995B2 true JP6224995B2 (ja) | 2017-11-01 |
Family
ID=53197292
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013234312A Expired - Fee Related JP6224995B2 (ja) | 2013-11-12 | 2013-11-12 | 焦点調節装置、撮像装置、焦点調節方法、及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6224995B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3103587B2 (ja) * | 1990-04-25 | 2000-10-30 | オリンパス光学工業株式会社 | 自動合焦装置 |
| JP3547777B2 (ja) * | 1993-11-19 | 2004-07-28 | 富士写真フイルム株式会社 | オートフォーカス装置 |
| JP2009048136A (ja) * | 2007-08-23 | 2009-03-05 | Fujifilm Corp | 焦点調節装置及び焦点調節方法 |
| JP5106143B2 (ja) * | 2008-01-21 | 2012-12-26 | キヤノン株式会社 | 自動焦点調整装置及びその自動焦点調整方法 |
| JP5417899B2 (ja) * | 2009-02-27 | 2014-02-19 | 株式会社ニコン | 焦点検出装置及び撮像装置 |
| KR101085925B1 (ko) * | 2010-03-23 | 2011-11-23 | 삼성전자주식회사 | 복수개의 밴드패스필터를 이용하여 자동초점 조절 기능을 수행하는 촬영장치 및 이에 적용되는 자동초점 조절방법 |
| JP5762156B2 (ja) * | 2011-06-08 | 2015-08-12 | キヤノン株式会社 | 撮像装置、その焦点調整方法およびプログラム |
-
2013
- 2013-11-12 JP JP2013234312A patent/JP6224995B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2015094859A (ja) | 2015-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5609270B2 (ja) | 撮像装置、撮像システム、撮像装置の制御方法およびプログラム | |
| JP5621325B2 (ja) | 焦点制御装置、焦点制御方法、レンズ装置、フォーカスレンズ駆動方法、および、プログラム | |
| JP4886210B2 (ja) | 撮像装置 | |
| JP2011248159A (ja) | 撮像装置、撮像システム、撮像装置の制御方法およびプログラム | |
| JP2018087864A (ja) | 焦点調節装置及び焦点調節装置の制御方法 | |
| JP6116277B2 (ja) | 撮像装置及びその制御方法 | |
| JP5769773B2 (ja) | カメラシステム及び焦点検出画素の補正方法 | |
| JP5106143B2 (ja) | 自動焦点調整装置及びその自動焦点調整方法 | |
| JP6478534B2 (ja) | フォーカス制御装置、撮像装置、交換レンズ、フォーカス制御方法およびフォーカス制御プログラム | |
| US11399130B2 (en) | Focus adjustment device and focus adjustment method | |
| JP2019008005A (ja) | 制御装置、撮像装置、制御方法、プログラム、および、記憶媒体 | |
| JP4700993B2 (ja) | 撮像装置 | |
| JP6220144B2 (ja) | 焦点調節装置およびその制御方法 | |
| JP2014102290A (ja) | 自動焦点調整装置 | |
| JP7039326B2 (ja) | 焦点調節装置及び焦点調節装置の制御方法 | |
| JP2014077976A (ja) | 焦点調節装置及びそれを用いた撮像装置 | |
| JP6224995B2 (ja) | 焦点調節装置、撮像装置、焦点調節方法、及びプログラム | |
| JP6351310B2 (ja) | 撮像装置及びその制御方法、プログラム、記憶媒体 | |
| JP2018101110A (ja) | 焦点検出装置 | |
| JP2009198975A (ja) | 焦点調整装置およびその焦点調整方法 | |
| US9832364B2 (en) | Automatic focal adjustment apparatus and method of controlling automatic focal adjustment apparatus, and image capture apparatus | |
| JP2010078681A (ja) | 自動焦点調整装置および方法、並びにプログラム | |
| JP5106146B2 (ja) | 自動焦点調整装置 | |
| JP6366374B2 (ja) | 焦点検出装置及びその制御方法 | |
| JP2005242271A (ja) | オートフォーカスカメラ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170731 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170908 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20171006 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6224995 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |